0 引言
对煤矿井下巷道环境及设备运行状态进行巡检,是煤矿企业安全生产的重要保证[1]。传统的巡检方式有人工巡检和在线监控2种。人工巡检方式由于劳动强度大、巡检效率低而逐渐被淘汰;在线监控方式存在投入成本高、维护效率低、覆盖面积小等问题[2]。近年来,随着机器人技术的高速发展,国内许多学者和科研人员开始研制应用于煤矿巡检领域的特种机器人[3]。许旺等[4]设计了轮式移动巡检机器人,通过机器人平台上的监测设备,实现工作面设备安全状态巡检。左敏[5]提出了一种集成化履带式矿山智能巡检机器人,在该机器人上安装摄像机,实现对矿山的安全监控。以上2种巡检机器人分别为轮式和履带式,应用于煤矿巷道巡检时,受限于复杂的地理环境和人员设备分布,控制较复杂。陆文涛等[6]针对煤矿井下带式输送机运行状态监测,设计了一种巡检机器人,通过固定抱索器与钢丝绳相连,在传动系统作用下沿带式输送机运行方向往返运动,实现状态巡检。该种机器人解决了行走问题,但巡检覆盖范围有限。裴文良等[7]针对煤矿井下水泵房等重要设备的巡检监控,设计了一种轨道式矿用防爆巡检机器人,通过在预设轨道上行走完成巡检任务,但将该种机器人应用于煤矿巷道中时,需专门铺设大量固定轨道,成本高,且占用巷道空间资源,不具有普适性。
笔者借鉴广泛应用于电力行业的悬线巡检机器人[8-10],结合煤矿井下巷道结构,设计了一种适用于煤矿巷道的悬线巡检机器人。该巡检机器人采用双臂轮式机械结构,通过机构间相互配合完成悬线杆过障及行走,极大地简化了机器人控制系统的设计。与轮式、履带式巡检机器人相比,该机器人的最大优势在于不受井下巷道复杂地理环境和人员及设备分布的影响,可极大地提高巡检可靠性;与轨道式巡检机器人相比,该机器人成本低、效率高。本文着重介绍该煤矿巷道悬线巡检机器人(以下简称巡检机器人)的结构设计,并对其在不同运动状态下进行仿真分析,从而验证结构设计的合理性。
1 巡检机器人设计要求
煤矿巷道工作环境特殊,不仅有瓦斯等易燃易爆气体、硫化氢等腐蚀性气体,而且空气潮湿、空间狭小、矿尘大、电磁干扰严重[11]。煤矿巷道错综复杂,采掘巷道、运输巷道、通风巷道等交错分布,且大多距离长、坡度大[12]。巷道侧顶壁空间开阔,可预先在其一侧架设悬线杆,铺设钢丝绳,形成巡检机器人巡检轨道,如图1所示。巡检机器人通过在悬线钢丝绳轨道上行走,完成井下巷道环境及设备运行状态巡检。
