0 引言
新修订的2016年版《煤矿安全规程》要求所有矿井必须装备矿井人员定位系统[1-4]。矿井人员定位系统在遏制煤矿井下超定员生产和煤矿井下作业人员管理等方面发挥着重要作用[5]。但现有煤矿井下人员定位系统定位精度低,定位误差大,仅能实现巷道轴向一维定位,难以满足煤矿事故应急救援、运输与机电事故防治等需求[6-8]。因此,迫切需要提高矿井人员定位系统的定位精度,实现煤矿井下人员二维精确定位。
煤矿井下巷道弯曲、分支和倾斜,巷道断面形状和面积变化,巷道围岩介质、表面粗糙度和支护差异,巷道中纵向导体和横向导体,巷道中胶轮车、电机车和机电设备等复杂的巷道环境,决定了煤矿井下人员精确定位应采用基于时间测距的定位方法[9-10],但需要解决时钟同步误差、计时误差、多径效应、非视距传播(Not Line of Sight,NLOS)时延误差等问题。为提高定位精度,实现煤矿井下人员二维精确定位,笔者提出了基于卡尔曼滤波的矿井人员二维精确定位方法。
1 基于时间测距的定位方法精度的影响因素
1.1 时钟同步误差与计时误差
实际的基于时间测距的定位方法中,每个定位分站和定位卡时钟不可能完全同步,时钟速率也不可能完全一样,这必将影响测距精度。
煤矿井下单一巷道长度达10余千米,传输时延长。通过地面中心站授时等方式实现定位分站之间,或定位分站与定位卡之间,或定位卡之间的时间同步十分困难,定位分站和定位卡成本高,时间误差大。
计时误差是由定位分站和定位卡的计时器晶体振荡器存在频率偏移造成的。在一个计时时段T内的计时误差Δt为
(1)
式中:f为计时器晶体振荡器精确时钟频率;Δf为计时器晶体振荡器频率偏移。
基于到达时间(Time of Arrival,TOA)的定位方法通过监测定位分站与定位卡之间的无线信号传播时间,用该时间乘以无线信号传播速度(无线电信号传播速度为光速),得到定位分站与定位卡之间的距离。因此,TOA定位方法需要定位分站与定位卡时钟同步并计时精确[9-10]。定位分站与定位卡时钟同步误差和时钟计时误差均会影响TOA定位精度。
基于到达时间差(Time Difference of Arrival,TDOA)的定位方法通过监测定位卡发送的信号到达两邻近定位分站的时间差,用该时间差乘以无线信号传播速度(无线电信号传播速度为光速),得到定位卡与两邻近定位分站之间的距离差。因此,TDOA定位方法需要定位分站之间时钟同步并计时精确[9-10]。定位分站时钟同步误差和时钟计时误差均会影响TDOA定位精度。
