0 引言
采煤机滚筒调高控制是采煤机自动化、远程控制和在线监测监控关键技术之一,采煤机摇臂角度是实现滚筒调高的重要参数。现阶段国内采煤机滚筒定位大多基于位移传感器检测技术,采用采煤机摇臂角度位移传感器或调高油缸行程位移传感器进行检测[1]。这种接触式测量方法在矿井复杂环境下应用存在磨损严重、故障率高的问题,且部分测试方案的测量结果容易受机身前后倾斜等因素的影响。针对以上问题,本文提出了一种低照度环境下采煤机摇臂角度测量方法,将图像增强算法与单目视觉相结合,对采煤机摇臂角度进行非接触式测量。
现有矿井低照度视频图像增强算法主要有直方图均衡化、基于人体视觉的多尺度Retinex(Multi-Scale Retinex,MSR)算法、双边滤波和导向滤波算法[2]。直方图均衡化方法在提升对比度的同时容易放大噪声,使图像失真[3]。多尺度Retinex算法易在明暗对比强烈处产生光晕,造成梯度突变区域的照度估计失真,使得边缘保持性较差[4]。双边滤波可以很好地去除低频噪声,但在高频噪声中容易丢失图像细节,不利于边缘特征提取[5-7]。经过对比分析多种图像增强算法,本文采用一种基于导向滤波的MSR图像增强算法,该算法利用导向滤波对入射分量进行照度估计,并与原图像进行差运算得到反射分量,使用非线性变换进行边缘细节增强,最后经过反对数变换得到增强图像。这样可以很大程度上消除煤矿井下低照度、低对比度等因素的影响,增强图像边缘特征,提高角度测量的准确性。在此基础上,利用单目视觉角度测量方法得到采煤机摇臂角度,进而确定采煤机滚筒高度。
1 采煤机摇臂角度测量原理
采煤机摇臂角度测量原理如图1所示。使用已标定好的CCD摄像机对采煤机摇臂进行视频采集,将采集的视频帧传入Raspberry pi 3,进行视频帧图像增强处理和角度实时测量;将测量的角度转换为输出信号进行反馈,通过反馈信号计算滚筒调节高度;控制器作用在调高油缸活塞上带动小摇臂,小摇臂带动大摇臂,实现滚筒调高。采煤机滚筒高度H与采煤机摇臂角度θ的关系为
H=lsinθ
(1)
式中l为摇臂长度。
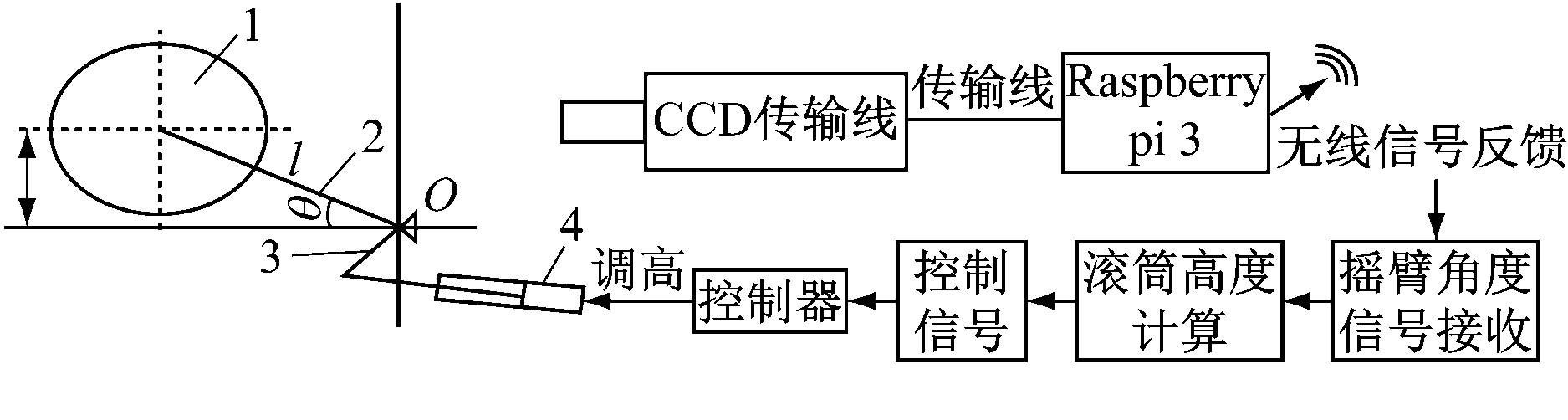
1-滚筒;2-摇臂;3-小摇臂;4-调高油缸
图1 采煤机摇臂角度测量原理
Fig.1 Principle of angle measurement of shearer rocker