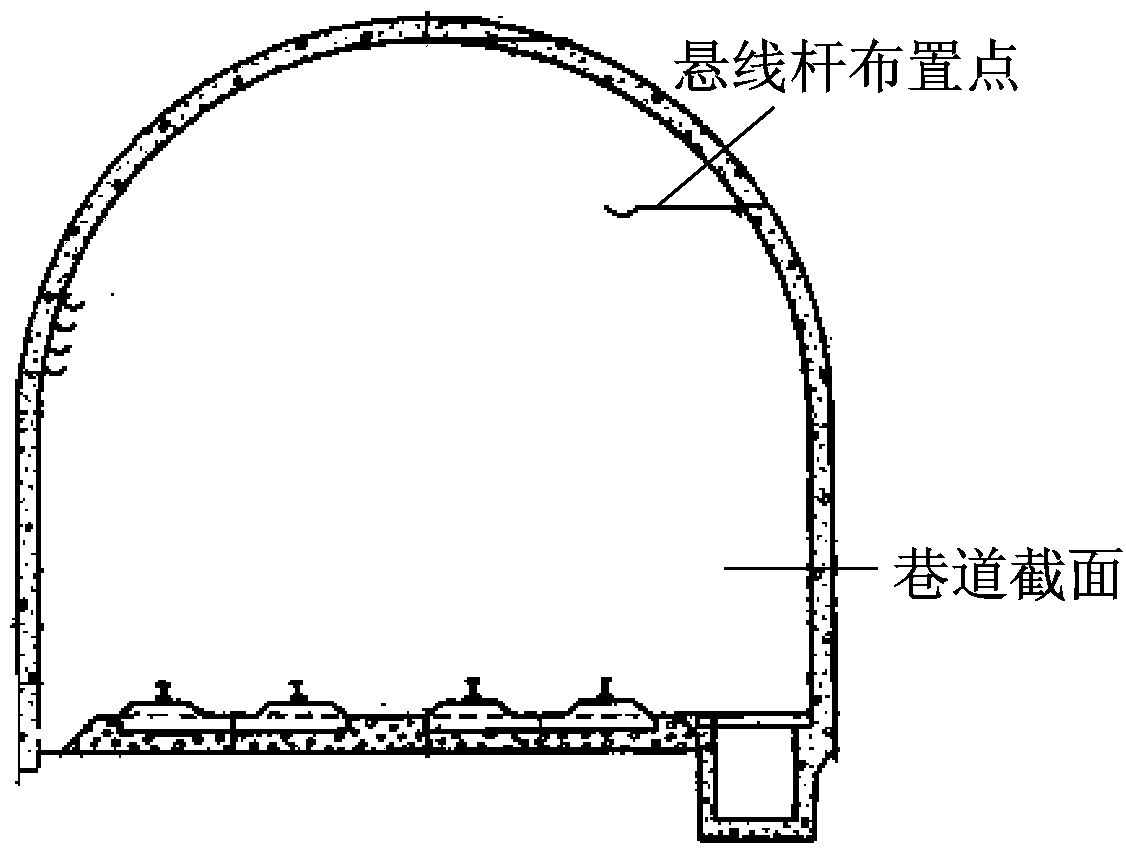
图1 煤矿巷道截面悬线杆布置
Fig.1 Suspension line bar layout in tunnel section of coal mine
为满足巡检需求,对巡检机器人提出以下设计要求:需满足强度要求,结构紧凑,轻量化;需配备模块搭载平台搭载巡检设备,能提供较大空间,实现设备安装;为避免巡检机器人在悬线钢丝绳轨道上行走时出现打滑、空转现象,应尽可能增大巡检机器人轮轨间的摩擦力;鉴于应用行业的特殊性,巡检机器人需具备高可靠性,且具有防水防爆性能。
2 巡检机器人结构设计
巡检机器人采用模块化设计,主要由行走机构、驱动机构、过障机构、过弯机构、模块搭载框架组成,其SolidWorks三维结构模型如图2所示。悬线杆间隔架设于井下巷道侧顶壁,用于搭载悬线钢丝绳,形成巡检轨道。驱动机构由电动机和减速器组成,与行走机构、过障机构、过弯机构、模块搭载框架装配组成巡检机器人主体结构,完成巡检机器人在巡检轨道上的行走、过障等动作。
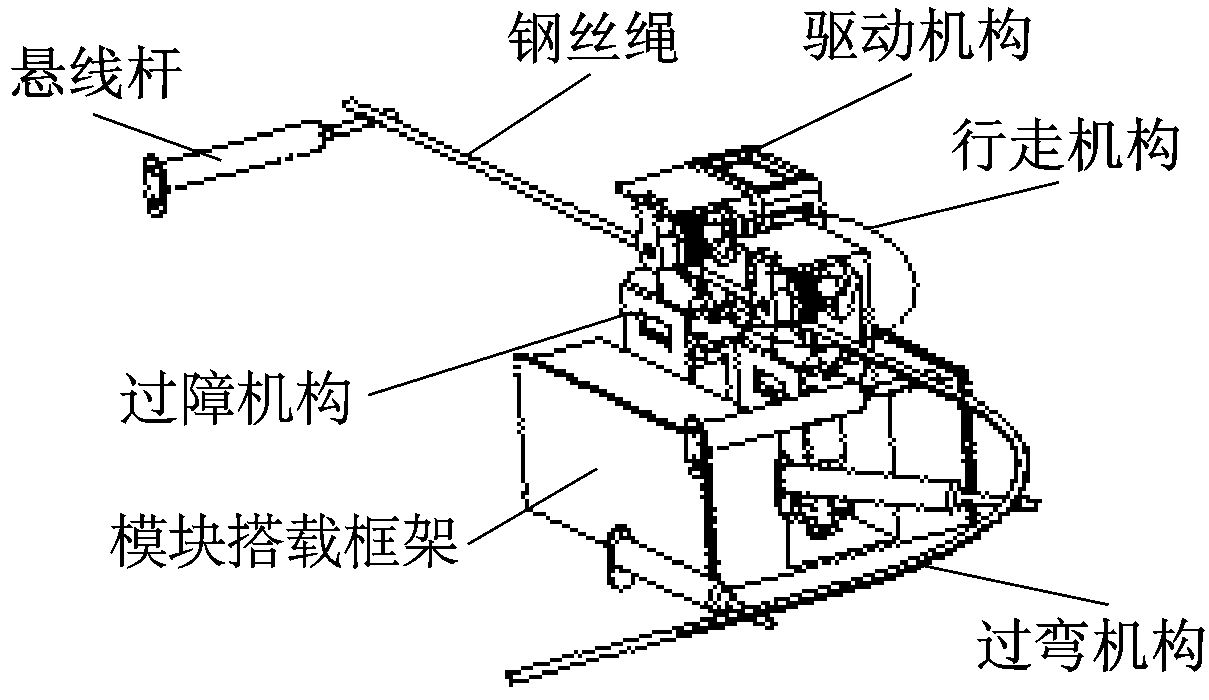
图2 巡检机器人三维结构模型
Fig.2 3D structure model of inspection robot
2.1 行走机构
巡检机器人行走机构由上支架、菱形轴承座、主动轮、主动轴自由端轴承座、主动轴、圆柱连接杆组成,在连接杆上开导向槽,如图3(a)所示。上支架作为行走机构的机架,安装有菱形轴承座、主动轴自由端轴承座、主动轴和主动轮,并通过圆柱连接杆上的外螺纹与模块搭载框架连接。行走机构设计为“U”型半开口结构,合理解决了巡检机器人通过悬线杆时二者相撞的问题。
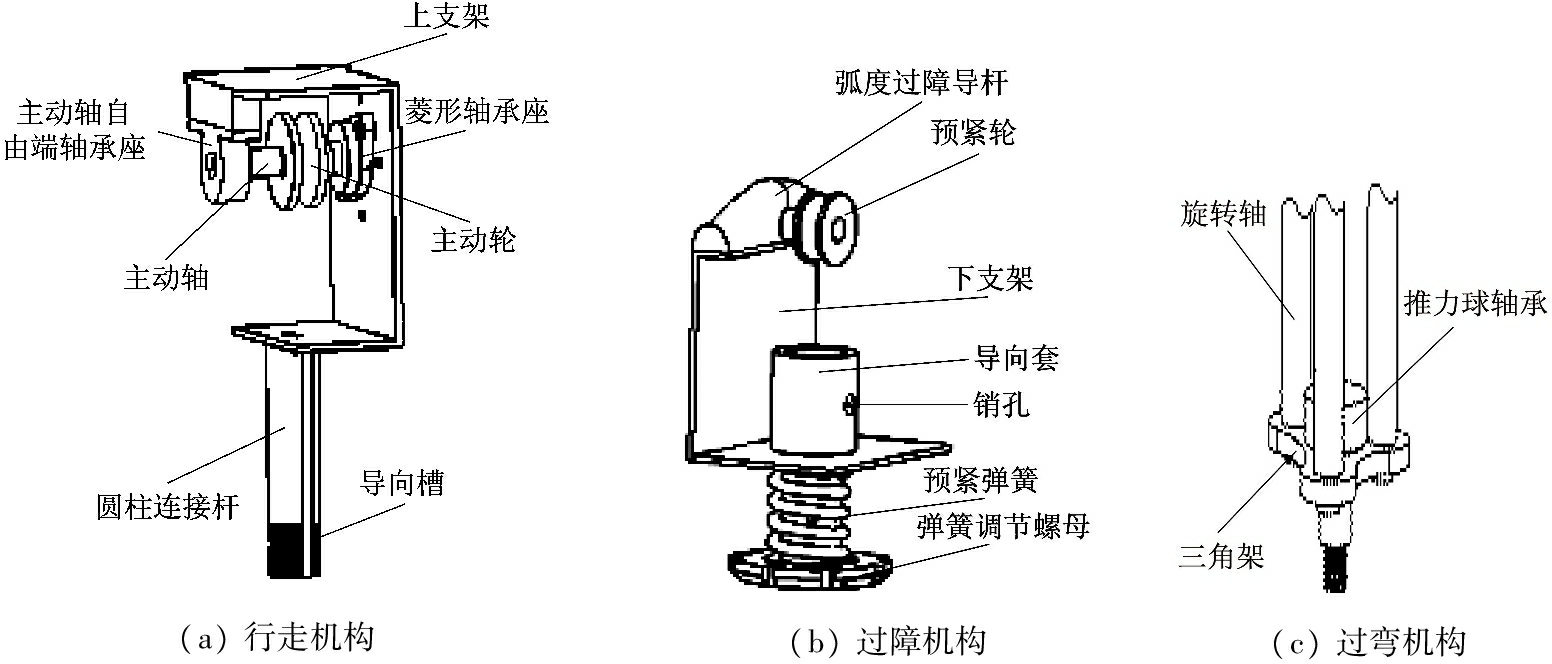
图3 巡检机器人部分结构
Fig.3 Part structures of inspection robot
2.2 过障机构
