

Simulation system of mine unmanned vehicle based on parallel control theory
-
摘要: 针对矿用车辆实车测试无人驾驶存在危险性大、测试时间长、测试成本高、测试内容覆盖面窄等问题,研究了基于平行控制理论的矿区无人驾驶卡车仿真系统。该系统采用矿用卡车动力学建模、高保真场景重构、虚拟传感器建模等关键技术,实现无人驾驶算法全面推演、系统集成可靠性测试、矿区生产预测模拟、虚实互动平行推演等功能。矿用卡车动力学建模主要步骤分为整车模型搭建与可视化场景创建2个部分,将车辆动力学模型与虚拟场景关联,利用车辆模型产生的仿真数据实时驱动虚拟场景中的车辆运动。针对大型露天矿场景复杂、不规则的特性,通过无人机航拍测绘、激光雷达三维扫描等手段,获取矿山高精度三维模型数据,基于虚拟微多边形几何体技术、高像素虚拟纹理技术、三维场景实时渲染技术,构建高保真虚拟三维场景。虚拟传感器主要包括虚拟激光雷达、虚拟毫米波雷达、虚拟惯导装置、虚拟视觉相机,搭载于虚拟矿车上,负责生成虚拟场景中的数据信息,并将数据发送到自动驾驶控制器进行处理。基于该仿真系统,可以进行单车测试、多车调度测试、智能调度算法测试,还可以对现场车辆和虚拟车辆的虚实互动进行测试,为整个矿区的稳定运输、复杂路口的推演模拟、智能调度算法的最优决策提供验证平台,确保无人驾驶测试效率和安全,加快矿区无人驾驶技术升级。Abstract: The test of mine unmanned vehicle has problems of great danger, long test time, high test cost and narrow test coverage. In order to solve the above problems, the simulation system of unmanned mine vehicle based on parallel control theory is studied. The system adopts key technologies such as mine vehicle dynamics modeling, high-fidelity scene reconstruction, and virtual sensor modeling. The system realizes the functions of comprehensive deduction of the unmanned driving algorithm, system integration reliability test, mining area production prediction simulation, and virtual and actual interactive parallel deduction. The main step of dynamic modeling of the mine vehicle is divided into two parts: vehicle model building and visual scene creation. The vehicle dynamic model is associated with the virtual scene. The simulation data generated by the vehicle model is used for driving the vehicle in the virtual scene to move in real-time. In view of the complex and irregular characteristics of the large-scale open-pit mine scene, the high-precision 3D model data of the mine is obtained by means of UAV aerial mapping and laser radar 3D scanning. Based on the virtual micro polygon geometry technology, high pixel virtual texture technology, and 3D scene real-time rendering technology, a high-fidelity virtual 3D scene is constructed. The virtual sensor mainly comprises virtual laser radar, virtual millimeter wave radar, virtual inertial navigation device and virtual vision camera. The virtual sensor is carried on the virtual mine car. It is responsible for generating virtual data information in a simulated mining area scene, and sending the data to the automatic driving controller for processing. Based on the simulation system, single-vehicle test, multi-vehicle scheduling test and intelligent scheduling algorithm test can be carried out. The dynamic virtual-reality interaction between on-site vehicles and virtual vehicles can be tested. The system is used to provide a verification platform for stable transportation of the whole mining area, deduction simulation of complex intersections and optimal decision of intelligent scheduling algorithm. The system ensures the efficiency and safety of unmanned driving test and accelerates the upgrading of unmanned driving technology in the mining area.
