0 引言
尾绳的主要作用是维持提升机的运行平衡,在矿井提升系统中占有非常重要的地位[1]。受提升机设备结构特点的影响,在装卸煤过程中,势必会造成一定的洒煤现象,若洒煤得不到及时处理,将逐渐堆积形成堆煤,且井上操作人员受井筒和井底尾绳分绳架横梁的影响,无法及时发现井底堆煤情况,当堆煤达到一定程度时会托起尾绳,造成尾绳磨损或扭结,从而发生尾绳断股事故[2-3]。因此,需采取相应措施防止堆煤磨损尾绳。
传统防堆煤磨损尾绳保护装置一般分为机械推移式[4]和电极式[5]2种形式。这2种保护装置的工作原理大体相同,都是利用堆煤煤位的变化来间接改变传感器输出电平,通过分析电平的变化量,上位机控制提升系统做出相应的动作。但受矿井井底环境及设备结构特点等影响,传统防堆煤磨损尾绳保护装置存在很大的局限性,主要体现在以下方面:保护装置只能对局部堆煤煤位进行检测,在较大井底空间内无法准确检测出堆煤煤位;保护装置安装位置不易设置,在尾绳附近容易被落煤砸坏,远离尾绳又起不到检测作用;容易误动作、误报警[6]。鉴此,本文设计了一种基于二维激光雷达扫描技术和主动红外对射传感器技术的矿井防堆煤磨损尾绳保护系统,该系统能及时、可靠地检测井底堆煤情况。
