0 引言
煤矿灾害发生以后,灾害现场的环境十分恶劣,有大量的有毒有害气体,并且存在瓦斯爆炸、冒顶、片帮等二次灾害危险,所以,当矿难发生时如何在第一时间进行救援,成为挽救被困工作人员生命财产安全的一大难题[1-2]。21世纪以来,机器人技术已经应用到各种危险环境中[3-4],以代替人类完成一些危险作业。当矿难发生时,若有自主探测功能的机器人代替救援人员进入灾害现场进行信息采集,并将这些信息反馈给地面救援人员,便可制定合理的救援方案,极大地减少因矿井中存在危险而导致的二次伤亡。
为了研制能够代替救援人员进入煤矿井下进行探测的机器人,国内外学者进行了大量的相关研究开发工作。2006年,国内首台用于煤矿环境探测和煤矿灾难搜救的机器人CUMT-I[5]由中国矿业大学研制成功。此后,北京理工大学、唐山开诚电气设备有限公司等单位也纷纷投入到煤矿救援探测机器人的开发与研制之中。同样,国外的一些研究机构也对煤矿救援机器人进行了大量的研究,典型的有美国智能履带车中心研发的RATLER和日本东京工业大学研制的蛇形履带车[6]。经过多年的研究,煤矿井下探测机器人在结构、机动性[7]、自主导航定位[8-9]等方面已经有了很大的突破。随着各种算法应用于煤矿井下机器人的各个方面[10-12],煤矿探测机器人的研究已经较为成熟。但是,纵观国内外的每一起矿难,均没有煤矿探测机器人成功应用的案例。其中一个重要原因是现在的煤矿探测机器人的控制主要还是通过无线遥控来实现,受其通信距离的限制,机器人深入煤矿井下的距离及其探测范围也相应受到制约。 为解决该问题,笔者设计了一种可自动回撤且可以自主延长通信距离的ZD-2017煤矿探测机器人。该机器人通过中继器弹射系统来延长通信距离,具有自动回撤功能,当通信信号突然中断时,机器人可自动回撤到安全位置。ZD-2017煤矿探测机器人可以在未知的煤矿灾难现场长距离稳定、安全地工作,在矿难发生时,可替代煤矿救援人员深入煤矿井下完成初期危险的探测工作,为进一步的救援提供重要的现场数据信息。
1 机器人系统组成
ZD-2017煤矿探测机器人的外部结构如图1所示,它主要包括移动底盘、中继器弹射系统、电池箱和各种传感器及控制系统。
1.1 移动底盘
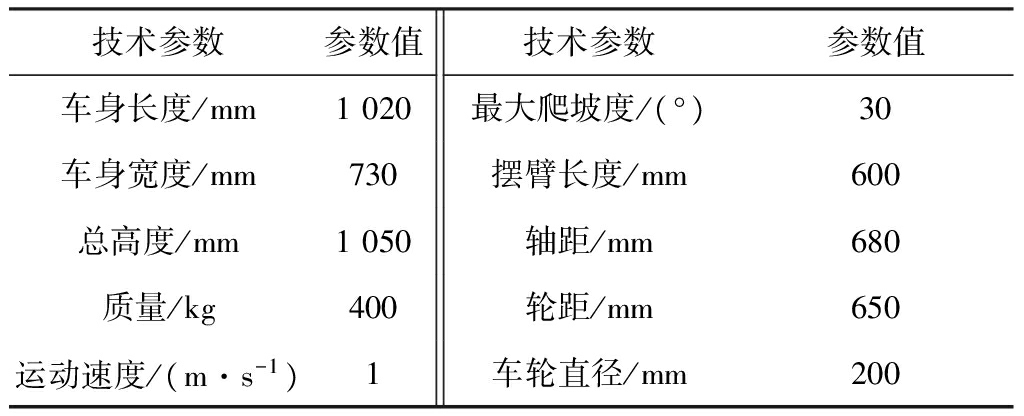
ZD-2017煤矿探测机器人的移动底盘采用履带传动结构[13-14],即由2个直流伺服电动机分别驱动车体左右两侧的履带轮。此外,在车身的前后部各安装2个摆臂,从而确保ZD-2017煤矿探测机器人可以爬斜坡和跨越台阶。ZD-2017煤矿探测机器人选用48 V/60 A·h可充电锂电池作为电源模块,其主要技术参数见表1。
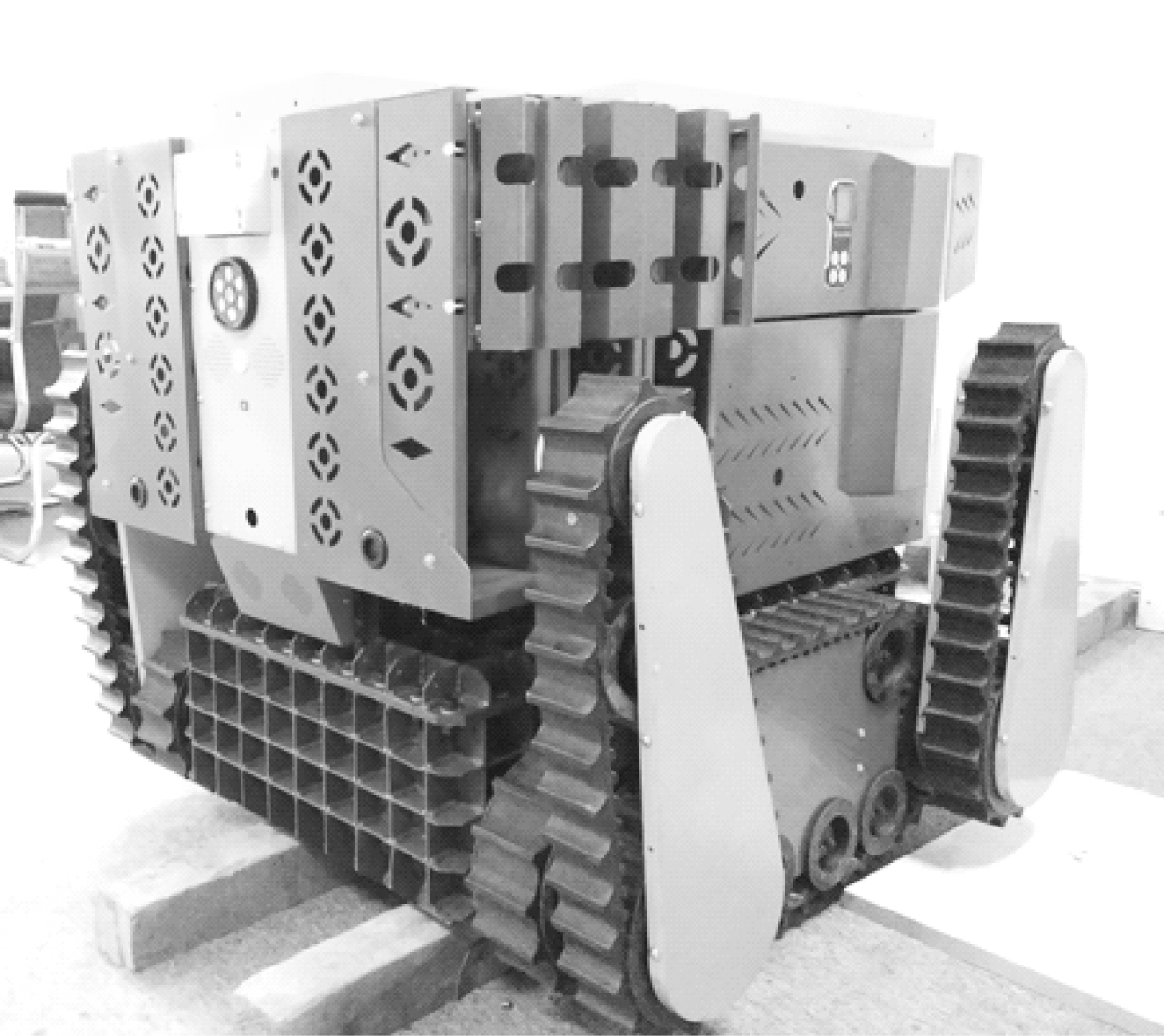
图1 ZD-2017煤矿探测机器人外部结构
Fig.1 External structure of ZD-2017 type coal mine detection robot
