0 引言
现阶段中国综采工作面两巷支护、运输及辅助设备相比综采工作面内部“三机一架”的机械化、自动化水平存在较大差距,制约着综采自动化生产持续、快速发展[1-2]。一方面,大多数煤矿采区采用的巷道支护、运输及辅助设备,如单体立柱、超前支架、转载机、带式输送机机尾、设备列车、单轨吊均使用人工手动操作,工人劳动强度大,设备运行效率低,严重影响工作面快速推进[3-4]。另一方面,综采工作面液压支架与两巷设备之间采用分段、分散的人工就地控制方式,工作效率低,限制了综采工作面及两巷设备协同推进。因此,本文提出了一种综采工作面及两巷设备协同推进控制技术方案。该方案以综采工作面两巷支护、运输及辅助设备自移控制技术为基础,以基于Ethernet/IP通信协议的工业以太网为协同控制通信平台,以协同推进控制流程为决策依据,可有效实现综采工作面及两巷设备协同控制、快速推进。
1 技术架构
(1) 单机设备层:实现综采工作面及两巷单个设备的自动化控制,将设备由原有人工就地控制改变为单机自动控制。
(2) 网络通信层:利用综采工作面工业以太网将各单机设备控制系统统一在同一通信网络中,并通过Ethernet/IP协议实现通信协议标准化。
(3) 协同控制层:协同控制上位机作为决策终端,实现对综采工作面生产过程监测及工艺识别,为设备间协同控制提供决策。
2 关键技术
2.1 设备自移控制技术
2.1.1 支护设备自移控制技术
《煤矿安全规程》规定综采工作面两巷顶板超前支护范围不能小于20 m[5],同时由于矿井开采过程中的矿压显现,通常情况下巷道超前50 m范围内顶板破碎下沉,底鼓、煤壁片帮严重[6],所以对于自移式巷道支护设备而言,不但需要具备较好的支护强度,能够支护巷道内受采动影响的超前支护段顶板,还需要一种合适的前移结构,将巷道永久支护或采用单体立柱支护方式替换为随工作面推进而前移的迈步式自移方式。
针对综采工作面巷道收敛变形规律提出的迈步自移式支护装置不但可有效加强巷道超前段及端头后方巷道的顶板支护,保证工作面采煤作业顺利进行[5],而且引入的电液控制系统将原有的人工手动操作改为电控操作,配合自动控制程序可实现装置自动前移。通常情况下迈步自移式支护装置处于支撑状态,当工作面推进时,该装置根据巷道围岩条件进行自动降柱、推移及支撑等动作[6-7]。