双程测距(Two-Way Ranging,TWR)定位方法和双边双程测距 (Symmetric Double-Sided Two-Way Ranging,SDS-TWR)定位方法是TOA定位方法的改进方法,既不需要定位分站与定位卡之间时钟同步,也不需要定位分站之间时钟同步,更不需要定位卡之间时钟同步。但TWR和SDS-TWR定位方法需要定位分站和定位卡时钟计时精确[9-10]。定位分站和定位卡时钟计时误差均会影响TWR和SDS-TWR定位方法的定位精度。
需要定位分站与定位卡时钟同步的TOA定位方法和需要定位分站之间时钟同步的TDOA定位方法不宜用于煤矿井下人员精确定位[9-10]。TWR和SDS-TWR定位方法适用于煤矿井下人员精确定位[9-10],但需解决定位分站与定位卡计时误差对定位精度的影响问题。
1.2 多径效应
多径效应是指同一信号沿2条或2条以上路径传播后,各路信号以微小的时间差到达接收设备,接收天线按各路信号的相位、强度等进行相互叠加,使得原信号失真。例如,无线电信号沿长度正好相差半个波长的2条路径传播,2路信号到达接收天线时会发生波峰与波谷重合、相互抵消的现象。煤矿井下巷道狭窄、表面高低不平,多径效应十分严重,严重影响基于时间测距的定位方法的测距精度。
1.3 NLOS时延误差
无线电信号传播过程中受到障碍物阻挡,将无法直射传播,而通过反射等方式进行非视距传播会产生NLOS时延。煤矿井下巷道分支、弯曲和倾斜,巷道中胶轮车、电机车和机电设备等均可造成NLOS时延[11-12],使测量到的定位卡与定位分站间的距离比实际距离远。
1.4 电磁骚扰
煤矿井下无线通信和无线传输设备,架线电机车架空线与受电弓接触电火花,采煤机、掘进机、带式输送机等大型机电设备启停等会产生电磁骚扰,并影响无线电测距。
通过上面分析可以看出,基于时间测距的煤矿井下人员定位方法的定位精度受时钟同步误差、计时误差、多径效应、NLOS时延误差和电磁骚扰等影响,难以实现煤矿井下人员二维精确定位。
2 卡尔曼滤波原理
