0 引言
PDR(Pedestrian Dead Reckoning,行人航迹推算)算法对短距离定位的精度较高,受周围环境影响小,但存在定位误差累计的缺点。文献[4]通过采集加速度计、陀螺仪和磁力计数据,结合粒子滤波解决了传感器漂移误差关键技术问题,实现了井下定位,但并未提及初始定位位置对准问题。
本文充分考虑RSSI指纹定位算法和PDR算法[5]特点,将2种算法进行EKF(Extended Kalman Filter,扩展卡尔曼滤波)融合,设计了一种兼顾定位精度和系统成本的矿井人员融合定位系统。该系统通过智能终端采集惯性传感器、RSSI和时间戳数据,将数据通过井下WiFi网络和工业以太环网上传至地面监控中心定位服务器;定位服务器对RSSI指纹定位算法和PDR算法的定位数据进行EKF融合,实现井下人员定位。该系统减小了指纹离线采样阶段指纹数据库采集难度,解决了定位累计误差大的问题,提高了井下定位精度。
1 系统组成
矿井人员融合定位系统主要由地面监控中心、井下工业以太环网、本质安全型AP(Access Point,接入点)和智能终端组成,如图1所示。本质安全型AP构成无线WiFi网络,实现井下无线网络覆盖;地面监控中心通过千兆工业以太环网和无线WiFi网络实现对智能终端的监测[6-7]。
智能终端集环境采集、人员定位、信息交互等功能于一体,由矿工随身携带。矿工通过智能终端实时获取井下温度、瓦斯浓度、当前时间等信息,查看调度、救援信息[6]。智能终端组成如图2所示。惯性传感器采用MPU9150。控制器采用GS1011,其内部集成无线WiFi模块,将MPU9150采集的加速度、角速度、磁场方向,以及智能终端接收的RSSI数据上传至地面监控中心定位服务器,利用RSSI指纹库和PDR算法进行EKF融合定位。
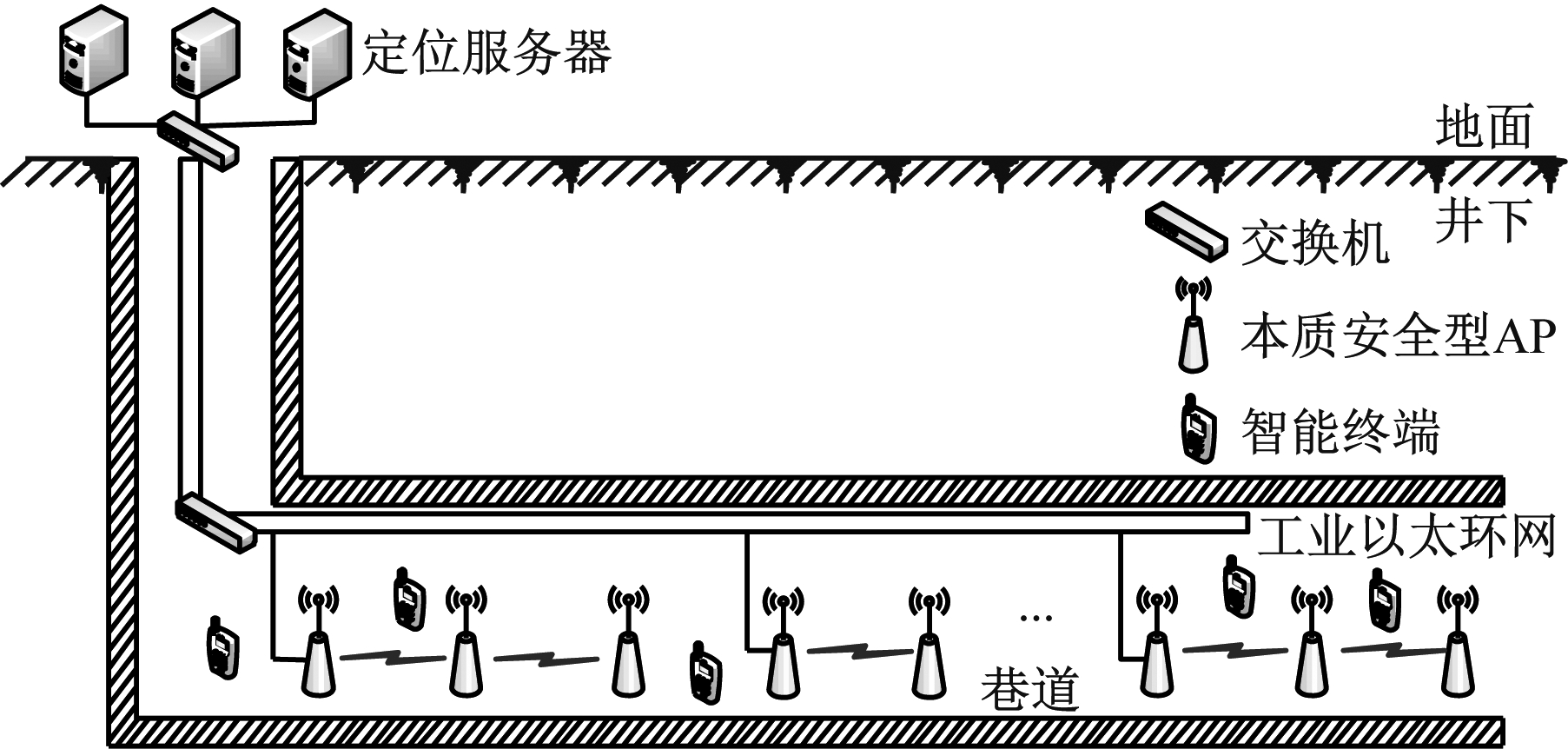
图1 矿井人员融合定位系统组成