过障机构包括弧度过障导杆、预紧轮、下支架、导向套、销孔、预紧弹簧、弹簧调节螺母,如图3(b)所示。弧度过障导杆通过数铣加工成型,当巡检机器人通过悬线杆时,弧度过障导杆与悬线杆接触,使得预紧轮与钢丝绳脱离,在驱动力的作用下,巡检机器人可平滑地通过悬线杆。下支架作为过障机构的机架,安装有弧度过障导杆、预紧轮、导向套。下支架与上支架交互,设计为“U”型半开口结构。过障机构通过导向套与圆柱连接杆形成可上下移动的圆柱副;导向套上开设有销孔,销安装于导向套的销孔处,使圆柱连接杆与导向槽配合,将圆柱副简化为移动副,保证巡检机器人顺利通过悬线杆。下支架与弹簧调节螺母之间安装有预紧弹簧,当过障机构通过悬线杆时,预紧弹簧受挤压发生形变,为过障机构下支架提供反作用力,防止巡检机器人脱落;通过悬线杆后,预紧弹簧恢复形变,保证主动轮与预紧轮包络钢丝绳。
2.3 过弯机构
过弯机构主要由三角架、旋转轴和推力球轴承组成,如图3(c)所示。三角架与3根旋转轴连接,中间开设有通孔,滑杆用于连接上支架和模块搭载框架。旋转轴内部安装推力球轴承,并与三角架中间的通孔配合,下方开有螺纹,与模块搭载框架连接。巡检机器人通过旋转轴与三角架之间的转动实现过弯时偏转。
3 基于ADAMS的巡检机器人运动学仿真
受地形影响,煤矿井下存在水平巷道、斜巷道等。悬线巡检轨道沿巷道侧顶壁架设,因此存在水平、上坡和下坡3种形式。巡检机器人在悬线巡检轨道上行走时,存在水平、上坡和下坡3种运动状态。为保证结构设计的合理性,需对巡检机器人进行运动学仿真。
3.1 巡检机器人虚拟样机建立
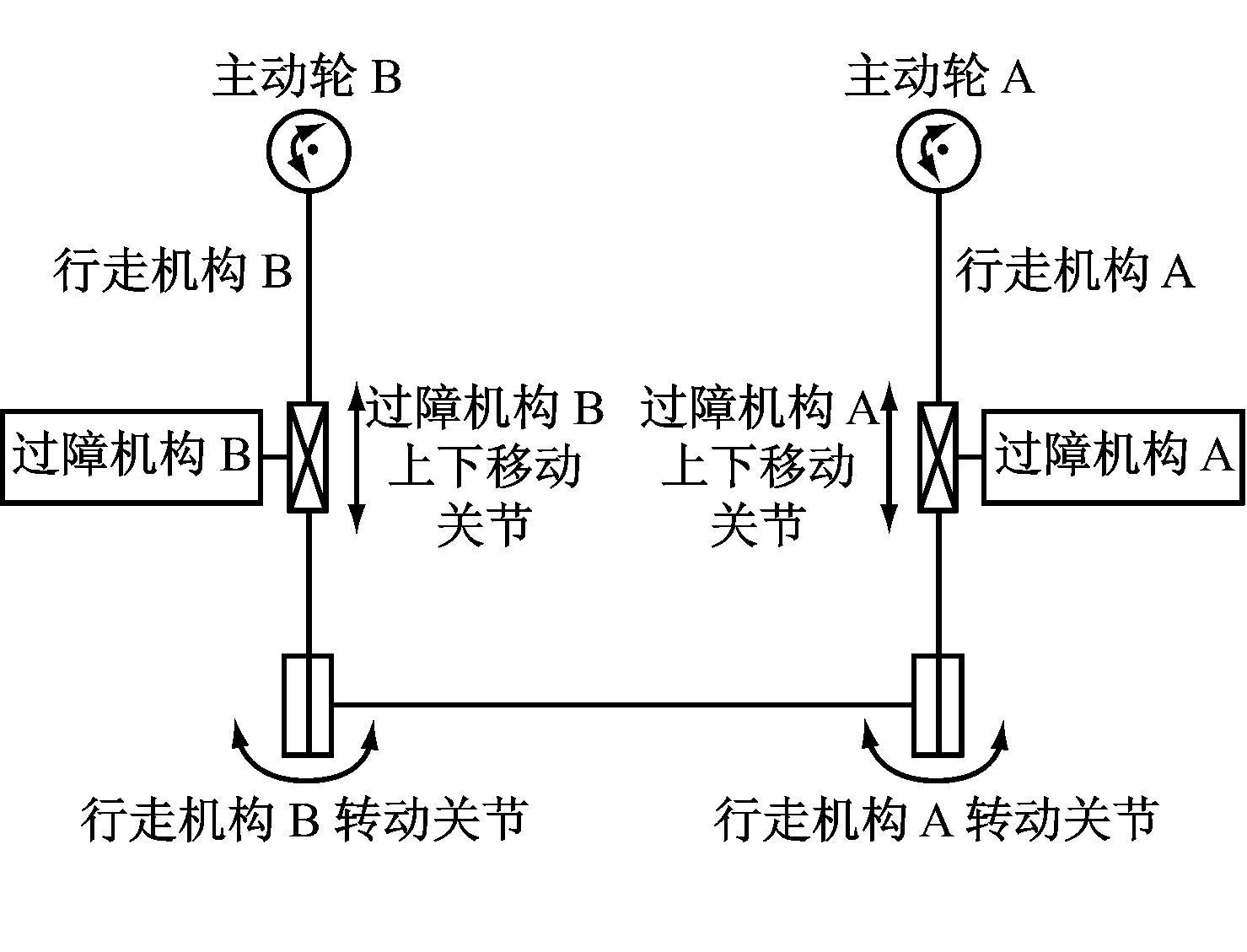
巡检机器人的运动学仿真以巡检机器人各杆件的坐标系为基础。将巡检机器人简化为由过障机构和行走机构组成的前后两臂机构,如图4(a)所示。采用D-H法对各杆件建立坐标系,如图4(b)所示。D-H法用于描述各杆件在坐标系的结构、位形和姿态,以此确定2个相邻关节之间的相对位置和方向。图4(b)中,过障机构A为固定基座,过障机构B为末端执行器,设过障机构A、过障机构A上下移动关节、行走机构A转动关节、行走机构B转动关节、过障机构B上下移动关节、过障机构B编号依次为0—5,其坐标系分别为X0Y0Z0—X5Y5Z5。根据D-H法坐标系确定规则,Z轴为沿机构竖直运动方向,X轴为Z轴的任意一条垂线,Y轴由右手螺旋定则确定[13]。