卡尔曼滤波是一种基于概率论和数理统计[13]的优化自回归数据处理算法[14],采用由状态方程和测量方程组成的线性随机系统的状态空间模型来描述滤波器,并利用状态方程的递推性,以有限时间的数据作为计算依据,按线性无偏最小均方误差估计准则,采用一套递推算法对滤波器的状态变量作最佳估计,从而求得有用信号的最佳估计[13,15]。测量方程的测量数据中包括系统中的噪声和干扰的影响,所以最佳估计也被看作是滤波过程。卡尔曼滤波的工作原理如图1所示[14]。X0为初始状态,P0为初始状态的协方差。
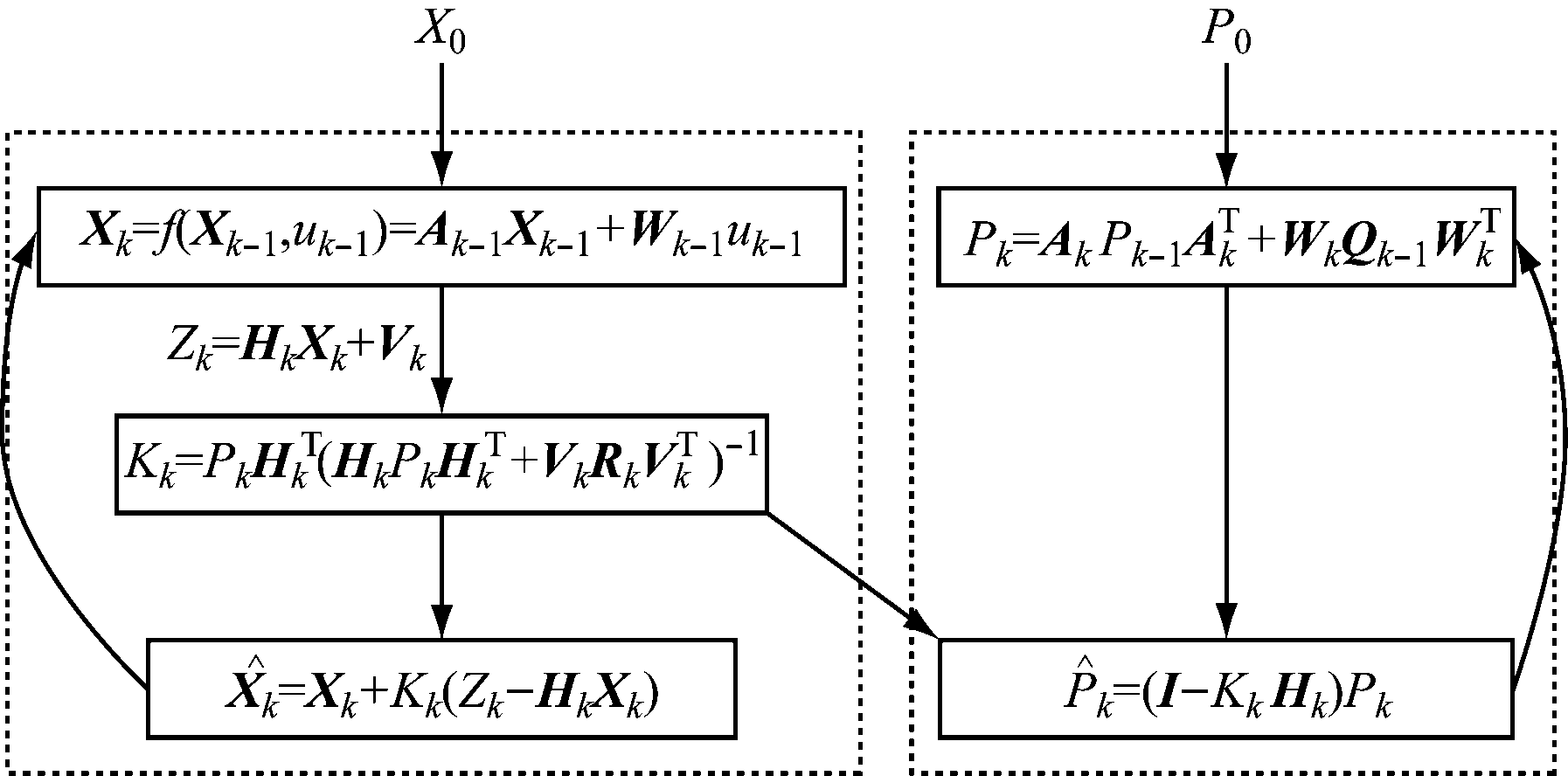
图1 卡尔曼滤波的工作原理
Fig.1 Working principle of Kalman filter
卡尔曼滤波有5个重要方程[14]:状态方程(卡尔曼滤波的系统状态数学模型)、系统误差的协方差方程、卡尔曼增益[14,16]方程、k时刻的最优化值的更新方程、k时刻的协方差![]() 的更新方程。
的更新方程。
状态方程为
Xk=f(Xk-1,uk-1)=Ak-1Xk-1+Wk-1uk-1
(2)
式中:Xk为根据k-1时刻预测的k时刻的状态;uk-1为数据模型的系统噪声序列;Ak-1为转移矩阵;Wk-1为系统噪声驱动矩阵。
系统误差的协方差方程为
(3)
式中:Pk为k时刻系统状态的协方差;Qk-1为k-1时刻的系统噪声序列的协方差矩阵。
根据状态方程式(2),可以更新k时刻系统状态的协方差Pk。
通过大量测量,可以得到测量方程为
Zk=HkXk+Vk
(4)
式中:Hk为测量矩阵;Vk为测量噪声序列。
根据式(2)的k时刻状态的预测值和式(4)的k时刻的测量值,对预测值和测量值进行加权平均,这个加权值就是卡尔曼增益Kk,其公式为
(5)
式中Rk为测量噪声序列的协方差矩阵。
k时刻的最优化值![]() 的更新方程为
的更新方程为
(6)
k时刻的协方差![]() 的更新方程为
的更新方程为
(7)
式中I为单位矩阵。
卡尔曼滤波是去除噪声、还原真实数据的一种数据处理技术。卡尔曼滤波在测量值已知的情况下,依据一系列存在测量噪声的数据,动态预测系统的状态。卡尔曼滤波便于计算机编程实现,能够对现场采集的数据进行实时更新和处理,是一种高效有用的算法。卡尔曼滤波被广泛应用于卫星轨道预测、机器人导航、雷达系统、导弹追踪、人脸识别等领域。
3 基于卡尔曼滤波的矿井人员二维精确定位方法