Fig.1 Composition of mine personnel fusion location system
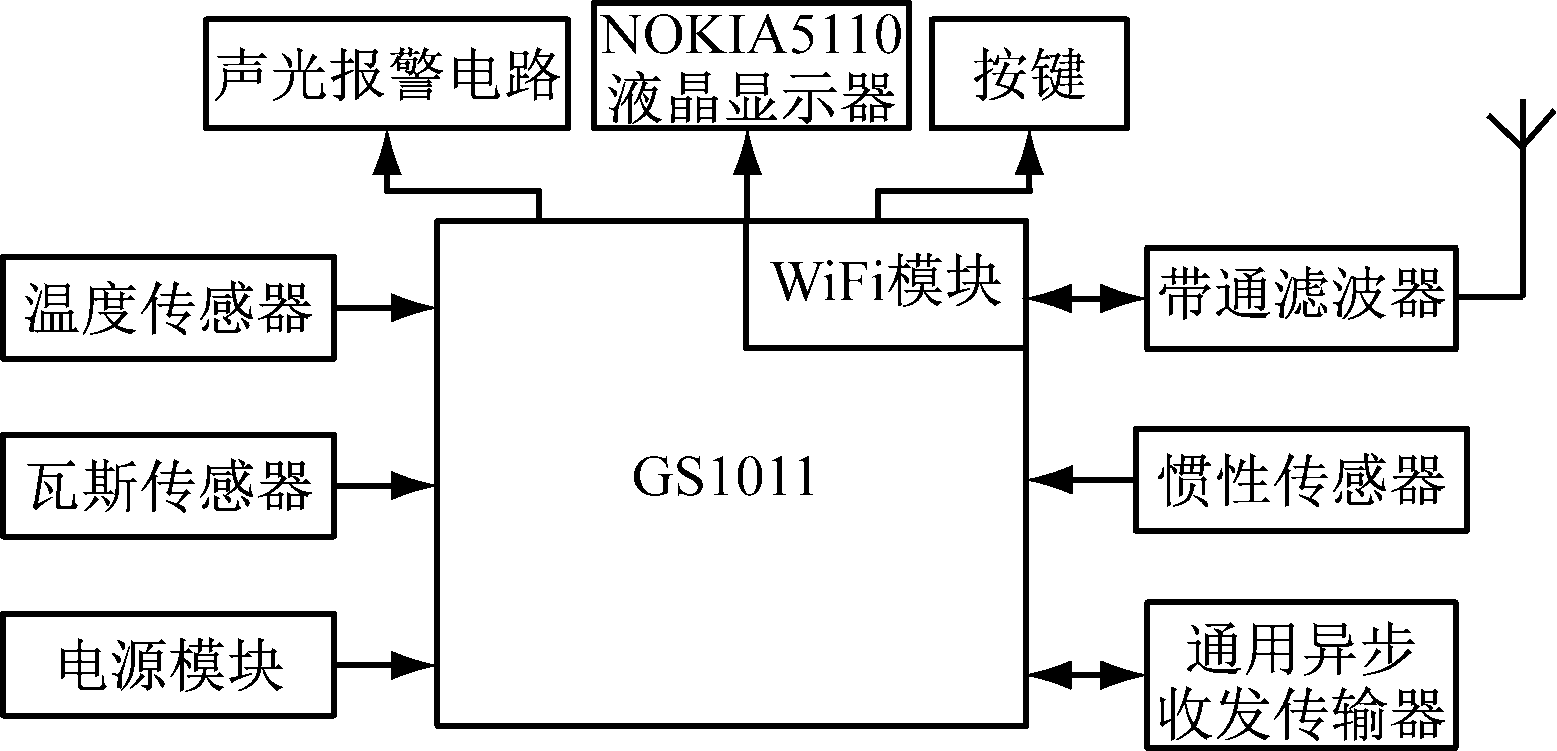
图2 智能终端组成
Fig.2 Composition of intelligent terminal
2 系统关键技术
2.1 系统AP布置方式
煤矿井下为受限空间,巷道呈长链状,实际宽度为3~4 m,长度达几十千米。井下巷道近似线型的分布方式降低了AP间的相互影响,可看成一维定位环境,只考虑巷道长度方向。结合巷道电缆和通风设备安装规范,在主巷道或永久性巷道内沿巷道壁一侧布置AP,如图3所示。采用Aero Scout Analysis无线信号分析软件测试后发现,普通巷道内AP的覆盖范围为180~200 m。为保证井下WiFi网络全覆盖,设定AP间距为90 m。
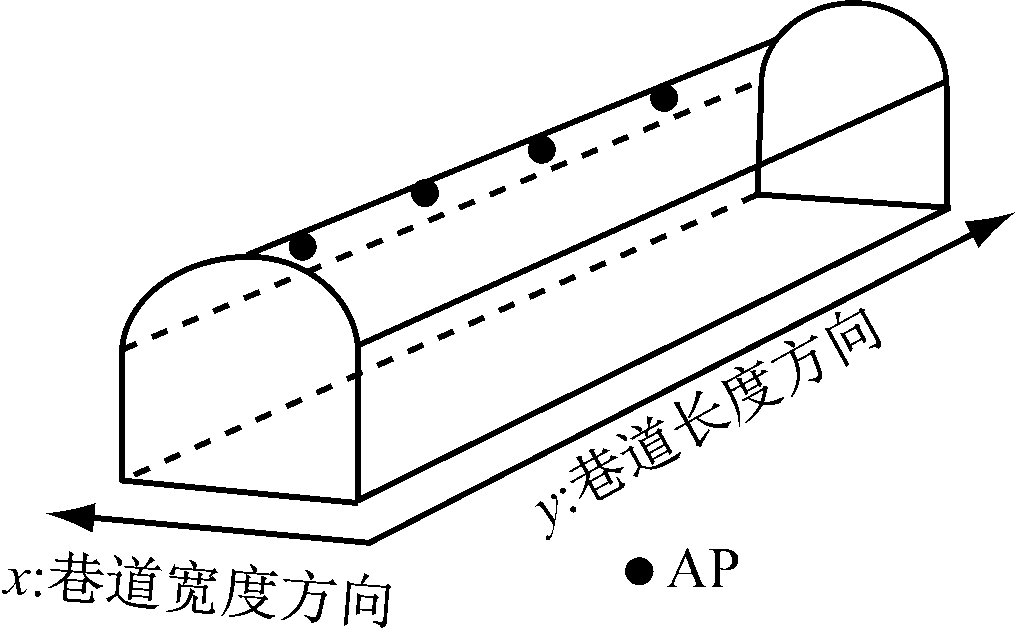
图3 矿井人员融合定位系统AP布置
Fig.3 AP distribution of mine personnel fusion location system
2.2 PDR算法
PDR算法利用惯性传感器提供的数据,结合初始位置,估计出运动步频、步长和方向角,利用式(1)估计下一时刻的定位位置。
(1)
式中:(xp,yp)为人员第p步所在位置的坐标;lp+1为第p+1步的步长;φp+1为第p+1步的方向角。
PDR算法的关键在于估计运动步频、步长和方向角。系统根据加速度传感器x,y,z方向上的分量ax,ay,az,获得原始传感器数据![]() 采用高斯平滑滤波对含有噪声的a进行滤波处理,采用峰值检测法检测运动步频。
采用高斯平滑滤波对含有噪声的a进行滤波处理,采用峰值检测法检测运动步频。
经典步长估计模型有步长和步频线性模型[8]、非线性模型(如Weinberg Approach模型[9])、自适应学习步长模型等。系统采用稳定性和复杂性适中的Weinberg Approach模型进行补偿估计,如式(2)所示。
