0 引言
蓄电池电机车普遍用于中国高瓦斯煤矿作辅助运输设备,目前主要采用直流电动机作为牵引电动机[1],但在使用过程中需要经常对直流电动机进行检查、维修,大大提高了矿用电机车使用成本。内置式永磁同步电动机(Interior Permanent Magnet Synchronous Motor,IPMSM)具有体积小、能耗低、效率高、调速范围广、机械特性硬等特点[2-3],可作为新一代矿用电机车的牵引电动机[4-5]。在煤矿生产环境中,要求电机车在中高速和低速时都能稳定运行,而采用无位置传感器控制获取转子位置信息对于电机车的中高速运行能保证控制精度[6-7],但在低速区间时,由于IPMSM的反电势估算信号的信噪比下降较严重,不能有效提取转子位置及转速信号,导致电机车在低速时不能平稳启动、运行或间歇式停车,引起不必要的机械和电气冲击,缩短蓄电池的续航能力。
在IPMSM无位置传感器低速控制中,高频信号注入法[8-11]应用较广泛,该方法利用IPMSM转子d,q轴磁路不对称形成的凸极效应,能很好地估算IPMSM低速段的转子位置。文献[12-13]提出了基于旋转高频电压注入法的IPMSM无传感器低速运行控制,具有容易实现的优点,但动态性能差。文献[14]指出IPMSM采取旋转高频电流注入法时,容易检测转子位置信息,但会增加系统的复杂性。文献[15]指出采用脉振高频电流注入法的表贴式永磁同步电动机(Surface Permanent Magnet Synchronous Motor,SPMSM)低速时的控制效果好,但该方法比较适用于无凸极性的SPMSM。
本文采用改进脉动高频电压注入法获取含有转子位置角估算误差的信号,通过龙伯格观测器对该信号进行处理后可获取估算的转子位置角和转速,准确地估算出转子在低速时的位置,从而控制IPMSM在低速段稳定工作。实验结果验证了该方法的有效性。