采用张正友标定法[8]在线性摄像机模型下对单目CCD摄像机进行标定,获取摄像机内外参数。CCD摄像机标定后可确立世界坐标、摄像机坐标、图像物理坐标、图像像素坐标之间的相互关系。以CCD摄像机的光心点与其垂直投影到世界坐标系中地面上点的连线为Z轴,地面上相互垂直的2个向量分别为世界坐标系的X轴、Y轴,X,Y,Z三个坐标轴的交点为世界坐标系的原点。本文以地面为水平基准面,刮板输送机运输方向为X轴,水平面上与X轴垂直的方向为Y轴。在标定好的场景中,点P的世界坐标[Xw Yw Zw]T与其摄像机坐标[XC YC ZC]T对应的关系为
(2)
式中U,T分别为摄像机的外部参数旋转矩阵和平移向量。
2 图像增强算法
根据MSR算法理论,给定的一幅图像S(x,y)可以分解为2幅不同的图像:入射光图像L(x,y)和反射物体图像R(x,y),分解公式为
S(x,y)=R(x,y)L(x,y)
(3)
采用MSR算法时,在明暗对比强烈处会产生光晕,边缘保持性较差。为了保持良好的边缘特征,增强图像细节和图像层次感,使用导向滤波[9]作为中心环绕函数对图像进行照度估计[10],再进行非线性变换(对数变换)[11]。基于导向滤波的MSR图像增强算法[12-13]表达式为
(4)
式中:n为尺度数;ωi为尺度权重;Fi(x,y)为中心环绕函数;“*”表示卷积操作;底数d默认为e。
经过照度估计后的图像边缘细节不突出、亮度不足,因此,使用非线性变换进行局部对比度增强,同时补偿照度,增强暗部细节、图像边缘特征和图像层次感。非线性变换公式为
s=clogd(1+m)
(5)
式中:s为变换后图像的灰度分量;c为尺度比例常数;m为输入图像的灰度分量,m≫0。
遍历图像,计算每个像素点的非线性变换,再进行归一化处理。
3 采煤机摇臂角度测量方法
用图像增强算法对低照度原图处理后得到识别度较高的图像,通过NumPy数组的索引访问原始像素,设置并提取感兴趣区域(Region of Interest,ROI),然后对ROI进行图像角度测量。通过对ROI进行边缘检测[14]、二值化、霍夫变换,获取采煤机摇臂边缘直线的斜率并进行角度计算。
