0 引言
目前,我国矿井在用的液压支架架型较多,不同项目应用的液压支架电液控制系统需要检测的设备状态和工况环境的信息也呈现多元化、多样化的特征。由于各个综采工作面采煤工艺不尽相同,液压支架动作也不一致,所以,造成液压支架电液控制系统的多样化和测试的复杂化。
现有液压支架电液控制系统的测试一般采用模拟测试和实物测试2种方法。模拟测试通过变阻器手动模拟传感器数据变化过程,利用负载指示灯确定电磁阀口状态,通过测试人员观察和记录代表电磁阀的负载指示灯状态来判断系统的控制功能和控制逻辑是否与实际需求符合。该方法测试简单、操作简便,但是缺少精确的测试过程数据,测试人员工作强度较大。
实物测试是将控制系统连接到液压支架实物或实物模型上进行测试。近年来,在液压支架电液控制系统测试技术的研究方面,针对工况和传感器的模拟基本上是采用实物模拟方法。例如通过电液比例阀控制液压缸的压力和伸缩速度,以模拟液压支架立柱压力和推移速度的变化规律,为电液控制系统提供测试所需的传感器信号,再现液压支架工作时的真实状态[1];利用液压支架、采煤机、刮板输送机三机配套模型模拟煤矿井下综采工作面工况[2]。该方法测试过程直观,容易发现问题,但是液压支架实物或模型需要根据具体的项目配套配置多种传感器,部件动作的执行也需要额外的动力源,成本较高。