1 系统原理
为确保井底堆煤达到一定程度时,能够及时报警或停止提升机运行,矿井防堆煤磨损尾绳保护系统布置了2层保护系统——二维激光雷达扫描系统和主动红外对射传感器系统,如图1所示。该保护系统中各部分与尾绳底部之间的距离可根据矿井实际情况设定。
矿井防堆煤磨损尾绳保护系统工作原理如图2所示。系统开始工作时,二维激光雷达扫描系统开启,主动红外对射传感器系统休眠。二维激光雷达扫描系统中激光测距装置发射激光束,并通过由传动系统转动的光学反光镜形成激光扫描平面,主控电路板控制传动系统转动,当堆煤触及激光扫描平面时,二维激光雷达扫描系统的测距信息发生变化并通过通信端口传递至上位机,上位机开启报警装置,且主动红外对射传感器系统由休眠状态变为开启状态。堆煤若得不到及时处理将继续增高,当堆煤触及主动红外对射传感器系统的光线检测平面时,主动红外对射传感器系统输出的电平信号发生变化并通过通信端口传递至上位机,上位机控制提升机电控系统做出反应,提升机停止工作,防止尾绳磨损、扭结。
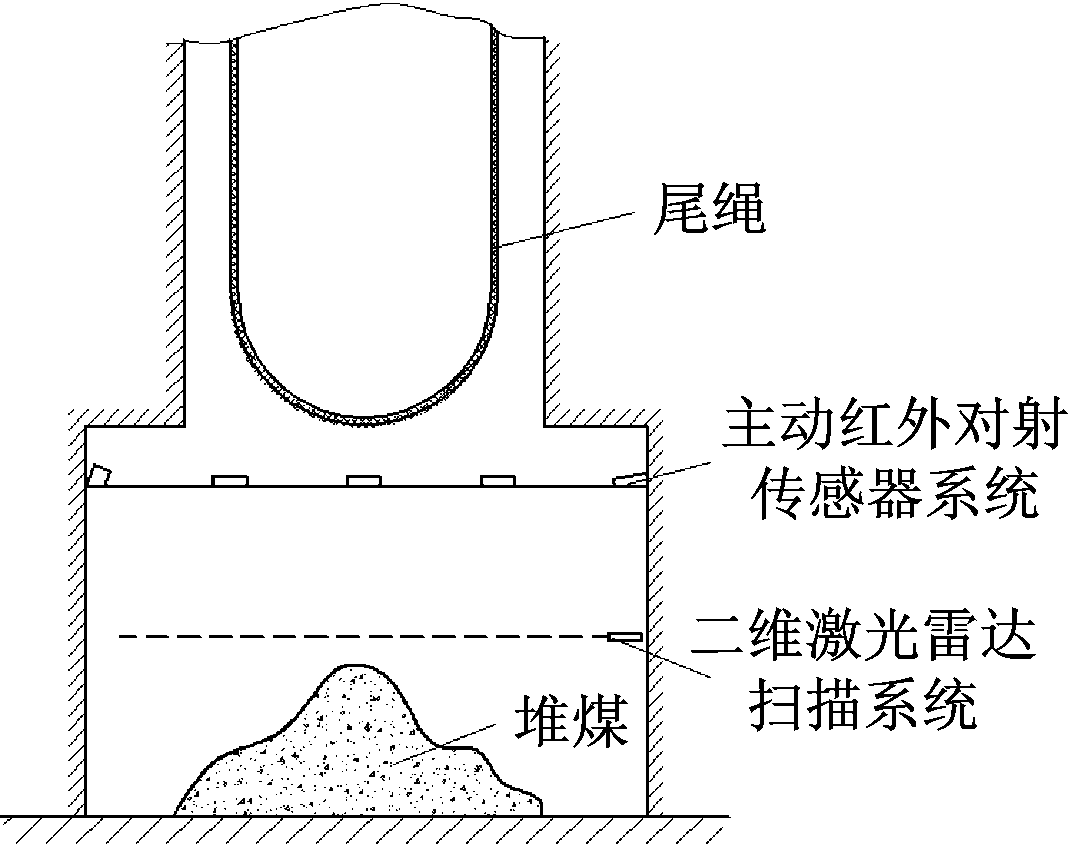