基于卡尔曼滤波的矿井人员二维精确定位方法以定位分站测量到的定位卡到定位分站之间的距离(有测量噪声)作为卡尔曼滤波中的测量结果;根据建立的矿工在井下移动的数学模型推算出定位卡位置,并作为卡尔曼滤波中的预测结果;通过对测量结果和预测结果进行合理加权,根据上一步卡尔曼滤波后的最佳估计值得出当前时刻的最佳估计值,实现煤矿井下人员二维精确定位。
3.1 状态方程
假设在k时刻,定位卡的坐标和速度为
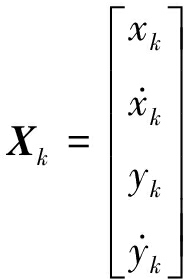
(8)
式中:xk为k时刻x轴上的坐标![]() 为k时刻x轴上的速度;yk为k时刻y轴上的坐标
为k时刻x轴上的速度;yk为k时刻y轴上的坐标![]() 为k时刻y轴上的速度。
为k时刻y轴上的速度。
为简化卡尔曼滤波的数学模型,式(2)可简化为
Xk+1=f(Xk,uk)=AkXk+uk
(9)
式中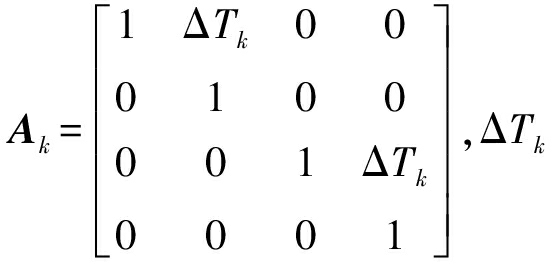 为时间变化长度,可以假设速度
为时间变化长度,可以假设速度![]() 和
和![]() 在ΔTk中是恒定的。
在ΔTk中是恒定的。
下面重点分析二维坐标、速度和加速度的关系,以得到状态方程的关键部分。首先举例说明如何从k时刻的坐标(xk,yk)、速度![]() 加速度
加速度![]() 预测定位卡在k+1时刻的坐标(xk+1,yk+1),如图2所示。
预测定位卡在k+1时刻的坐标(xk+1,yk+1),如图2所示。
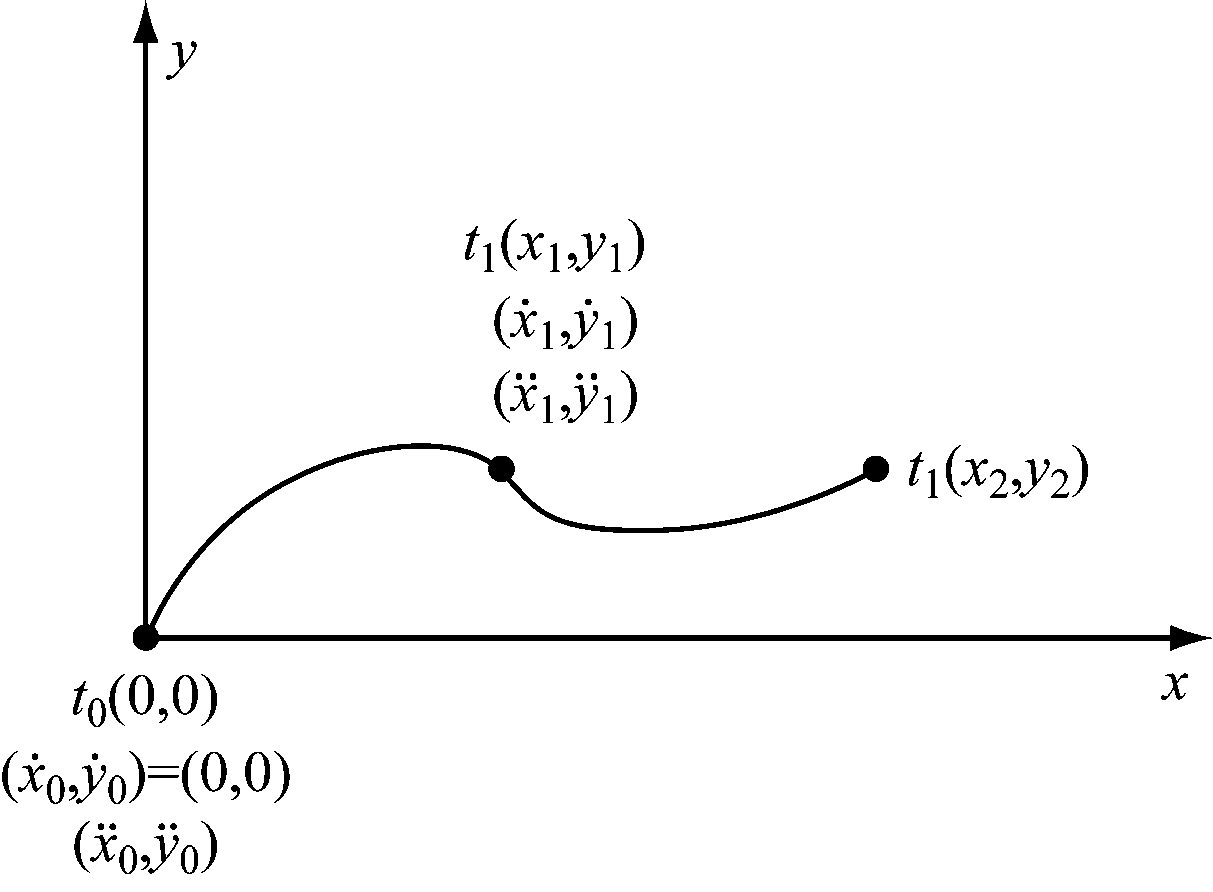
图2 预测定位卡下一时刻位置
Fig.2 Example of predicting position of the next moment
为简化推演过程,设t0=0时定位卡开始运动,此时定位卡的速度![]() 而加速度
而加速度![]() 是非零的,令在t0时刻定位卡的位置坐标为(x0,y0),(x0,y0)=(0,0),根据这些条件,利用式(9)可预测出t1时刻定位卡的坐标(x1,y1)、速度
是非零的,令在t0时刻定位卡的位置坐标为(x0,y0),(x0,y0)=(0,0),根据这些条件,利用式(9)可预测出t1时刻定位卡的坐标(x1,y1)、速度![]()
(10)
式中![]() 为定位卡在t1时刻的预测坐标。
为定位卡在t1时刻的预测坐标。