以上2种方法均无法模拟连续变化的综采工作面顶底板条件,无法有效地进行环境工况的适应性测试。针对现有测试方法存在的问题,本文根据液压支架电液控制系统的基本组成和工作原理,研制了基于数字模拟技术的液压支架电液控制系统自动化测试平台。该测试平台基于SAC型液压支架电液控制系统设计,可以根据具体的综采工作面应用配套实现检测装置端口功能自动化配置和管理、控制系统基本功能测试、控制系统对综采工作面工况适应性测试及测试过程的自动化执行、测试数据存储和发布等。
1 液压支架电液控制系统
液压支架是煤矿开采的主要装备,液压支架电液控制系统是实现液压支架自动化的必要手段,融合了液压、控制、传感器检测、通信、计算机技术等,在我国综采工作面已经得到了普遍推广与应用。液压支架电液控制系统的应用替代了人工手动操作,通过液压支架的程序控制实现了单个支架的单动作控制、成组支架动作的顺序程序控制,实现了以液压支架跟机自动控制为主、人工远程干预为辅的自动化生产模式[3-4],降低了煤矿工人的劳动强度,提高了煤矿生产效率,为煤矿用户带来了巨大的经济效益[5]。
SAC型液压支架电液控制系统的核心控制部分由支架控制器、偶合器、压力传感器、行程传感器、电源箱、电磁先导阀、整体插装式多功能换向阀和连接器等组成[6-7],系统布置如图1所示,系统工作原理如图2所示。