-
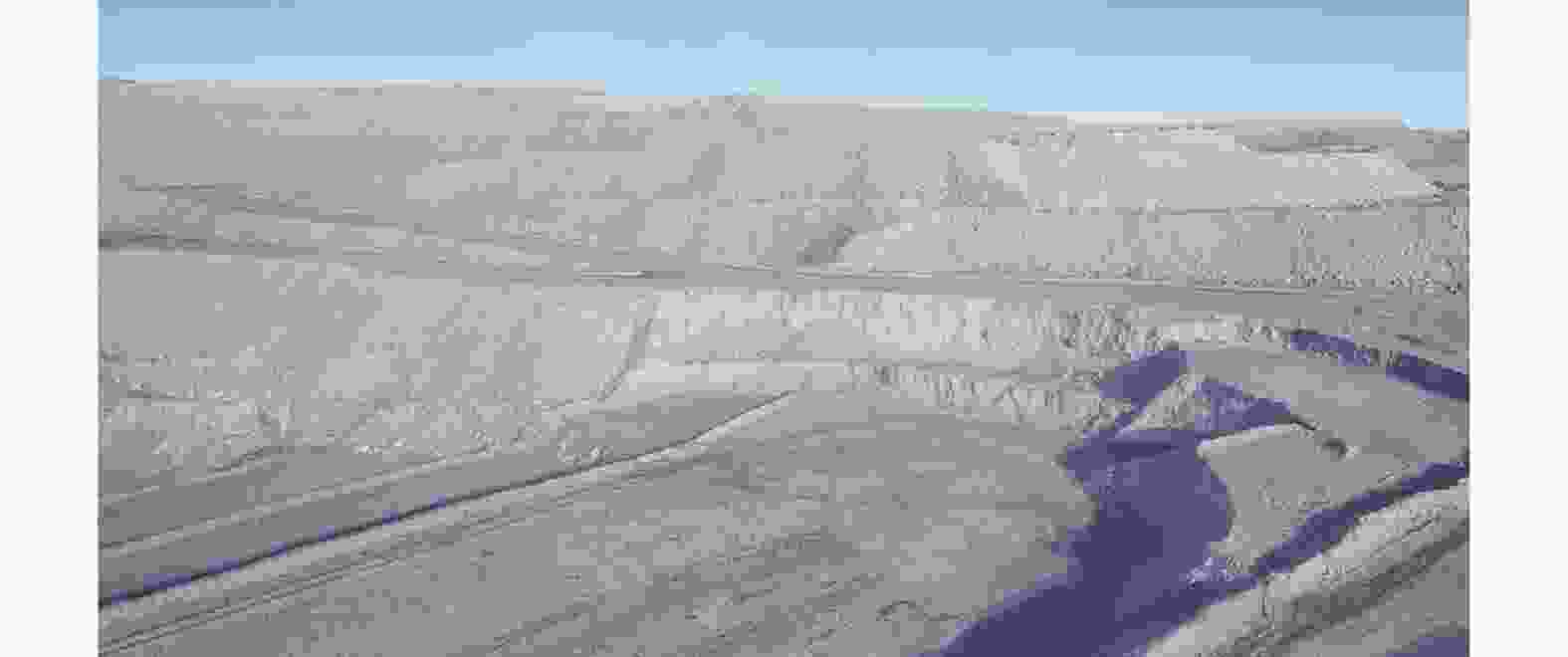
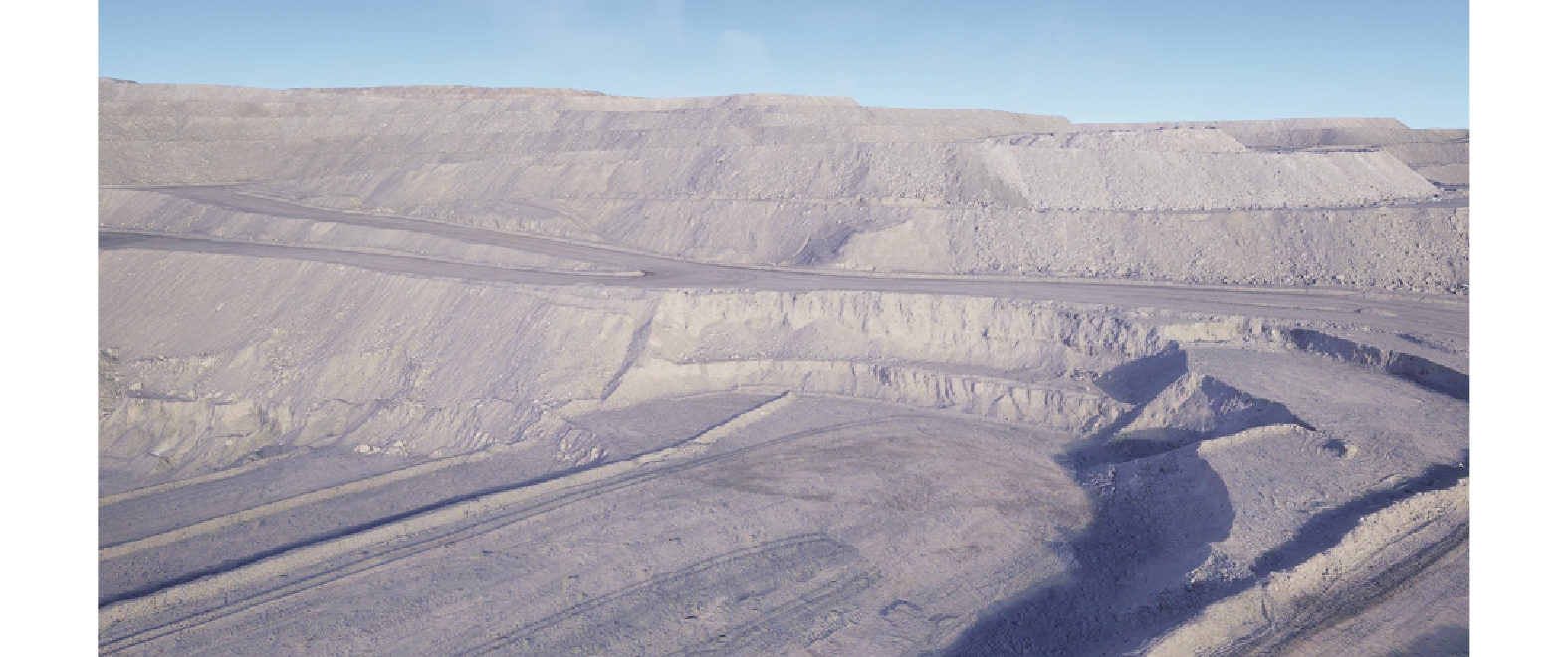
图 1 高保真虚拟矿山重构渲染效果
Figure 1. Reconstruction rendering effect of high fidelity virtual mine
-
[1] 杨超,高玉,艾云峰,等. 端对端平行无人矿山系统及其关键技术[J]. 智能科学与技术学报,2019,1(3):228-240. doi: 10.11959/j.issn.2096-6652.201929YANG Chao,GAO Yu,AI Yunfeng,et al. End-to-end parallel autonomous mining systems and key technologies[J]. Chinese Journal of Intelligent Science and Technology,2019,1(3):228-240. doi: 10.11959/j.issn.2096-6652.201929 [2] 陈龙,王晓,杨健健,等. 平行矿山:从数字孪生到矿山智能[J]. 自动化学报,2021,47(7):1633-1645. doi: 10.16383/j.aas.2021.y000001CHEN Long,WANG Xiao,YANG Jianjian,et al. Parallel mining operating systems:from digital twins to mining intelligence[J]. Acta Automatica Sinica,2021,47(7):1633-1645. doi: 10.16383/j.aas.2021.y000001 [3] 王国法,任怀伟,庞义辉,等. 煤矿智能化(初级阶段)技术体系研究与工程进展[J]. 煤炭科学技术,2020,48(7):1-27. doi: 10.13199/j.cnki.cst.2020.07.001WANG Guofa,REN Huaiwei,PANG Yihui,et al. Research and engineering progress of intelligent coal mine technical system in early stages[J]. Coal Science and Technology,2020,48(7):1-27. doi: 10.13199/j.cnki.cst.2020.07.001 [4] PAZOOKI A,RAKHEJA S,CAO Dongpu. Kineto-dynamic directional response analysis of an articulated frame steer