2.1.2 运输设备自移控制技术
高产高效综采工作面对于运输巷内转载机、带式输送机的快速前移提出了很高要求[8-9]。采用迈步自移式转载机及带式输送机自移机尾,并通过引入电液控制系统,可实现转载机、带式输送机机尾的自动前移,达到工作面快速推进目标。
迈步自移式转载机采用2组千斤顶,并配合特殊抬起座和导轨,可实现推移机身与拉移导轨互为支点的迈步式前移。带式输送机自移机尾通过设置前左、前右、后左、后右4个升降千斤顶实现机身抬升、落下,通过左右推移千斤顶实现机身前移,同时配置左右水平千斤顶、托辊千斤顶实现机身姿态调整。通过转载机与带式输送机搭接的变化,在保证转载机运输连续性的同时,减少带式输送机拉伸输送带次数,缩短辅助工时,加快采煤速度,提升生产效率。
2.1.3 辅助设备自移控制技术
在综采方式下,为便于大型机电设备高速、连续、自动化运行管理,所有供变电站、泵站、组合开关及工作面巷道监控设备部署在距采煤工作面切眼40~200 m的设备列车上。随着工作面向前推进,设备列车需克服底板起伏、巷道上下坡度及移动过程中电缆布置、回收等困难,跟随向前移动[10]。
迈步自移式设备列车驱动采用液压牵引、电液控制方式,升降式平板列车、自移式牵引装置及可移动轨道组件相互配合等关键技术可实现设备列车安全、快速、交替式前移,从而提高设备列车整体稳定性[11]。悬挂自移式设备列车行驶于挂接在巷道顶部的柔性单轨轨道上,以液压为动力,集成设备自移、电缆自移、电缆回收等功能,其采用自移控制方式可实现设备列车分段推移前进[12]。
2.2 协同控制通信平台
煤矿综采工作面是涉及多设备协同、统一调度运行的复杂生产过程,设备种类及型号多、通信控制接口及协议复杂的情况给数据集成、统一接入、远程监控等技术实施带来了困难[13-14]。因此亟需一种统一的通信协议技术,以便满足现有设备间的通信。Ethernet/IP作为一种基于标准以太网的应用层协议,其良好的兼容性、通信实时性及可扩展性较其他工业以太网协议具有突出优势。