图1 矿井防堆煤磨损尾绳保护系统布置
Fig.1 Layout of protection system for prevention of coal piling wearing tail rope in mine
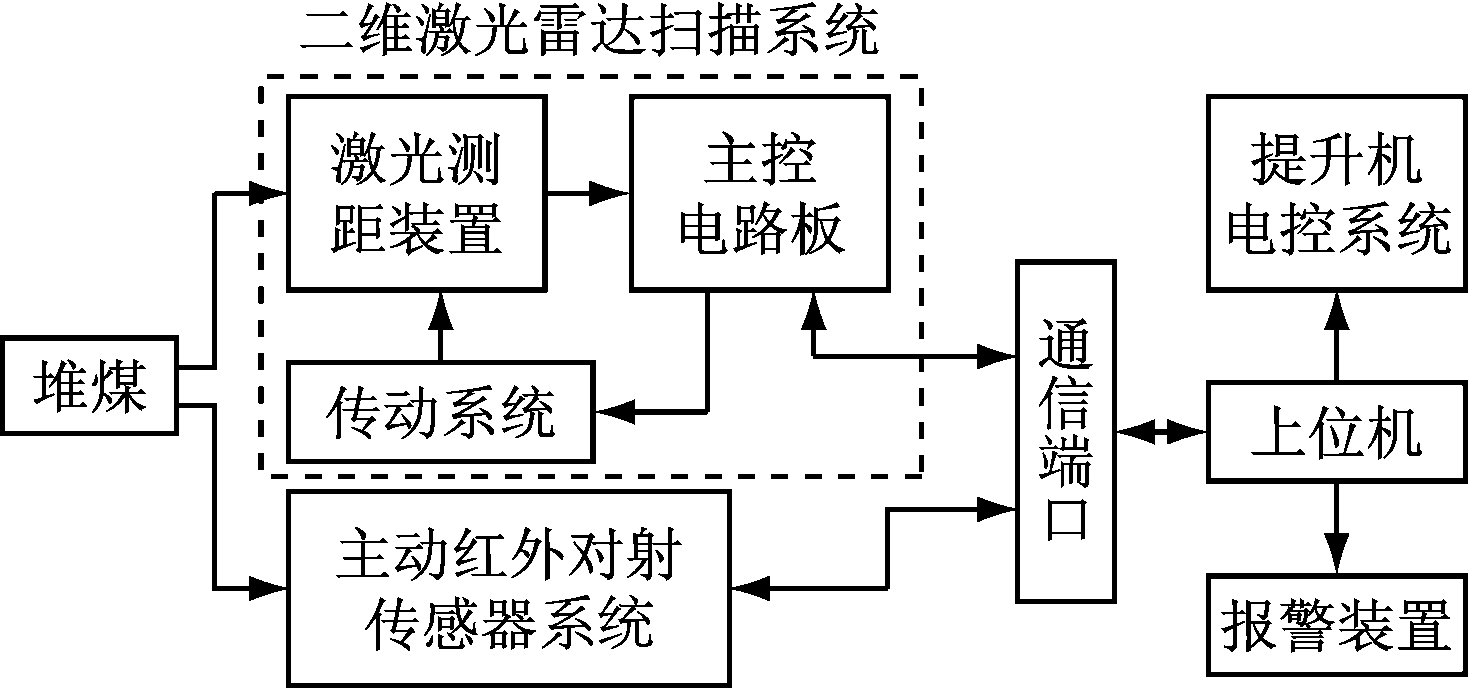
图2 矿井防堆煤磨损尾绳保护系统工作原理
Fig.2 Working principle of protection system for prevention of coal piling wearing tail rope in mine
2 系统关键技术
2.1 二维激光雷达扫描系统
二维激光雷达扫描系统主要利用激光技术的测距原理,通过分析对比发射探测激光束与反射回的探测激光束,得出检测目标的距离[7-9]。针对井底堆煤情况的检测,主要通过判断二维激光雷达扫描系统的测距信息是否发生变化,来判断堆煤煤位是否超限。