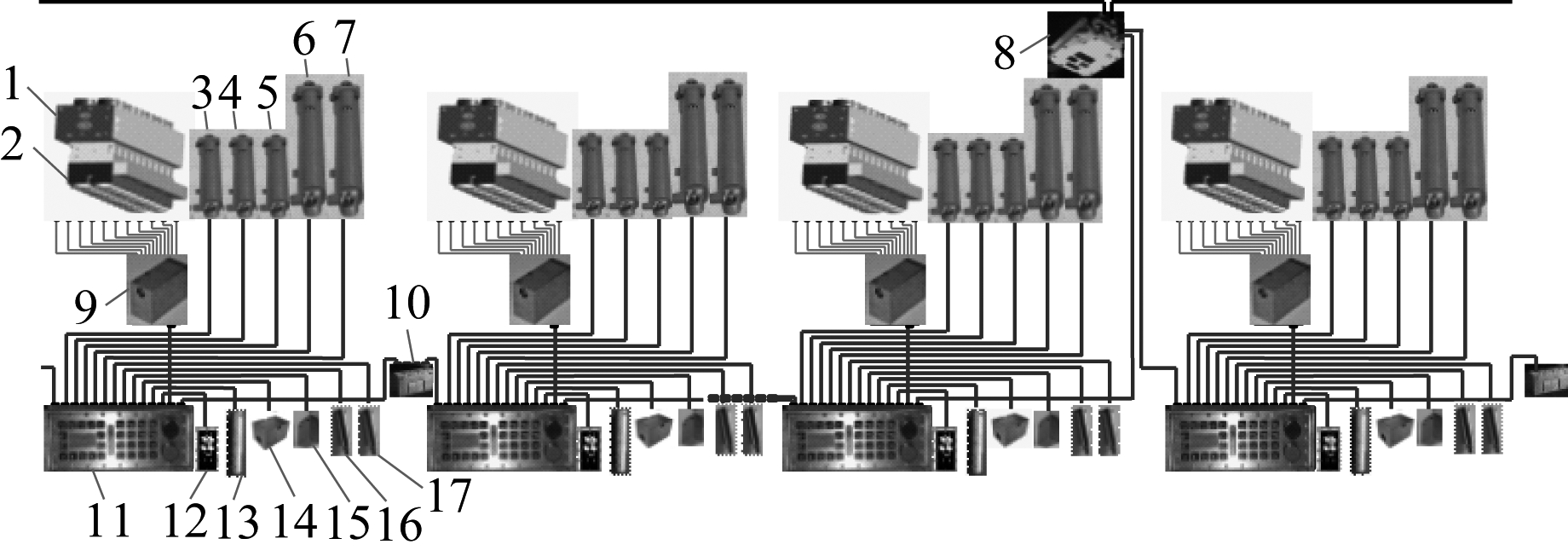
1-主控阀组;2-电磁阀组;3-护帮板行程传感器;4-尾梁行程传感器;5-插板行程传感器;6-推溜行程传感器;7-推移行程传感器;8-电源箱;9-驱动器;10-隔离偶合器;11-支架控制器;12-放煤键盘;13-红外传感器;14-倾角传感器;15-振动传感器;16-前柱压力传感器;17-后柱压力传感器
图1 液压支架电液控制系统布置
Fig.1 Layout diagram of electro-hydraulic control system of hydraulic support
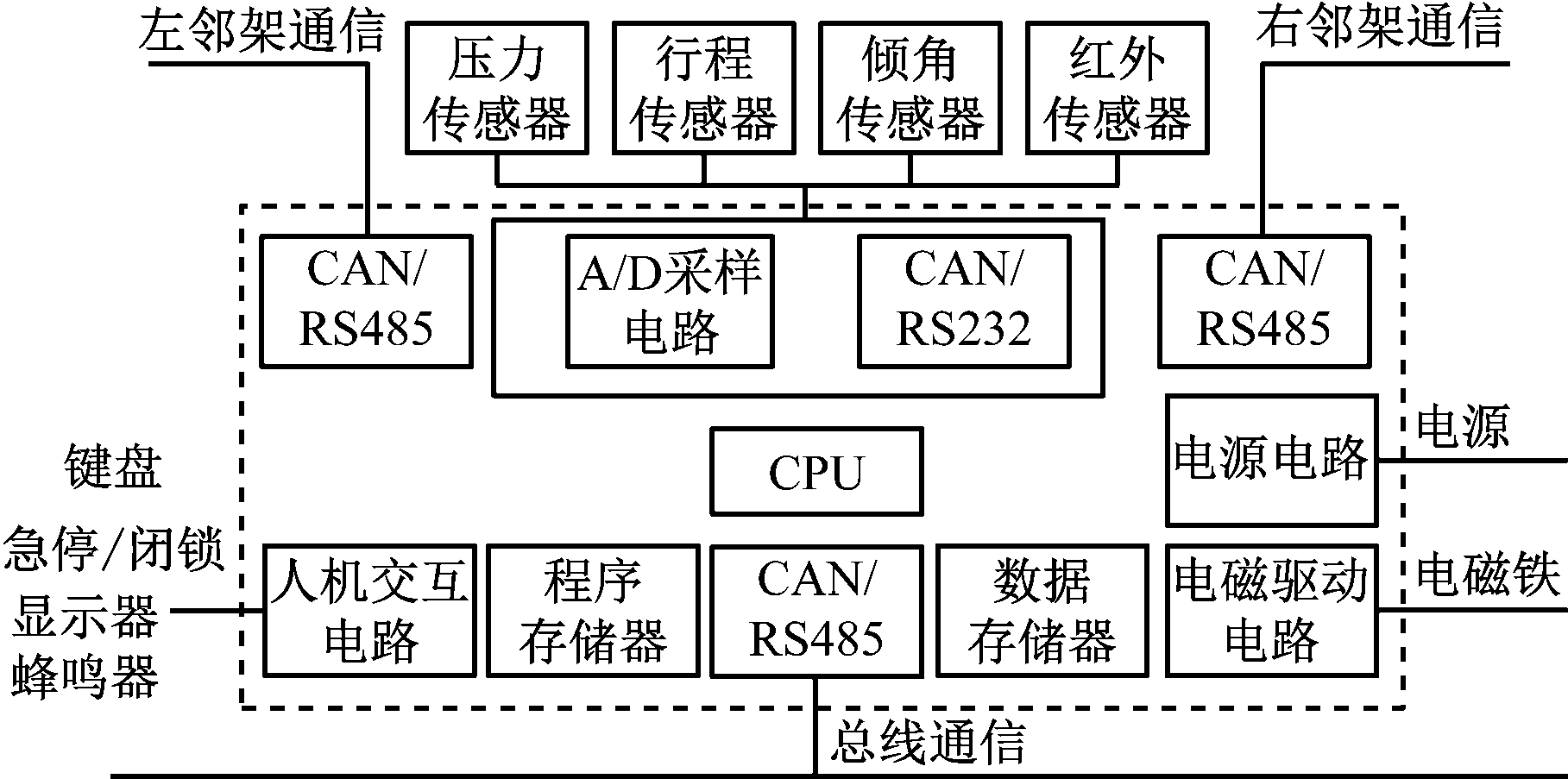
图2 液压支架电液控制系统工作原理
Fig.2 Working principle of electro-hydraulic control system of hydraulic support
2 测试平台组成及工作原理
根据液压支架电液控制系统的组成和工作原理设计的液压支架电液控制系统测试平台由多个检测装置和测试管理平台组成。测试平台收集现场电液控制系统运行过程中的传感器数据并下载到测试系统中,通过控制系统与测试平台进行相互融合,实现现场环境工况的实验室仿真测试[8]。测试平台的主要组成如图3所示。
