

Research on the intelligent management system of the trackless rubber-tyred vehicles in the coal mine
-
摘要: 针对煤矿井下工作地点分散、运输路线复杂、巷道内弯道和交叉路口较多的特点与煤矿智能化建设的需要,从需求分析、系统架构、关键技术等方面对矿井无轨胶轮车智能化管理系统进行了研究。通过需求分析,得出矿井无轨胶轮车智能化管理系统需具有矿井车辆精准定位、矿井车辆工况信息实时采集、矿井车辆移动通信、矿井车辆智能导航、矿井车辆状态实时监测与控制、矿井车辆防碰撞预警等功能。对系统关键技术进行了详细介绍:分析了UWB定位技术在矿井无轨胶轮车定位中的应用;提出矿井车辆移动通信技术宜采用WiFi与4G/5G技术;讨论了常用路径规划技术的特点,得出矿井无轨胶轮车导航技术宜采用成熟度较高的基于图搜索的路径规划算法,矿井无轨胶轮车导航和轨迹回放技术应与GIS技术相结合;研究了矿井车辆红绿灯控制技术,提出了十字交叉口模型和单车通行巷模型;研究了车辆防碰撞预警技术,根据行人和车辆位置及其与UWB基站的相对方向和距离,分析了同基站与跨基站2种模式下的防碰撞预警原理。实验结果表明,基于UWB的矿井车辆通信、基于A*算法的矿井车辆路径规划及轨迹回放、红绿灯控制、防碰撞预警等功能均能满足应用需求。Abstract: In the coal mine, underground working places are scattered, transportation routes are complex, and there are many bends and intersections in the roadway. Based on the above characteristics and the needs of intelligent construction of coal mines, the intelligent management system of trackless rubber-tyred vehicles in coal mines is studied from the aspects of demand analysis, system architecture and key technologies. Through demand analysis, it is concluded that the intelligent management system of mine trackless rubber-tyred vehicles should have the functions of precise positioning of mine vehicles, real-time collection of mine vehicle working conditions information, mine vehicle mobile communication, mine vehicle intelligent navigation, real-time monitoring and control of mine vehicle status and mine vehicle anti-collision warning. The key technologies of the system are introduced in detail. The application of UWB positioning technology in mine trackless rubber-tyred vehicle positioning is analyzed. It is suggested that the mobile communication technology of mine vehicles should adopt WiFi and 4G/5G technology. The characteristics of common path-planning technology are discussed. It is concluded that the mine trackless rubber-tyred vehicle navigation technology should adopt the path planning algorithm based on graph search with high maturity. The mine trackless rubber-tyred vehicle navigation and track playback technology should be combined with GIS technology. The traffic light control technology of mine vehicles is studied. The intersection model and single-vehicle passing lane model are proposed. The vehicle anti-collision warning technology is studied. According to the position of pedestrians and vehicles and the relative direction and distance between them and the UWB base station, the anti-collision early warning principle under the two modes of the same base station and the cross-base station is analyzed. The experimental results show that the mine vehicle communication based on UWB, mine vehicle path planning and vehicle track playback based on A* algorithm, traffic light control, anti-collision early warning and other functions can meet the application requirements.