基于上述D-H坐标系,在ADAMS多刚体动力学仿真分析软件中初步建立巡检机器人虚拟样机模型。采用布尔运算对虚拟样机进行简化处理,减少一些不必要的连接,从而减小仿真时的计算量[14-15]。简化的巡检机器人虚拟样机如图5所示。
(a) 简化的巡检机器人结构
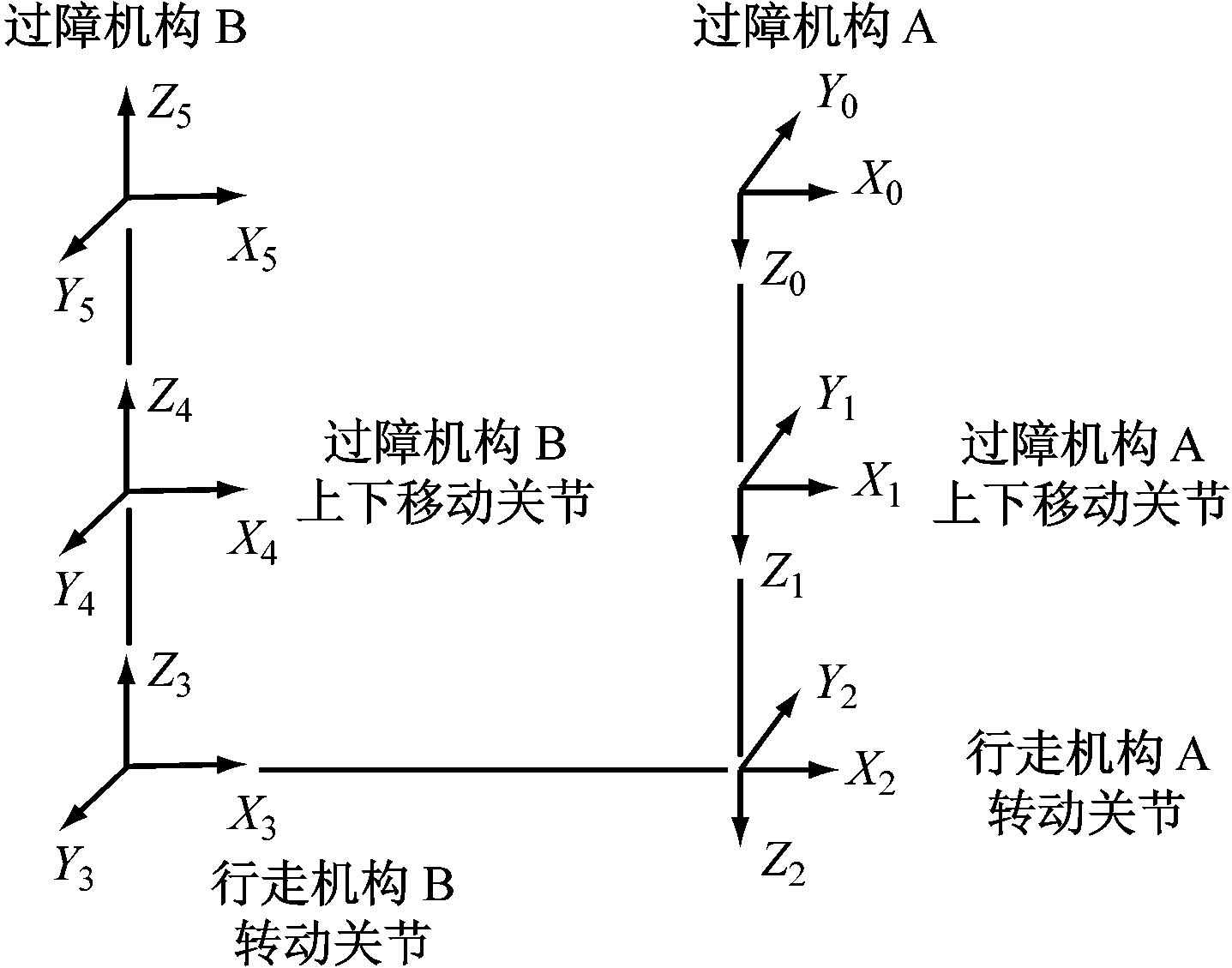
(b) 各杆件坐标系
图4 简化的巡检机器人结构及各杆件坐标系
Fig.4 Simplified structure of inspection robot and coordinate system for each member bar
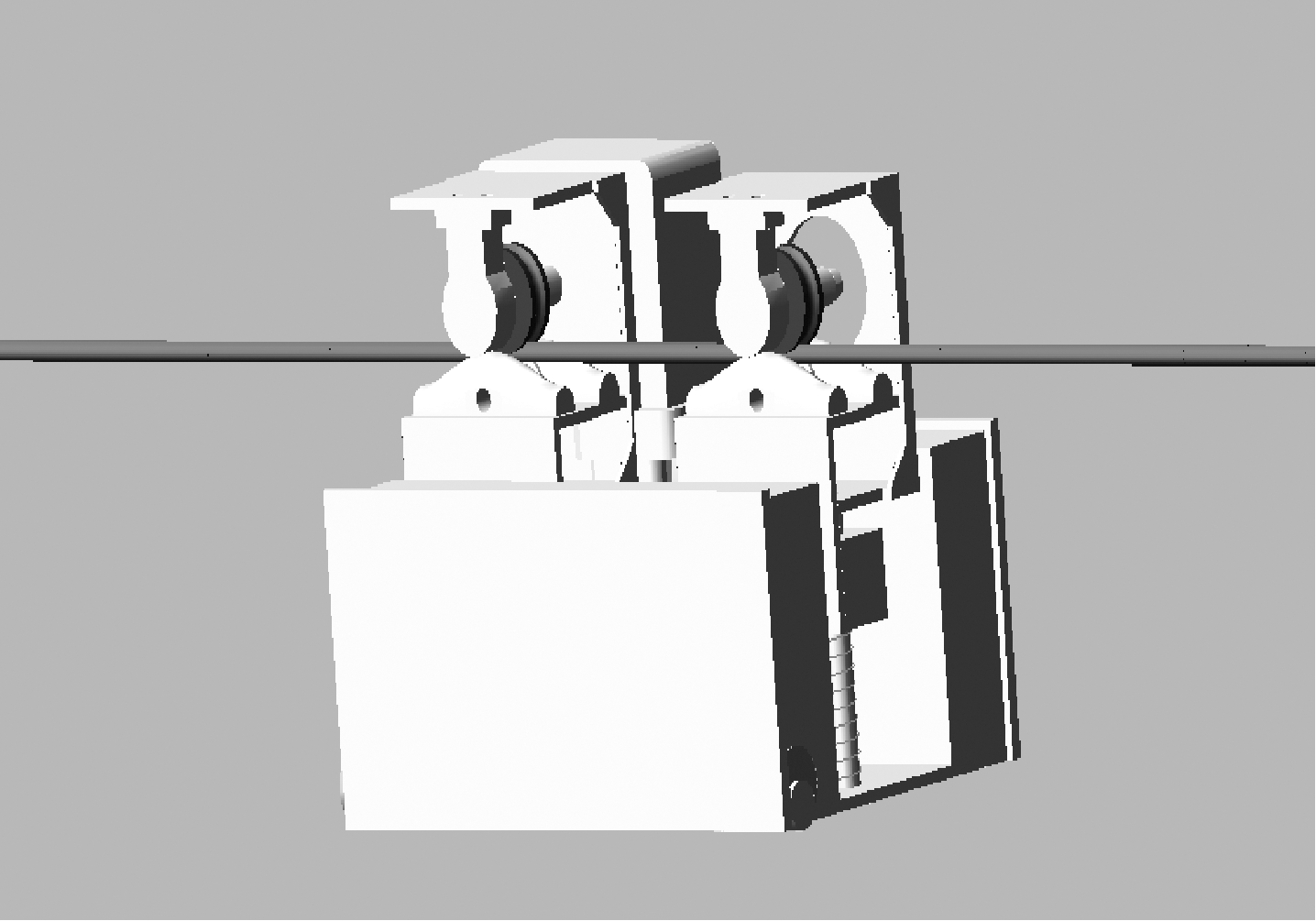
图5 简化的巡检机器人虚拟样机模型
Fig.5 Simplified virtual prototype model of inspection robot
仿真时,为保证巡检机器人正常行走,主动轮添加3.49 rad/s转速和12 N·m转矩作为驱动力,同时设置预紧弹簧的仿真参数:刚度系数为5.6×10-2N/mm,阻尼系数为1.4×103N·s/m,预载荷为80 N。
3.2 运动仿真分析
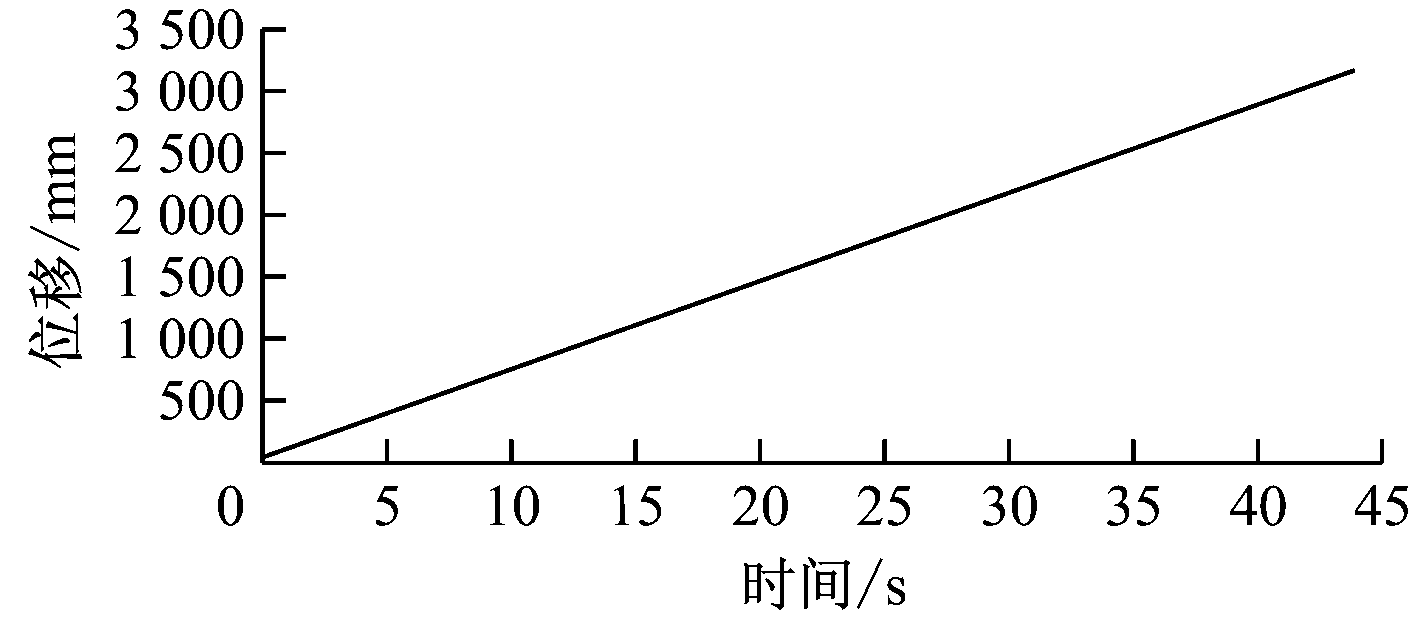
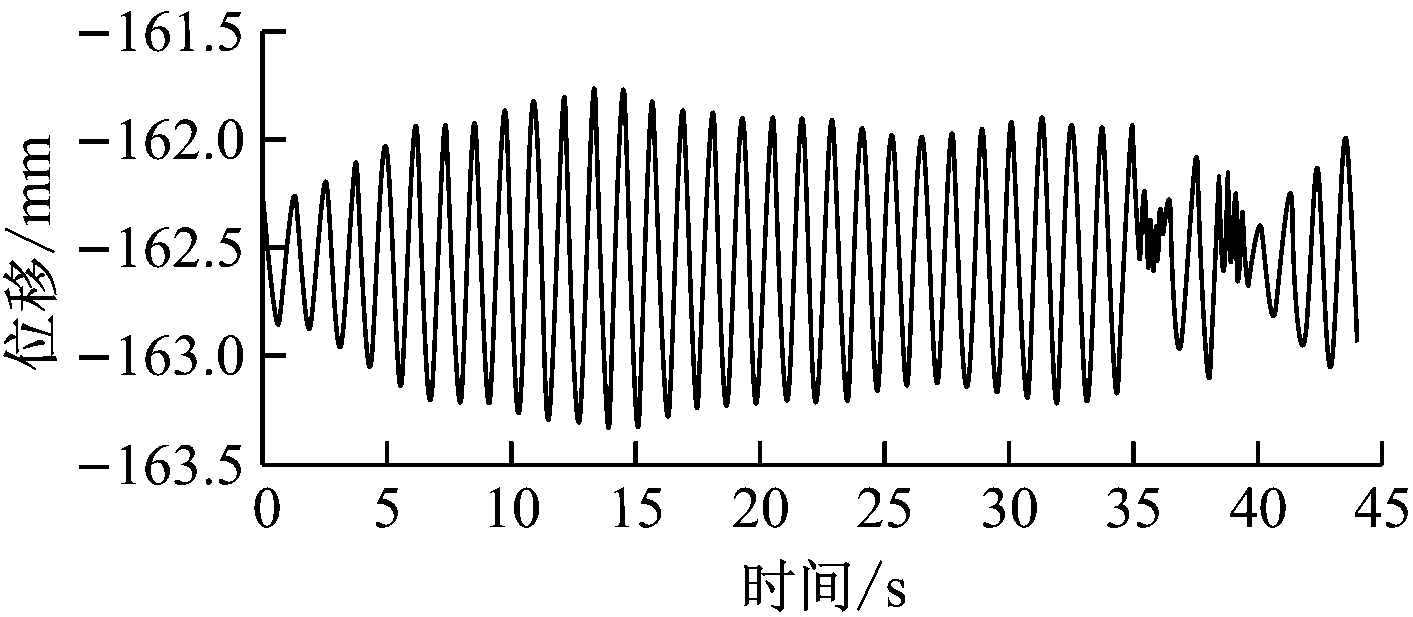
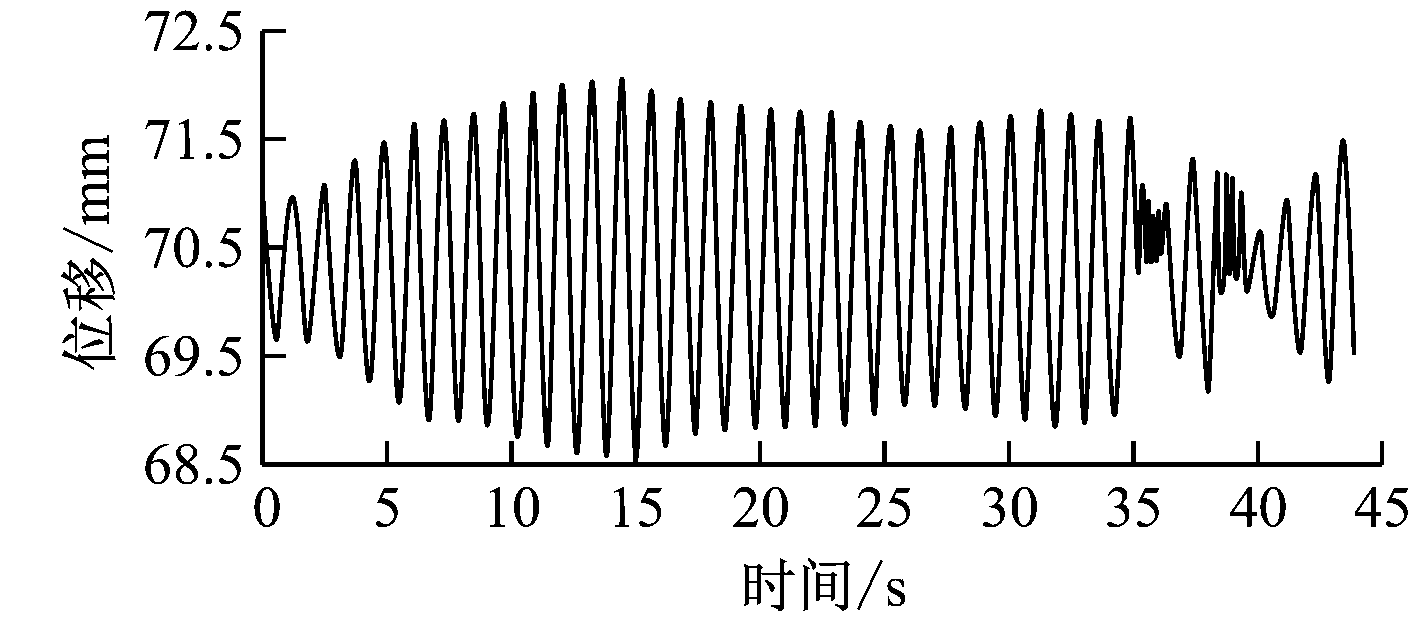
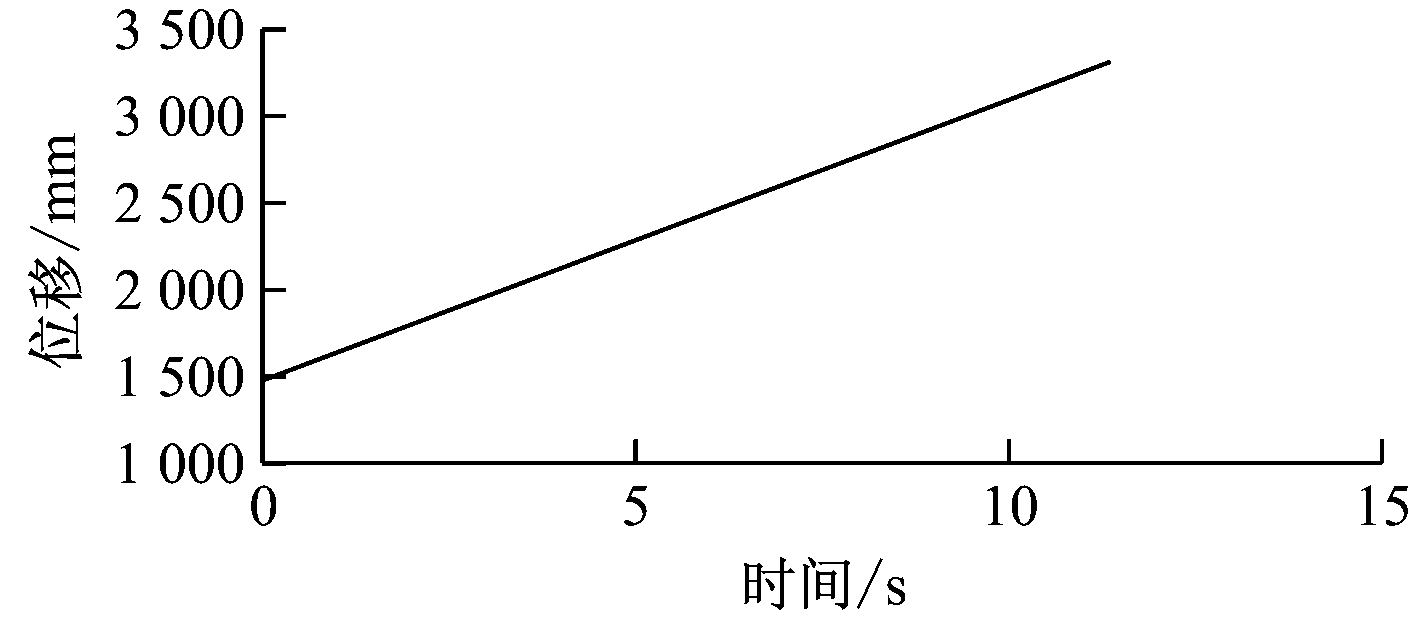
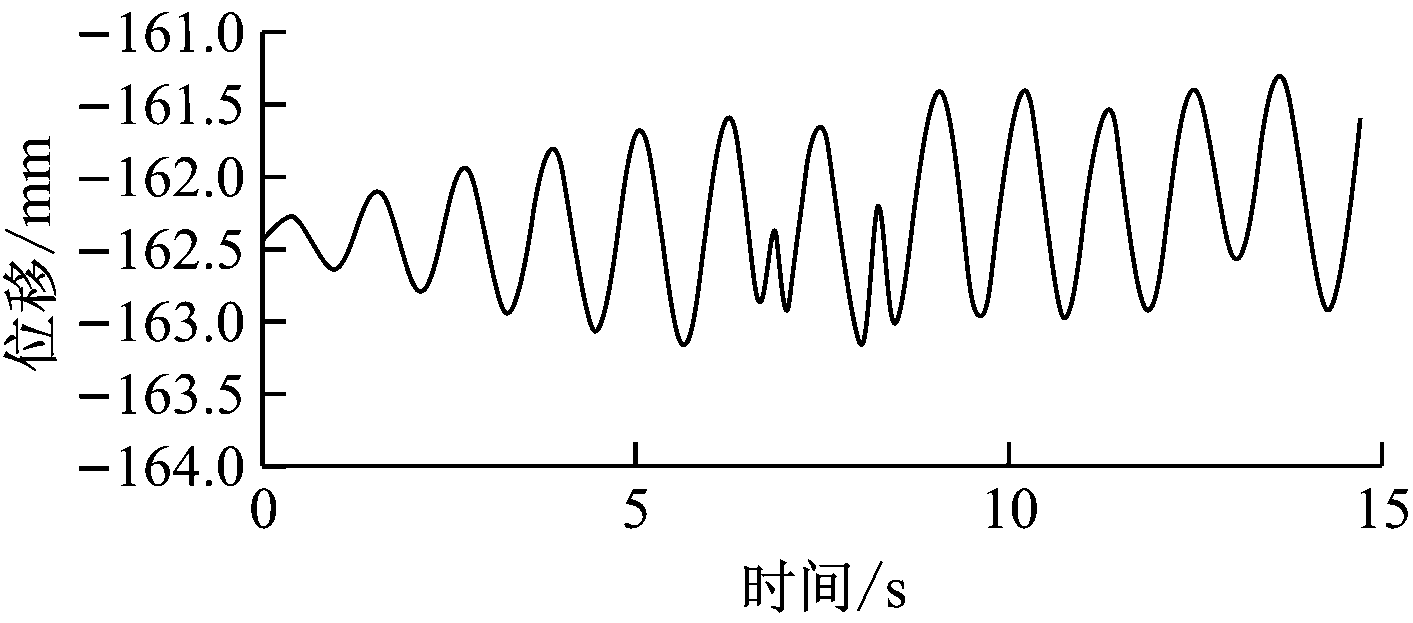
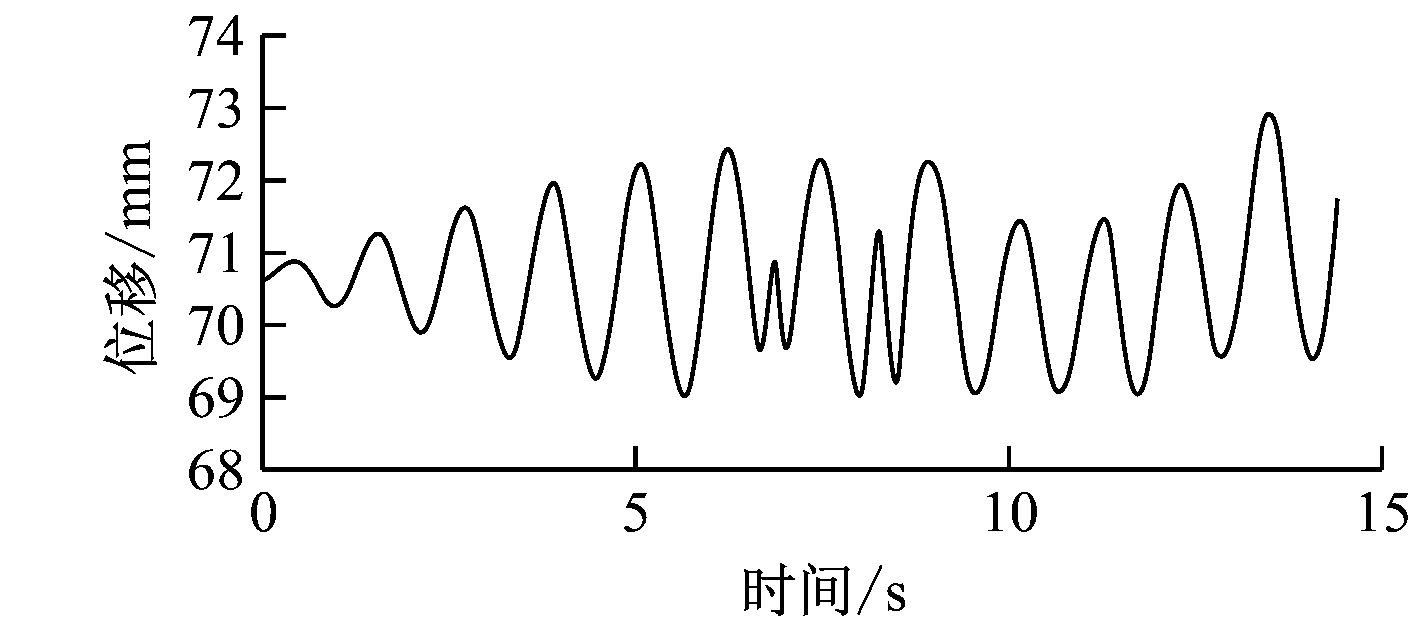
对巡检机器人水平行走且过障、上坡且过障、下坡且过障3种运动状态进行仿真,结果如图6—图8所示。
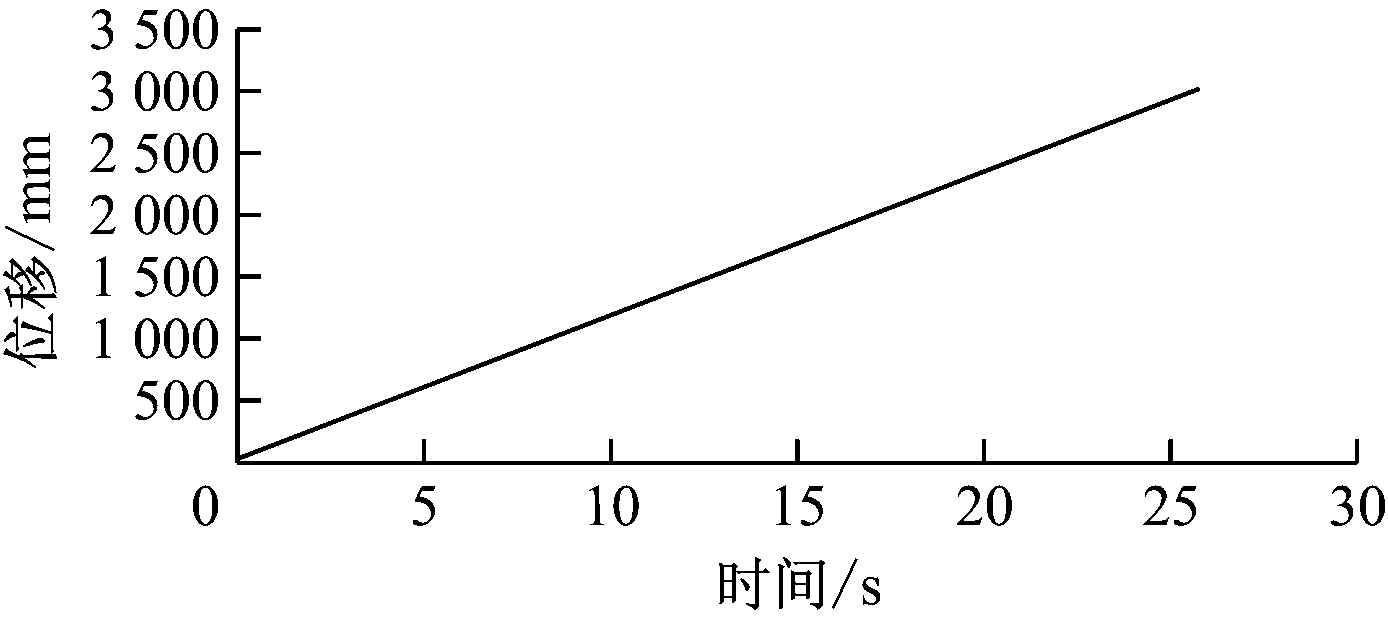
(a) 水平沿线运动方向
(b) 水平侧摆运动方向
