

Hydraulic support straightening method based on maximum correntropy Kalman filtering algorithm
-
摘要: 现有液压支架调直方法受到传感器测量误差和液压支架推移误差的影响,使得调直误差较大;且在非高斯量测噪声环境下,传统基于卡尔曼滤波(KF)算法的调直方法对液压支架轨迹的预测准确度低,无法达到理想的调直效果。针对上述问题,提出了一种基于最大熵卡尔曼滤波(MCKF)算法的液压支架调直方法。首先根据液压支架的位置坐标和工作面推进方向确定调直参考直线;然后根据液压支架调直原理构建液压支架线性推移系统的状态方程和观测方程,经MCKF算法处理后得到液压支架推移后的预测轨迹;最后根据液压支架预测轨迹与调直参考直线解算出每架液压支架的推移距离补偿量,从而达到调直目的。仿真结果表明:与现有基于KF算法的调直方法相比,基于MCKF算法的液压支架调直方法能够有效降低量测噪声和过程噪声对液压支架直线度的影响,特别当量测噪声服从非高斯分布时,该方法的均方误差平均值仅为4.76 mm,远小于基于KF算法的调直方法的均方误差,可以更加准确地预测液压支架的真实轨迹,使调直后液压支架的直线度误差降低了36%,有效提高了调直精度,且液压支架直线度误差只与本次调直过程有关,有效避免了累计误差。Abstract: The existing hydraulic support straightening method is affected by the sensor measurement error and the hydraulic support moving error, which make the straightening error larger. In the non-Gaussian measurement noise environment, the traditional Kalman filter (KF) straightening method has low accuracy in predicting the trajectory of the hydraulic support, and cannot achieve the ideal straightening effect. In order to solve the above problems, a hydraulic support straightening method based on maximum correntropy