vehicle[J]. International Journal of Vehicle Design,2014,65(1):1-30. doi: 10.1504/IJVD.2014.060063 [5] HE Y,KHAJEPOUR A,MCPHEE J,et al. Dynamic modelling and stability analysis of articulated frame steer vehicles[J]. International Journal of Heavy Vehicle Systems,2005,12(1):28-59. doi: 10.1504/IJHVS.2005.005668 [6] DAHER N,IVANTYSYNOVA M. Yaw stability control of articulated frame off-highway vehicles via displacement controlled steer-by-wire[J]. Control Engineering Practice,2015,45:46-53. doi: 10.1016/j.conengprac.2015.08.011 [7] PAZOOKI A. Ride and directional dynamic analysis of articulated frame steer vehicles[D]. Montreal: Concordia University, 2012. [8] 王果,蒋瑞波,肖海红,等. 基于无人机倾斜摄影的露天矿边坡三维重建[J]. 中国矿业,2017,26(4):158-161. doi: 10.3969/j.issn.1004-4051.2017.04.031WANG Guo,JIANG Ruibo,XIAO Haihong,et al. Research on slope reconstruction technique based on UAV oblique photogrammetry[J]. China Mining Magazine,2017,26(4):158-161. doi: 10.3969/j.issn.1004-4051.2017.04.031 [9] 郭宝宇,张作昌,董希彬. 基于倾斜摄影的矿区三维场景建模及Web平台构建[J]. 现代测绘,2020,43(5):38-43. doi: 10.3969/j.issn.1672-4097.2020.05.012GUO Baoyu,ZHANG Zuochang,DONG Xibin. 3D scene modeling research and realization of coal mine area based on oblique photogrammetry[J]. Modern Surveying and Mapping,2020,43(5):38-43. doi: 10.3969/j.issn.1672-4097.2020.05.012 [10] 易翔,王蔚然. 