1 转子位置信息获取
1.1 电动机模型
IPMSM在同步旋转坐标系下的定子电压方程:
(1)
式中:ud,uq,Ld,Lq,id,iq分别为定子电压、电感、电流在同步旋转坐标系d,q轴的分量;Rs为定子电阻;p为微分算子;ωr为转子角速度;ψf为永磁体磁链。
当使用脉动高频电压注入法时,对式(1)可作以下简化:① 忽略等式右边第2项,因为其不是高频信号;② 在转子高频角速度ωh≫ωr的情况下,IPMSM定子电感产生的阻抗在总阻抗中占较大比例,故可忽略定子电阻和交叉耦合项。则高频电压方程可简化为
(2)
式中udh,uqh,idh,iqh分别为高频电压、电流在同步旋转坐标系d,q轴的分量。
1.2 脉动高频电压注入法
脉动高频电压注入法是在基波激励的基础上将高频正弦电压信号(在静止坐标系中,该信号是一个脉动的高频电压信号)注入到估计的同步旋转坐标系d′轴上,由于IPMSM的凸极效应,可通过检测估计的同步旋转坐标系q′轴高频电流响应,来获取含有转子位置角估算误差的信号。
在电机车实际运行中,IPMSM转子位置角的实际值θ和估算值θ′之间的误差为
Δθ=θ-θ′
(3)
θ,θ′和Δθ的关系如图1所示。其中,dq为同步旋转坐标系,αβ为静止坐标系,d′q′为估计的同步旋转坐标系。
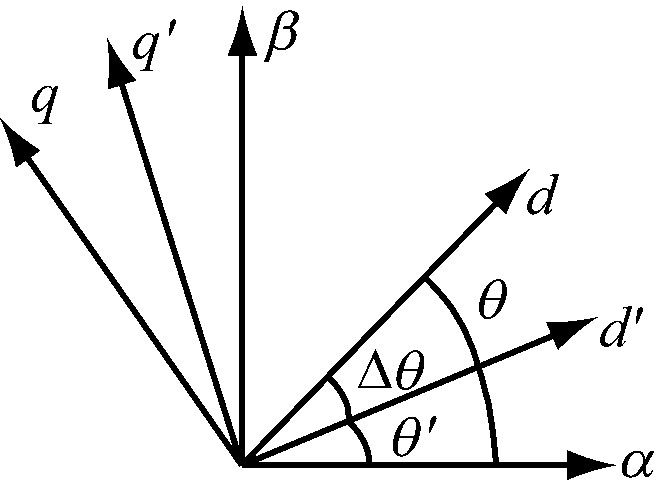
图1 转子位置角坐标关系
Fig.1 Coordinate relation of rotor position angle
同步旋转坐标系和估计的同步旋转坐标系中各变量之间的关系满足:
(4)
(5)
式中![]() ,
,![]() ,
,![]() ,