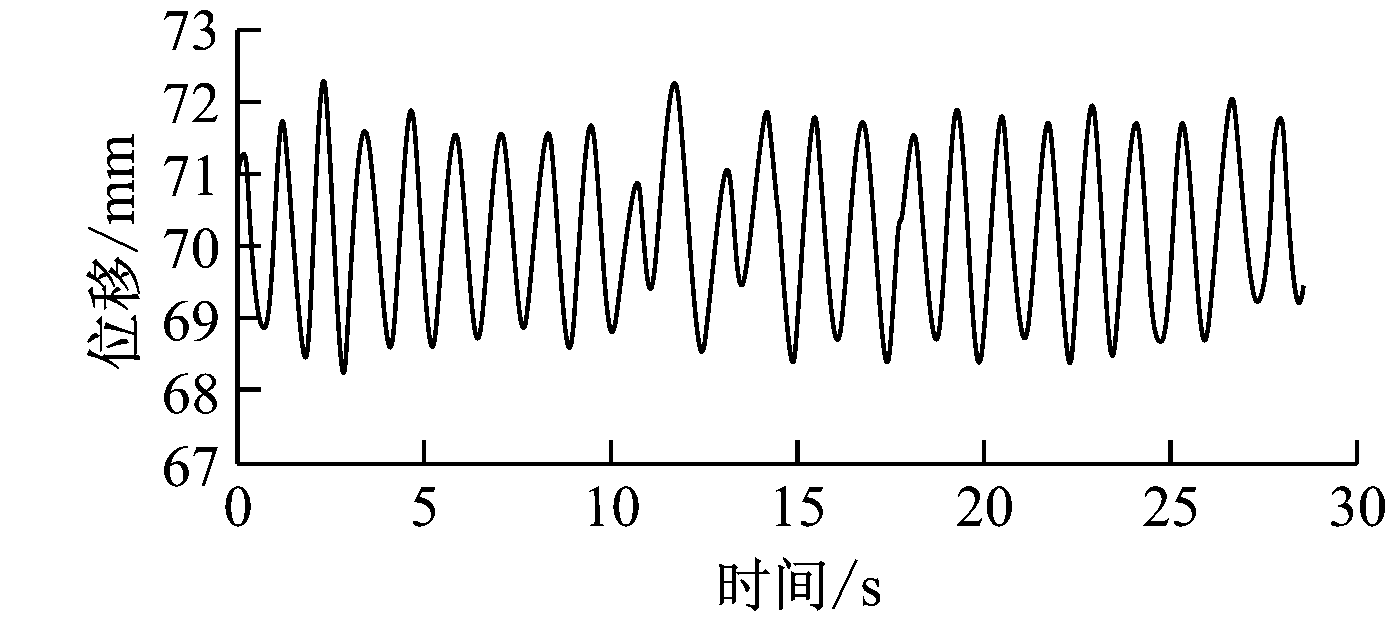
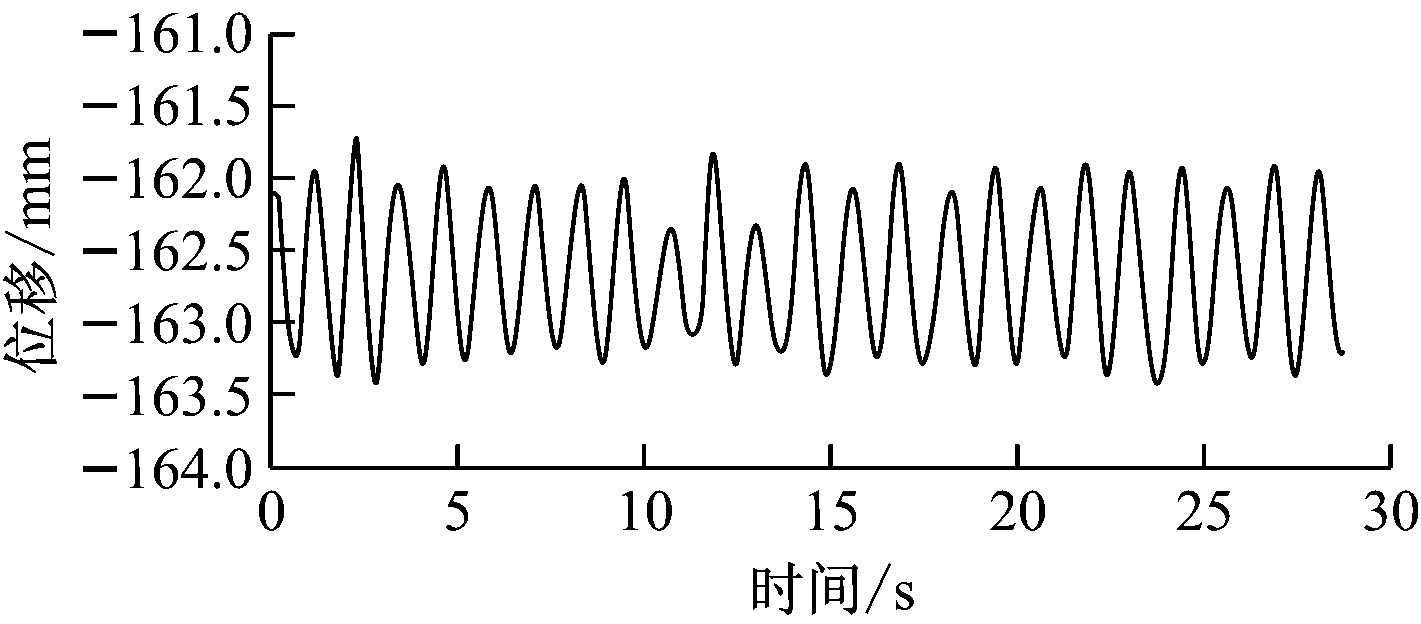
(c) 竖直运动方向
图6 巡检机器人在水平行走且过障状态下的位移-时间曲线
Fig.6 Displacement-time curve of inspection robot under the state of horizontally walking with obstacle navigation
(a) 水平沿线运动方向
(b) 水平侧摆运动方向
(c) 竖直运动方向
图7 巡检机器人在上坡且过障状态下的位移-时间曲线
Fig.7 Displacement-time curve of inspection robot under the state of uphill walking with obstacle navigation
(a) 水平沿线运动方向
(b) 水平侧摆运动方向
(c) 竖直运动方向
图8 巡检机器人在下坡且过障状态下的位移-时间曲线
Fig.8 Displacement-time curve of inspection robot under the state of downhill walking with obstacle navigation
可看出在不同运动状态下,随着时间的推移,巡检机器人在水平沿线运动方向保持匀速行进;由于仿真时巡检机器人质心未能准确调整至主动轮正下方,导致巡检机器人在水平侧摆运动方向出现摆动现象,3种状态下的最大侧摆位移分别为1.15,1.2,1.05 mm;由于悬线钢丝绳为柔性体,导致巡检机器人在竖直方向的运动出现小幅振荡,在3种状态下的最大位移分别为2.75,2.5,2 mm;巡检机器人在不同运动状态下过障时,由于悬线杆为刚性体,钢丝绳与悬线杆固定,巡检机器人通过固定点处时振幅会减小,通过悬线杆后回到原有状态。
经分析可以得出结论:① 巡检机器人在水平沿线运动方向始终能够保持匀速直线运动,从而保障巡检任务正常完成;② 巡检机器人位移反映整个巡检机器人的质心变化,由于悬线钢丝绳为柔性体,巡检机器人质心在竖直运动方向和水平侧摆运动方向上有小范围波动,但均在允许范围之内;③ 巡检机器人在整个运动过程中的位移变化比较平稳,验证了机械结构设计的合理性。