二维激光雷达扫描系统主要由激光测距装置、传动系统、主控电路板和光学反光镜等组成,如图3所示。激光测距装置中包含激光发射模块、激光接收模块及激光处理模块等。激光发射模块主要由短脉冲产生电路、发光驱动电路和半导体激光二极管组成[10]。短脉冲产生电路产生脉冲宽度为10~20 ns的触发脉冲;发光驱动电路驱动半导体激光二极管发光,产生单脉冲功率高及脉冲宽度较窄的测量激光束[11]。激光接收模块采用雪崩光电二极管接收反射的光信号[12],采用跨阻放大器放大后进行二级放大,形成结束计时的触发信号。激光处理模块作为计时装置,接收计时起始信号和结束信号[13],完成时差测量,并将时差信息上传至主控电路板。传动系统包含电动机及减速器,并受主控电路板控制,传动系统带动光学反光镜180°来回旋转,形成激光扫描平面。二维激光雷达扫描系统开始工作时测量的距离为初始数据,将初始数据传递至上位机进行储存,当井底堆煤触及激光扫描平面时,系统测量的距离发生变化并上传至上位机,上位机对初始数据和变化数据进行比较,判断井底堆煤煤位是否过高,若是则启动主动红外对射传感器系统及报警装置。
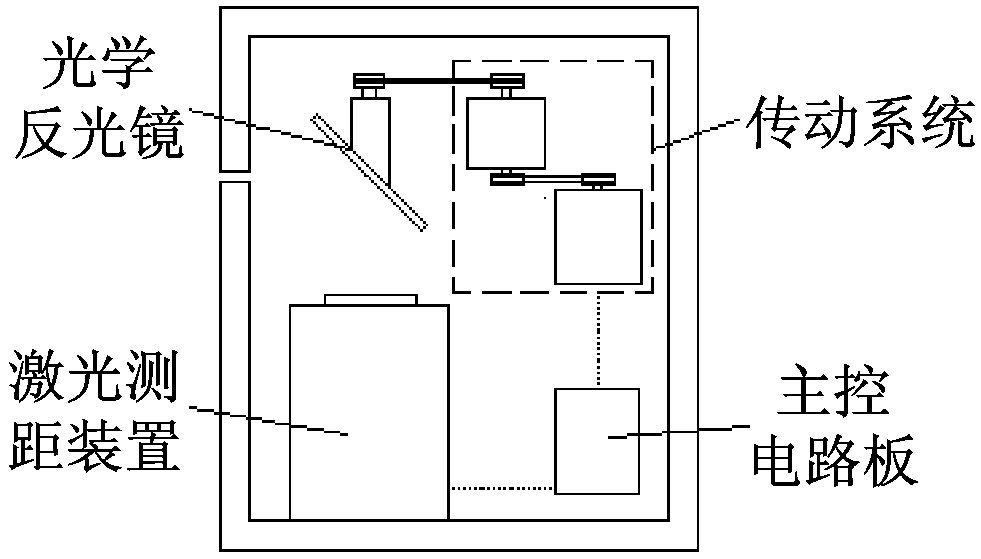
图3 二维激光雷达扫描系统组成