,![]() 分别为高频电压、电流在估计的同步旋转坐标系d′,q′轴的分量。
分别为高频电压、电流在估计的同步旋转坐标系d′,q′轴的分量。
将式(2)、式(4)代入式(5),得
(6)
式中:![]()
![]()
由于只在估计的同步旋转坐标系d′轴上注入脉动高频电压信号,只会产生相应的电流![]() ,不会引起q′轴转矩脉动,则有
,不会引起q′轴转矩脉动,则有
(7)
式中Uinj为脉动高频电压信号幅值。
联立式(6)和式(7)得
(8)
在Δθ很小的情况下,式(8)可简化为
(9)
注入脉动高频电压信号后,电动机定子三相电流中含有高频率的电流成分。将检测到的三相电流变换到估计的同步旋转坐标系中,q′轴电流![]() 主要包括基波电流
主要包括基波电流![]() ,
,![]() 和高频谐波电流
和高频谐波电流![]() 将这3种电流经过一定的处理可得关于Δθ的函数ε(Δθ)。
将这3种电流经过一定的处理可得关于Δθ的函数ε(Δθ)。
1.3 改进脉动高频电压注入法
常规的脉动高频电压注入法通过图2(a)所示的滤波环节来获取ε(Δθ),但多个滤波器滞后效应的叠加会增加系统时间常数,降低系统动态性能。
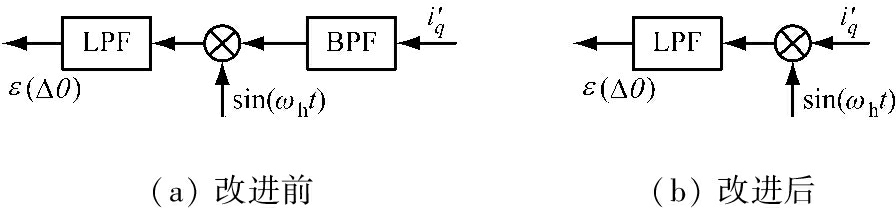
图2 脉动高频电压注入法滤波环节
Fig.2 Filter link of pulsating high-frequency voltage injection method
估计的同步旋转坐标系中![]() ,
,![]() 和i
和i![]() 分别为
分别为
(10)
式中:![]() ,
,![]() ,I
,I![]() 分别为
分别为![]() ,
,![]() ,i
,i![]() 的幅值;ωH为转子高频谐波角速度,ωH≫ωh。