边缘检测的目的是识别图像中亮度变化剧烈的像素点的集合,一般分为以一阶微分、二阶微分和混合一阶、二阶微分为基础的三类[15]。Canny算子是以二阶微分为基础的边缘检测,检测性能好,应用范围广,符合最优边缘检测的标准,运行时间较短,因此本文采用Canny算子进行边缘检测。
霍夫变换是一种特征提取技术,不受图形旋转的影响[16]。累计概率霍夫变换(Progressive Probabilistic Hough Transform,PPHT)是标准霍夫变换的改进,它在一定范围内进行霍夫变换,计算单个线段的方向及范围,可减少计算量,缩短计算时间。OpenCV中提供的PPHT函数为cv2.HoughLinesP()。本文采用PPHT检测一条直线的多条线向量,计算每条线向量的斜率,再用反正切函数进行角度变换,得出每个线向量的角度,最后对多个角度求平均值,以保证检测角度的准确性。
4 实验结果及分析
4.1 图像增强算法效果对比
实验设备:Raspberry pi 3,型号为MV-EM200的工业CCD摄像机,三脚架。运行环境:Anaconda3+Python+OpenCV。在实验室条件下,将工业CCD摄像机安装在采煤机对面进行摄像机标定,采集采煤机摇臂图像。分别在2种光照条件下采集2组视频,然后取2组视频序列中采煤机摇臂相同位置的2帧图像,调整像素为640×480。图2分别为正常照度和低照度下采集的2组图像。
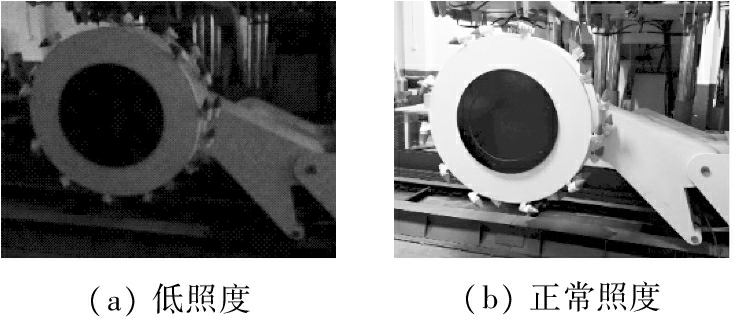
图2 正常照度和低照度下的采煤机摇臂图像
Fig.2 Images of shearer rocker under normal illumination and low illumination
对比可知,低照度下采煤机摇臂图像存在亮度低、对比度差及噪声多的特点。分别利用直方图均衡化、导向滤波、基于双边滤波的MSR算法、基于导向滤波的MSR算法对低照度图像进行增强,并从主观视觉效果和客观评价指数2个方面进行比较。相关参数设置如下:n=3,权重ωi均值为1/3,c=1.2,滤波窗口半径r=10,正则化参数ε=10-5,r,ε为引导滤波调节器滤波效果的重要参数;σs=20,σr=5,σs与σr代表空间相似度及颜色范围相似度的灵敏性。实验结果如图3所示,其中图3(f)—图3(j)分别为图3(a)—图3(e)的ROI提取结果。4种算法处理结果的直方图如图4所示。