令t1时刻能够测量与定位卡间距离的定位分站i的坐标为(xi,yi),通过预测坐标与定位分站坐标可计算出定位卡到定位分站的预测距离![]()
在使用卡尔曼滤波之后,可以获得定位卡在t1时刻的相对精确坐标(x1,y1),然后可以更新t1时刻的相对精确速度![]()
(11)
通过式(11)可得
(12)
继续用t1时刻的相对精确坐标(x1,y1)和速度![]() 预测t2时刻的标签坐标(x2,y2)和速度
预测t2时刻的标签坐标(x2,y2)和速度![]()
后续步骤相同,最后推导出:
(13)
3.2 系统误差的协方差方程
式(3)可以简化为![]() 其中Qk为过程噪声,可以视为移动过程中加速度的影响。
其中Qk为过程噪声,可以视为移动过程中加速度的影响。
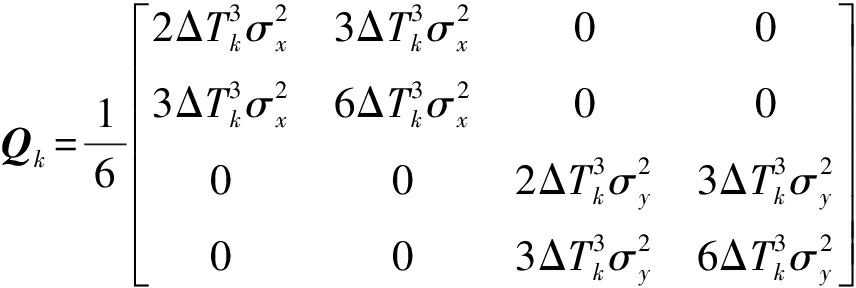
(14)
式中σx,σy分别为x方向、y方向的加速度系数。
根据式(4)可以计算得到定位卡和定位分站间的距离为
(15)
Zi,k+1为定位分站i与定位卡间的测量距离,是测量值。测量噪声始终存在,并且可以假定其等于测量距离和预测距离之间的误差Vk+1。
3.3 更新方程
卡尔曼增益必须满足高斯白噪声,可以根据式(5)计算得出。
比较测量距离Zi,k+1和预测距离![]() 如果差值在卡尔曼增益区域内,那么这个测量距离Zi,k+1可以认为足够精确。然后,通过测量距离Zi,k+1更新预测坐标
如果差值在卡尔曼增益区域内,那么这个测量距离Zi,k+1可以认为足够精确。然后,通过测量距离Zi,k+1更新预测坐标![]() 和误差协方差Pk+1。
和误差协方差Pk+1。
4 结语
卡尔曼滤波是一种对动态系统进行数据处理的有效方法,仅需要根据当前的测量数据(定位分站与定位卡之间的测量距离)与状态方程的估计值,按照递归公式,就可以较好地消除或降低测距过程中的噪声,同时可以较好地预测矿工定位卡的下一步位置。基于卡尔曼滤波的矿井人员二维精确定位方法可以减小时钟同步误差、计时误差、多径效应、NLOS时延误差和电磁骚扰等对定位精度的影响,实现了煤矿井下人员二维精确定位,可满足应急救援、运输和机电事故防治等需求。
参考文献(References):
[1] 国家安全生产监督管理总局,国家煤矿安全监察局.煤矿安全规程[M].北京:煤炭工业出版社,2016.