表1 ZD-2017煤矿探测机器人的主要技术参数
Table 1 Main technical parameters of ZD-2017 type coal mine detection robot
1.2 传感器组
ZD-2017煤矿探测机器人车体内外分别安装有各种传感器。车体内部安装的传感器主要包括用于测量车体侧倾斜的倾角仪、用于记录两侧车轮位移的编码器、用于记录摆臂相对于车身转角的电位计。车体外部安装的传感器主要包括温度传感器、压力传感器、各种气体检测传感器、激光测距传感器。其中,激光测距传感器(LIPS1—LIPS4)共有4个,分别安装于车体正前方、正后方、左右两侧的中间位置,如图2所示。此外,分别在车体左右两侧安装了扬声器,在车体前方、后方和左右两侧位置安装了多个矿用本质安全型便携式无线摄像机,利用图像分割器获得环境中多方位的图像信息。
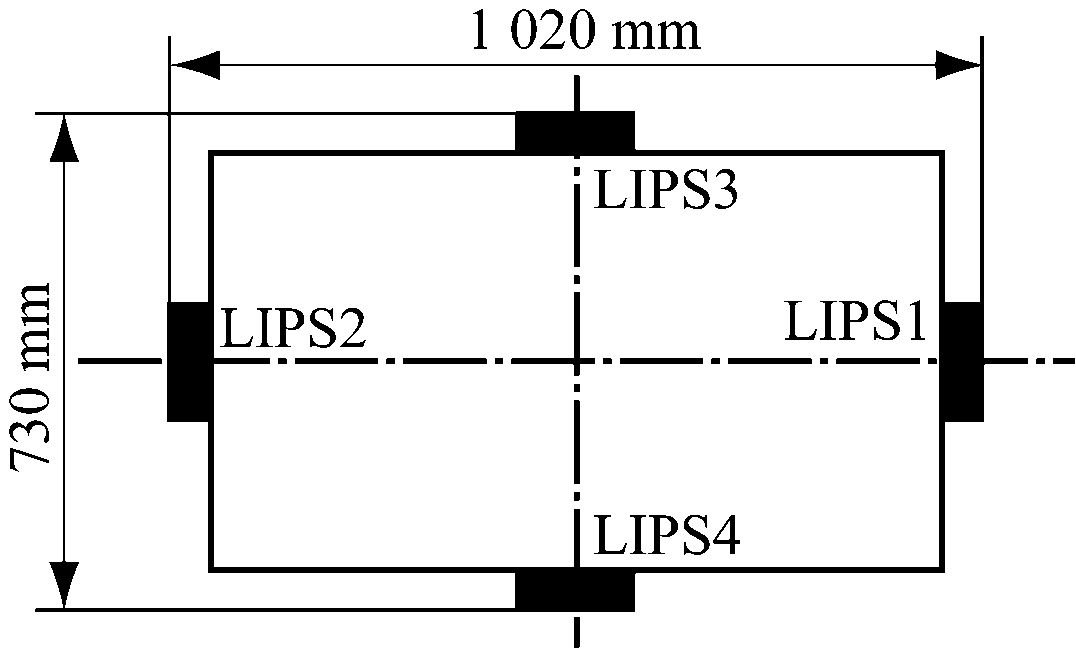
图2 激光传感器的位置分布
Fig.2 Distribution of laser sensors
1.3 中继器弹射系统
ZD-2017煤矿探测机器人通过中继器弹射系统延长其通信距离。中继器弹射系统包括6组中继器弹射器及与中继器固连的中继器模块支撑架。弹射器如图3(a)所示,利用继电器来开启弹射器的弹射开关;中继器模块支撑架如图3(b)所示,结构设计参考了雨伞的工作原理。ZD-2017煤矿探测机器人工作时,弹射器固定在其车身后部,中继器模块支撑架折叠放置在弹射器中。当操作人员发现ZD-2017煤矿探测机器人所在工作环境信号较弱时,通过上位机控制第1组弹射器的电磁式行程开关将相应的中继器模块支撑架弹射出去,由于各中继器模块及外部网络可以互相通信,所以,此时第1组中继器的网络将与外部网络及任意一个车载中继器的网络相连,从而将外部网络信号进行转发,起到延长通信距离的作用。每个中继器的传输距离为1 000 mm左右。ZD-2017煤矿探测机器人车载6组中继器弹射模块,所以,在井下作业时可将工作行程延长到6 000 mm。
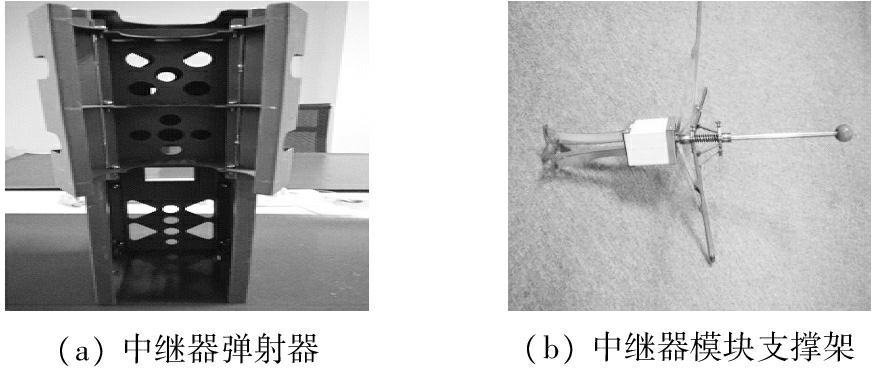
图3 中继器弹射系统
Fig.3 Ejection system of repeater
2 机器人控制系统
ZD-2017煤矿探测机器人的控制系统结构如图4所示。ZD-2017煤矿探测机器人车载CPU为TMS320F28335 DSP芯片,后方控制台为嵌入式工控机MEC-5031,工控机与ZD-2017煤矿探测机器人之间通过无线进行通信,DSP根据所接收到的工控机指令控制机器人完成相应的动作和功能。与此同时,ZD-2017煤矿探测机器人收集的传感器数据和图像通过DSP传输给工控机,以便操作人员了解井下状况。无线遥控器比上位机有更高一级的控制级,若发生特殊情况,操作人员可以直接通过无线遥控器对ZD-2017煤矿探测机器人的运动及相关功能进行控制。