综采工作面及两巷设备的电液控制系统采用现场总线通信方式,该通信方式可实现各系统内部数据的有效传输,但如果多个系统总线直接连接在一起,会造成各系统间互相干扰。因此需要一种协议转换设备将各设备的电液控制系统内部总线数据进行隔离,同时将各设备的电液控制系统统一在工业以太网平台上,实现各设备间数据交互。Ethernet/IP网关可作为协议转换设备,根据实际设备情况灵活布置,实现电液控制系统总线数据与Ethernet/IP协议数据转换。Ethernet/IP网关对数据处理能力、数据收发的实时性和可靠性较商用以太网有着更严格的规范和要求[15],其硬件设备开发分为2种方式:一种是芯片级开发方式,根据外围接口类型、数目需求,选择合适的微处理器、以太网芯片等,通过移植Ethernet/IP协议实现产品化;另一种是直接采用集成Ethernet/IP的板卡或模块,实现设备快速开发。
不论综采工作面及两巷设备的电液控制系统有多少控制单元,均只需配置1个Ethernet/IP网关即可就近接入工作面工业以太网中,实现2种通信协议间的数据转换。该部署方式一方面在单机设备层可保证各电液控制系统的总线独立,另一方面在网络通信层实现了各设备与上位机的以太网通信,为设备间协同推进控制提供通信平台。综采工作面及两巷设备协同控制通信平台如图1所示。
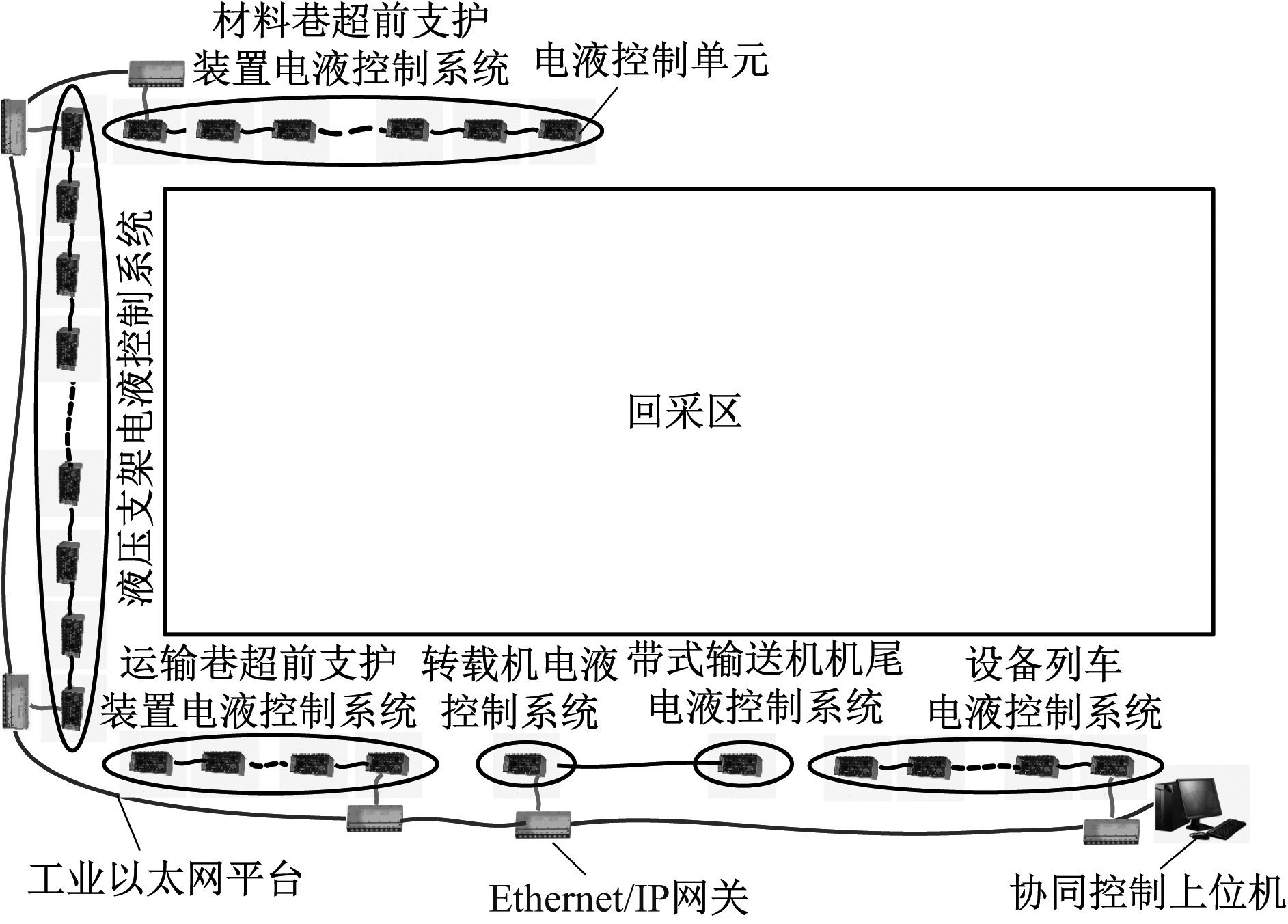
图1 综采工作面及两巷设备协同控制通信平台
Fig.1 Cooperative control communication platform of equipments on fully-mechanized coal mining face and two-roadways
2.3 协同推进控制流程
2.3.1 综采工作面生产工艺
利用计算机分析技术将综采工作面生产过程提炼为连续的多个不同生产工艺阶段,在实际生产过程中,以采煤机运行位置及开采方向为判断依据,实现生产工艺阶段自动识别并转换(初始生产工艺阶段需要人工进行确定)。生产工艺阶段转换点被认为是采煤机运行的关键点。当采煤机运行到关键点后,启动本阶段相关设备间的协同控制逻辑,按照不同生产工艺阶段的生产控制流程,实现相关区域设备自动化控制。