[2] 孙继平.2016年版《煤矿安全规程》监控与通信条款解析[J].工矿自动化,2016,42(5):1-7.
SUN Jiping. Explanations for part of monitoring and communication ofCoal Mine Safety Regulationsof 2016 edition[J]. Industry and Mine Automation,2016,42(5):1-7.
[3] AQ 1048—2007 煤矿井下作业人员管理系统使用与管理规范[S].
[4] AQ 6210—2007 煤矿井下作业人员管理系统通用技术条件[S].
[5] 孙继平.煤矿井下人员位置监测技术与系统[J].煤炭科学技术,2010,38(11):1-5.
SUN Jiping. Personnel position monitoring technology and system in underground mine[J]. Coal Science and Technology,2010,38(11):1-5.
[6] 孙继平. 互联网+煤矿监控与通信[M].北京:煤炭工业出版社,2016.
[7] 孙继平.煤矿事故特点与煤矿通信、人员定位及监视新技术[J].工矿自动化,2015,41(2):1-5.
SUN Jiping. Characteristics of coal mine accidents and new technologies of coal mine communication,personnel positioning and monitoring [J]. Industry and Mine Automation,2015,41(2):1-5.
[8] 孙继平,钱晓红.煤矿事故与应急救援技术装备[J].工矿自动化,2016,42(10):1-5.
SUN Jiping,QIAN Xiaohong. Coal mine accident and emergency rescue technology and equipment[J].Industry and Mine Automation,2016,42(10):1-5.
[9] 孙哲星. 煤矿井下人员精确定位方法[J]. 煤炭科学技术,2018,46(3):130-134.
SUN Zhexing. Personnel positioning method in underground coal mine [J].Coal Science and Technology,2018,46(3):130-134.
[10] 孙哲星.基于时间测距的矿井人员定位方法研究[J].工矿自动化,2018,44(4):30-33.
SUN Zhexing. Research on mine personnel positioning method based on time range[J].Industry and Mine Automation,2018,44(4):30-33.
[11] 胡青松,张申,吴立新,等.矿井动目标定位:挑战、现状与趋势[J].煤炭学报,2016,41(5):1059-1068.
HU Qingsong,ZHANG Shen,WU Lixin,et al. Localization techniques of mobile objects in coal mines: challenges,solutions and trends[J]. Journal of China Coal Society,2016,41(5):1059-1068.
[12] 孙继平,蒋恩松.基于测距值二次重构的弯曲巷道目标定位方法[J].煤炭学报,2018,43(1):287-294.
SUN Jiping,JIANG Ensong. Target positioning method of curved roadways based on two-reconstructing ranging value[J]. Journal of China Coal Society,2018,43(1):287-294.
[13] 张福荣,自适应卡尔曼滤波在变形监测数据处理中的应用研究[D].西安:长安大学,2009.
[14] WELCH G,BISHOP G. An Introduction to the Kalman filter[R]. Chapel Hill:University of North Carolina at Chapel Hill,2001:127-132.
[15] 杨兆升,朱中. 基于卡尔曼滤波理论的交通流量实时预测模型[J].中国公路学报,1999,12(3):63-67.
YANG Zhaosheng,ZHU Zhong. A real-time traffic volume prediction model based on the Kalman filtering theory[J]. China Journal of Highway and Transport,1999,12(3):63-67.
[16] BAILEY T,UPCROFT B,DURRANT-WHYTE H. Validation gating for non-linear non-gaussian target tracking[C]//International Conference on Information Fusion,Florence,2007:1-4:1-6.