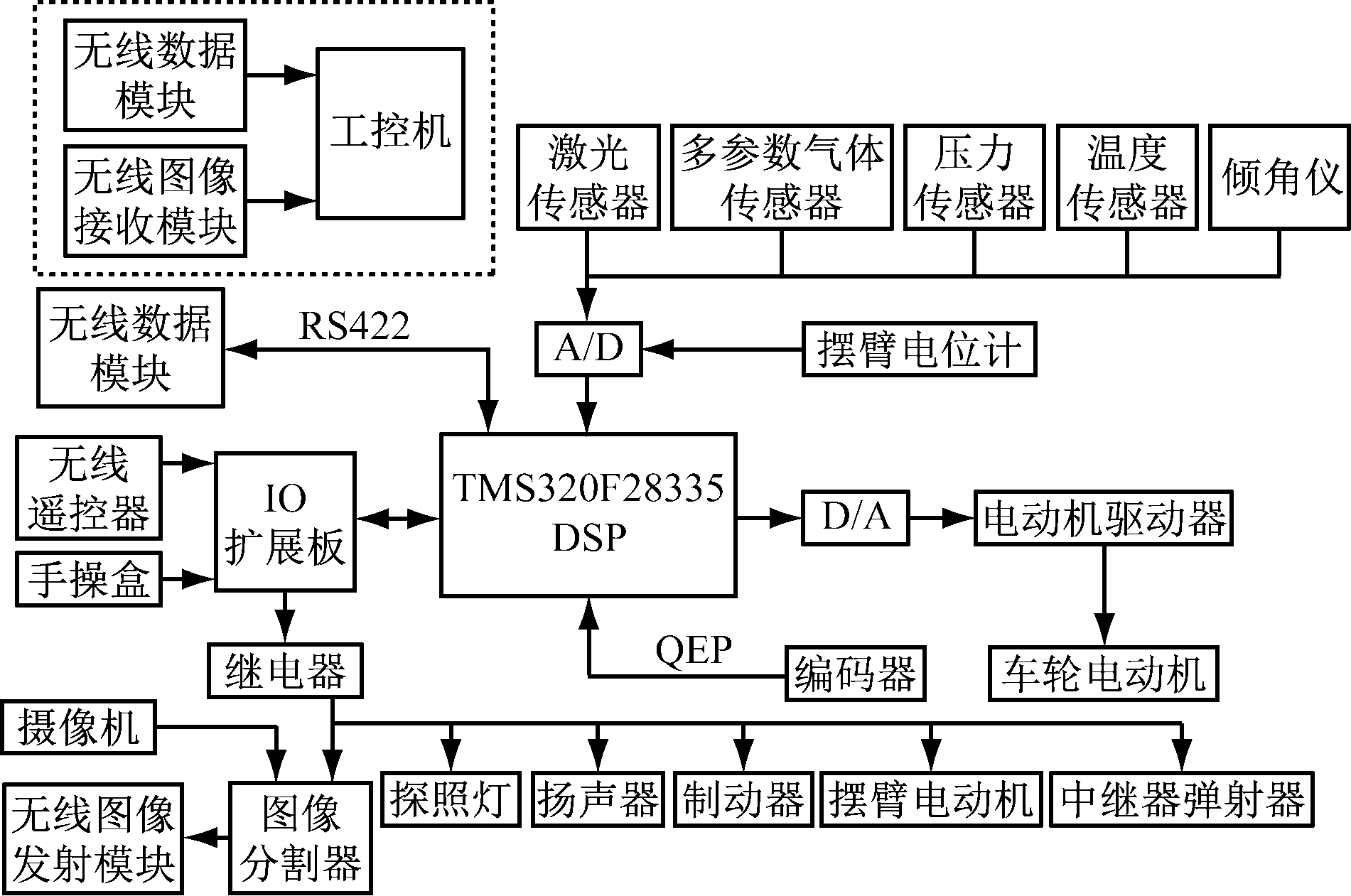
图4 ZD-2017煤矿探测机器人控制系统结构
Fig.4 Control system structure of ZD-2017 type coal mine detection robot
3 机器人自动回撤功能实现
即便ZD-2017煤矿探测机器人可通过车载中继器弹射系统延长其通信距离,但当矿难发生时,井下环境非常复杂,其与上位机的通信很容易被突然中断,一旦通信中断,后方的操作人员将失去对ZD-2017煤矿探测机器人的控制,机器人将不能继续正常作业。为了确保可以完成整个探测任务,ZD-2017煤矿探测机器人设计有自动回撤功能,即当无线通信突然中断时,机器人将启动自动回撤功能,沿其探测时的运动路径原路返回,直到回撤到无线通信正常的区域。自动回撤由路径记忆和按原路返回2个阶段组成。在路径记忆阶段,ZD-2017煤矿探测机器人不仅可采集环境信息,而且可根据编码器和激光传感器采集的数据记录该过程相应的运动路径信息;在按原路返回阶段,ZD-2017煤矿探测机器人利用已采集的路径信息与回撤时传感器获得的路径信息进行数据匹配,实现按原路径返回。采用编码器与激光传感器集成数据的方法,且基于迭代最近点(Iterative Closest Point ,ICP)算法进行双重数据匹配,以逐步调整机器人的位置和方向角,从而达到较高的回撤精度。自动回撤算法的流程如图5所示。
ZD-2017煤矿探测机器人在探测阶段记录运动的路径,具体步骤如下:
(1) 创建堆栈并进行初始化,k=0(k为此时刻所处的运动状态);机器人以初始位置点Pk为参考位置点,并做一次激光传感器扫描,得到参考扫描点集Sk,Sk={pk1,pk2,…,pkn}(Sk为第k种运动状态下激光传感器的扫描点集,其中k=1,2,…,n,n为探测过程中运动状态的数目),pki={ρki,αki}∈R2(R2为二维空间)。
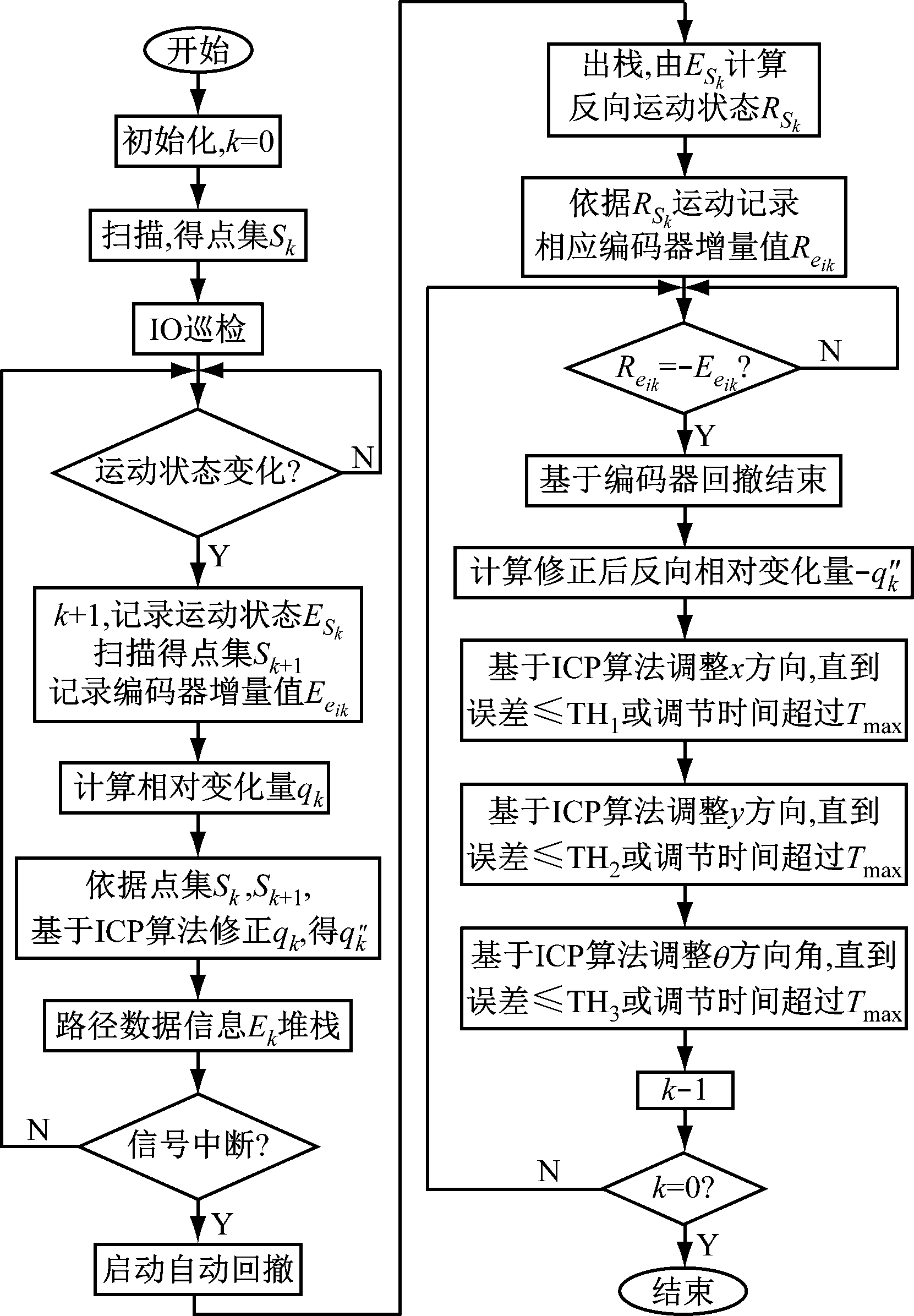
图5 自动回撤算法流程
Fig.5 Flow chart of automatic returning algorithm
(2) DSP进行IO巡检,如果发现ZD-2017煤矿探测机器人当前的运动状态相对于初始运动状态发生了变化,将变化后的运动状态记为第k+1种运动状态,记录前一次的运动状态值ESk,同时记录变化瞬时分别用于记录左右两侧驱动轮转速的编码器数值,并将此时的数值与其初始数值比较,从而得到该运动状态下编码器的增量值,将其记为Eeik(i=1,2),煤矿探测机器人在新的当前位置Pk+1做另外一次扫描,得到当前扫描点集![]() 与Pk+1间的初始相对变化量qk由编码器数据计算获得。为了修正编码器的读数误差,本文运用基于ICP算法的激光数据配准方法,通过3步迭代修正Pk与Pk+1之间的相对变化量qk(xk,yk,θk)(qk包含了ZD-2017煤矿探测机器人第k种运动状态位置相对于第k-1运动状态位置在二维坐标系上的x、y坐标增量值和机器人与x轴夹角的增量值θ),通过修正后的变化量记为