Kalman filtering (MCKF) algorithm is proposed. Firstly, the straightening reference line is determined according to the position coordinates of the hydraulic support and the advancing direction of the working face. Secondly, the state equation and observation equation of the linear moving system of hydraulic support is constructed according to the straightening principle of hydraulic support. After MCKF algorithm processing, the predicted trajectory of hydraulic support after moving is obtained. Finally, the moving distance compensation amount of each hydraulic support is calculated according to the predicted trajectory of the hydraulic support and the straightening reference line, so as to achieve the purpose of straightening. The simulation results show that the hydraulic support straightening method based on the MCKF algorithm can effectively reduce the influence of measurement noise and process noise on the straightness of the hydraulic support compared with the existing straightening method based on the KF algorithm. When the measurement noise obeys non-Gaussian distribution, the average of mean square error of the method is only 4.76 mm, which is far less than the mean square error of the straightening method based on the KF algorithm. The real trajectory of the hydraulic support can be predicted more accurately, which reduces the straightening error of the hydraulic support by 36% after straightening. The method thus effectively improves the straightening precision. The straightening error of the hydraulic support is only related to this straightening process, which effectively avoids the accumulated error.
-
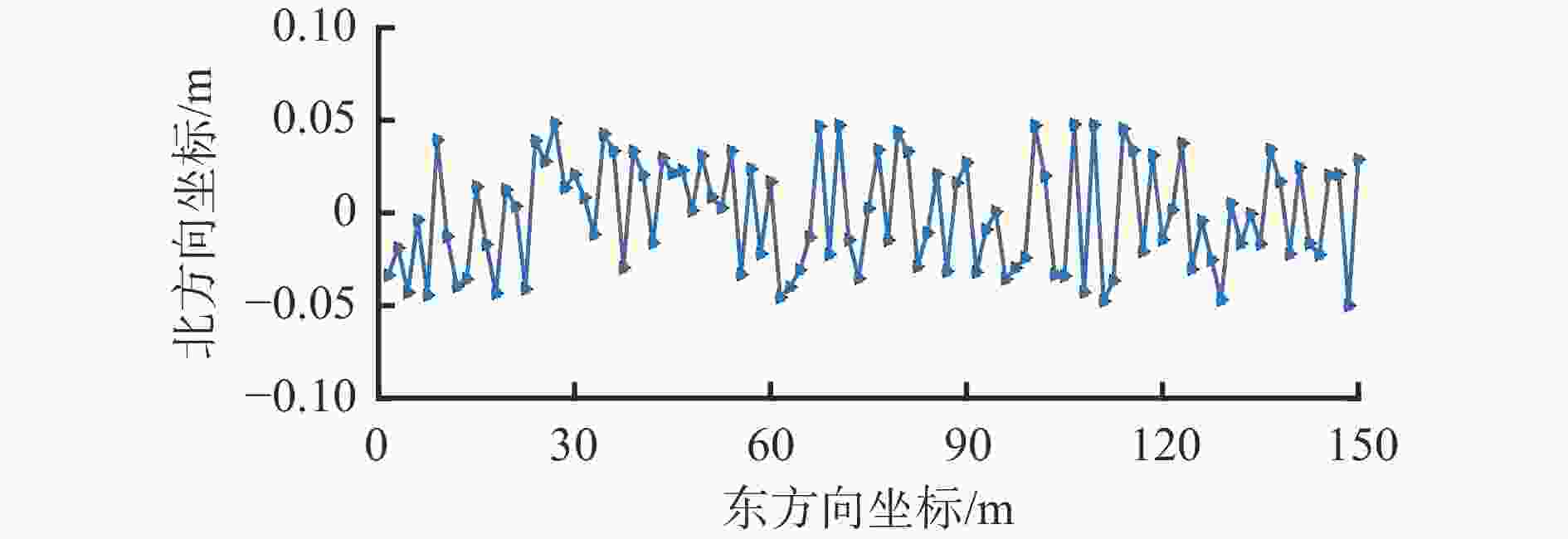
图 2 高斯噪声条件下液压支架初始轨迹
Figure 2. Initial trajectory of hydraulic support under condition of Gaussian noise

图 3 高斯噪声条件下液压支架推移轨迹
Figure 3. Moving trajectory of hydraulic support under condition of Gaussian noise
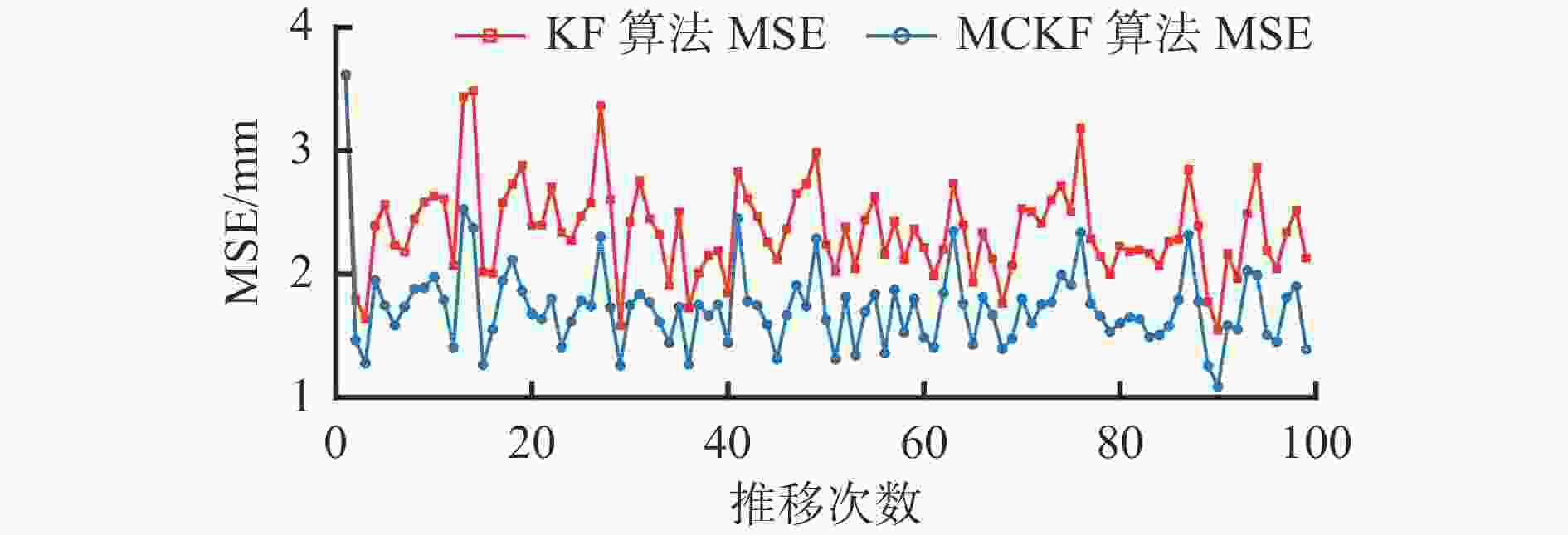
图 4 高斯噪声条件下KF算法与MCKF算法预测轨迹的MSE
Figure 4. Mean square errors of prediction trajectory of KF algorithm and MCKF algorithm under condition of Gaussian noise
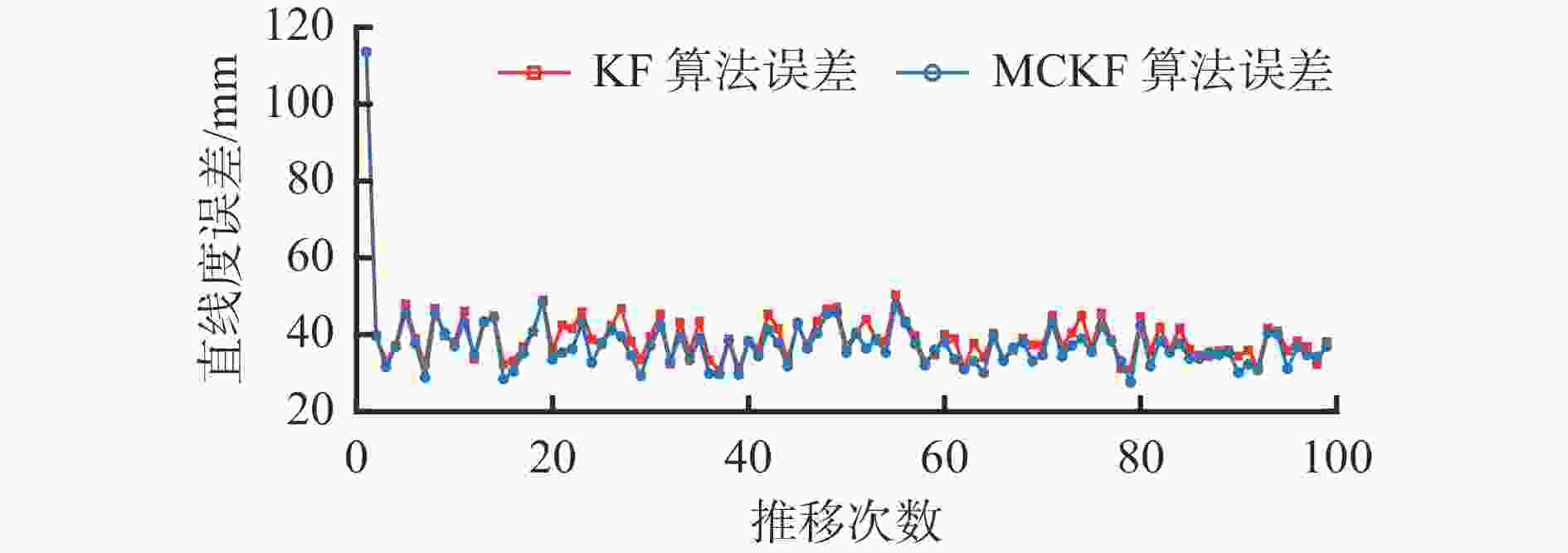
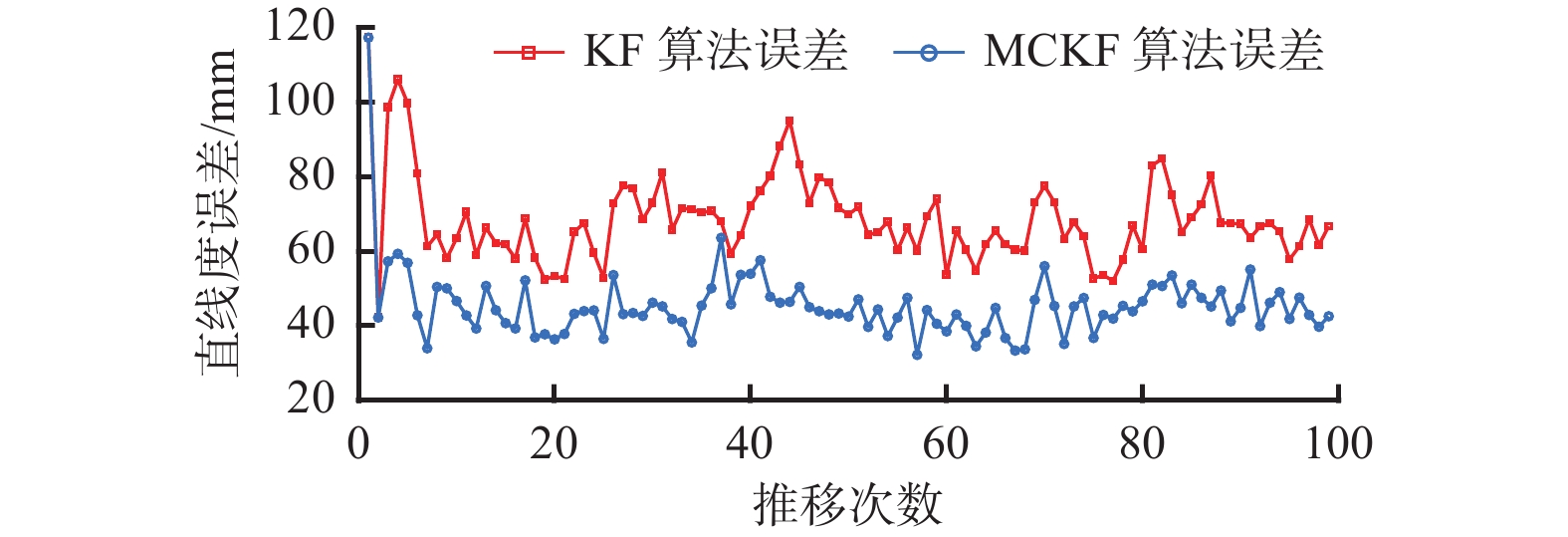
图 5 高斯噪声条件下液压支架直线度误差随推移次数变化曲线