-

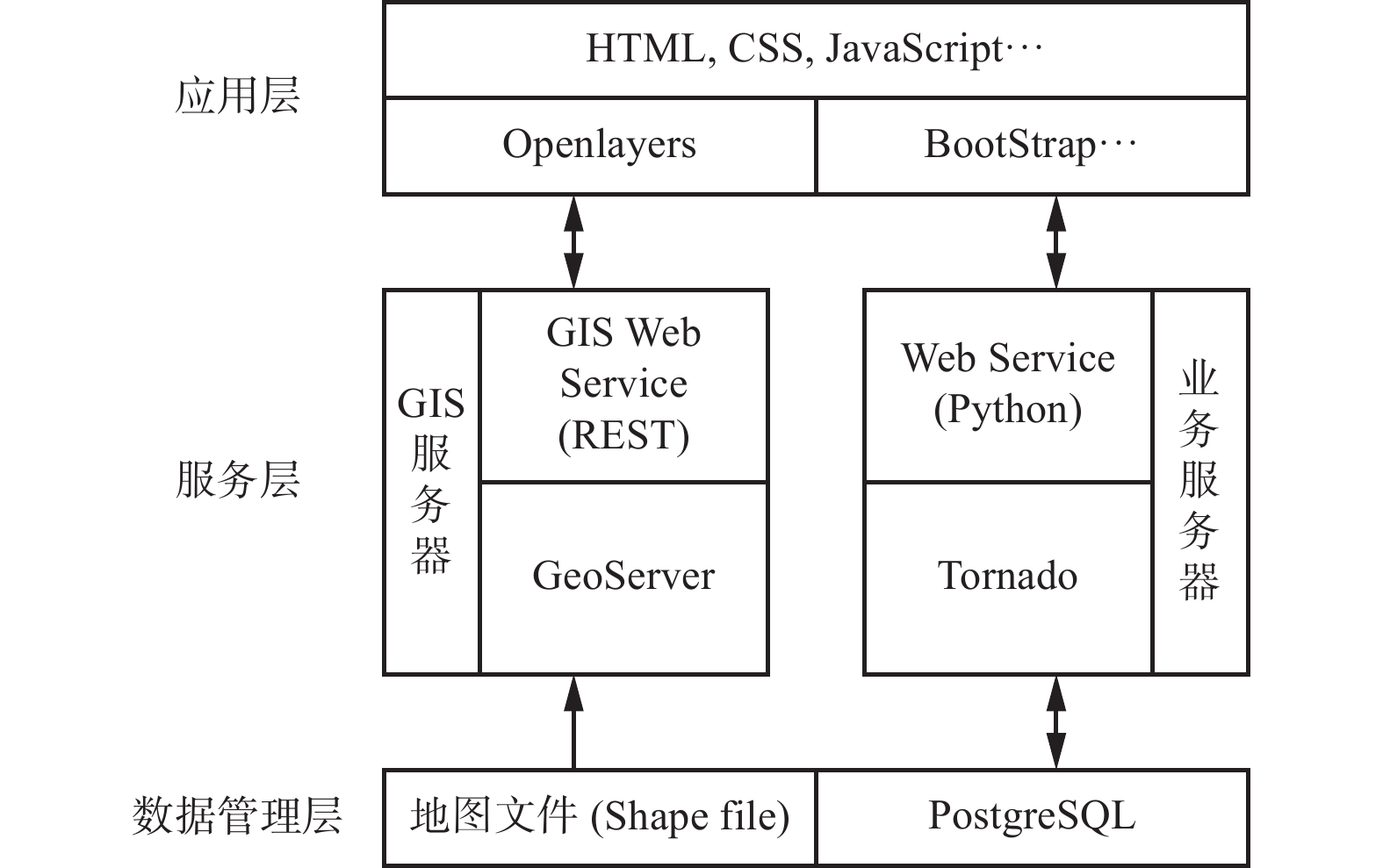
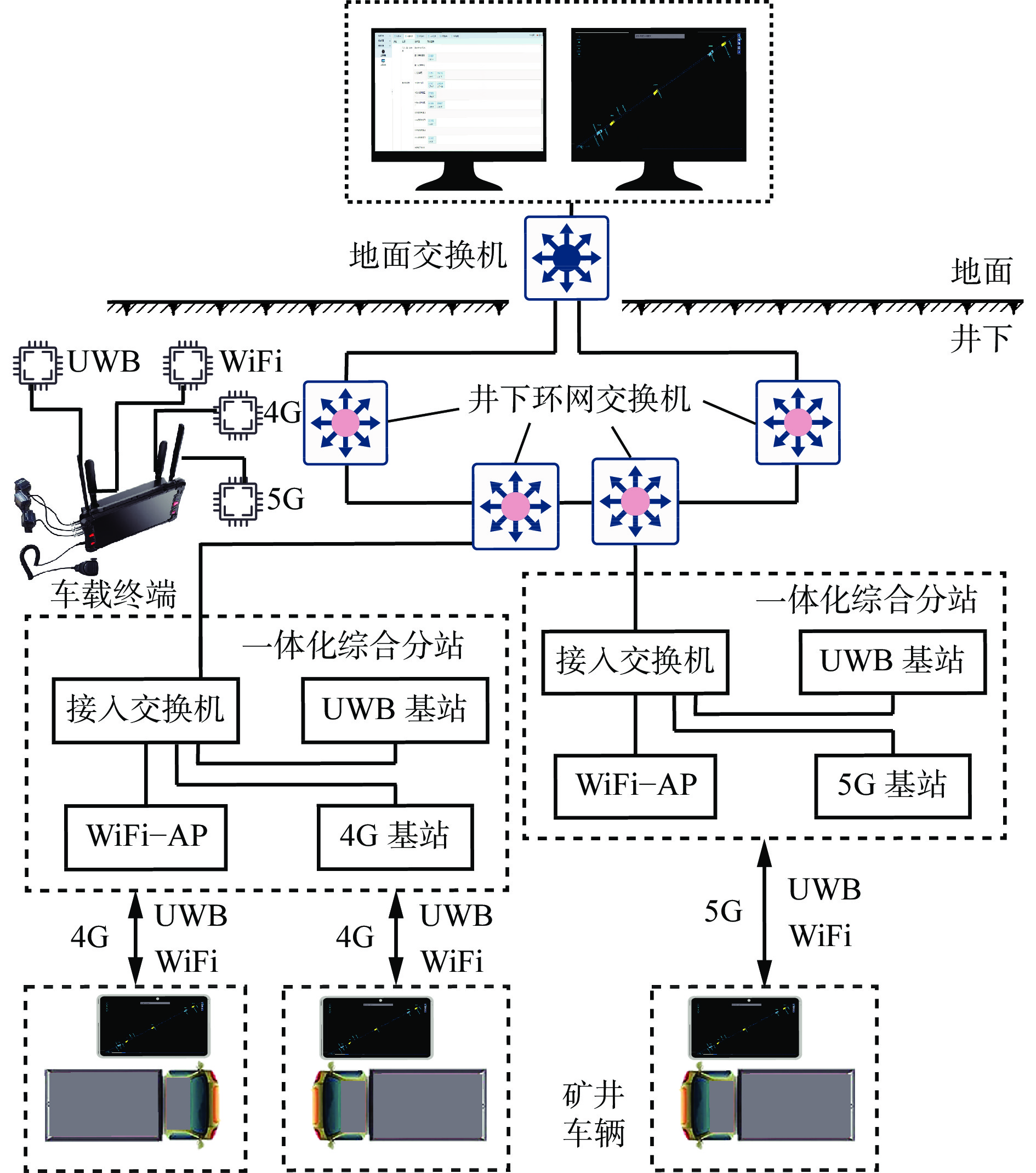
图 1 矿井无轨胶轮车智能化管理系统架构
Figure 1. Architecture of intelligent management system of mine trackless rubber-tyred vehicle

图 2 基于TW−TOF的测距原理
Figure 2. Distance measuring principle based on two way-time of flight
表 1 常用路径规划算法优缺点
Table 1. Advantages and disadvantages of common path planning algorithms
分类 算法 原理 优点 缺点 基于图搜索的
路径规划算法Dijkstra算法 将路径网络中节点分为已分配节点组与未分配节点组,
并按照递增顺序生成一条最短路径路径短 无连续曲率 A*算法 与Dijkstra算法相比,该算法在引入新节点时,将已分配
节点的信息引入评价标准,提高搜索效率速度快 无连续曲率 基于采样的
路径规划算法概率路线图法 确定起始位置和目标位置后,根据训练好的离线阶段路
线图,使用启发式路径搜索算法确定一条可行路径速度快,
适合复杂场景无连续曲率 快速搜索
随机树法首先构建环境地图规划空间,然后将规划空间的起点作
为根节点,逐渐增加叶节点,生成随机扩展树,当随机扩
展树的叶节点到达目标节点所在区域时结束适合复杂场景 需进行优化 智能仿生算法 遗传算法 通过不同编码方式、变异算子及交叉算子的组合,模拟
自然进化过程,搜索路径的最优解空间适应能力强 计算成本高 蚁群优化算法 基于蚁群行为表现出的信息正反馈现象,生成一条初始
节点到目标节点的最短路径鲁棒性强 收敛速度慢  下载: 导出CSV
下载: 导出CSV
表 2 矿井车辆定位实验数据
Table 2. Experimental data of mine vehicle positioning
m 实验
类型基站
位置实际位置 测量位置 误差 静态
测量3206运输巷绕道口 +200 +200.20 0.20 3号永久避难硐室口 +150 +149.90 0.10 3306回风巷绕道口 +50 +50.25 0.25 动态
测量3206运输巷绕道口 +230 +235.25 5.25 3号永久避难硐室口 +180 +175.30 4.70 3306回风巷绕道口 +80 +86.80 6.80
下载: 导出CSV
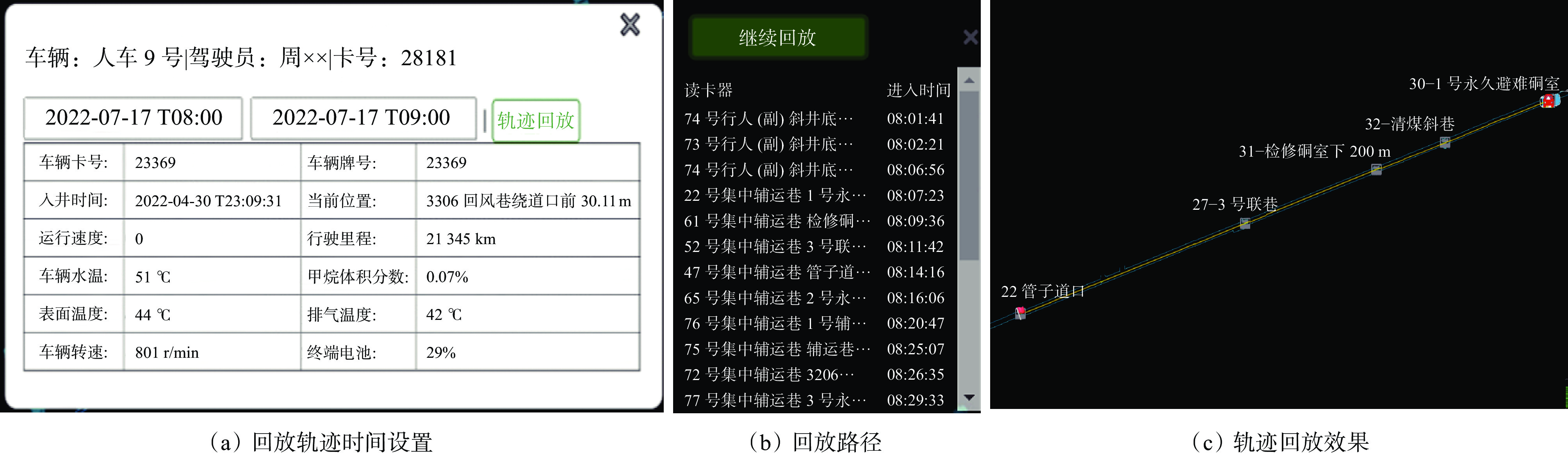
表 3 路径信息对比
Table 3. Comparison of path information
路径
类型起始
位置目标
位置路径信息 导航
路径清煤斜巷 3号永久避难硐室 清煤斜巷→检修硐室下200 m→3号联巷→3号联巷下150 m→管子道口→2号永久避难硐室→1号辅助水仓口→辅助巷配电点→3206运输巷绕道口→3号永久避难硐室 实际