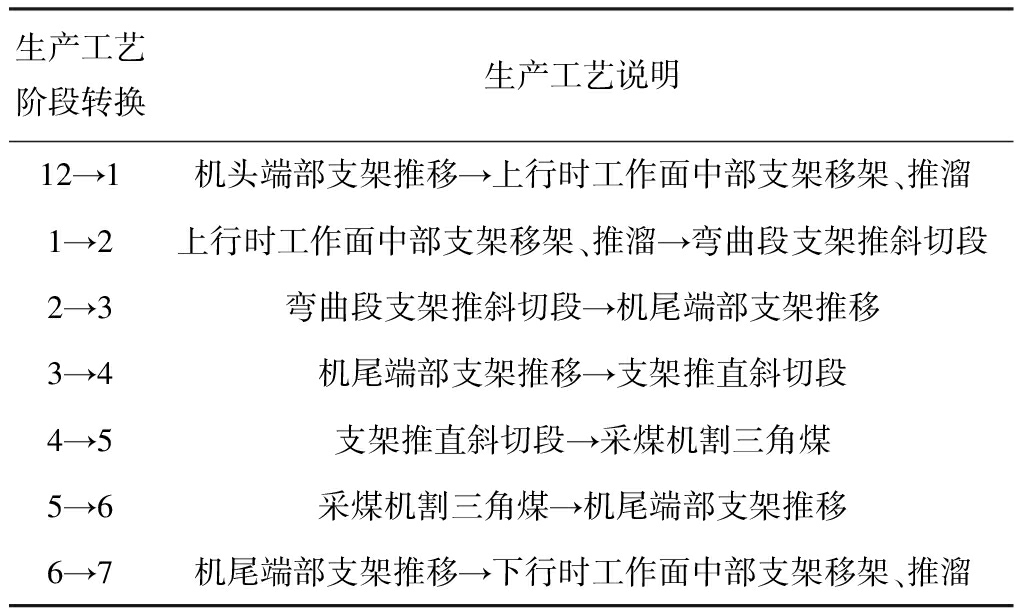
按照采煤机运行轨迹将综采工作面1次生产循环过程归纳为12个生产工艺阶段,综采工作面生产工艺阶段转换流程示意如图2所示,图中采煤机运行轨迹上三角形标注的点是生产工艺阶段转换点。当采煤机按照运行方向从转换点一侧越到另一侧时,可认为生产工艺转换到下一阶段并开始新阶段的控制流程。上行生产工艺阶段转换过程见表1。由于上下行生产工艺基本对称,对下行生产工艺不再赘述。

图2 综采工作面生产工艺阶段转换流程示意
Fig.2 Production process stage conversion schematic of fully-mechanized coal mining face
表1 上行生产工艺阶段转换过程
Table 1 Process stage conversion of upward production
2.3.2 控制流程
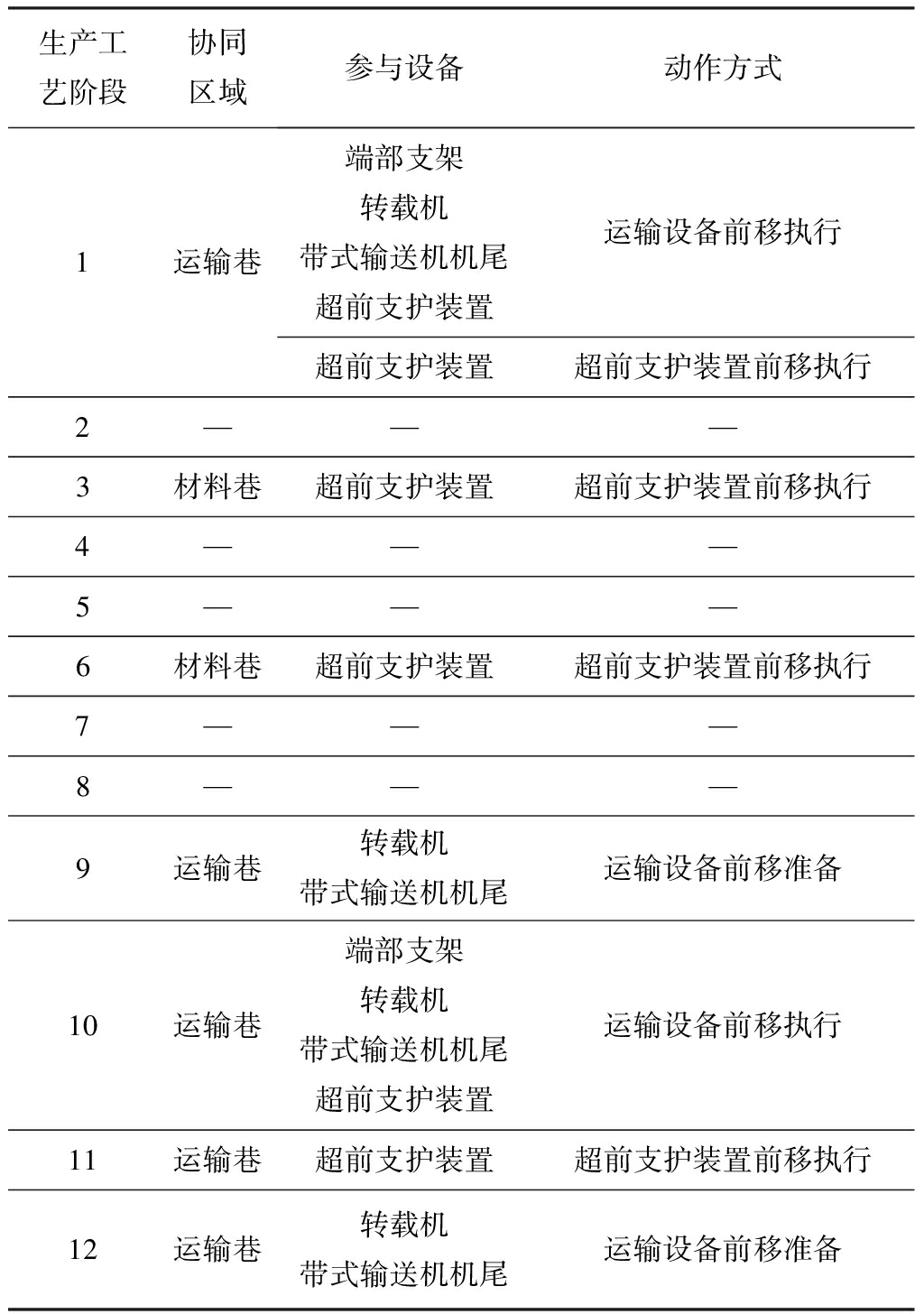
实际生产过程中,由于相关设备间通过推移千斤顶连接,生产控制时需要关联控制、整体推进。上位机将各阶段过程中各类设备需要执行的控制流程转换为协同控制逻辑算法,当采煤机按照生产工艺开采运行到生产工艺关键点时,触发该生产工艺阶段控制过程,具体参与设备及动作方式见表2。上位机将控制指令发送给相关设备,实现相关联设备的整体联动控制。
表2 综采工作面及两巷设备协同控制方式
Table 2 Equipments cooperative control mode on fully-mechanized coal mining face and two-roadways
(1) 材料巷设备与工作面协同推进。材料巷迈步自移式超前支护装置共12架,其中每3架通过推移千斤顶连接成为一体,因此可依照支架连接关系将超前支护装置分成4组,在超前支护装置进行前移时,每组支架实现连续推进控制。