Figure 5. Variation curves of the straightness error of hydraulic support with moving number under condition of Gaussian noise
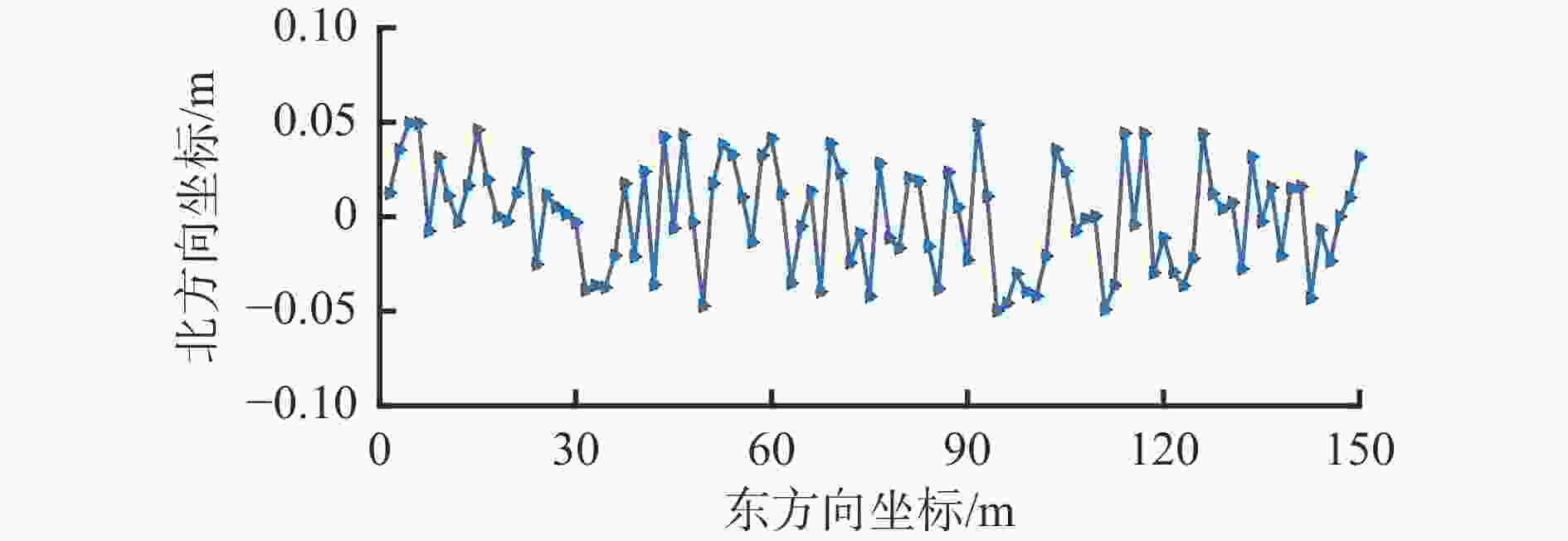
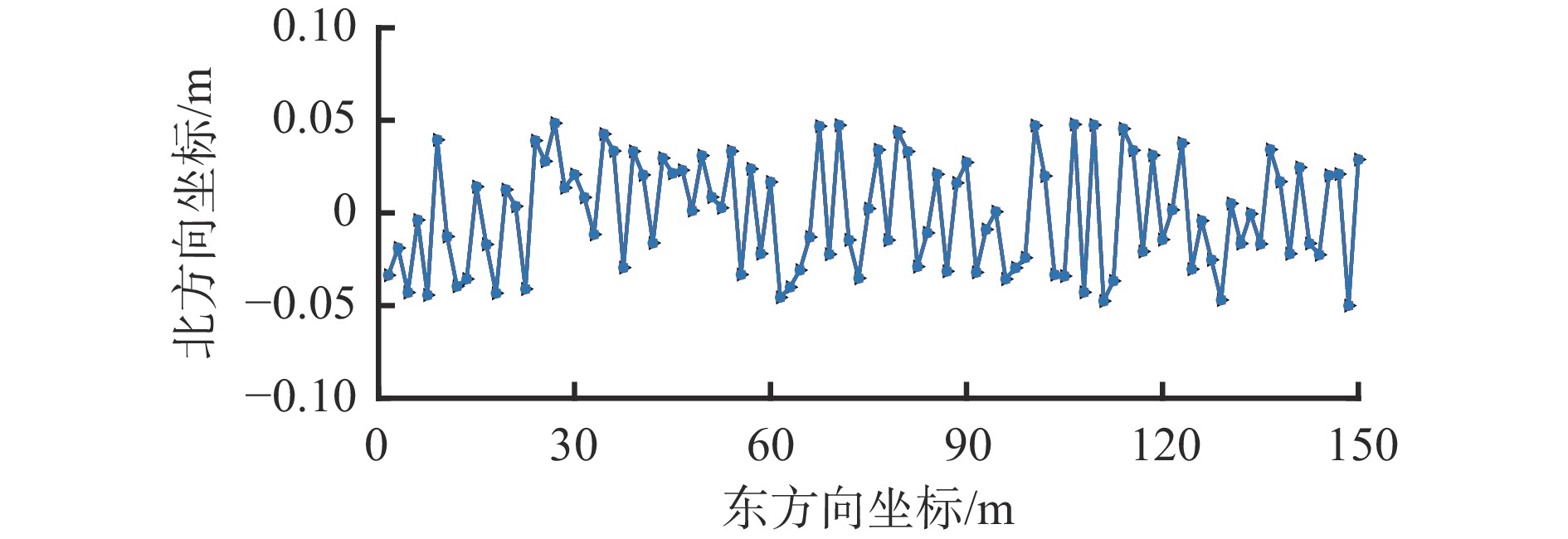
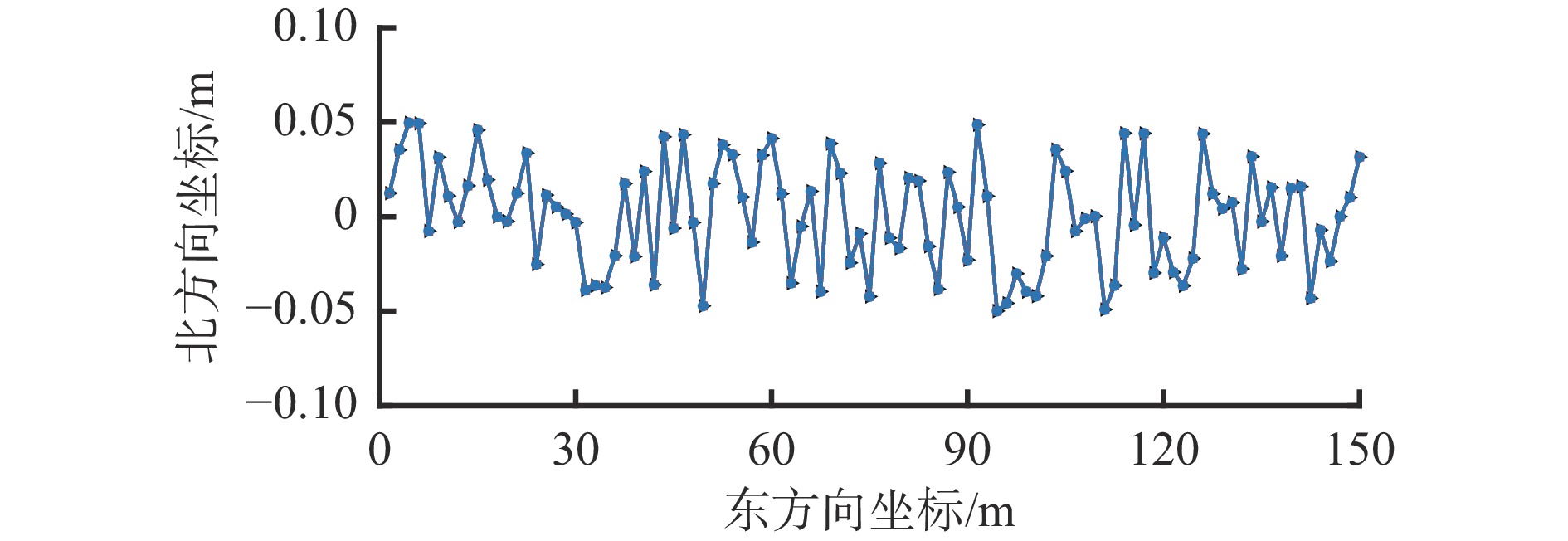
图 6 非高斯噪声条件下液压支架初始轨迹
Figure 6. Initial trajectory of hydraulic support under condition of non-Gaussian noise
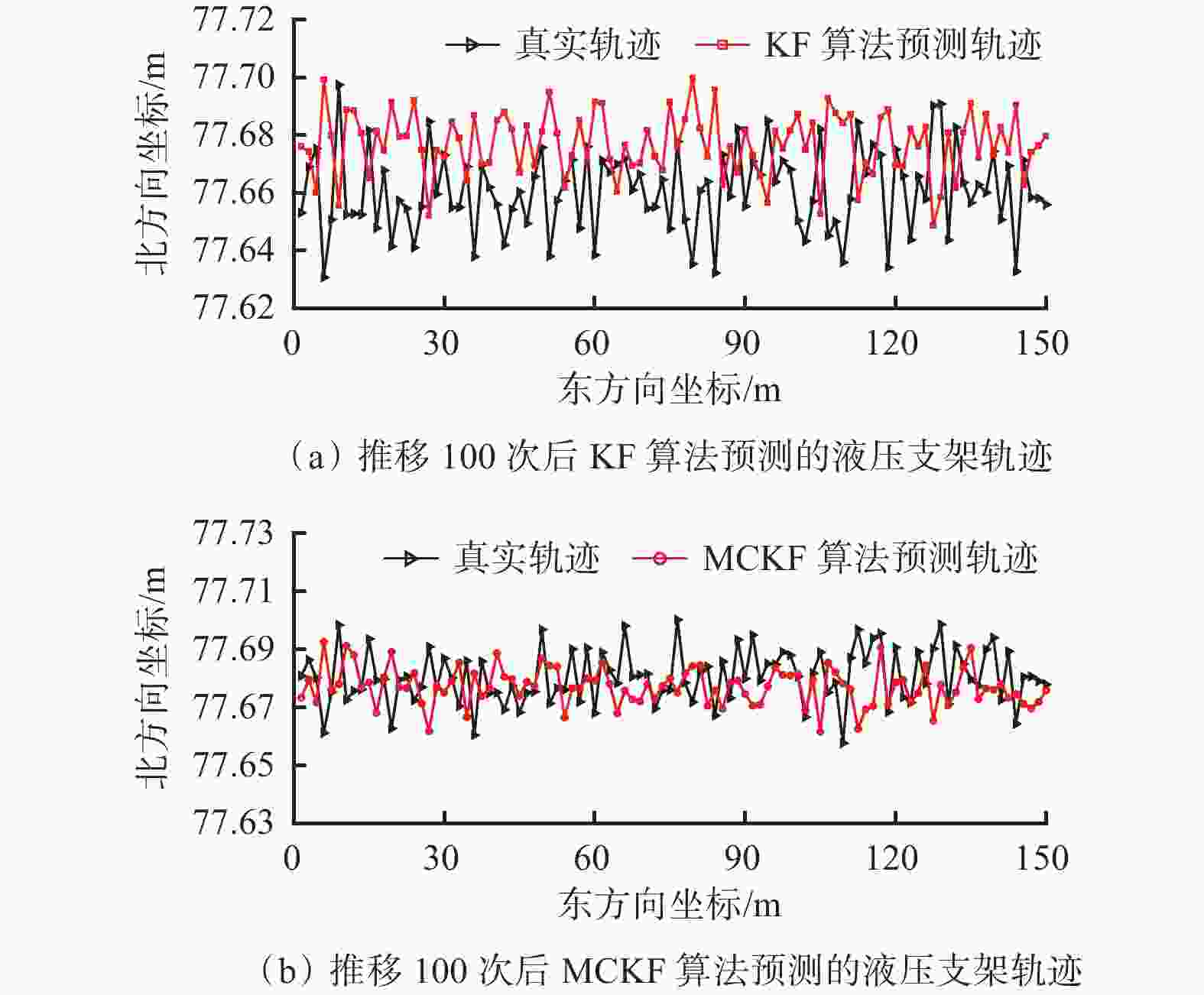
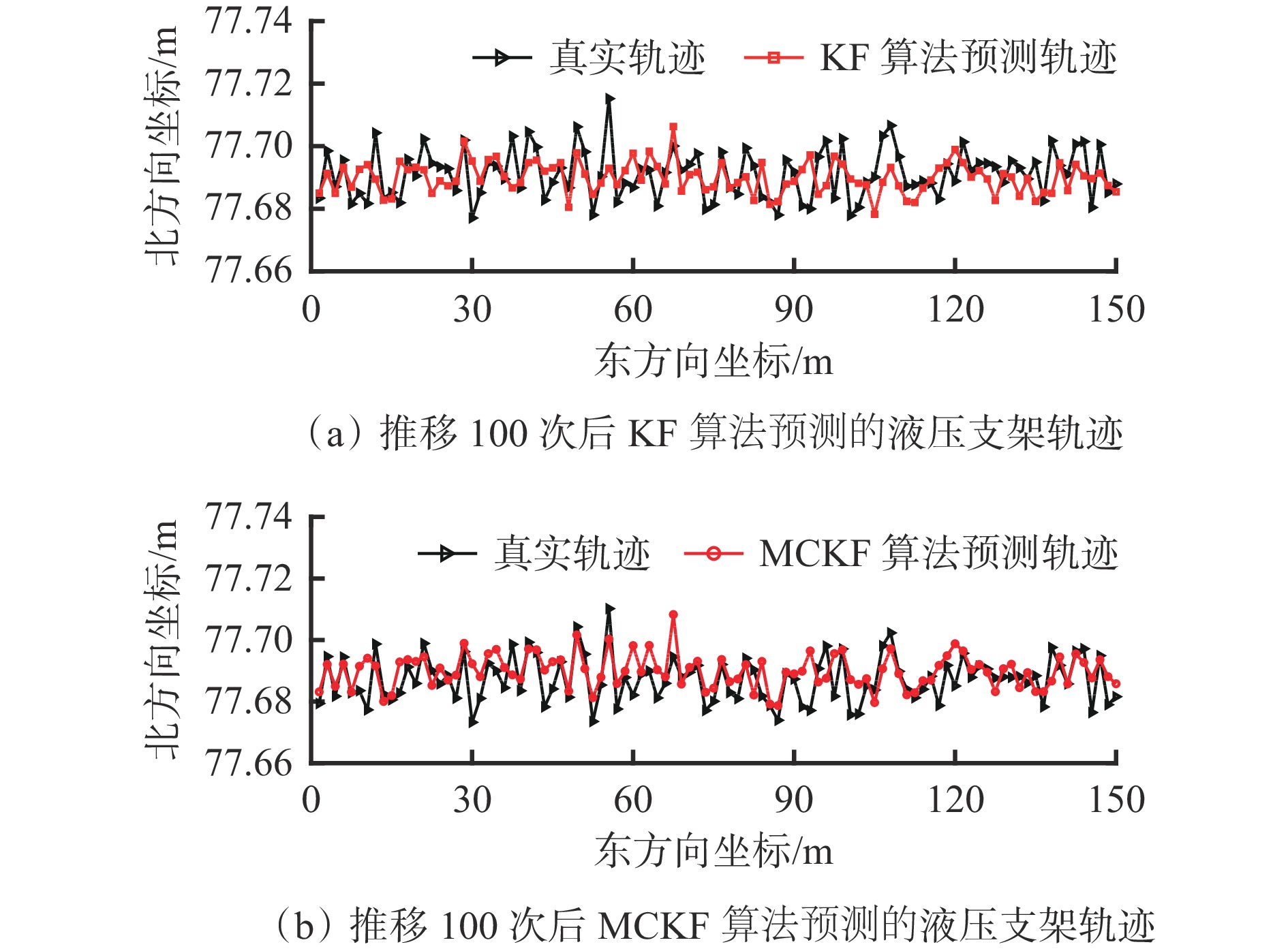
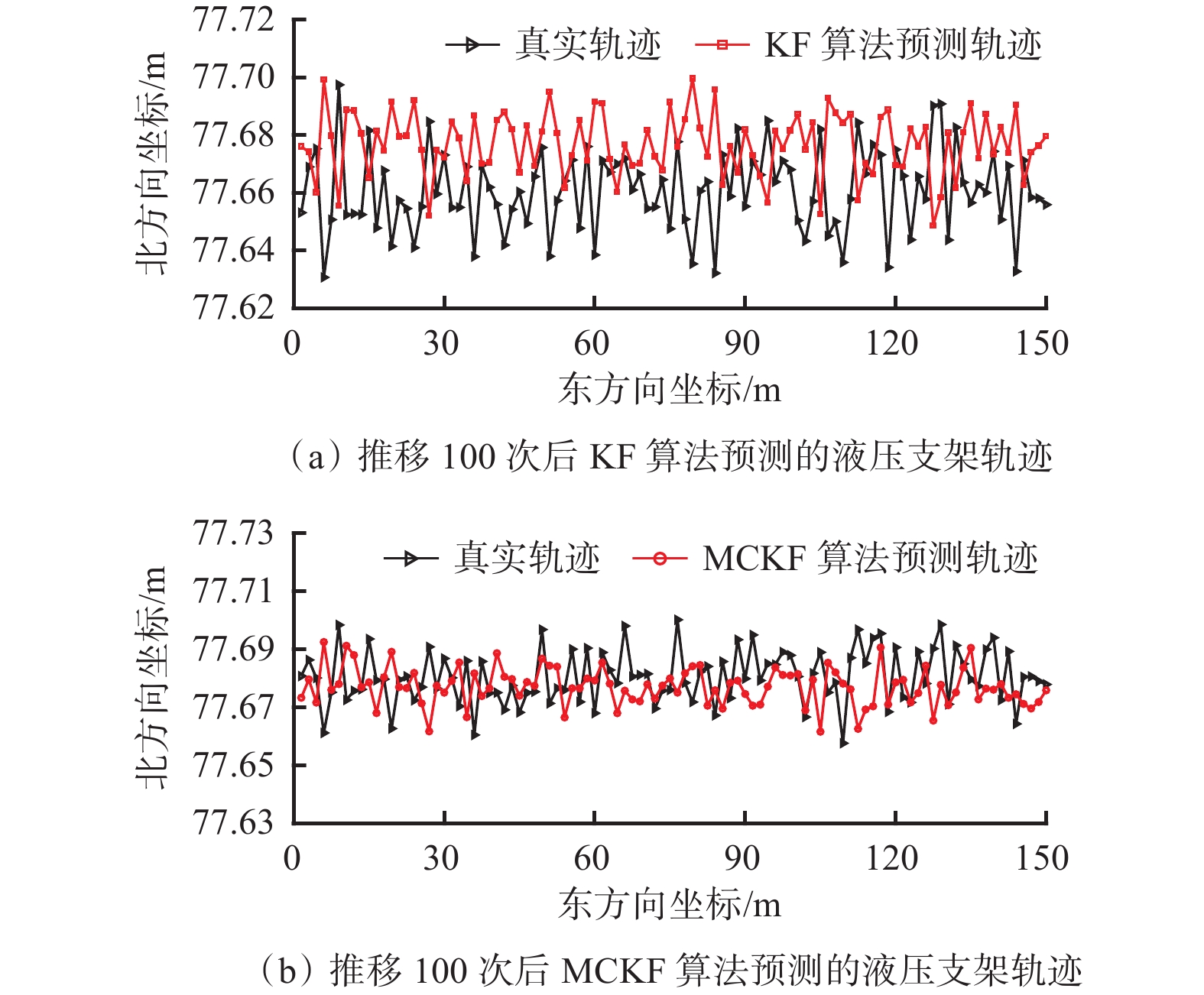
图 7 非高斯噪声条件下液压支架推移轨迹
Figure 7. Moving trajectory of hydraulic support under condition of non-Gaussian noise
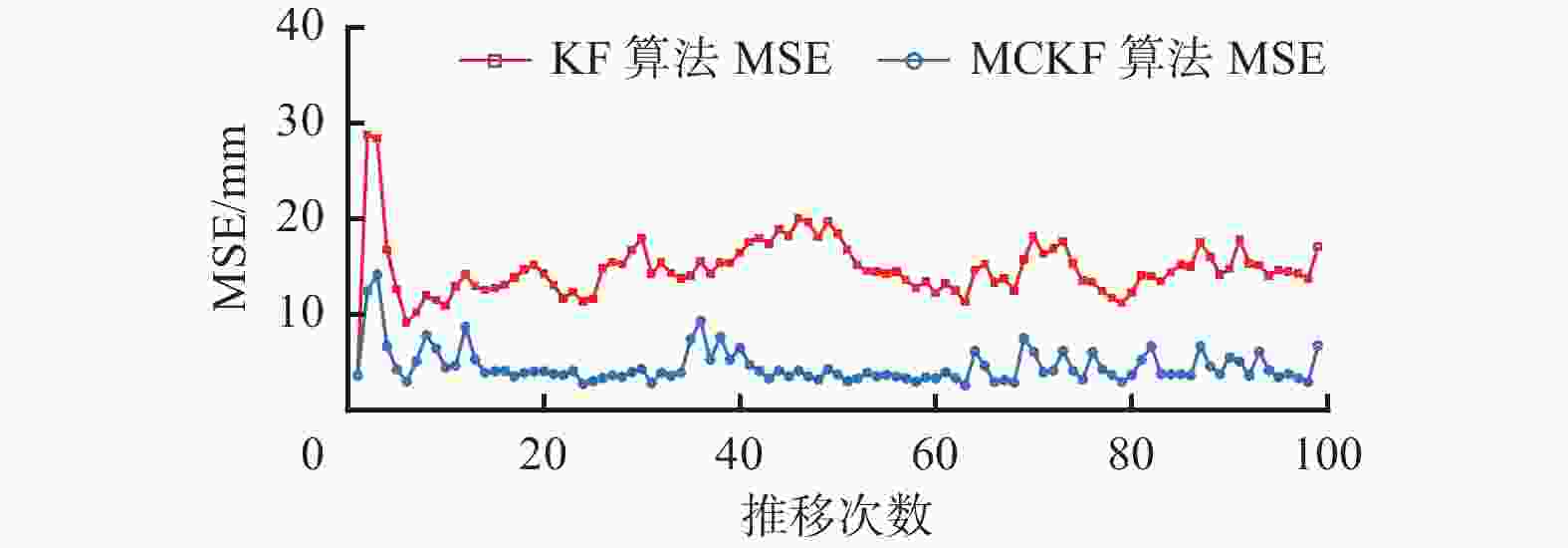
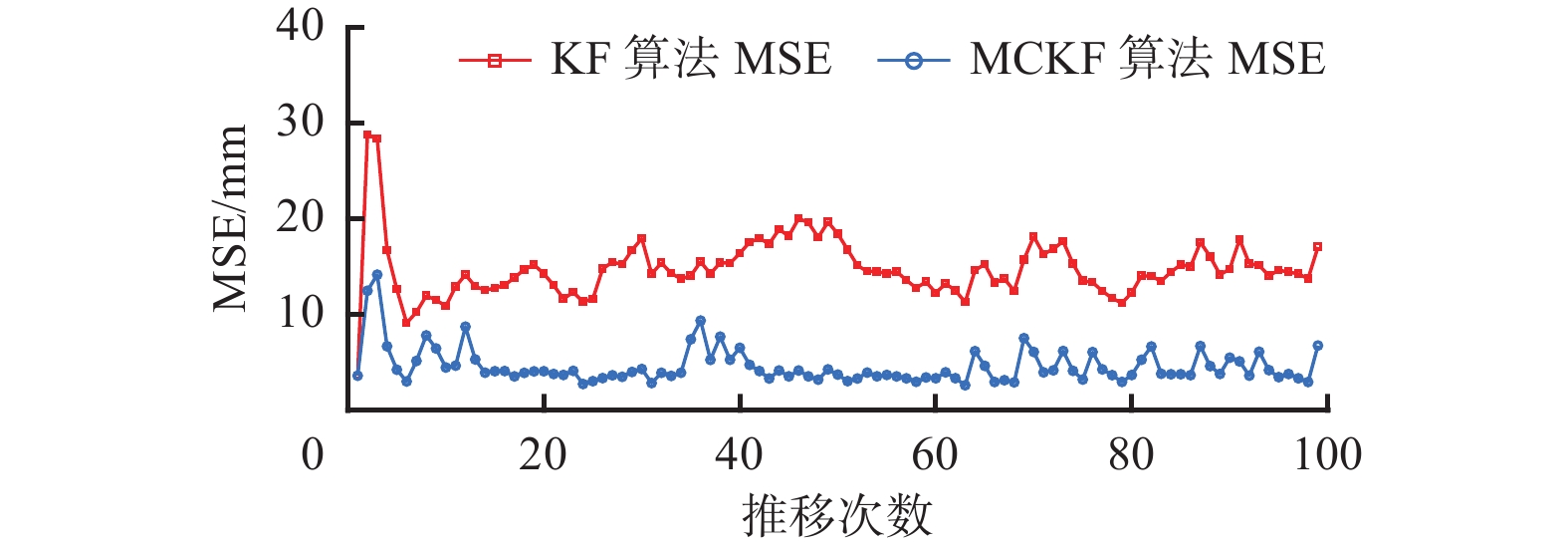
图 8 非高斯噪声条件下KF算法预测轨迹与MCKF算法预测轨迹的MSE
Figure 8. Mean square errors of prediction trajectory of KF algorithm and MCKF algorithm under condition of non-Gaussian noise
-
[1] 罗开成,常亚军,高有进. 综采工作面智能开采关键技术实践[J]. 煤炭科学技术,2020,48(7):73-79. doi: 10.13199/j.cnki.cst.2020.07.006LUO Kaicheng,CHANG Yajun,GAO Youjin. Key technology practice of intelligent mining in fully-mechanized coal mining face[J]. Coal Science and Technology,2020,48(7):73-79. doi: 10.13199/j.cnki.cst.2020.07.006 [2] 李首滨,李森,张守祥,等. 