4 结语
对巡检机器人的结构进行了设计,详细说明了行走机构、过障机构和过弯机构设计及装配方案;在ADAMS中建立了巡检机器人虚拟样机,并进行了运动学仿真分析,结果表明巡检机器人在不同运动状态下均能够较平稳地行走、过障,验证了结构设计的合理性。该巡检机器人可为煤矿巷道环境及设备运行状态监测提供新的技术途径。
参考文献(References):
[1] 陈维健.中国煤矿安全技术与管理:矿井安全监测监控设备[M].徐州:中国矿业大学出版社,2014.
[2] 武先利,杨勇,魏峰.煤矿井下安全监控系统技术改进探讨[J].煤矿安全,2009,40(8):109-111.
[3] 王国庆,许红盛,王恺睿.煤矿机器人研究现状与发展趋势[J].煤炭科学技术,2014,42(2):73-77.
WANG Guoqing,XU Hongsheng,WANG Kairui.Research status and development trend of coal mining robots[J].Coal Science and Technology,2014,42(2):73-77.
[4] 许旺,贾瑞清,江涛,等.薄煤层综采工作面安全监测移动机器人的研究[J].矿山机械,2010,38(20):18-21.
XU Wang,JIA Ruiqing,JIANG Tao,et al.Research on mobile robots for monitoring safety of equipments on fully-mechanized working face of thin coal seam[J]. Mining & Processing Equipment,2010,38(20):18-21.
[5] 左敏.矿山智能巡检机器人的关键技术[J].金属矿山,2012,41(7):120-122.
ZUO Min.Key technology of intelligent mine patrol robot[J].Metal Mine,2012,41(7):120-122.