与Pk+1间的初始相对变化量qk由编码器数据计算获得。为了修正编码器的读数误差,本文运用基于ICP算法的激光数据配准方法,通过3步迭代修正Pk与Pk+1之间的相对变化量qk(xk,yk,θk)(qk包含了ZD-2017煤矿探测机器人第k种运动状态位置相对于第k-1运动状态位置在二维坐标系上的x、y坐标增量值和机器人与x轴夹角的增量值θ),通过修正后的变化量记为![]() 迭代最近点ICP算法是最常用的扫描匹配算法。它对于当前扫描中的每一点,在参考扫描中选择和该点的距离最小的点组成对应点对,在不知道实际的旋转和平移的情况下,定义了一个合理的规则来确定对应性,根据对应性规则求出对应点对,然后使对应点对之间的距离平方和最小化,从而求得机器人的位姿变换值。
迭代最近点ICP算法是最常用的扫描匹配算法。它对于当前扫描中的每一点,在参考扫描中选择和该点的距离最小的点组成对应点对,在不知道实际的旋转和平移的情况下,定义了一个合理的规则来确定对应性,根据对应性规则求出对应点对,然后使对应点对之间的距离平方和最小化,从而求得机器人的位姿变换值。
(3) 将已经保存的路径数据信息![]() 压入堆栈中,重复步骤(2)。如果DSP判别当前环境中无线控制信号中断,或者操作人员按下自动回撤开关时,重复步骤(2)、步骤(3),以便记录ZD-2017煤矿探测机器人进行自动回撤前的最后一次运动信息,紧接着机器人将进入自动回撤状态。
压入堆栈中,重复步骤(2)。如果DSP判别当前环境中无线控制信号中断,或者操作人员按下自动回撤开关时,重复步骤(2)、步骤(3),以便记录ZD-2017煤矿探测机器人进行自动回撤前的最后一次运动信息,紧接着机器人将进入自动回撤状态。
(4) 将堆栈中已保存的数据逐一弹出,把运动状态ESk的反向运动状态(前进的反向运动状态为后退,左转的反向运动状态为右转)RSk作为当前ZD-2017煤矿探测机器人的运动状态,DSP控制ZD-2017煤矿探测机器人的运动,并记录此时编码器相应的增量值Reik,使Reik逐渐逼近Eeik的负值。
(5) 当编码器的增量值Reik=-Eeik时,ZD-2017煤矿探测机器人基于编码器的回撤运动状态结束。
(6) 根据激光传感器的扫描,利用ICP算法的激光数据配准得到返回时修正以后的相对变化量![]() 把正向相对变量
把正向相对变量![]() 取相反的相对变量,即为
取相反的相对变量,即为![]() 使用ICP算法,通过比较
使用ICP算法,通过比较![]() 与
与![]() 来调整ZD-2017煤矿探测机器人的位置和方向角。