综采工作面智能感知与智能控制关键技术与应用[J]. 煤炭科学技术,2021,49(4):28-39. doi: 10.13199/j.cnki.cst.2021.04.004LI Shoubin,LI Sen,ZHANG Shouxiang,et al. Key technology and application of intelligent perception and intelligent control in fully mechanized mining face[J]. Coal Science and Technology,2021,49(4):28-39. doi: 10.13199/j.cnki.cst.2021.04.004 [3] 葛世荣,郝尚清,张世洪,等. 我国智能化采煤技术现状及待突破关键技术[J]. 煤炭科学技术,2020,48(7):28-46. doi: 10.13199/j.cnki.cst.2020.07.002GE Shirong,HAO Shangqing,ZHANG Shihong,et al. Status of intelligent coal mining technology and potential key technologies in China[J]. Coal Science and Technology,2020,48(7):28-46. doi: 10.13199/j.cnki.cst.2020.07.002 [4] 白晋铭,王然风,付翔. 基于架间行走机器人的液压支架直线度测量方法[J]. 工矿自动化,2019,45(1):45-51. doi: 10.13272/j.issn.1671-251x.2018060008BAI Jinming,WANG Ranfeng,FU Xiang. A straightness measurement method of hydraulic support based on inter supports walking robot[J]. Industry and Mine Automation,2019,45(1):45-51. doi: 10.13272/j.issn.1671-251x.2018060008 [5] 胡波,廉自生. 基于支持向量机和遗传算法的液压支架调直系统研究[J]. 