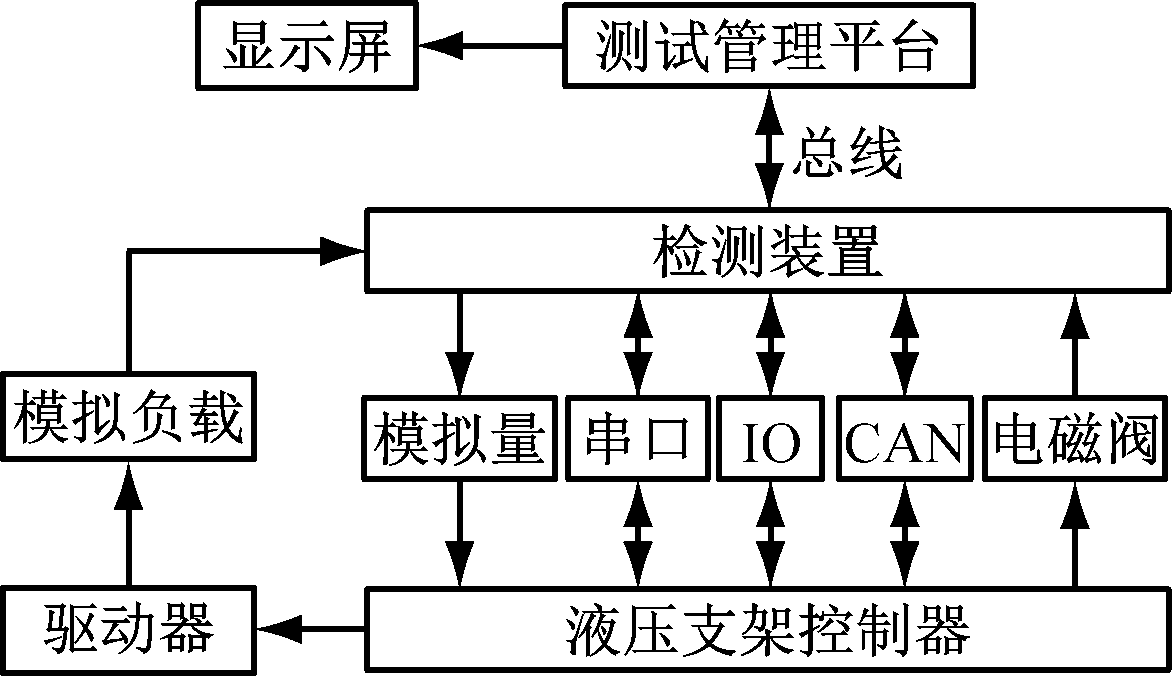
图3 测试平台主要组成
Fig.3 Main composition of test platform
检测装置和液压支架控制器连接,根据测试管理平台的指令完成多功能传感器模拟功能的切换、控制器电磁阀口输出信号的检测,各个检测装置之间通过RS485和以太网方式互连组网。检测装置实现对传感器变化过程的数字模拟和复现,为液压支架控制器创造“真实的综采工作面数字环境”,以进行实际综采工作面运行数据的复现和系统运行工况的模拟。
测试管理平台实现对测试用例的管理、检测装置电路端口功能的自动配置、典型工况下各种传感器数据变化过程的模拟或实际综采工作面液压支架电液控制系统运行数据的下载[9],以及检测装置检测结果的自动收集和判定,并自动出具测试报告。
3 检测装置设计
根据液压支架控制器的特点,检测装置硬件电路实现的功能包括:42路模拟信号采集、8路模拟信号输出、2路CAN信号监测、2路RS485通信、3路串口通信、液晶显示输出等,检测装置电路主要原理框图如图4所示。
检测装置硬件电路主要功能模块分为CPU模块、CAN模块、UART模块、继电器选通模块、AD转换模块、DA转换模块、隔离模块等。