的幅值;ωH为转子高频谐波角速度,ωH≫ωh。
将![]() ,
,![]() 和i
和i![]() 分别乘以sin(ωht)后再经低通滤波器(Low Pass Filter,LPF)处理,可得
分别乘以sin(ωht)后再经低通滤波器(Low Pass Filter,LPF)处理,可得
LPF(![]() sin(ωht))=0
sin(ωht))=0
(11)
LPF(![]() sin(ωht))=
sin(ωht))=![]()
(12)
LPF(i![]() sin(ωht))=0
sin(ωht))=0
(13)
由式(11)—式(13)可知,直接将![]() 与sin(ωht)相乘再经LPF处理,即使省去带通滤波器(Band Pass Filter,BPF)环节,仍可滤去无关电流,并可获得ε(Δθ)。改进后脉动高频电压注入法的滤波环节如图2(b)所示。
与sin(ωht)相乘再经LPF处理,即使省去带通滤波器(Band Pass Filter,BPF)环节,仍可滤去无关电流,并可获得ε(Δθ)。改进后脉动高频电压注入法的滤波环节如图2(b)所示。
由以上分析可得:① 改进脉动高频电压注入法降低了系统复杂性,避免了多个滤波器导致的系统时间常数增加,能提高系统低速段的动态性能。②ε(Δθ)的幅值与转子位置信息估算误差不相关,且稳态跟踪效果和电动机参数无关。③ 估算的转子位置信息和电动机转速无关,IPMSM能在低速段稳定工作。④ 由于ωh是给定量,信号处理过程具有准确性。
1.4 龙伯格观测器
将ε(Δθ)作为误差矫正项输入龙伯格观测器中便可获取估算的转子位置角和转速,具体处理过程如图3所示,其中e为误差信号,k1,k2,k3为控制系数,J′和![]() 分别为估算的转动惯量和电磁转矩,