煤矿机械,2014,35(10):39-41. doi: 10.13436/j.mkjx.201410019HU Bo,LIAN Zisheng. Study on hydraulic support straightening system based on support vector machine and genetic algorithm[J]. Coal Mine Machinery,2014,35(10):39-41. doi: 10.13436/j.mkjx.201410019 [6] 张旭辉,王冬曼,杨文娟. 基于视觉测量的液压支架位姿检测方法[J]. 工矿自动化,2019,45(3):56-60. doi: 10.13272/j.issn.1671-251x.2018090039ZHANG Xuhui,WANG Dongman,YANG Wenjuan. Position detection method of hydraulic support based on vision measurement[J]. Industry and Mine Automation,2019,45(3):56-60. doi: 10.13272/j.issn.1671-251x.2018090039 [7] 牛剑峰. 基于视频巡检的综采工作面无人化关键技术研究[J]. 煤炭科学技术,2019,47(10):141-146. doi: 10.13199/j.cnki.cst.2019.10.018NIU Jianfeng. Research on unmanned key technology of fully-mechanized mining face based on video inspection[J]. Coal Science and Technology,2019,47(10):141-146. doi: 10.13199/j.cnki.cst.2019.10.018 [8] 杨学军,王然风,王怀法. 液压支架直线度检测机器人激光定位矩阵研究[J]. 工矿自动化,2019,45(1):52-56. doi: 10.13272/j.issn.1671-251x.2018060035YANG Xuejun,WANG Ranfeng,WANG Huaifa. Research on laser positioning matrix of straightness detection robot for hydraulic support[J]. Industry and Mine Automation,2019,45(1):52-56. doi: 10.13272/j.issn.1671-251x.2018060035 [9] 张树楠,曹现刚,崔亚仲,等. 