来调整ZD-2017煤矿探测机器人的位置和方向角。
首先配准x方向,使得
(1)
式中TH1为x方向的调节参数。
从式(1)可看出,当前ZD-2017煤矿探测机器人在x方向的位置与已经记录的位置相匹配,在此调节过程中,机器人的动作以式(1)中左侧的值减小为标准。
然后配准y方向,使得
(2)
式中TH2为y方向的调节参数。
从式(2)可看出,当前ZD-2017煤矿探测机器人在y方向的位置与已经记录的位置相匹配,在此调节过程中,机器人的动作以式(2)中左侧的值减小为标准。
最后配准θ方向角,使得
(3)
式中TH3为θ方向角的调节参数。
从式(3)可看出,当前ZD-2017煤矿探测机器人的方向角与已经记录的方向角相匹配,在此调节过程中,机器人的动作以式(3)中左侧的值减小为标准。
(7) 如果满足步骤(6)中的式(1)—式(3),或者调节时间超过所设置的最大调节时间值Tmax,则k-1,跳转到步骤(4),ZD-2017煤矿探测机器人将进行下一步的回撤动作,直到堆栈中的数据全部弹出,即k=0,停止回撤动作,或回撤到无线控制信号恢复正常的位置时,操作人员直接通过手操盒对机器人进行控制。
4 测试结果分析
为了检验本文所设计的ZD-2017煤矿探测机器人的中继器弹射系统和失去信号时自动回撤功能的效果,选择尺寸为15 000 mm×10 000 mm的矩形试验场地 (图6所示的矩形OABC)进行测试。ZD-2017煤矿探测机器人在探测阶段,从起始位置S出发,共行进4 500 mm,在此期间,进行多次前进、左转和右转运动并弹射3个与中继器固连的中继器模块支撑架来延长其通信距离,与此同时,通过传感器所收集的数据记录中心的运动轨迹。当操作人员控制机器人沿着试验场地逆时针运动到终点位置E时,将3个被弹射出的中继器关闭,此时,机器人的控制信号被中断,启动自动回撤功能,回撤到起始位置。如果ZD-2017煤矿探测机器人单独依据编码器所收集的数据信息来进行回撤,测试所记录的运动轨迹,如图6(a)所示;而在初始运动路径相同的情况下,以编码器所记录的数据为基础,并利用激光传感器所收集的数据进行ICP算法配准运动相对变化量qk,进而利用ICP算法进行![]() 与
与![]() 的匹配,调整ZD-2017煤矿探测机器人的位置和方向角,并且设定TH1=15 mm,TH2=15 mm,TH3=0.5°,Tmax=100 s,机器人实现自动回撤时,其中心的运动轨迹如图6(b)所示。回撤完成后,ZD-2017煤矿探测机器人返回到起始点S附近的R点。比较ZD-2017煤矿探测机器人在R点的位姿和在起始点S的位姿可得,图6(a)中机器人返回时的位姿误差为(567 mm,-369 mm,3.3°),而图6(b)中返回时的位姿误差为(128 mm,83 mm,-0.8°),相对于图6(a),图6(b)中机器人回撤的纵向位置误差减小77.4%,横向位置误差减小77.5%,转角误差减小75.8%,回撤精度明显提高。此外,在该测试中,中继器弹射系统能够很好地将固连中继器的支撑架弹射到机器人所行轨迹外,确保延长机器人通信距离的同时,不会干涉到机器人的正常运动。