(1) CPU模块:包括CPU最小系统(SRAM、Flash、存储器、JTAG接口)、电源系统(12,3.3,1.8 V)、串口通信模块等。CPU模块作为检测装置的主体和大脑,用于完成各类传感器模拟数据的转换、通信信号和模拟信号的采集处理、任务调度及外围模块的电源供给。
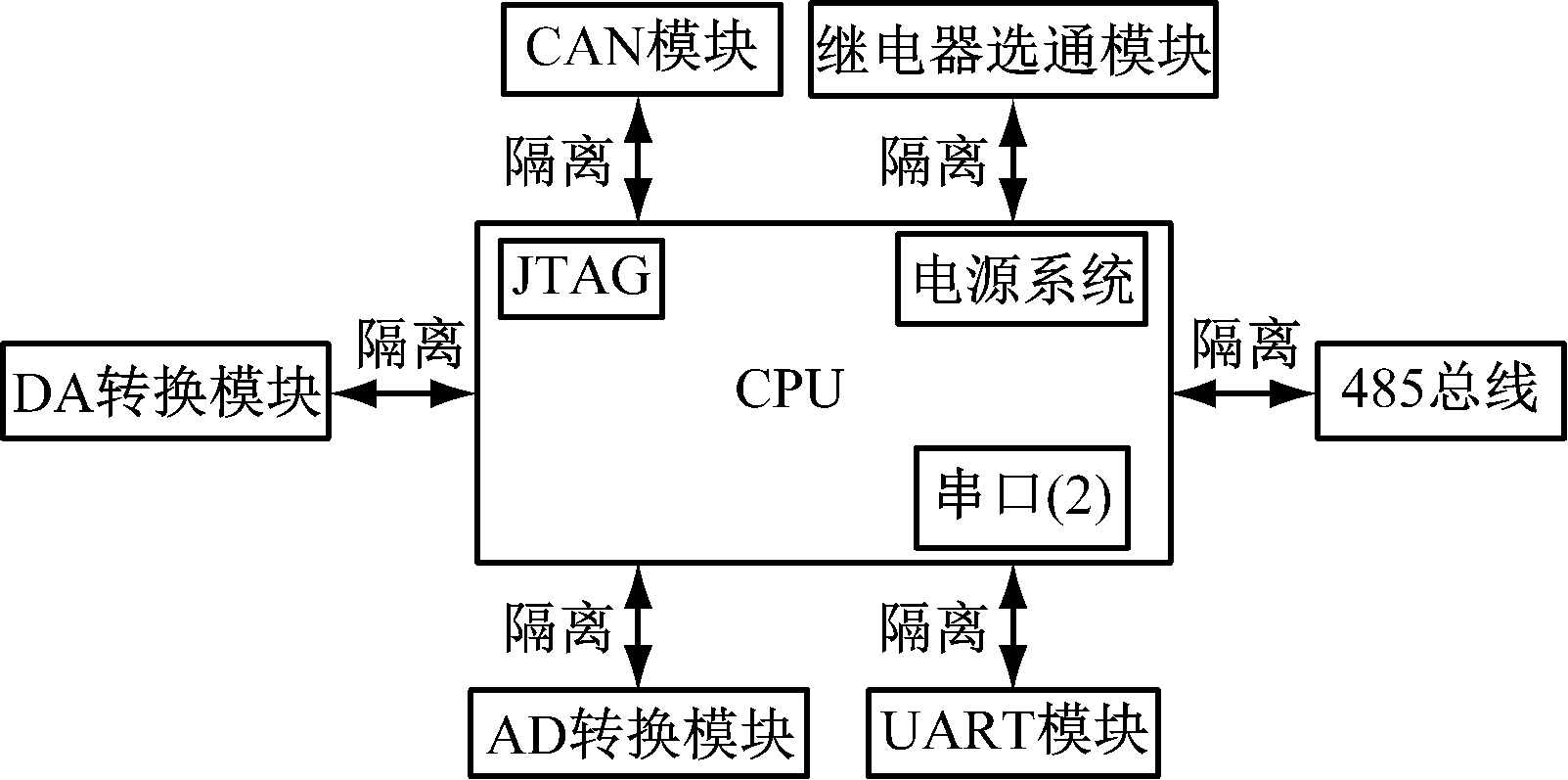
图4 检测装置电路主要原理
Fig.4 Main principle block diagram of detection device circuit
(2) CAN模块:包括2个单线CAN接口及其相应的驱动电路,用于实时监测被测系统的通信数据。
(3) UART模块:UART总线共4路,1路RS485总线,用于实现检测装置和测试管理主机的数据通信;3路RS232总线,根据具体传感器的通信协议实现对被测系统串口类传感器的模拟。
(4) 继电器选通模块:该模块可实现检测装置1个端口的2个复用功能自动切换,使用CPU的IO端口控制继电器的选通,使检测装置同一端口可实现模拟量输出和模拟量检测2个功能的切换。
(5) AD转换模块:通过TLC系列A/D采集模块采集电磁阀输出口负载的电压、电流,并根据功率计算判断电磁阀口的驱动能力是否能够正常驱动配套的电磁阀。