基于多传感器的液压支架直线度测量方法研究[J]. 煤矿机械,2020,41(4):56-59. doi: 10.13436/j.mkjx.202004019ZHANG Shunan,CAO Xiangang,CUI Yazhong,et al. Research on straightness measurement method of hydraulic support based on multi-sensor[J]. Coal Mine Machinery,2020,41(4):56-59. doi: 10.13436/j.mkjx.202004019 [10] 王宇卓,常宗旭,高飞,等. 液压支架的调直方法研究[J]. 机电工程,2021,38(5):645-649. doi: 10.3969/j.issn.1001-4551.2021.05.020WANG Yuzhuo,CHANG Zongxu,GAO Fei,et al. Study on the alignment method of hydraulic support[J]. Journal of Mechanical & Electrical Engineering,2021,38(5):645-649. doi: 10.3969/j.issn.1001-4551.2021.05.020 [11] 张帆,李闯,李昊. 智能综采工作面刮板输送机直线度监测方法研究[J]. 煤炭科学技术,2022,50(4):246-255. doi: 10.13199/j.cnki.cst.2020-0591ZHANG Fan,LI Chuang,LI Hao. Study on straightness monitoring method of scraper conveyor in intelligent fully-mechanized mining face[J]. Coal Science and Technology,2022,50(4):246-255. doi: 10.13199/j.cnki.cst.2020-0591 [12] 李志鹏,程兰,王志飞,等. 卡尔曼滤波框架下基于最大相关熵的移动机器人位姿估计[J]. 