(2)
式中:l为步长;C为常数,可根据实际步长进行修正;ωmax,ωmin分别为行走中的最大和最小角速度。
系统采用四元数法[7]估计方向角。对惯性导航数据进行滤波、去噪,采用四元数法求解姿态矩阵,计算出智能终端姿态角度,进而得到其运动方向。
2.3 改进RSSI指纹定位算法
RSSI指纹定位算法包括离线采样阶段和定位匹配阶段[10]。离线采样阶段对一些标定位置进行RSSI信息采集,建立样本点指纹数据库。定位匹配阶段对终端获得的信号强度与指纹库中的指纹信息进行匹配,获得终端位置。
现有的井下RSSI指纹定位算法存在的问题:① 离散采样多采用全监督方式[2,5,11],每隔2~3 m进行1次指纹采集,不适用于井下狭长巷道,耗费人力、物力。② 井下环境复杂,RSSI信号易受终端运动方向、使用者身体遮挡等因素的影响,在同一位置、不同运动方向,终端接收到AP的RSSI值可能不同。
考虑到煤矿井下可看成一维环境,在离散采样阶段采用连续采样和线性内插的半监督采样方式[12]建立指纹数据库,以提高定位精度。在指纹数据库中引入终端运动方向信息,通过优化指纹数据库,采用区域定位方式实现井下快速定位。改进的RSSI指纹定位算法原理如图4所示。
(1) 离线采样阶段。人员手持智能终端,沿选定采样路径以1 m/s匀速行进,终端每隔1 s采样1次数据,遍历巷道。已知采样路径起始位置Lstart(xstart,ystart)、结束位置Lend(xend,yend)及每个参考点的采样时间戳T(由智能终端提供),利用线性内插公式(式(3)),计算路径中每个参考点的位置L(x,y)。
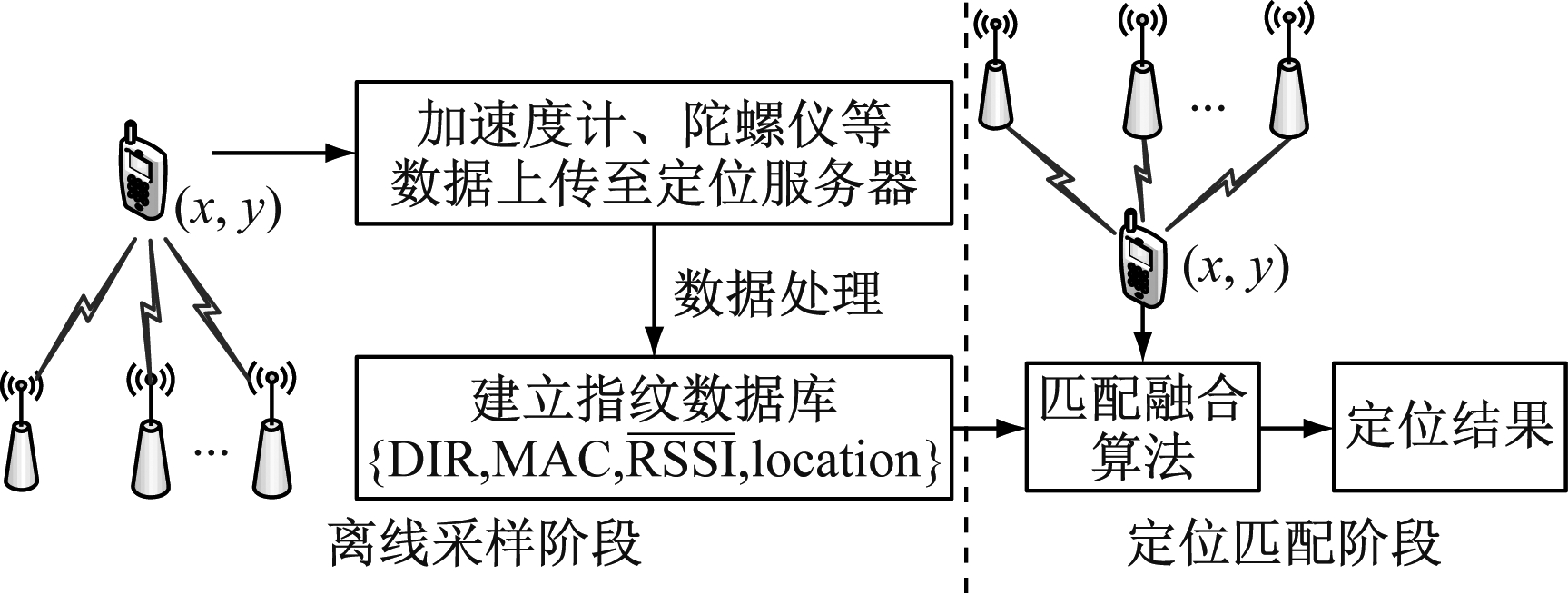
图4 改进的RSSI指纹定位算法原理
Fig.4 Principle of improved RSSI fingerprint location algorithm