(6) DA转换模块:通过DAC7574控制器将数字信号转换为模拟电压,并连接到液压支架控制器的模拟输入端。
(7) 隔离模块:为了保证测试平台和被测系统的独立性,减少外接电源对测试结果的影响,检测装置和液压支架控制器之间的信号全部经过ADUM系列磁隔离或光耦芯片隔离,确保检测装置和液压支架控制器之间信号互联、电源独立。
检测装置模拟液压支架动作过程中各类传感器数据的变化过程,根据经验需要每20 ms转换一组传感器数据,包括行程、压力、一级护帮压力、一级护帮限位、倾角数据等。检测装置核心处理器采用LPC2X系列微控制器,该系列微控制器是基于一个支持实时仿真和跟踪的16/32 bit ARM7TDMI-S CPU的微控制器,并带有128/256 KB嵌入式高速Flash存储器。128 bit宽度的存储器接口和独特的加速结构使32 bit代码能够在最大时钟速率(60 MHz)下运行[10],DAC7574响应时间为7 μs,确保一位数据转换能够在2 ms以内完成,为检测装置的高效执行和后期功能扩展提供了保障。
4 测试管理平台设计
4.1 测试管理平台主要功能
测试管理平台主要实现检测装置端口功能自动配置、检测结果自动收集,并以图形化方式展现,根据测试用例,判断每项测试的结果,并自动出具测试报告。测试管理平台软件功能树如图5所示。