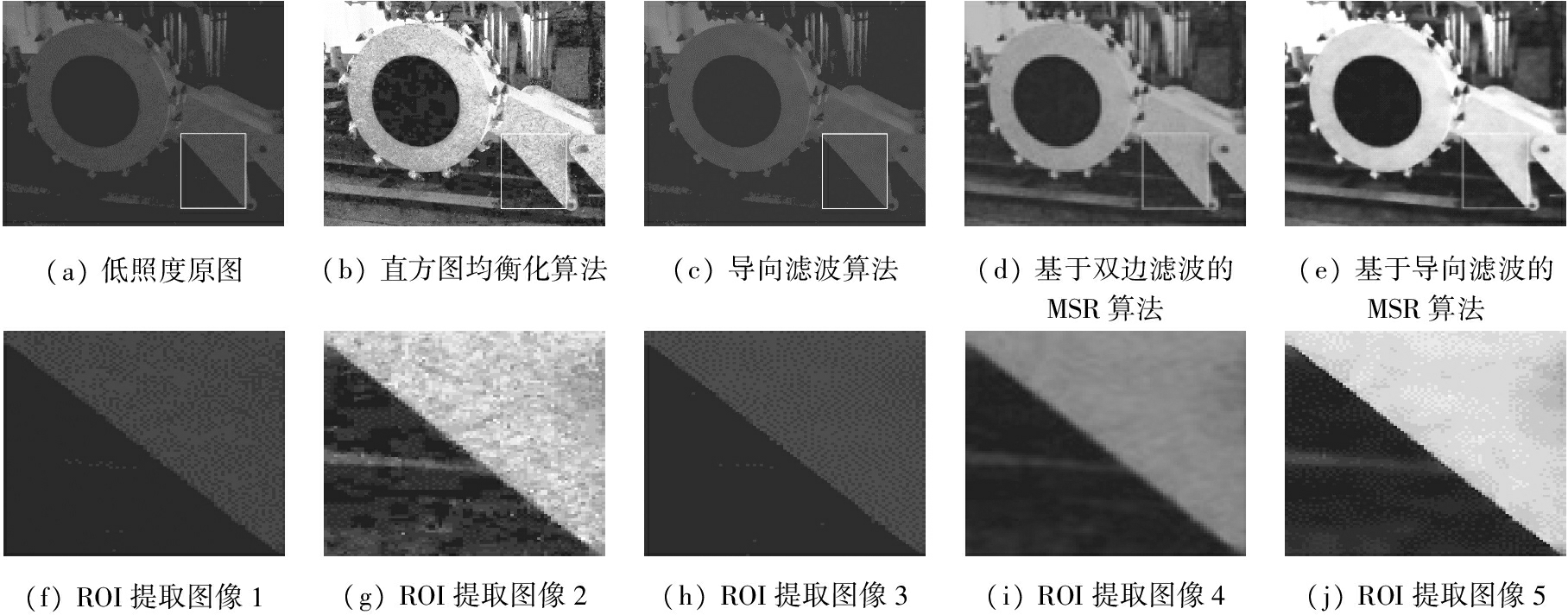
图3 不同图像增强算法处理效果对比
Fig.3 Comparison of effect of different image enhancement methods
由图3可知,虽然4种算法都对图像的暗区域进行了增强,但通过主观感觉可以看出各种算法的图像增强效果的差异。图3(g)提高了对比度,但图像噪声较大,失真比较严重,视觉效果不好;图3(h)比较平滑,噪声去除比较明显,但图像整体较暗,效果一般;图3(i)在亮度、去噪方面有所改善,但仍存在照度偏暗、图像边缘细节模糊现象;图3(j)层次感明显,边缘具有平滑性、锐化性,且细节和边缘信息保留完整,视觉效果较好。
从直方图分布来看,图4(a)的灰度值主要集中在暗区且灰度值分布不均匀;图4(c)、(d)的灰度值分布改善较小;图4(b)、(e)的灰度值分布较均匀,反映在图像上,暗区域亮度都得到了增强,但后者具有较高的对比度,细节更清楚。

图4 不同图像增强算法处理直方图效果对比
Fig.4 Comparison of histogram of different image enhancement methods
采用对比度、峰值信噪比(PSNR)、边缘保护指数(EPI)和运行时间作为评价指标,4种算法的图像增强质量性能评价参数见表1。对比度可以很好地表现图像的灰度层次。PSNR反映的是增强后图像的失真程度,其值越大,失真程度越低。EPI反映的是图像边缘和细节的突出程度,其值越大,说明边缘和细节越清晰。
表1 不同图像增强算法评价参数
Table 1 Evaluation parameters of different image enhancement methods
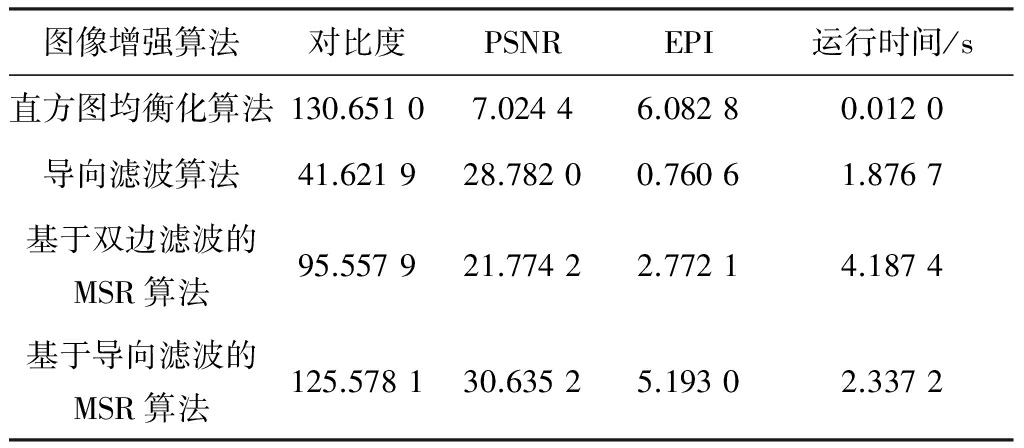
由表1可知,直方图均衡化算法的EPI出现反常,在其PSNR值较小的情况下,EPI异常高,原因是直方图均衡化后的图像噪声较大,用EPI进行评价时,将噪声当作边缘信息保留了下来。直方图均衡化算法的图像增强效果不理想,但在运行时间和对比度上具有明显优势。从PSNR看,导向滤波算法具有较好的保真效果,但边缘保护效果不突出。基于双边滤波的MSR算法EPI较低,说明对细节信息的辨认度低。基于导向滤波的MSR算法在对比度、PNSR和EPI上都表现出较好的优势:EPI较高,说明图像边缘突出,细节信息识别度高;PNSR高,说明保真效果好;另外,运行时间较短,综合效果较好。