L(x,y)=![]()
(Lend(xend,yend)-Lstart(xstart,ystart))
(3)
式中:Ti为采样时间;Tstart为采样开始时间;Tend为采样结束时间。
通过测试发现,当背对AP时,RSSI值达到最低。在离线采样阶段,人员分别沿选定路径匀速往返测量多次,分别将终端运动方向、每个采样点接收到各AP的RSSI值及采样时间戳T上传至定位服务器。
定位服务器接收到数据后,通过数据处理建立指纹数据库![]() 其中DIR为终端运动方向,location为与之对应的当前位置
其中DIR为终端运动方向,location为与之对应的当前位置![]() 分别为终端接收到AP的MAC地址和RSSI平均值。考虑到在同一固定位置、同一运动方向处接收到的来自同一AP的信号服从高斯分布,对同一固定位置、同一运动方向多次测量的RSSI取均值,并将其存入指纹数据库。
分别为终端接收到AP的MAC地址和RSSI平均值。考虑到在同一固定位置、同一运动方向处接收到的来自同一AP的信号服从高斯分布,对同一固定位置、同一运动方向多次测量的RSSI取均值,并将其存入指纹数据库。
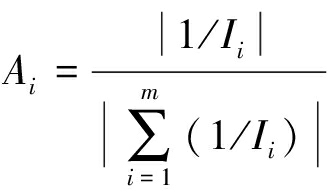
(2) 定位匹配阶段。通过查找终端接收到AP的RSSI最大值及与之对应的MAC地址,锁定终端所在区域。根据方向角确定终端运行方向,利用改进欧式距离公式(式(4))和K近邻算法,找出终端接收AP的RSSI与指纹数据库中包含该MAC地址的RSSI距离最短的K个样本,求其质心作为定位点的估计位置。
(4)
式中:L为终端锁定区域内所有接收到AP的RSSI与对应RSSI平均值的欧氏距离;m为接收到AP的RSSI个数;Ai为第i个AP所占的权重![]() 分别为接收到第i个AP的RSSI和RSSI平均值。
分别为接收到第i个AP的RSSI和RSSI平均值。
(5)
定位匹配流程如图5所示。