分别为估算的转动惯量和电磁转矩,![]() 为估算的转子角速度。
为估算的转子角速度。
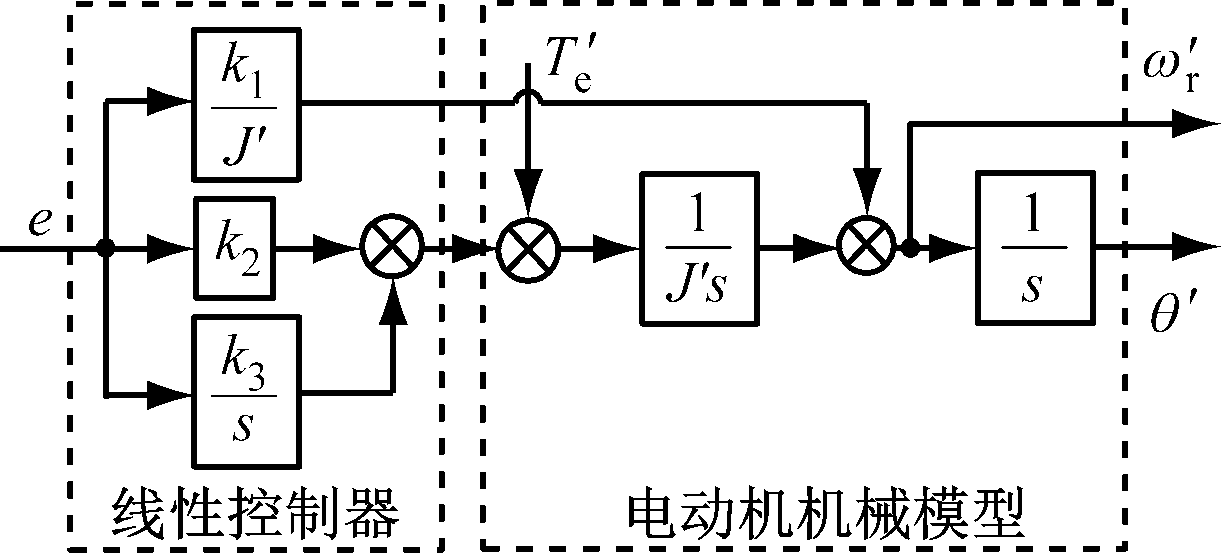
图3 龙伯格观测器
Fig.3 Luenberger observer
该观测器特点:① 当ε(Δθ)趋于零时,估算的转子位置角趋于θ。② 估算的电磁转矩充当前馈信号施加到电动机机械模型中,能加快观测器的响应速度,从而提高观测器的动态性能。
2 仿真和实验
2.1 仿真分析
为验证改进脉动高频电压注入法的有效性,在Matlab仿真平台建立如图4所示的IPMSM无位置传感器控制系统模型,其中Udc为直流电压,iα,β为静止坐标系下的电流,ia,b,c为三相坐标系下的电流,![]() 为期望的定子电流在同步旋转坐标系d轴的分量。仿真参数:极对数P=4,定子电阻Rs=0.19 Ω,定子电感在同步旋转坐标系d轴的分量Ld=5.5 mH,定子电感在同步旋转坐标系q轴的分量Lq=8 mH,转动惯量J=0.088 kg·m2,永磁体磁链ψf=0.185 Wb,脉动高频电压信号幅值Uinj=15 V,转子高频角速度ωh=6 280 rad/s。
为期望的定子电流在同步旋转坐标系d轴的分量。仿真参数:极对数P=4,定子电阻Rs=0.19 Ω,定子电感在同步旋转坐标系d轴的分量Ld=5.5 mH,定子电感在同步旋转坐标系q轴的分量Lq=8 mH,转动惯量J=0.088 kg·m2,永磁体磁链ψf=0.185 Wb,脉动高频电压信号幅值Uinj=15 V,转子高频角速度ωh=6 280 rad/s。
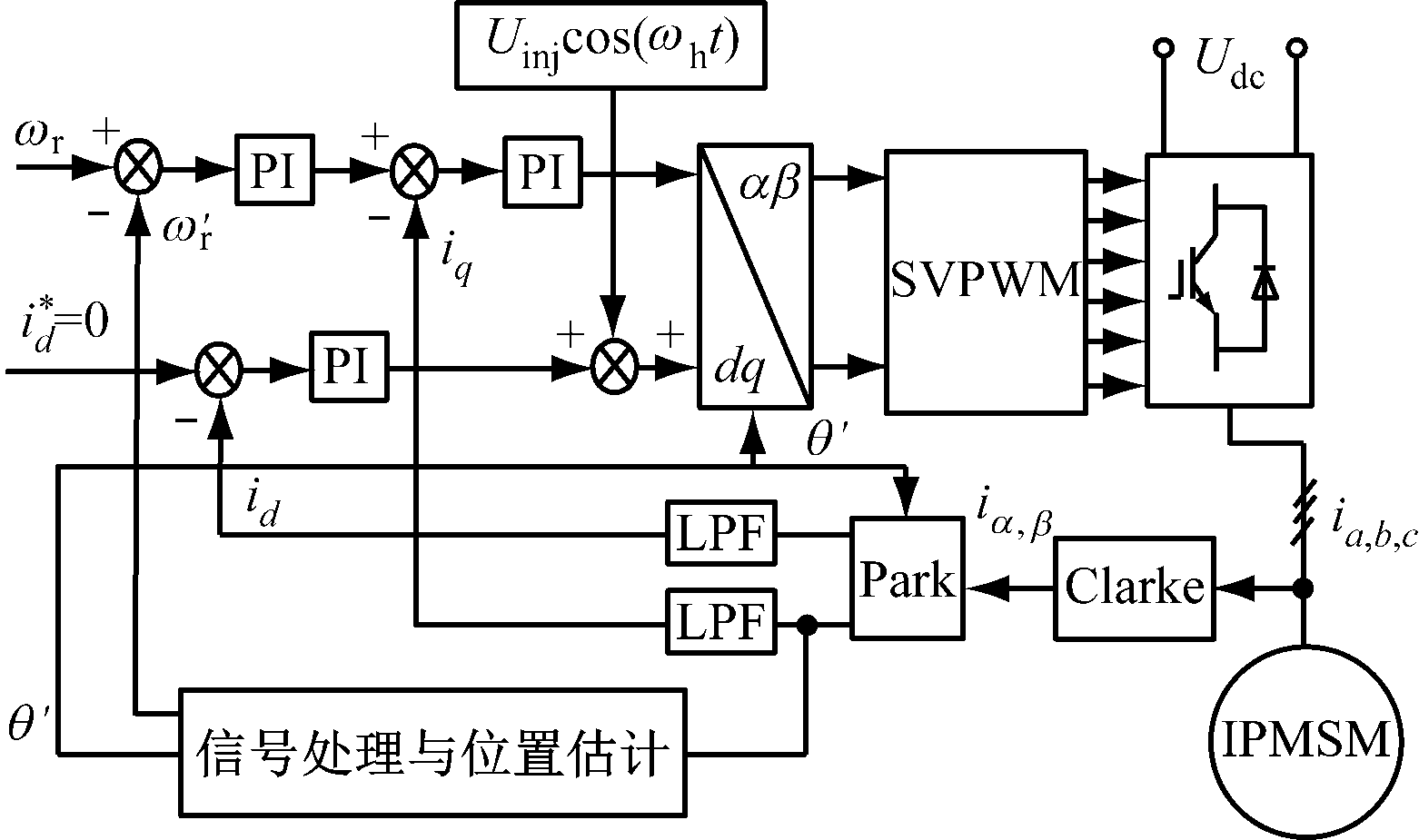
图4 IPMSM无位置传感器控制系统模型