Fig.3 Composition of two-dimensional laser radar scanning system
2.2 主动红外对射传感器系统
主动红外对射传感器系统主要由1组红外发射器、红外接收器及若干光学反光镜组成[14],如图4所示。通过调整光学反光镜的角度,使红外发射器发出的光线经过若干光学反光镜反射后被红外接收器接收,形成网状结构的光线检测平面,该光线检测平面能够提高系统对堆煤煤位的检测范围。红外发射器和红外接收器采用GUG8F矿用本安型红外传感器发射器和接收器,供电直流电压为12.5 V,电流分别为30,10 mA。当堆煤未触及主动红外对射传感器系统的光线检测平面时,主动红外对射传感器系统输出低电平(≤0.5 V);当堆煤触及主动红外对射传感器系统的光线检测平面时,主动红外对射传感器系统输出由低电平变为高电平(≥10 V)并上传至上位机。上位机控制提升机电控系统使提升机停止工作,防止堆煤煤位过高引起尾绳磨损。
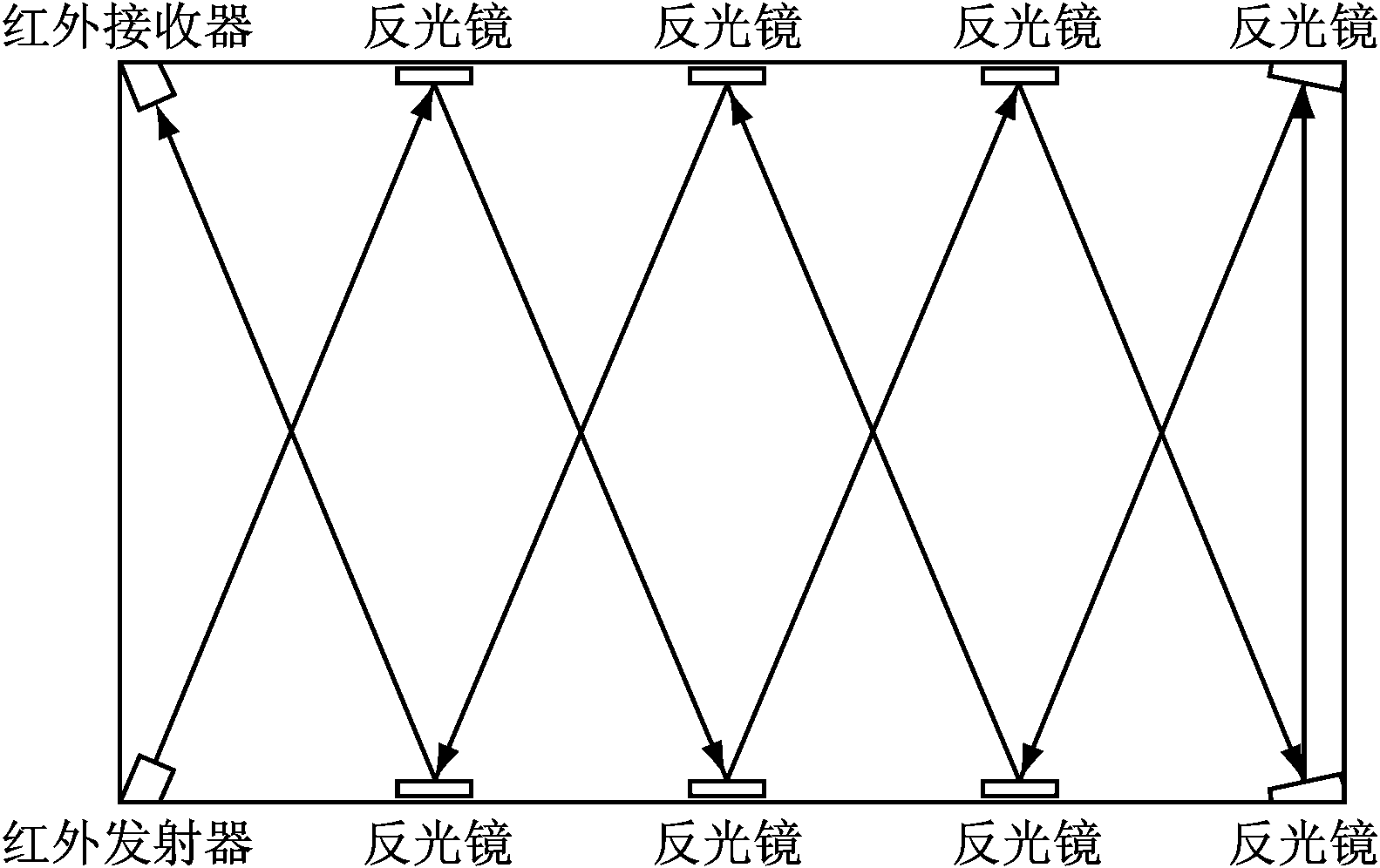
图4 主动红外对射传感器系统组成