[6] 陆文涛,裴文良,张树生,等.矿用带式输送机巡检机器人研究与设计[J].煤矿机械,2015,36(9):18-20.
LU Wentao,PEI Wenliang,ZHANG Shusheng,et al.Research and design of mine-used belt conveyor inspection robot system[J].Coal Mine Machinery,2015,36(9):18-20.
[7] 裴文良,张树生,李军伟.矿用巡检机器人设计及其应用[J].制造业自动化,2017,39(2):73-74.
PEI Wenliang,ZHANG Shusheng,LI Junwei.The design and application of inspection robot for mine[J].Manufacturing Automation,2017,39(2):73-74.
[8] 吴功平,肖晓晖,郭应龙,等.架空高压输电线自动爬行机器人的研制[J].中国机械工程,2006,17(3):237-240.
WU Gongping,XIAO Xiaohui,GUO Yinglong,et al.Development of a crawling robot for overhead high-voltage transmission line[J].China Mechanical Engineering,2006,17(3):237-240.
[9] 张廷羽.高压线巡检机器人的研究[D].上海:上海大学,2009.
[10] 王鲁单,王洪光,房立金,等.一种输电线路巡检机器人控制系统的设计与实现[J].机器人,2007,29(1):7-11.
WANG Ludan,WANG Hongguang,FANG Lijin,et al.Design and implementation of the control system of a power transmission line inspection robot[J].Robot,2007,29(1):7-11.