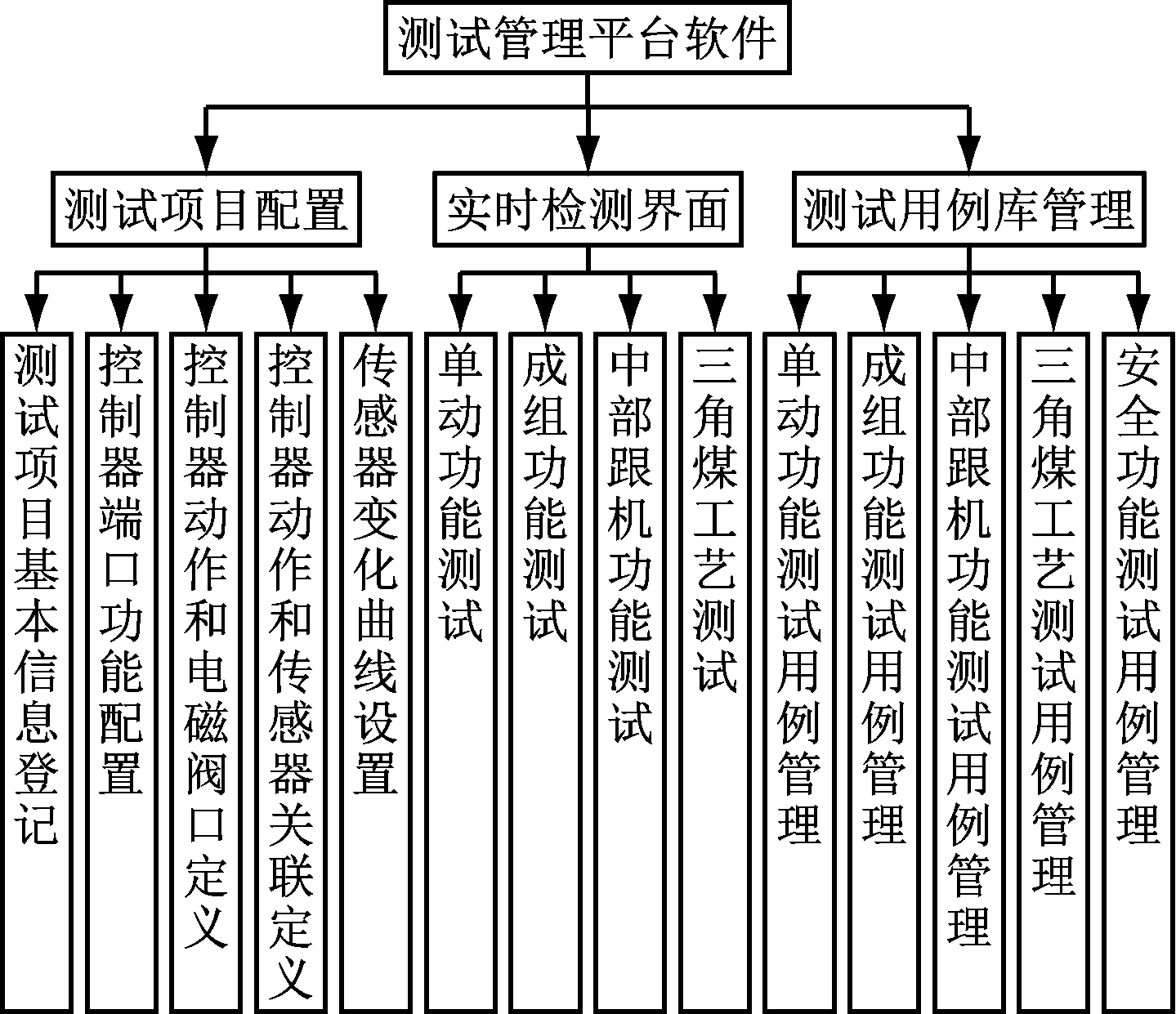
图5 测试管理平台软件功能树
Fig.5 Function tree of software of test management platform
(1) 测试项目基本信息登记:内容包括项目名称、控制器类型、版本号等信息。
(2) 控制器端口功能配置:根据具体的应用项目配套信息,测试管理平台完成对检测装置复用端口的实际应用功能配置,控制器端口功能配置界面如图6所示。
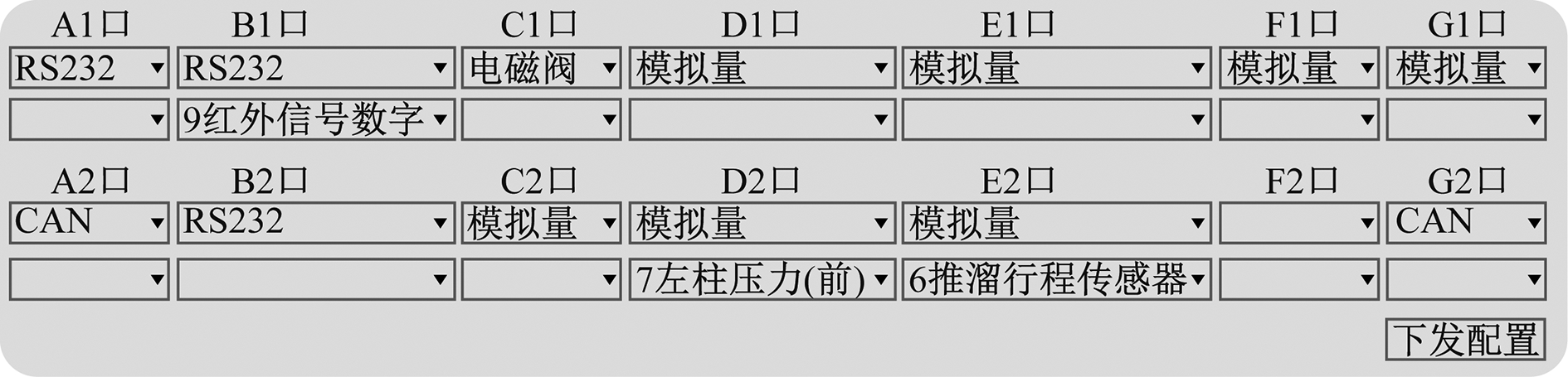
图6 控制器端口功能配置
Fig.6 Function configuration of controller port
(3) 控制器动作和电磁阀口定义:根据具体的应用项目控制功能,实现控制器的电磁阀输出口与实际支架构件控制动作的定义,如图7所示。
(4) 控制器动作与传感器关联定义:主要用于实现控制器动作过程中关联的传感器变化过程的同步模拟。根据该定义,检测装置在检测到控制器执行相关动作的过程中,自动执行与该动作关联的传感器模拟输出,使得控制器在控制液压支架动作过程中相关联的传感器数值同步发生变化。控制器动作和传感器关联定义如图8所示。