Fig.4 Sensorless control system model of IPMSM
IPMSM以150 r/min转速正常工作的仿真结果如图5所示(n,n′,Te分别为实际转速、估算的转速和电磁转矩),可看出θ和θ′基本一致,误差在2°左右,并能较好地跟踪转速,Te保持稳定。
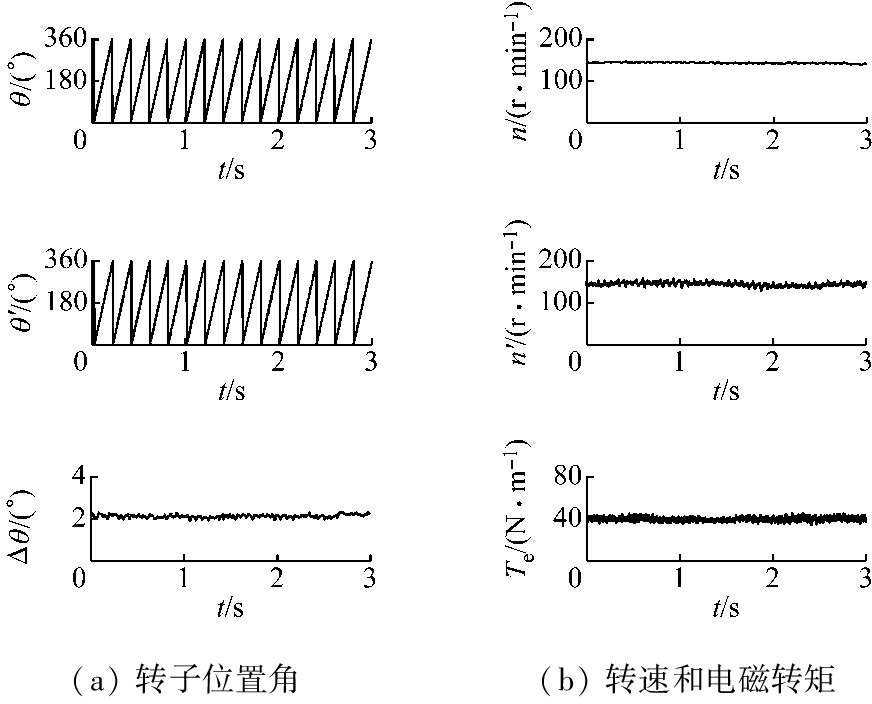
图5 150 r/min时仿真波形
Fig.5 Simulation waveforms at 150 r/min
IPMSM以80 r/min低速运行,在1.5 s时电动机反转的仿真结果如图6所示,可看出在反转时刻Δθ增大,n和n′基本一致,Te减小,在0.3 s后均恢复稳定。
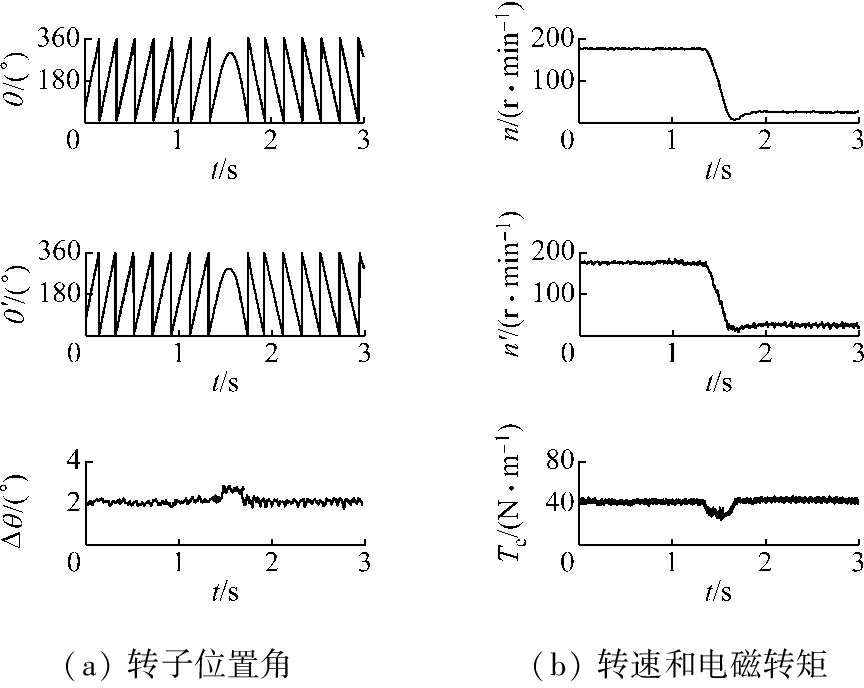
图6 80 r/min时仿真波形
Fig.6 Simulation waveforms at 80 r/min
IPMSM以零速运行,在1 s时带10 N·m电动性负载,2 s时卸去负载,3 s时带10 N·m发电性质负载的仿真结果如图7所示,可看出突加、突卸负载导致Δθ增大,n和n′基本一致,突加负载导致Te增大,突减负载导致Te减小,但约0.3 s后均恢复稳定。
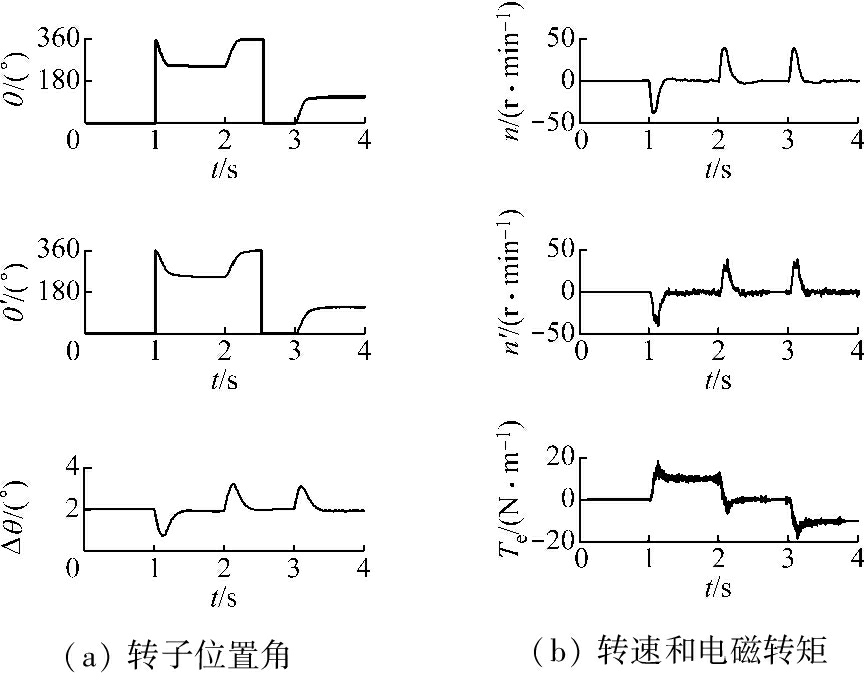
图7 零速时仿真波形
Fig.7 Simulation waveforms at zero speed
由仿真结果可知,IPMSM采用改进脉动高频电压注入法时,电动机在低速段的静态和动态性能良好,能精确估算并跟踪转子位置角和转速。
2.2 实验验证