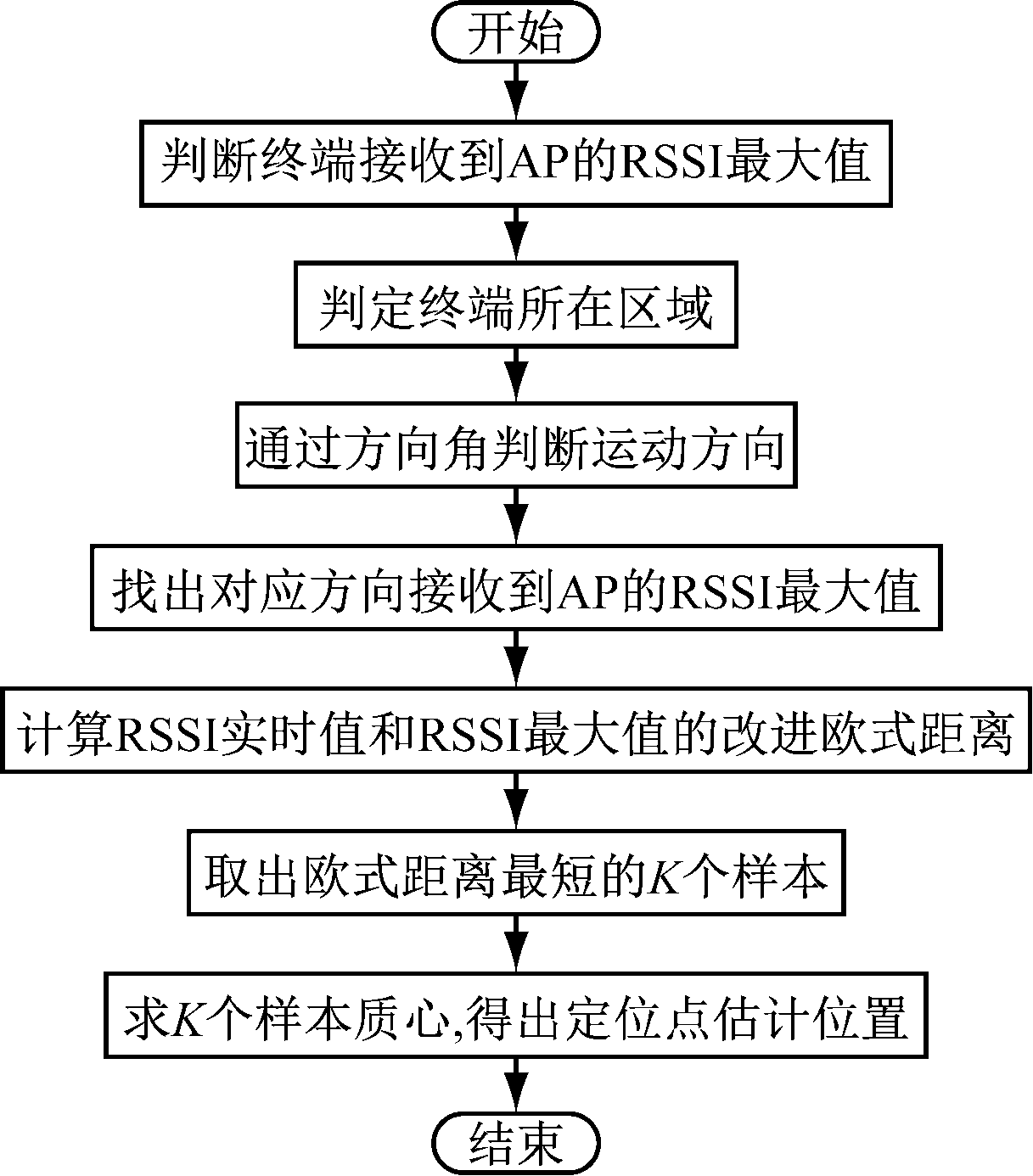
图5 定位匹配流程
Fig.5 Location matching process
2.4 EKF融合定位算法
定位服务器接收到智能终端发来的RSSI、惯性传感器数据后,通过PDR算法估计出运动步频、步长和方向角;将RSSI数据和方向角利用改进欧式距离和K近邻算法进行指纹匹配,估计出定位结果;最后利用WiFi定位获得PDR定位的初始位置,采用EKF进行融合定位。EFK融合定位流程如图6所示。
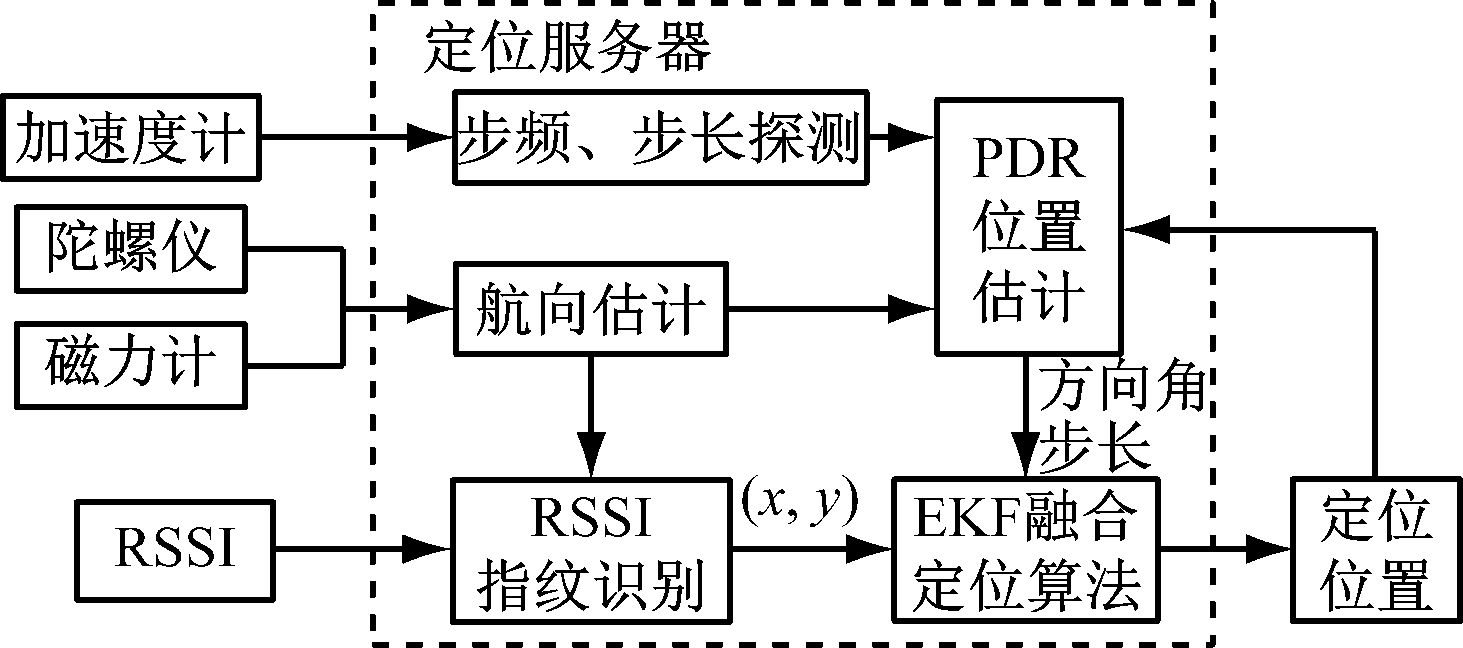
图6 EKF融合定位流程
Fig.6 EKF fusion location process
卡尔曼滤波包含预测和更新2个阶段。在预测阶段,使用上一次的估计值预测当前状态;在更新阶段,通过当前的测量值进一步优化预测阶段预测值。
系统状态模型[13-15]:
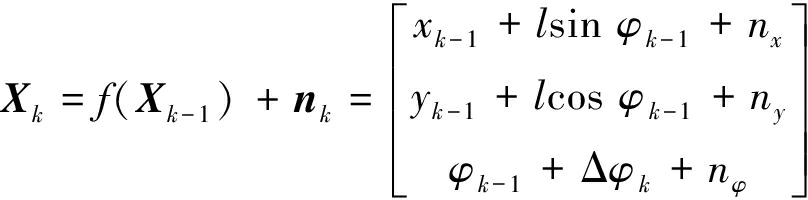
(6)
式中:Xk为k时刻的状态向量,Xk=[xk yk φk]T,(xk,yk)为k时刻的位置,φk为k时刻的方向角;f(Xk-1)为系统状态模型在k时刻与k-1时刻的非线性转换函数;nk为过程高斯白噪声矢量,nk=[nx ny nφ]T,nx,ny,nφ~(0,Qk),Qk为nk的协方差矩阵;Δφk为k时刻的方向角变化量。
矿井人员融合定位系统处于非线性工作状态,采用EKF将非线性状态模型线性化,得到k时刻状态转移矩阵近似值:
(7)
系统测量模型:
Zk=h(Xk)+wk
(8)
式中:Zk为k时刻的测量向量;h(Xk)为k时刻测量模型与状态模型的非线性转换函数;wk为观测高斯白噪声矢量,wk=[wx wy wφ]T,wx,wy,wφ~(0,Rk),Rk为wk的协方差矩阵。
采用EKF方程(式(9)—式(13))进行迭代运算,实现位置预测和估计。