太原理工大学学报,2021,52(6):936-944. doi: 10.16355/j.cnki.issn1007-9432tyut.2021.06.012LI Zhipeng,CHENG Lan,WANG Zhifei,et al. Pose estimation of mobile robots based on maximum correntropy under Kalman filtering framework[J]. Journal of Taiyuan University of Technology,2021,52(6):936-944. doi: 10.16355/j.cnki.issn1007-9432tyut.2021.06.012 [13] CHEN Badong,LIU Xi,ZHAO Haiquan,et al. Maximum correntropy Kalman filter[J]. Automatica,2017,76:70-77. doi: 10.1016/j.automatica.2016.10.004 [14] 李松,唐小妹,孙鹏跃,等. GNSS/INS紧组合最大熵卡尔曼滤波算法[J]. 全球定位系统,2020,45(4):1-8. doi: 10.13442/j.gnss.1008-9268.2020.04.001LI Song,TANG Xiaomei,SUN Pengyue,et al. Maximum correntropy Kalman filter for GNSS/INS tightly-coupled integration[J]. GNSS World of China,2020,45(4):1-8. doi: 10.13442/j.gnss.1008-9268.2020.04.001 [15] 龙子旋,周琪,彭侠夫,等. 非高斯环境下船变测量最大熵卡尔曼滤波方法[J]. 系统工程与电子技术,2021,43(11):3278-3287. doi: 10.12305/j.issn.1001-506X.2021.11.28LONG Zixuan,ZHOU Qi,PENG Xiafu,et al. Maximum correntropy Kalman filter used for hull deformation measurement in non-Gaussian environment[J]. Systems Engineering and Electronics,2021,43(11):3278-3287. doi: 10.12305/j.issn.1001-506X.2021.11.28 -

 下载:
下载:


 点击查看大图
点击查看大图
计量
- 文章访问数: 102
- HTML全文浏览量: 17
- PDF下载量: 14
- 被引次数: 0