路径清煤斜巷 3号永久避难硐室 清煤斜巷→检修硐室下200 m→3号联巷→3号联巷下150 m→管子道口→2号永久避难硐室→1号辅助水仓口→辅助巷配电点→3206运输巷绕道口→3号永久避难硐室
下载: 导出CSV
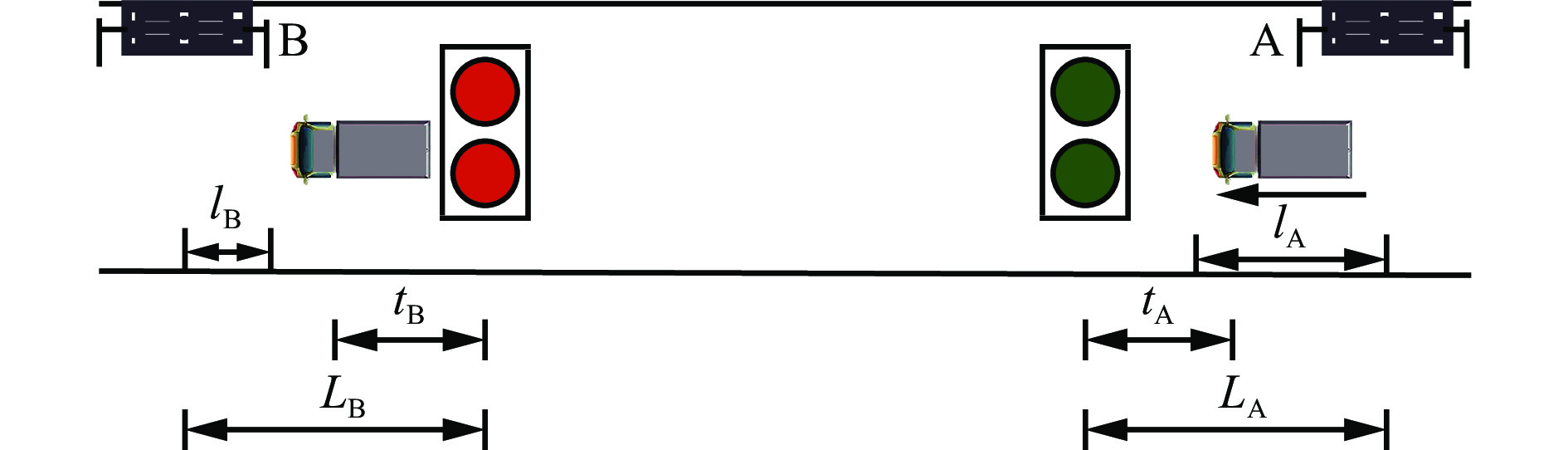
表 4 单车通行巷实验数据
Table 4. Experimental data of single vehicle passing lane
行驶方向 基站 车辆位置/m HA状态 HB状态 基站A→基站B A −180 绿 绿 −195 绿 红 B 192 绿 红 175 绿 绿 基站B→基站A B 180 绿 绿 195 红 绿 A −195 红 绿 −185 绿 绿
下载: 导出CSV
表 5 防碰撞预警实验数据
Table 5. Data sheet of anti-collision early warning experiment
实验
类型预警
类型车辆
位置/m行人或
车辆位置/m是否
预警同基站 行人与车辆 +200 +225 是 +20 −8 是 +200 +232 否 车辆
之间+180 +135 是 +200 +266 否 +30 −14 是 跨基站 行人与车辆 +390 −385 是 +380 −385 否 +395 −380 是 车辆
之间+380 −378 是 +390 −350 否 +380 −375 是
下载: 导出CSV
-
[1] 王国法,赵国瑞,任怀伟. 智慧煤矿与智能化开采关键核心技术分析[J]. 煤炭学报,2019,44(1):34-41. doi: 10.13225/j.cnki.jccs.2018.5034WANG Guofa,ZHAO Guorui,REN Huaiwei. Analysis on key technologies of intelligent coal mine and intelligent mining[J]. Journal of China Coal Society,2019,44(1):34-41. doi: 10.13225/j.cnki.jccs.2018.5034 [2] 孙继平,江嬴. 矿井车辆无人驾驶关键技术研究[J]. 工矿自动化,2022,48(5):1-5,31.SUN Jiping,JIANG Ying. Research on key technologies of mine unmanned vehicle[J]. Journal of Mine Automation,2022,48(5):1-5,31. [3] 王国法,杜毅博. 煤矿智能化标准体系框架与建设思路[J]. 煤炭科学技术,2020,48(1):1-9. doi: 10.13199/j.cnki.cst.2020.01.001WANG Guofa,DU Yibo. Coal mine intelligent standard system framework and construction ideas[J]. Coal Science and Technology,2020,48(1):1-9. doi: 10.13199/j.cnki.cst.2020.01.001 [4] 王国法,杜毅博. 