Fig.4 Composition of active infrared radiation sensor system
3 系统测试
为验证矿井防堆煤磨损尾绳保护系统的可靠性及实用性,在石拉乌素煤矿对该系统进行测试。首先安装二维激光雷达扫描系统,确保激光扫描平面位于尾绳底部下方100 cm处;然后在距尾绳底部向下40 cm处安装主动红外对射传感器系统;最后将2层保护系统分别通过PLC、Profibus-DP总线与上位机、提升机电控系统连接。
堆煤均未触及2层保护系统时,系统界面如图5(a)所示;当堆煤煤位升高,触及二维激光雷达扫描系统的激光扫描平面时,系统界面如图5(b)所示,测距信息发生变化且开始危险报警;当堆煤得不到及时处理并继续升高,触及主动红外对射传感器系统的光线检测平面时,系统界面如图5(c)所示,光线遮断报警,同时系统控制提升机电控系统使提升机停止运行。测试结果表明,随着堆煤煤位不断增高,系统运行正常、稳定,没有出现误报警、不动作等情况。
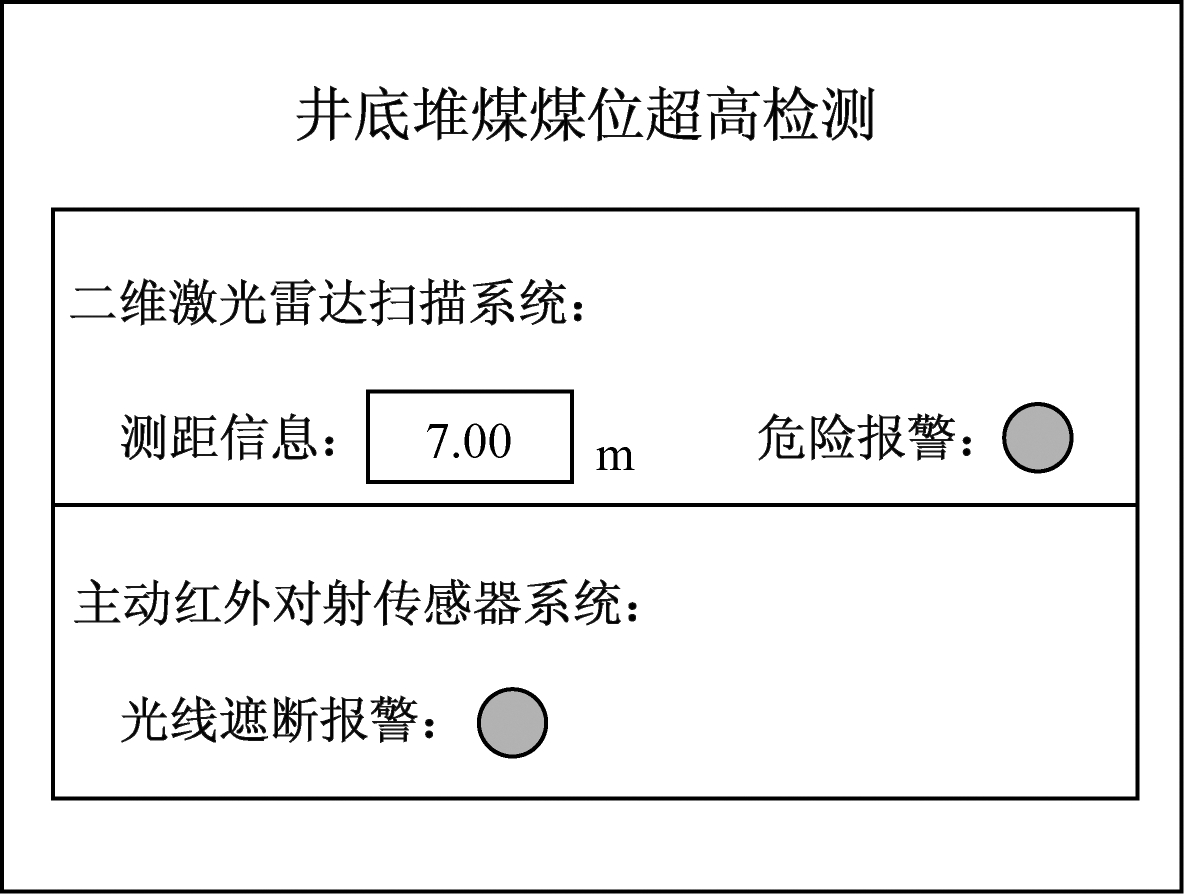
(a) 正常状态界面
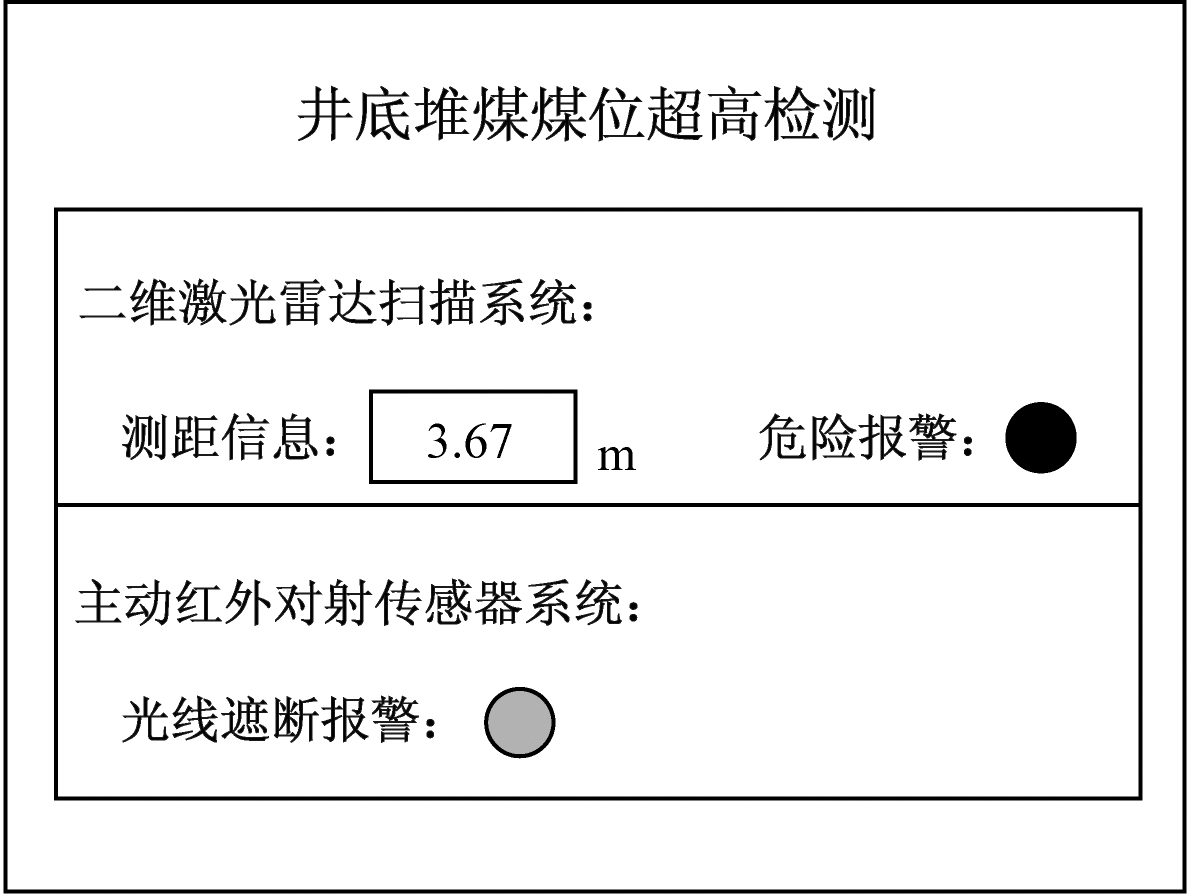