的匹配,调整ZD-2017煤矿探测机器人的位置和方向角,并且设定TH1=15 mm,TH2=15 mm,TH3=0.5°,Tmax=100 s,机器人实现自动回撤时,其中心的运动轨迹如图6(b)所示。回撤完成后,ZD-2017煤矿探测机器人返回到起始点S附近的R点。比较ZD-2017煤矿探测机器人在R点的位姿和在起始点S的位姿可得,图6(a)中机器人返回时的位姿误差为(567 mm,-369 mm,3.3°),而图6(b)中返回时的位姿误差为(128 mm,83 mm,-0.8°),相对于图6(a),图6(b)中机器人回撤的纵向位置误差减小77.4%,横向位置误差减小77.5%,转角误差减小75.8%,回撤精度明显提高。此外,在该测试中,中继器弹射系统能够很好地将固连中继器的支撑架弹射到机器人所行轨迹外,确保延长机器人通信距离的同时,不会干涉到机器人的正常运动。
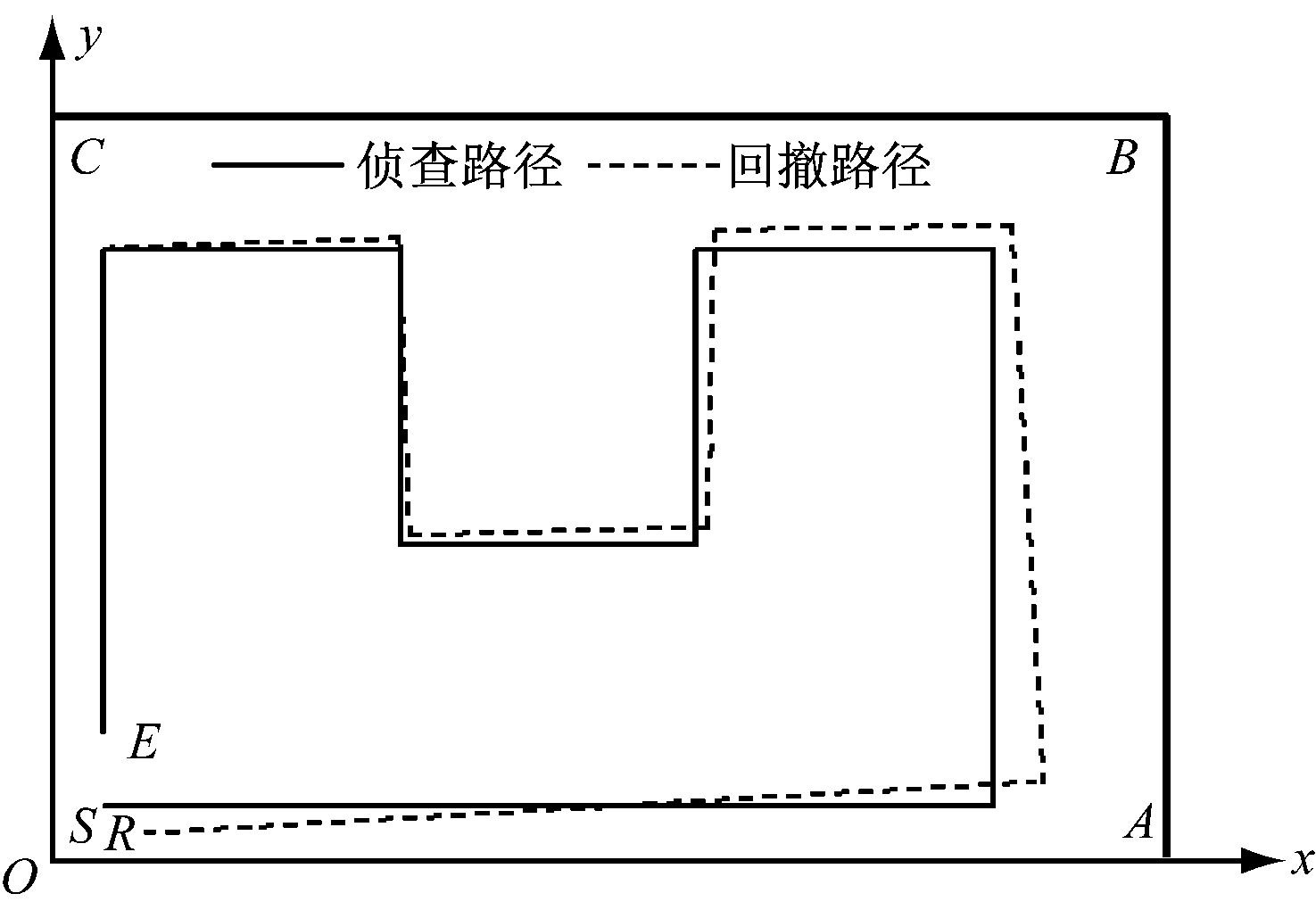
(a) 仅根据编码器数据实现回撤
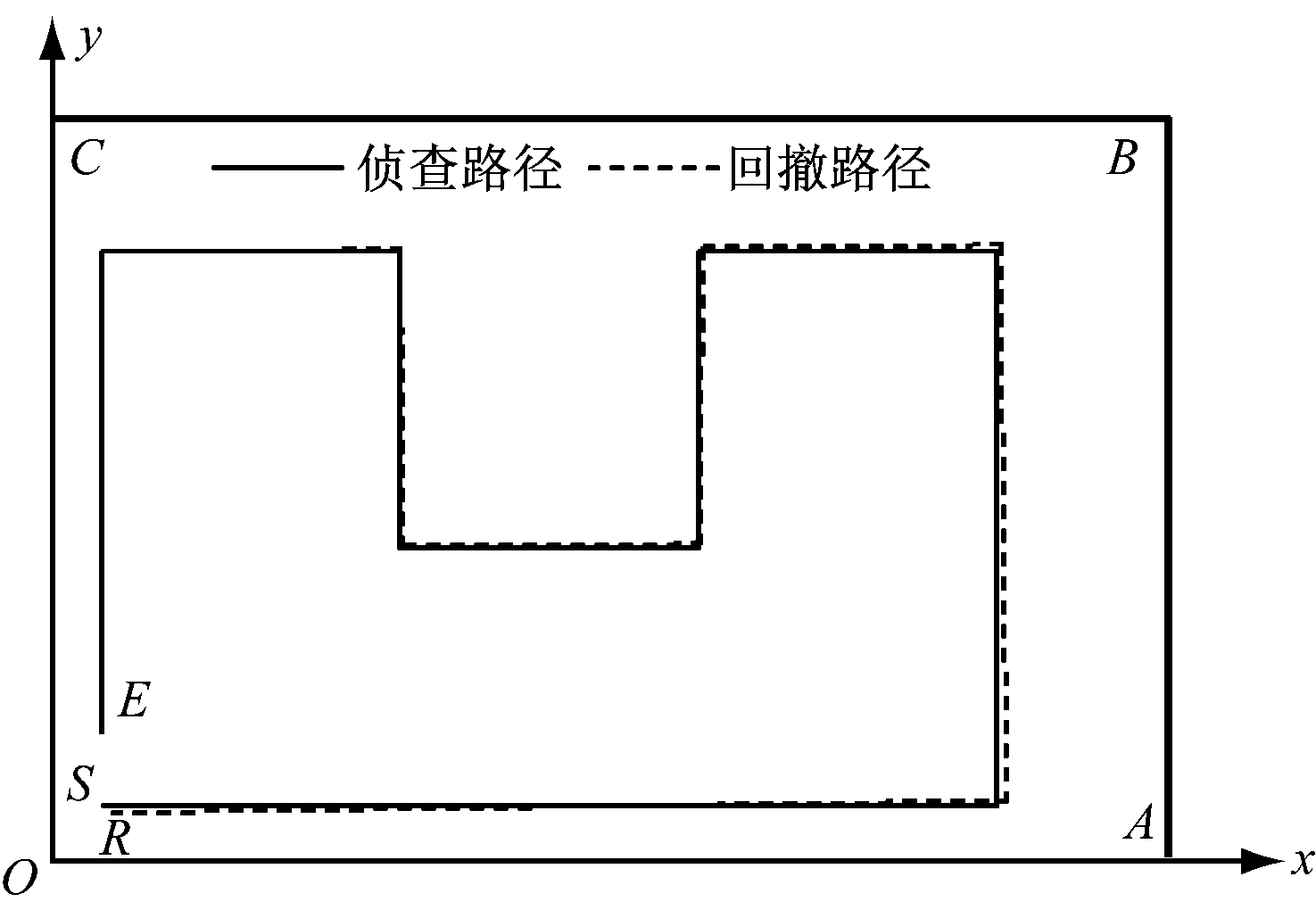
(b) 采用本文算法实现回撤
图6 自动回撤试验
Fig.6 Automatic returning test
图6(a)中,ZD-2017煤矿探测机器人的自动回撤仅仅依据编码器所采集的数据,未结合外部环境信息,因此产生较大的累积误差。在图6(b)中,采用编码器与激光传感器集成数据的方法,且基于ICP算法进行双重数据匹配来逐步调整机器人的位置和方向角,避免了由于仅仅依靠编码器获得的位置信息带来的较大累积误差。本文所设计机器人的优点在于通过中继器弹射系统来延长自身的通信距离,当信号突然中断时,机器人可以启动自动回撤功能,经过相对简便的计算就可以实现较为快速、精确的自动回撤。但由于试验场地的限制,后续需要在井下模拟巷道做进一步的试验,以便检测当路况中加入台阶、斜坡时,ZD-2017煤矿探测机器人的相关功能是否依旧稳定。
5 结语
ZD-2017煤矿探测机器人通过应用中继器弹射系统来延长通信距离,从而拓展了作业范围。当控制信号突然中断时,ZD-2017煤矿探测机器人可利用自动回撤功能快速、精确地回撤到具有信号的安全位置。测试结果表明,ZD-2017煤矿探测机器人可以在未知的环境中稳定、安全地完成自动回撤功能,为煤矿救援机器人的应用实践提供了必备的条件。
参考文献(References):
[1] 孙继平.煤矿安全生产监控与通信技术[J].煤炭学报,2010,35(11):1925-1929.