4.2 角度测量误差分析
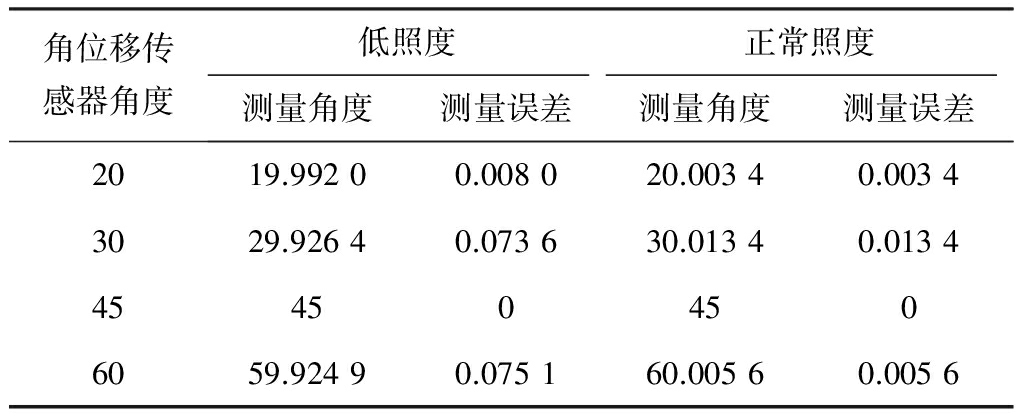
对采用基于导向滤波的MSR算法处理后的图像进行采煤机摇臂角度测量,对提取的ROI图像采用二值化、Canny边缘检测、PPHT处理,结果如图5所示。为了更好地验证所提方法的精度和可行性,采用角位移传感器分别将采煤机摇臂调到不同的角度,在低照度和正常照度下进行采煤机摇臂角度测量,结果见表2。测量结果表明,在低照度情况下,4组测量结果的误差均不超过0.1°,最大误差为0.075 1°,相比正常照度下的测量结果,误差稍大,但2种照度情况下的测量误差均在采煤机滚筒调高所允许的误差范围之内。
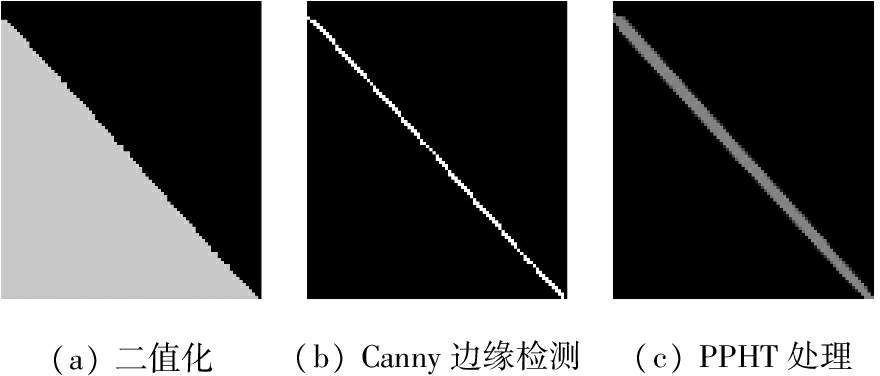
图5 ROI图像处理结果
Fig.5 ROI image processing rusult
表2 2种照度下采煤机摇臂角度测量结果
Table 2 Measurement results of shearer rocker angle under two kinds of illuminance (°)
5 结论
(1) 提出了一种低照度环境下采煤机摇臂角度测量方法,该方法将图像增强算法与单目视觉相结合,对采煤机摇臂角度进行非接触式测量。
(2) 采煤机摇臂角度测量方法采用了基于导向滤波的MSR图像增强算法,该算法使用导向滤波作为中心环绕函数对图像进行照度估计,再进行非线性变换。分别从主观视觉效果和客观质量评价2个方面比较各种图像增强算法的性能,结果表明,基于导向滤波的MSR算法提高了图像的对比度和信噪比,突出了图像的细节和边缘信息,提高了运算效率。
(3) 基于单目视觉的采煤机摇臂角度测量是非接触式直接测量,避免了接触式测量方法的误差随着滚筒高度的增加而增大的问题。实验证明,所提方法角度测量误差小于0.1°,满足应用要求。
参考文献(References):
[1] 孙月华,曹贺.采煤机记忆截割滚筒高度的检测模型[J].黑龙江科技大学学报,2017,27(2):114-117.