当工作面生产进入工艺阶段3和6,刮板输送机机尾端部支架完成前移后,要求刮板输送机机尾所在材料巷的支护装置完成交替式自动前移,为下一循环推进做好准备。
(2) 运输巷设备与工作面协同推进。刮板输送机机头端部支架推移千斤顶与转载机后部连接,运输巷超前支护装置推移千斤顶与转载机底座连接,转载机与带式输送机自移机尾共用前移轨道,运输巷设备在工作面前移推进过程中需要协同控制,实现同步推进。
当工作面生产进入工艺阶段9后,运输巷及其相关联的工作面刮板输送机机头设备需要进行第1次整体推进。在工艺阶段9中,转载机、带式输送机机尾抬起,做好前移准备工作;在工艺阶段10中,端部支架、转载机、带式输送机机尾间协同控制,执行第1次自动前移;在工艺阶段11中,运输巷超前支护装置按照前移顺序自动前移,为下一循环推进做好准备。
当工作面生产进入工艺阶段12后,运输巷及其相关联的工作面刮板输送机机头设备需要进行第2次整体推进。在工艺阶段12完成运输设备前移准备工作,在工艺阶段1实现运输设备前移后由上位机发出超前支护装置前移控制指令,实现超前支护装置前移。
(3) 设备列车与工作面协同推进。当工作面生产经过若干个全工艺循环后,需要设备列车前移,自移设备列车按照前移顺序执行自动前移控制,实现设备列车推进。
采煤机到达生产工艺关键点触发各阶段相关设备关联控制后,上位机发出相关Ethernet/IP协议控制指令,Ethernet/IP网关将Ethernet/IP协议控制指令转换为电液控制系统总线控制指令,发送给各相关设备的电液控制系统。电液控制系统接收到指令后,按照预先设定的设备前移控制逻辑执行相关控制动作,实现综采工作面及两巷设备的协同推进。
3 结语
采用综采工作面及两巷设备协同推进控制技术能够将分散、独立的综采工作面及两巷设备统一在同一协同控制通信平台上,实现设备间高效、自动协同控制。随着综采工作面少人化、设备自动化运行模式的推广实践,该技术将极大降低作业人员劳动强度,改善工作环境,减少工作面端头及巷道作业人员数量,达到工作面快速、高效推进的目的。
参考文献(References):
[1] 王海军.数字式智慧综采工作面集控系统研究[J].煤炭科学技术,2017,45(1):135-141.