SUN Jiping.Technologies of monitoring and communication in the coal mine[J].Journal of China Coal Society,2010,35(11):1925-1929.
[2] 孙继平,钱晓红.2004—2015年全国煤矿事故分析[J].工矿自动化,2016,42(11):1-5.
SUN Jiping,QIAN Xiaohong.Analysis of coal mine accidents in China during 2004-2015 [J].Industry and Mine Automation,2016,42(11):1-5.
[3] 巩固,朱华.煤矿救援机器人环境目标图像识别[J].工矿自动化,2017,43(7):7-11.
GONG Gu,ZHU Hua.Environmental target image recognition of coal mine rescue robot [J].Industry and Mine Automation,2017,43(7):7-11.
[4] 赵熊,李一平,阎述学.面向无缆水下机器人水下对接的轨迹跟踪控制[J].科学技术与工程,2017,17(22):88-93.
ZHAO Xiong,LI Yiping,YAN Shuxue.Path following control for autonomous underwater vehicle underwater docking[J].Science Technology and Engineering,2017,17(22):88-93.
[5] WANG Jinhua.Development and prospect on fully mechanized mining in Chinese coal mines[J].International Journal of Coal Science & Technology,2014,1(3):253-260.
[6] 王勇,朱华,王永胜.煤矿救灾机器人研究现状及需要重点解决的技术问题[J].煤矿机械,2007,28(4):107-109.
WANG Yong,ZHU Hua,WANG Yongsheng.Current status and technical problems in research of coal mine rescue robot[J].Coal Mine Machinery,2007,28(4):107-109.
[7]HIROSE S,FUKUSHIMA E F.Development of mobile robots for rescue operations[J].Advanced Robotics,2002,16(6):509-512.