(b) 二维激光雷达扫描系统
报警界面
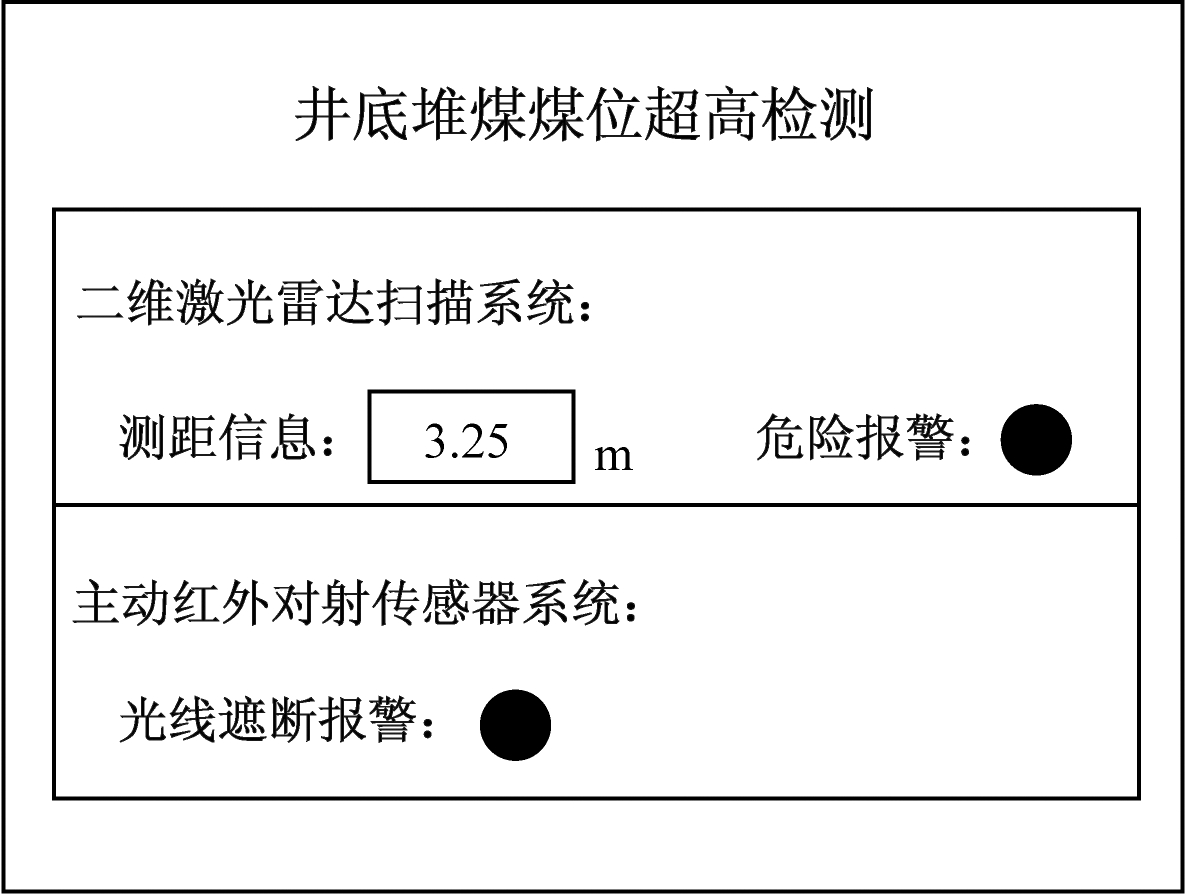
(c) 二维激光雷达扫描系统和主动红外
对射传感器系统报警界面
图5 矿井防堆煤磨损尾绳保护系统测试界面
Fig.5 Test interface of protection system for prevention of coal piling wearing tail rope in mine
4 结语
矿井防堆煤磨损尾绳保护系统由二维激光雷达扫描系统和主动红外对射传感器系统组成。随着矿井井底堆煤煤位的增高,堆煤首先触及二维激光雷达扫描系统,测距信息发生变化并上传至上位机,上位机控制报警装置报警,同时启动主动红外对射传感器系统;若堆煤得不到及时处理将继续增高,堆煤触及主动红外对射传感器系统,电平信号发生变化并上传至上位机,上位机控制提升机电控系统使提升机停止运行,实现对尾绳的防磨损保护。
参考文献(References):
[1] 姜文河,董庆波.摩擦式提升机圆尾绳故障分析[J].矿山机械,2008,36(14):80-81.