WANG Haijun.Study on centralized control system of digital fully-mechanized coal mining face[J].Coal Science and Technology,2017,45(1):135-141.
[2] 周信.综采装备协同控制关键技术研究[D].徐州:中国矿业大学,2014.
[3] 高峰.煤矿井下辅助运输系统设计方法与智能调度研究[D].青岛:山东科技大学,2011.
[4] 李建升.单轨吊运输在综采综掘工作面的应用实践[J].煤炭工程,2011(9):58-59.
LI Jiansheng.Application and practice of monorail locomotive transport system in integrated coalface of mining tunnel[J].Coal Engineering,2011(9):58-59.
[5] 宋大成.安全生产标准化[M].北京:煤炭工业出版社,2009.
[6] 闫殿华,周凯,王本林.迈步分体式超前支护支架的研制与应用[J].煤炭科学技术,2014,42(5):81-83.
YAN Dianhua,ZHOU Kai,WANG Benlin.Development and application of step-separation advanced support[J].Coal Science and Technology,2014,42(5):81-83.
[7] 张健东.自移式超前支架应用及分析[J].煤炭科学技术,2013,41(增刊1):136-137.
ZHANG Jiandong.Application and analysis of self-motion advanced hydraulic support[J].Coal Science and Technology,2013,41(S1):136-137.
[8] 王峰.综采无人工作面自动化开采技术研究与应用[J].工矿自动化,2015,41(7):5-9.
WANG Feng.Research and application of automatic mining technology of unmanned fully-mechanized coal mining face[J].Industry and Mine Automation,2015,41(7):5-9.
[9] 冉献宝.SZZ800-200型迈步自移式转载机的应用[J].煤炭技术,2005,24(6):14-15.
[10] 宁振兵.单轨自移设备列车系统的设计及应用[J].机械工程与自动化,2014(2):214-215.
NING Zhenbing.Design and application of self-moving monorail train system[J].Mechanical Engineering and Automation,2014(2):214-215.
[11] 朱世德,石宁,潘江如.迈步式设备列车自移装置的设计及应用[J].科技资讯,2011(22):31-32.
[12] 王念安.浅谈关于煤矿在用设备列车自移装置[J].科技资讯,2015(12):91-92.
[13] 马世平.现场总线标准的现状和工业以太网技术[J].机电一体化,2007,13(3):6-8.
[14] 何广东.煤矿机电设备EtherNet/IP通信协议标准化研究[J].通讯世界,2015(22):15-17.
[15] 李武杰,郑晟,陈文辉.Ethernet/IP工业以太网的研究及应用[J].电子设计工程,2011,19(9):26-29.
LI Wujie,ZHENG Sheng,CHEN Wenhui.Research and application of Ethernet/IP industrial Ethernet[J].Electronic Design Engineering,2011,19(9):26-29.