[8] MIN H Q,CHEN H,LUO R H.Active particle in MCL:an evolu-tionary view[C]//Proceeding of the IEEE International Conference on Information and Automation,2009:1087-1092.
[9] 陈焕,闵华清,罗荣华,等.基于遗传迭代最近点算法的激光数据配准[J].计算机测量与控制,2010,18(1):168-171.
CHEN Huan,MIN Huaqing,LUO Ronghua,et al.Data matching based on genetic iterative closest point algorithm[J].Computer Measurement & Control,2010,18(1):168-171.
[10] TIAN Zijian,ZHANG Liya,CHEN Wei.Improved algorithm for navigation of rescue robots in underground mines[J].Computers and Electrical Engineering,2013,39(4):1088-1094.
[11] MARCO A C,VICTOR A R,URIEL H B.Mobile robot path planning using artificial bee colony and evolutionary programming[J].Applied Soft Computing,2015,30:319-328.
[12] NIZAR H A,FARAH M A.Path planning of an autonomous mobile robot using directed artificial bee colony algorithm[J].International Journal of Computer Applications,2014,96(11):11-16.
[13] 李雨潭,朱华,高志军,等.履带机器人通用地面力学模型分析与底盘设计[J].哈尔滨工程大学学报,2015,36(8):1127-1130.
LI Yutan,ZHU Hua,GAO Zhijun,et al.An universal terra mechanics model and the chassis design of a tracked robot[J].Journal of Harbin Engineering University,2015,36(8):1127-1130.
[14] WONG J Y.Development of high-mobility tracked vehicles for over snow operations[J].Journal of Terramechanics,2009,46(4):141-155.