智慧煤矿与智能化开采技术的发展方向[J]. 煤炭科学技术,2019,47(1):1-10. doi: 10.13199/j.cnki.cst.2019.01.001WANG Guofa,DU Yibo. Development direction of intelligent coal mine and intelligent mining technology[J]. Coal Science and Technology,2019,47(1):1-10. doi: 10.13199/j.cnki.cst.2019.01.001 [5] 翟昆志. 矿用防爆胶轮车调度管理系统在白芨沟井的应用[J]. 神华科技,2015,13(1):40-42,46. doi: 10.3969/j.issn.1674-8492.2015.01.012ZHAI Kunzhi. Application of mine explosion-proof rubber-tyred vehicle scheduling management system in Baijigou Well[J]. Shenhua Science and Technology,2015,13(1):40-42,46. doi: 10.3969/j.issn.1674-8492.2015.01.012 [6] 郭海军,续芳. 煤矿无轨胶轮车监控调度系统设计[J]. 工矿自动化,2013,39(4):9-12. doi: 10.7526/j.issn.1671-251X.2013.04.003GUO Haijun,XU Fang. Design of monitoring and dispatching system of trackless rubber-tyred locomotive in coal mine[J]. Industry and Mine Automation,2013,39(4):9-12. doi: 10.7526/j.issn.1671-251X.2013.04.003 [7] 周斌. 融合无线定位技术的井下车辆管理系统设计[J]. 煤矿机械,2018,39(9):1-4. doi: 10.13436/j.mkjx.201809001ZHOU Bin. Design of mine vehicle management system based on wireless positioning technology[J]. Coal Mine Machinery,2018,39(9):1-4. doi: 10.13436/j.mkjx.201809001 [8] 杨海宏. 辅助运输车辆信息化管理系统设计[J]. 煤炭科学技术,2015,43(增刊2):124-127.YANG Haihong. Design on auxiliary transportation vehicle information management system[J]. Coal Science and Technology,2015,43(S2):124-127. [9] 包翔宇,单成伟,吴岩明. 基于UWB精确定位的辅助运输交通灯自动控制系统[J]. 