(9)
(10)
Mk=![]() HT(H
HT(H![]() HT+Rk)-1
HT+Rk)-1
(11)
(12)
Pk=(I-MkH)![]()
(13)
式中:![]() 分别为系统k时刻状态的预测值和估计值;
分别为系统k时刻状态的预测值和估计值;![]() ,Pk分别为系统k时刻预测值协方差矩阵和估计值协方差矩阵;Mk为k时刻卡尔曼增益矩阵;H为测量矩阵;
,Pk分别为系统k时刻预测值协方差矩阵和估计值协方差矩阵;Mk为k时刻卡尔曼增益矩阵;H为测量矩阵;![]() 为k时刻测量向量的预测值,
为k时刻测量向量的预测值,![]() =h(
=h(![]() );I为单位矩阵。
);I为单位矩阵。
3 系统性能测试
在某瓦斯爆炸重点实验室长138 m、宽2.2 m、高2.33 m的模拟巷道内对矿井人员融合定位系统进行性能测试。模拟巷道中2个Ruckus AP(采用5 dBi全向天线)布局如图7所示。
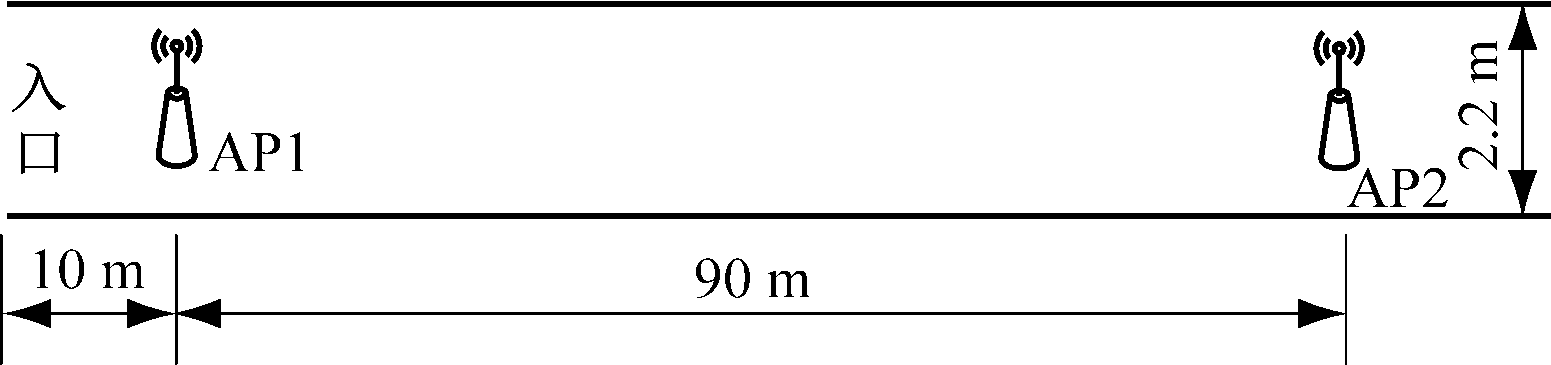
图7 模拟巷道AP布局
Fig.7 AP distribution in simulated tunnel
在离线采样阶段,测试人员手持智能终端,以AP1为起点,沿巷道中心线以1 m/s的速度匀速行进,终端每隔1 s采样1次,行至AP2时停止,重复10次,建立进入巷道指纹数据库。然后以AP2为起点,沿反方向匀速行进,行至AP1时结束,重复10次,建立离开巷道指纹数据库。
在定位匹配阶段,测试人员手持智能终端以1 m/s的速度沿定位路线AP1→AP2→AP1运动,重复进行15组测试。分别采用传统RSSI指纹定位算法、PDR算法和EKF融合定位算法进行定位,定位误差如图8所示。
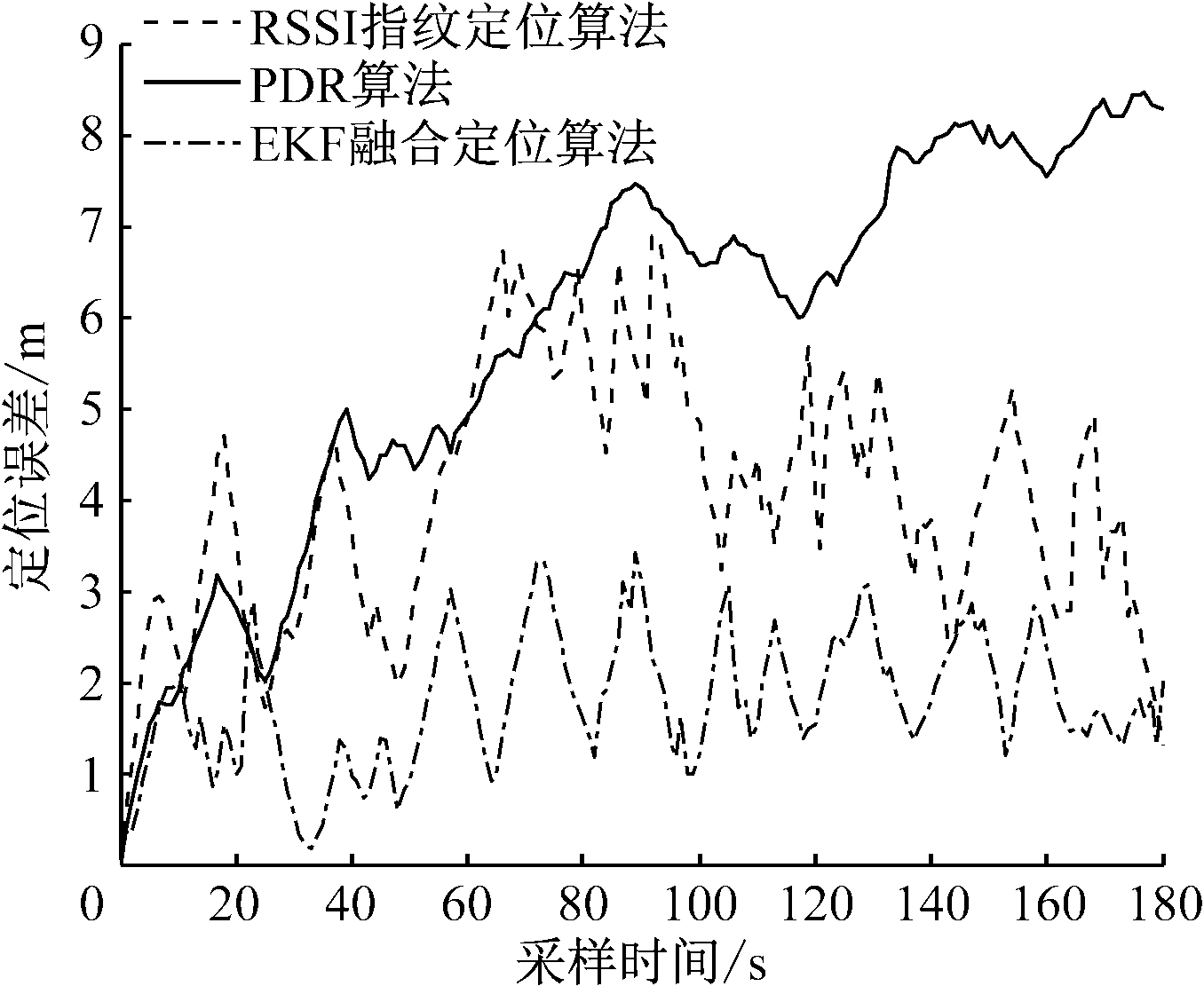
图8 3种定位算法的定位误差
Fig.8 Location error of three location algorithms