将改进脉动高频电压注入法应用于实际的矿用电机车IPMSM无位置传感器控制系统中,采用TBQ-22YC型IPMSM作为矿用电机车的牵引电动机,以TMS320LF2812 DSP为控制核心,采用IPM功率模块为逆变电路,通过外加转子编码器实测电动机转速。
IPMSM以90,50 r/min转速运行时的定子两相电流和转子编码器实测输出脉冲信号分别如图8、图9所示。可看出在转速很低的情况下,虽然定子电流中的畸变因子较大(未加滤波),但转子编码器测量的输出脉冲稳定,表明改进脉动高频电压注入法能使IPMSM在低速段稳定工作,且具有良好的动静态性能。

(a) 定子两相电流
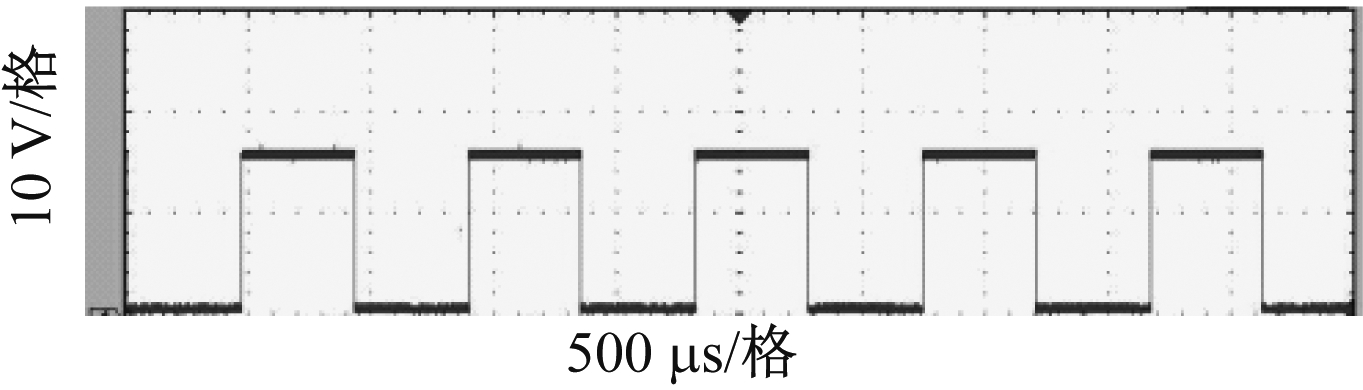
(b) 转子编码器脉冲信号
图8 90 r/min时实测波形
Fig.8 Measured waveforms at 90 r/min
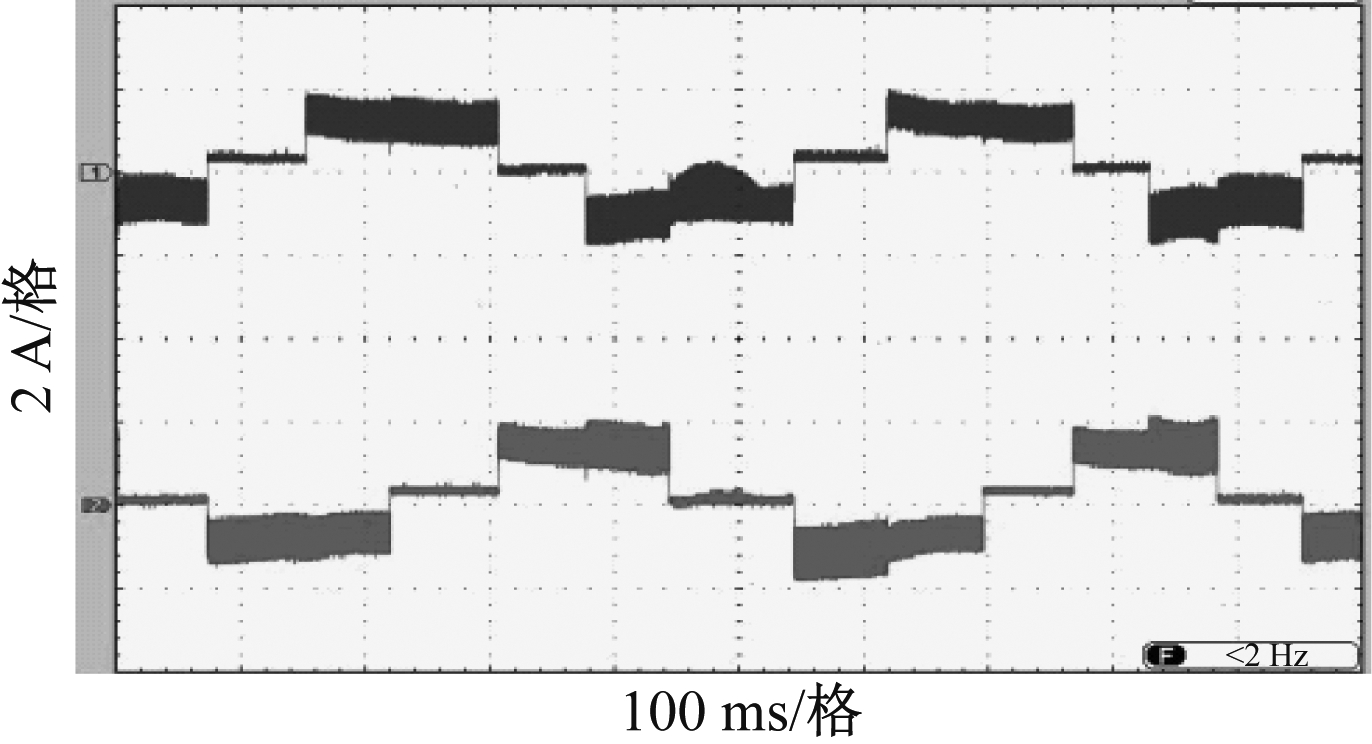
(a) 定子两相电流
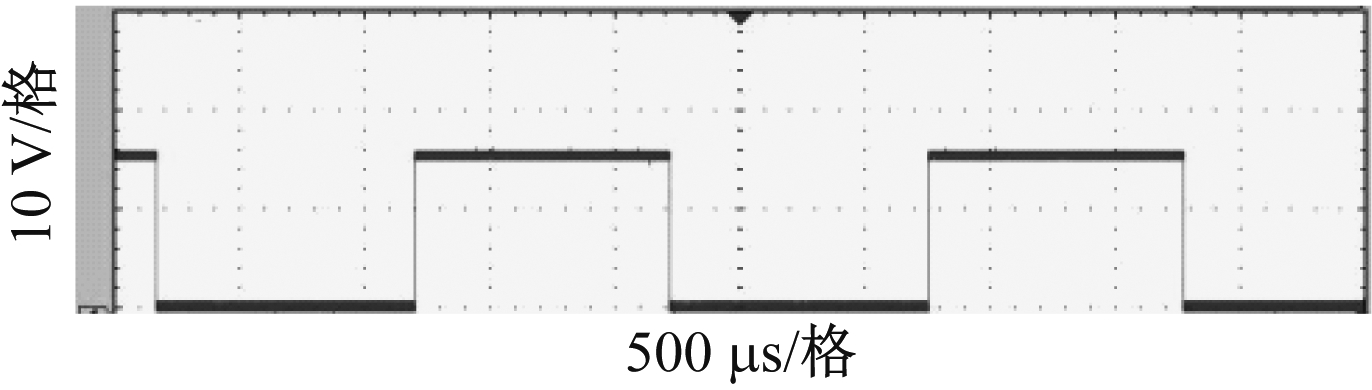
(b) 转子编码器脉冲信号
图9 50 r/min时实测波形
Fig.9 Measured waveforms at 50 r/min
3 结语
针对矿用电机车IPMSM无位置传感器低速控制稳定性问题,对脉动高频电压注入法滤波环节进行改进,仅利用LPF对高频电流进行处理,得到含有转子位置角估算误差的信号,将该信号输入龙伯格观测器获取估算的转子位置角和转速。仿真和实验结果表明,改进脉动高频电压注入法提高了IPMSM低速段的动静态性能,使电机车在低速段能平稳启动、运行和停车。
参考文献(References):
[1] 郭凤仪,史艳影,王建跃,等.矿用电机车直流斩波调速系统的研究与实现[J].测控技术,2011,30(10):40-43.