工矿自动化,2022,48(6):100-111.BAO Xiangyu,SHAN Chengwei,WU Yanming. Automatic control system of auxiliary transportation traffic light based on UWB precise positioning[J]. Journal of Mine Automation,2022,48(6):100-111. [10] 朱晓民. 基于UWB及语义地图的室内移动机器人定位与路径规划关键技术研究[D]. 上海: 华东理工大学, 2020.ZHU Xiaomin. Research on key techniques in positioning and path planning of indoor mobile robots based on UWB and semantic map[D]. Shanghai: East China University of Science and Technology, 2020. [11] 贺磊,魏明生,仇欣宇,等. 基于UWB的井下人员定位算法研究[J]. 工矿自动化,2022,48(6):134-138.HE Lei,WEI Mingsheng,QIU Xinyu,et al. Research on positioning algorithm of underground personnel based on UWB[J]. Journal of Mine Automation,2022,48(6):134-138. [12] 王飞. 基于UWB技术的矿井精确定位系统[J]. 煤矿安全,2021,52(7):99-102. doi: 10.13347/j.cnki.mkaq.2021.07.017WANG Fei. Accurate positioning system for mine based on UWB technology[J]. Safety in Coal Mines,2021,52(7):99-102. doi: 10.13347/j.cnki.mkaq.2021.07.017 [13] 王磊. 浅谈4G无线通信技术在煤矿生产中的应用[J]. 煤,2019,28(8):106-108. doi: 10.3969/j.issn.1005-2798.2019.08.044WANG Lei. Discussion on application of 4G wireless communication technology in coal mine production[J]. Coal,2019,28(8):106-108. doi: 10.3969/j.issn.1005-2798.2019.08.044 [14] 张临炜. 基于WebGIS的遥感大数据信息管理与可视化分析[D]. 桂林: 桂林理工大学, 2018.ZHANG Linwei. Management and visualization of remote sensing big data information based on WebGIS[D]. Guilin: Guilin University of Technology, 2018. [15] 张楠西. 