由图8可知,传统RSSI指纹定位算法误差跳动性较大,因测试者运动方向改变及身体遮挡等原因,进入巷道后定位误差明显比离开巷道时小,在接近AP时定位精度较高。PDR算法初始定位精度较高,但存在定位误差累计问题。当测试者行进约40 m后,误差超过4 m。EKF融合定位算法的定位误差较其他2种算法小。
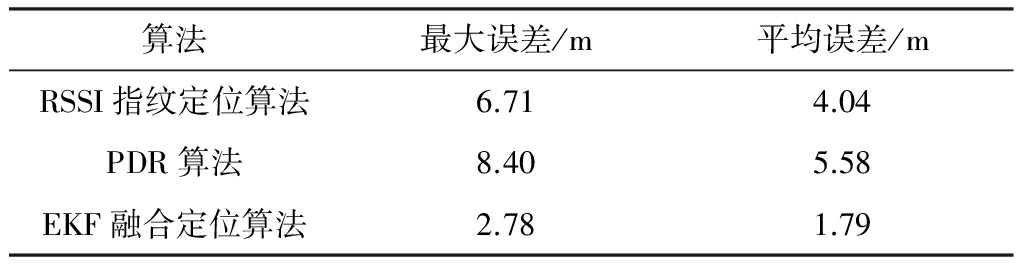
15组测试定位误差见表1。可看出采用RSSI指纹定位算法时,系统最大定位误差为6.71 m,平均误差为4.04 m。采用PDR算法时,系统测试位移总误差为4.67%(测试范围总位移为180 m);为便于对比,将偏移量转换为绝对误差量,得最大累计误差为8.40 m,15次测量的最大累计误差平均值为8.23 m,累计误差较大;整个定位过程平均误差为5.58 m。采用EKF融合定位算法时,系统最大定位误差为2.78 m,平均定位误差为1.79 m,精度明显高于其他2种算法,对于长达几千米的巷道而言,完全满足定位精度要求。
表1 3种定位算法的最大误差和平均误差
Table 1 The maximum error and average error of three location algorithms
4 结语
考虑煤矿井下环境特征和定位影响因素,充分利用井下现有WiFi网络,设计了一种矿井人员融合定位系统。该系统采用智能终端将采集的惯性传感器、RSSI和时间戳等数据上传到地面定位服务器,定位服务器采用基于改进RSSI指纹定位算法和PDR算法的EKF融合定位算法,实现井下人员定位。测试结果表明,该系统最大定位误差为2.78 m,平均定位误差为1.79 m,满足井下定位精度要求。
参考文献(References):
[1] 李论,张著洪,丁恩杰,等.基于RSSI的煤矿巷道高精度定位算法研究[J].中国矿业大学学报,2017,46(1):183-191.