GUO Fengyi,SHI Yanying,WANG Jianyue,et al.Research and implement of mining electric locomotive DC chopper control system[J].Measurement & Control Technology,2011,30(10):40-43.
[2] 董晨露,陈涛.电机车IPMSM高频脉振电压注入法转子位置检测[J].电机与控制应用,2015,42(8):67-71.
DONG Chenlu,CHEN Tao.Motor vehicle IPMSM rotor position detection based on high frequency pulsating voltage injection[J].Electric Machines & Control Application,2015,42(8):67-71.
[3] 袁庆伟.基于定子磁链控制的IPMSM驱动系统研究[D].杭州:浙江大学,2017.
[4] 张俊卿,梅奕,黄友锐,等.基于永磁同步电动机的矿用电机车调速系统设计[J].工矿自动化,2014,40(2):45-48.
ZHANG Junqing,MEI Yi,HUANG Yourui,et al.Design of speed regulation system of mine-used electric locomotive based on permanent magnet synchronous motor[J].Industry and Mine Automation,2014,40(2):45-48.
[5] 郑昌陆.矿用电机车的永磁同步电机控制关键技术研究[D].上海:上海大学,2013.
[6] 王高林,于泳,李刚,等.无传感器内置式永磁同步电机低速运行转子位置鲁棒观测器[J].中国电机工程学报,2012,32(15):84-90.
WANG Gaolin,YU Yong,LI Gang,et al.Robust rotor position observers of sensorless interior permanent magnet synchronous motor for low-speed operation[J].Proceedings of the CSEE,2012,32(15):84-90.
[7] WIBOWO W K,JEONG S K.Improved estimation of rotor position for sensorless control of a PMSM based on a sliding mode observer[J].Journal of Central South University,2016,23(7):1643-1656.
[8] 廖军.基于高频信号注入的PMSM无速度传感器控制策略研究[D].合肥:合肥工业大学,2010.
[9] 张彦平.基于高频信号注入法的永磁同步电机无位置传感器方法研究[D].西安:西安理工大学,2017.
[10] 廖军,张兴,杨淑英,等.改进高频信号注入法的IPMSM转子位置检测研究[J].合肥工业大学学报(自然科学版),2010,33(8):1161-1165.
LIAO Jun,ZHAGN Xing,YANG Shuying,et al.Research on the IPMSM rotor position estimation based on improved high frequency injection method[J].Journal of Hefei University of Technology(Natural Science),2010,33(8):1161-1165.
[11] 秦峰,贺益康,刘毅,等.两种高频信号注入法的无传感器运行研究[J].中国电机工程学报,2005,25(5):116-121.
QIN Feng,HE Yikang,LIU Yi,et al.Comparative investigation of sensorless control with two high-frequency signal injection schemes[J].Proceedings of the CSEE,2005,25(5):116-121.
[12] FOO G,RAHMAN M F.Sensorless direct torque and flux-controlled IPM synchronous motor drive at very low speed without signal injection[J].IEEE Transactions on Industrial Electronics,2010,57(1):395-403.
[13] 孟淑平,郭宏,徐金全.基于基波电流观测器和旋转高频电压注入法的IPMSM无传感器控制[J].航空学报,2016,37(4):1336-1351.
MENG Shuping,GUO Hong,XU Jinquan.A new sensorless control strategy combining a fundamental current observer with rotating high-frequency voltage injection method for interior permanent magnet synchronous motor[J].Acta Aeronautica et Astronautica Sinica,2016,37(4):1336-1351.
[14] MAKAINO Y, SONG H,DOKI S.A position sensorless control for IPMSM at low speed based on current response at zero voltage vector without any additional signal injection[C]// IEEE Symposium on Sensorless Control for Electrical Drives,Nadi,2016:1-4.
[15] 刘颖,周波,冯瑛,等.基于脉振高频电流注入SPMSM低速无位置传感器控制[J].电工技术学报,2012,27(7):139-145.
LIU Ying,ZHOU Bo,FENG Ying,et al.Sensorless control of SPMSM based on high frequency current signal injection in the direct axis at low and zero speed[J].Transactions of China Electrotechnical Society,2012,27(7):139-145.