激光雷达系统仿真软件设计与实现[J]. 激光与红外,2003(3):178-180. doi: 10.3969/j.issn.1001-5078.2003.03.005YI Xiang,WANG Weiran. Design and implementation of simulation software for lidar system[J]. Laser & Infrared,2003(3):178-180. doi: 10.3969/j.issn.1001-5078.2003.03.005 [11] FANG Jin,ZHOU Dingfu,YAN Feilong,et al. Augmented LiDAR simulator for autonomous driving[J]. IEEE Robotics and Automation Letters,2020,5(2):1931-1938. doi: 10.1109/LRA.2020.2969927 [12] 谭颖,谭长睿,向翼林. 基于Unity3D与HTC VIVE的虚拟现实驾考训练设计与实现[J]. 中国高新科技,2020(7):49-50.TAN Ying,TAN Changrui,XIANG Yilin. Design and implementation of virtual reality driving test training based on Unity3D and HTC VIVE[J]. China High and New Technology,2020(7):49-50. [13] 赵晓松. 基于Untiy3D的可视化虚拟仿真实验平台的设计与开发[D]. 西安: 西安电子科技大学, 2017.ZHAO Xiaosong. Design and development of visual virtual simulation experiment platform based on Unity3D[D]. Xi'an: Xidian University, 2017. [14] 李晨. 汽车驾驶模拟训练系统设计的研究[D]. 广州: 华南理工大学, 2016.LI Chen. The research of the automobile driving training simulator system design[D]. Guangzhou: South China University of Technology, 2016. -

 下载:
下载:

 点击查看大图
点击查看大图
图(4)
计量
- 文章访问数: 208
- HTML全文浏览量: 33
- PDF下载量: 49
- 被引次数: 0