LI Lun,ZHANG Zhuhong,DING Enjie,et al. Precision positioning algorithm in coal mine tunnel based on RSSI[J].Journal of China University of Mining & Technology,2017,46(1):183-191.
[2] 李论,丁恩杰,郝丽娜,等.一种改进的煤矿井下指纹定位匹配算法[J].传感技术学报,2014,27(3):388-393.
LI Lun,DING Enjie,HAO Lina,et al. An improved location fingerprint localization matching algorithm in coal mine[J].Chinese Journal of Sensors and Actuators,2014,27(3):388-393.
[3] 王桃.基于位置指纹的煤矿井下定位算法研究[D].徐州:中国矿业大学,2015.
[4] 李世银,王铨,张楠.基于MEMS惯性传感器的井下人员定位系统[J].煤矿安全,2017,48(4):111-114.
LI Shiyin,WANG Quan,ZHANG Nan. Underground personnel positioning system based on MEMS inertial sensors[J]. Safety in Coal Mines,2017,48(4):111-114.
[5] 马京,胡青松,宋泊明,等.基于指纹膜与航迹推算的井下人员定位系统[J].工矿自动化,2016,42(5):19-23.
MA Jing,HU Qingsong,SONG Boming,et al. Underground personnel positioning system based on fingerprint and dead-reckoning[J].Industry and Mine Automation,2016,42(5):19-23.
[6] 吴静然,李秀凤,吴倩.基于WiFi的煤矿井下智能终端设计[J].工矿自动化,2013,39(4):5-8.
WU Jingran,LI Xiufeng,WU Qian.Design of underground intelligent terminal based on WiFi[J].Industry and Mine Automation,2013,39(4):5-8.
[7] 杨海,李威,罗成名,等.基于捷联惯导的采煤机定位定姿技术实验研究[J].煤炭学报,2014,39(12):2550-2556.
YANG Hai,LI Wei,LUO Chengming,et al. Experimental study on position and attitude technique for shearer using SINS measurement[J].Journal of China Coal Society,2014,39(12):2550-2556.
[8] LEVI R W,JUDD T. Dead reckoning navigational system using accelerometer to measure foot impacts:US5583776[P].1996-10-12.
[9] WEINBERG H. Using the ADXL202 in pedometer and personal navigation applications[EB/OL].[2017-10-10].http://www.docin.com/p-1743985325.html.
[10] HASTIE T,TIBSHIRANI R. Discriminant adaptive nearest neighbor classification[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence,1996,18(6):607-616.
[11] 刘晓文,张秀均,郝丽娜,等.基于WI-FI的井下定位算法研究[J].传感技术学报,2012,25(6):854-858.
LIU Xiaowen,ZHANG Xiujun,HAO Lina,et al. Research on underground fingerprint localization algorithm based on WI-FI[J].Chinese Journal of Sensors and Actuators,2012,25(6):854-858.
[12] 原野.室内WiFi指纹定位系统中的半监督训练方法研究[D].上海:上海交通大学,2015.
[13] 姚志锋.基于WiFi和惯性传感器的多信息融合室内定位系统的设计与实现[D].广州:华南理工大学,2016.
[14] 陈国良,张言哲,汪云甲,等. WiFi-PDR室内组合定位的无迹卡尔曼滤波算法[J].测绘学报,2015,44(12):1314-1321.
CHEN Guoliang,ZHANG Yanzhe,WANG Yunjia,et al.Unscented Kalman filter algorithm for WiFi-PDR integrated indoor positioning[J].Acta Geodaetica et Cartographica Sinica,2015,44(12):1314-1321.
[15] 孙继平,李晨鑫.基于卡尔曼滤波和指纹定位的矿井TOA定位方法[J].中国矿业大学学报,2014,43(6):1127-1133.
SUN Jiping,LI Chenxin.Mine time of arrival positioning method based on Kalman filtering and fingerprint positioning[J].Journal of China University of Mining & Technology,2014,43(6):1127-1133.