[11] 丁克舫,张洪斌.煤矿井下环境在人-机-环境系统中的重要地位[J].煤矿安全,2009,40(8):120-121.
DING Kefang,ZHANG Hongbin.The important position of the coal mine environment in the human machine environment system[J].Safety in Coal Mines,2009,40(8):120-121.
[12] 孙力翔.浅谈我国特大型煤矿的采掘运特点[J].煤矿开采,2010,15(2):1-3.
SUN Lixiang.Discussion on mining,driving and transporting characteristics of super-sized coal mines in China[J].Coal Mining Technology,2010,15(2):1-3.
[13] 郭发勇,梅涛,赵江海.D-H法建立连杆坐标系存在的问题及改进[J].中国机械工程,2014,25(20):2710-2714.
GUO Fayong,MEI Tao,ZHAO Jianghai.Problems and improvement of D-H method for establishing connecting rod coordinate system[J].China Mechanical Engineering,2014,25(20):2710-2714.
[14] 郑建荣.ADAMS虚拟样机技术入门与提高[M].北京:北京工业出版社,2008.
[15] 朱华炳,张娟,宋孝炳.基于ADAMS的工业机器人运动学分析和仿真[J].机械设计与制造,2013(5):204-206.
ZHU Huabing,ZHANG Juan,SONG Xiaobing.Kinematic analysis and simulation of industrial robot based on ADAMS[J].Machinery Design & Manufacture,2013(5):204-206.