基于WebGIS的无人机海事监管系统的设计与实现[D]. 北京: 北京工业大学, 2018.ZHANG Nanxi. Design and implementation of UAV maritime regulation system based on WebGIS[D]. Beijing: Beijing University of Technology, 2018. [16] 周相坡,周依尔,徐立军,等. 一种基于概率路线图的月球巡航车路径规划算法[J]. 空间控制技术与应用,2020,46(6):43-49,78.ZHOU Xiangpo,ZHOU Yi'er,XU Lijun,et al. A path planning algorithm for lunar cover based on probabilistic roadmap[J]. Aerospace Control and Application,2020,46(6):43-49,78. [17] 徐联杰,刘检华,何永熹,等. 一种基于改进快速搜索随机树算法的管路自动布局方法[J]. 图学学报,2016,37(1):1-10. doi: 10.11996/JG.j.2095-302X.2016010001XU Lianjie,LIU Jianhua,HE Yongxi,et al. A method for pipe auto layout based improved RRT algorithm[J]. Journal of Graphics,2016,37(1):1-10. doi: 10.11996/JG.j.2095-302X.2016010001 [18] 于佳乔,李岩. 基于改进遗传算法的自动导航小车路径规划调度[J]. 机床与液压,2022,50(5):16-20. doi: 10.3969/j.issn.1001-3881.2022.05.004YU Jiaqiao,LI Yan. Research on AGV path planning based on improved genetic algorithm[J]. Machine Tool & Hydraulics,2022,50(5):16-20. doi: 10.3969/j.issn.1001-3881.2022.05.004 [19] 李海洋. 基于GIS的京津冀协同应急物流管理系统研究[D]. 廊坊: 防灾科技学院, 2021.LI Haiyang. Study on collaborative emergency logistics management system of Beijing-Tianjin-Hebei region based on GIS[D]. Langfang: Institute of Disaster Prevention, 2021. -





 点击查看大图
点击查看大图
计量
- 文章访问数: 358
- HTML全文浏览量: 86
- PDF下载量: 72
- 被引次数: 0