JIANG Wenhe,DONG Qingbo.Fault analysis of round tail rope of friction riser[J].Mining & Processing Equipment,2008,36(14):80-81.
[2] 周明弘.主提升系统托尾绳保护装置设计与应用的探讨[J].电子世界,2013(18):73-74.
ZHOU Minghong.Discussion on design and application of tail-rope protection device for main hoisting system[J].Electronics World,2013(18):73-74.
[3] 尹岳.摩擦式提升机尾绳监视系统的应用[J].科技与企业,2015(10):88.
YIN Yue.Application of monitoring system for tail rope of friction lifter[J].Technology & Business,2015(10):88.
[4] 于军.综采工作面端头支架推移装置技术改造[J].河北煤炭,2007(3):58-59.
YU Jun.The technique transformation of the elapse equipment of the end support in the fully mechanized caving mining face[J].Hebei Coal,2007(3):58-59.
[5] 赵松,陈东轩,陶瑞生.煤矿带式输送机综合保护装置的应用探讨[J].煤矿安全,2005,36(2):41-43.
ZHAO Song,CHEN Dongxuan,TAO Ruisheng.Probing into the comprehensive protecting devices of belt conveyor for coal mines[J].Safety in Coal Mines,2005,36(2):41-43.
[6] 李东辰,耿继成,刘顺强,等.煤矿主井撒煤硐室防堆煤磨损尾绳保护系统的设计与应用[J].煤矿机械,2015,36(7):58-60.
LI Dongchen,GENG Jicheng,LIU Shunqiang,et al.Design and application of protection system in case of coal piling milling tail rope in main shaft coal heading[J].Coal Mine Machinery,2015,36(7):58-60.
[7] 李永强,黄存友.激光技术的应用研究进展[J].装备制造技术,2013(1):87-88.
LI Yongqiang,HUANG Cunyou.Application and development of laser technology[J].Equipment Manufacturing Technology,2013(1):87-88.
[8] 张杰.激光雷达原理系统软件设计[D].西安:西安电子科技大学,2010.
[9] 华昊.线性调频连续波激光测距测速的研究[D].长春:长春理工大学,2011.
[10] 张玮玮,何小刚,牛昱光.一种红外发光二极管的驱动电源设计[J].科技情报开发与经济,2007,17(8):241-242.
ZHANG Weiwei,HE Xiaogang,NIU Yuguang.The design of the power supply for infrared emitting diode[J].Sci-tech Information Development & Economy,2007,17(8):241-242.
[11] 张红旗,罗尚文.激光引信脉冲测距精度浅析[J].航空兵器,2004(6):42-44.
ZHANG Hongqi,LUO Shangwen.Accuracy analysis of laser fuze pulse distance measurement[J].Aero Weaponry,2004(6):42-44.
[12] 李天浩,包维.微弱光信号探测APD处理电路设计[J].光电技术应用,2014,29(1):55-60.
LI Tianhao,BAO Wei.Research on avalanche photodiode processing circuit design for weak light signal detection[J].Electro-optic Technology Application,2014,29(1):55-60.
[13] 陈丽诗,冯桂兰,田维坚,等.基于TDC-GP2的脉冲激光测速系统设计[J].工业控制计算机,2009,22(10):84-85.
CHEN Lishi,FENG Guilan,TIAN Weijian,et al.Pulsed laser velocimeter system based on TDC-GP2[J].Industrial Control Computer,2009,22(10):84-85.
[14] 韩东升,陆绮荣,王永辉,等.基于红外传感器的气体检测系统的设计[J].自动化技术与应用,2010,29(5):87-89.
HAN Dongsheng,LU Qirong,WANG Yonghui,et al.Design of the gas detection system based on infrared transducer[J].Techniques of Automation & Applications,2010,29(5):87-89.