SUN Yuehua,CAO He.Height detection model of shearer memory cutting drum[J].Journal of Heilongjiang University of Science and Technology,2017,27(2):114-117.
[2] 刘晓阳,乔通,乔智.基于双边滤波和Retinex算法的矿井图像增强方法[J].工矿自动化,2017,43(2):49-54.
LIU Xiaoyang,QIAO Tong,QIAO Zhi.Image enhancement method of mine based on bilateral filtering and Retinex algorithm[J].Industry and Mine Automation,2017,43(2):49-54.
[3] KHAN M F,KHAN E,ABBASI Z A.Image contrast enhancement using normalized histogram equalization[J].Optik-International Journal for Light and Electron Optics,2015,126(24):4868-4875.
[4] 姬伟,吕兴琴,赵德安,等.苹果采摘机器人夜间图像边缘保持的Retinex增强算法[J].农业工程学报,2016,32(6):189-196.
JI Wei,LYU Xingqin,ZHAO De'an,et al.Edge-preserving Retinex enhancement algorithm of night vision image for apple harvesting robot[J].Transactions of the Chinese Society of Agricultural Engineering,2016,32(6):189-196.
[5] 田小平,姜薇,吴成茂.基于双边滤波的低亮度图像增强算法[J].西安邮电大学学报,2016,21(4):43-47.
TIAN Xiaoping,JIANG Wei,WU Chengmao.Low luminance image enhancement based on bilateral filtering[J].Journal of Xi'an University of Posts and Telecommunications,2016,21(4):43-47.
[6] ZHANG Y,WANG X,PENG L.Text based bilateral filter for color image edge preserving[C]//IEEE International Conference on Broadband Network & Multimedia Technology,2014:49-52.
[7] YIN J,LI H,DU J,et al.Low illumination image Retinex enhancement algorithm based on guided filtering[C]// IEEE International Conference on Cloud Computing and Intelligence Systems,2015:639-644.
[8] CHAPERON T,DROULEZ J,THIBAULT G.Reliable camera pose and calibration from a small set of point and line correspondences:a probabilistic approach[J].Computer Vision & Image Understanding,2011,115(5):576-585.
[9] HE K M,SUN J,TANG X O.Guided image filtering[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2013,35(6):1397-1409.
[10] 程德强,郑珍,姜海龙.一种煤矿井下图像增强算法[J].工矿自动化,2015,41(12):31-34.
CHENG Deqiang,ZHENG Zhen,JIANG Hailong.An image enhancement algorithm for coal mine underground[J].Industry and Mine Automation,2015,41(12):31-34.
[11] 朱伟.OpenCV图像处理编程实例[M].北京:电子工业出版社,2016.
[12] 智宁,毛善君,李梅.基于照度调整的矿井非均匀照度视频图像增强算法[J].煤炭学报,2017,42(8):2190-2197.
ZHI Ning,MAO Shanjun,LI Mei.Enhancement algorithm based on illumination adjustment for non-uniform illuminance video images in coal mine[J].Journal of China Coal Society,2017,42(8):2190-2197.
[13] 方帅,杨静荣,曹洋,等.图像引导滤波的局部多尺度Retinex算法[J].中国图象图形学报,2012,17(7):11-18.
FANG Shuai,YANG Jingrong,CAO Yang,et al.Local multi-scale Retinex algorithm based on guided image filtering[J].Journal of Image and Graphics,2012,17(7):11-18.
[14] 赵谦,王奕婷,曾召华,等.一种矿井巷道图像边缘检测算法[J].工矿自动化,2013,39(2):71-75.
ZHAO Qian,WANG Yiting,ZENG Zhaohua,et al.An edge detection algorithm for mine roadway image[J].Industry and Mine Automation,2013,39(2):71-75.
[15] 吴翔,于微波,马艳辉,等.一种新的改进Canny图像边缘检测算法[J].影像科学与光化学,2016,34(1):116-121.
WU Xiang,YU Weibo,MA Yanhui,et al.A new improved Canny image edge detection algorithm[J].Photographic Science and Photochemistry,2016,34(1):116-121.
[16] 刘菁欣,白云,王俊.改进霍夫变换的枢纽立交桥检测方法[J].测绘科学,2016,41(10):136-141.
LIU Jingxin,BAI Yun,WANG Jun.Research on hinge flyovers detection method based on Hough transformation[J].Science of Surveying and Mapping,2016,41(10):136-141.