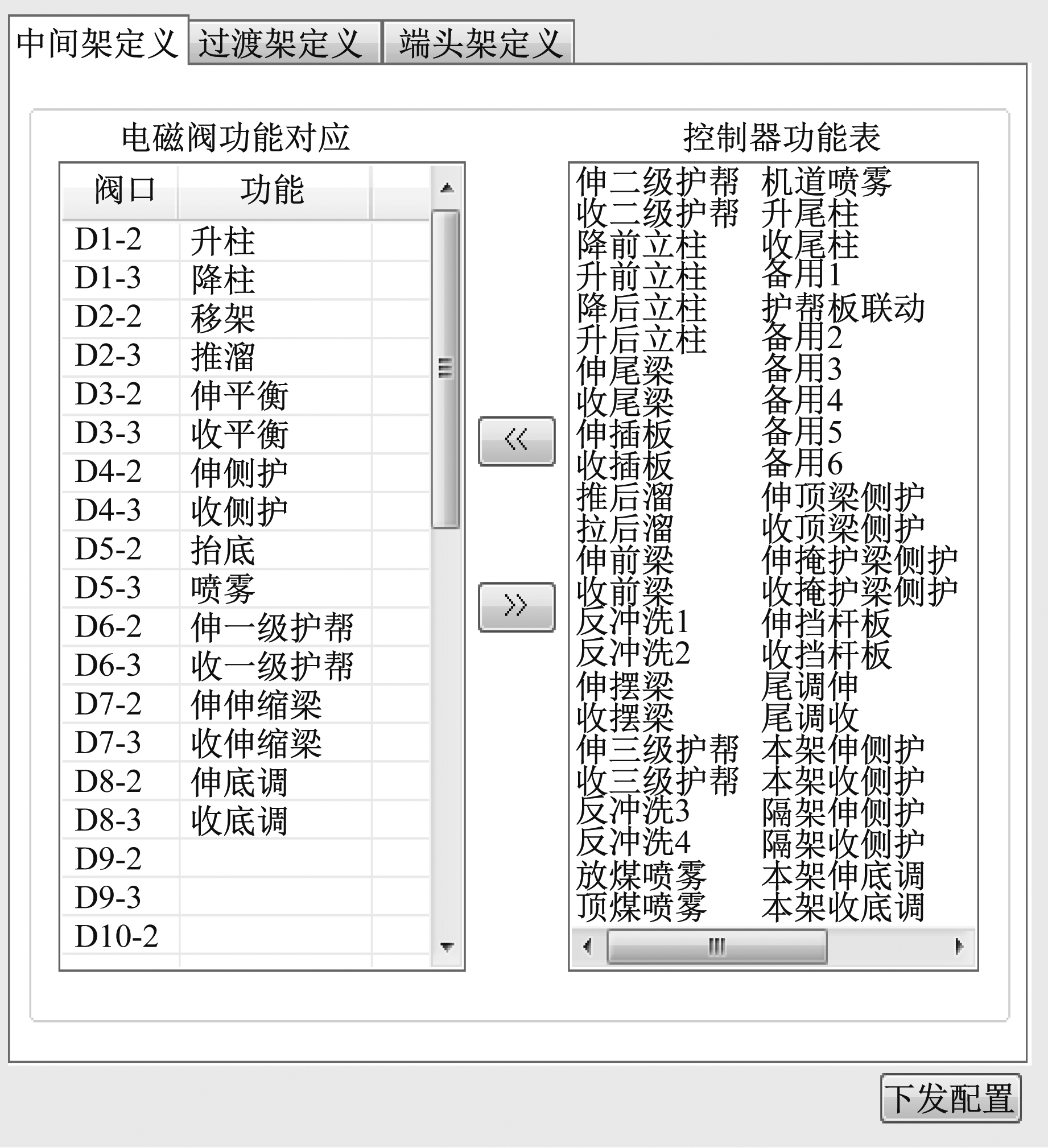
图7 控制器动作和电磁阀口定义
Fig.7 Controller action and magnetic valve port definition
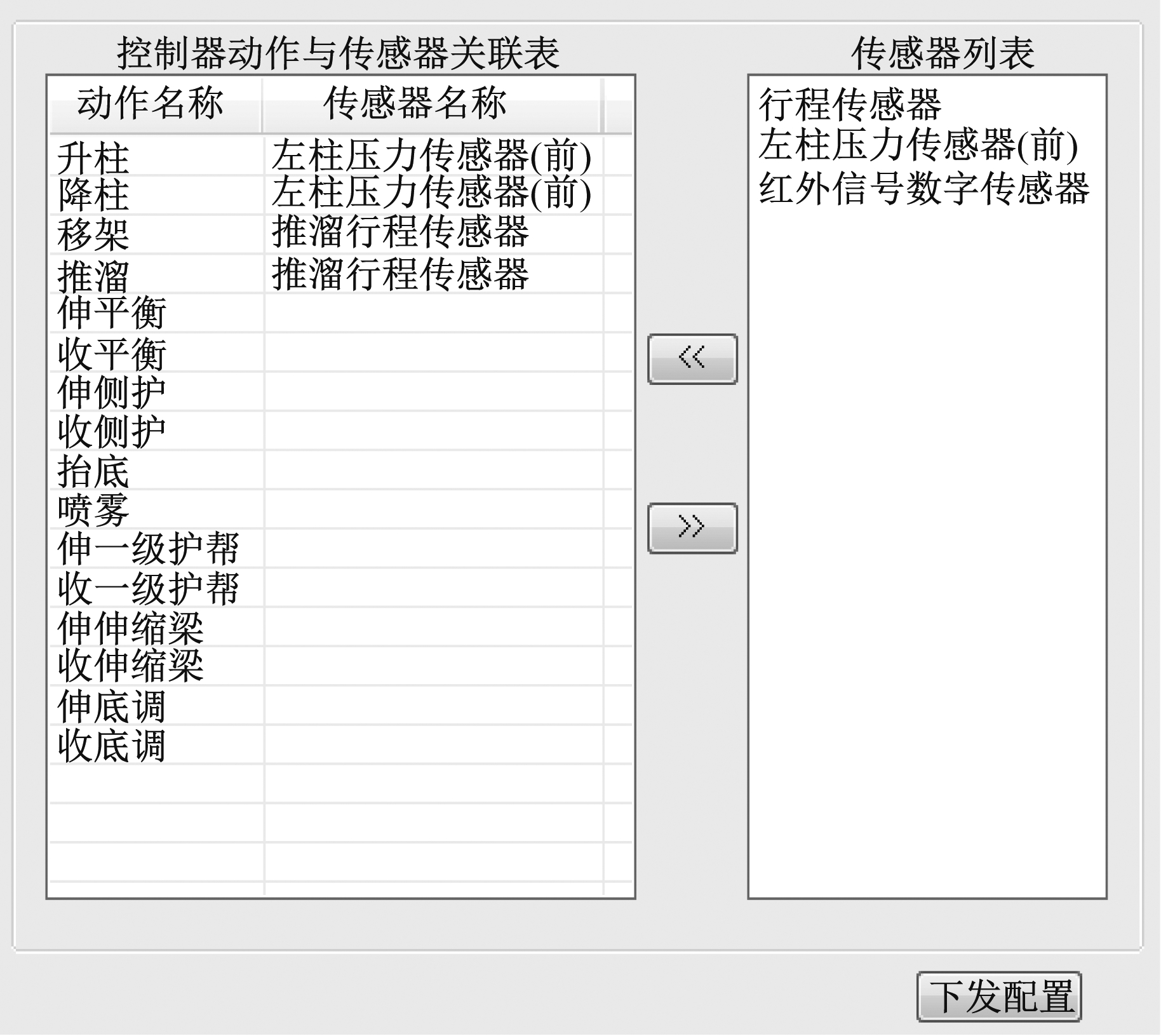
图8 控制器动作和传感器关联定义
Fig.8 Controller action and sensor association definition
(5) 传感器变化曲线设置:实际测试过程中,对具体的综采工作面的各类传感器变化趋势进行分析,根据分析结果生成相关传感器的变化曲线。检测装置在控制器动作过程中使用该曲线同步生成传感器变化的模拟信号,为控制器提供近似于实际综采工作面工况的数字环境。
4.2 环境工况适应性测试
以液压支架自动移架的主要动作顺序为例来测试其综采工作面环境工况适应性。液压支架自动移架的主要过程为降柱、移架、升柱3个动作顺序执行,相关联的传感器为监测立柱压力的压力传感器和监测支架移动步距的推移行程传感器[11]。液压支架降柱时,液压支架顶梁随着立柱的收缩脱离工作面顶板,立柱压力由较大的支承压力向较小的压力过渡变化;移架时,液压支架推移油缸推出的行程由大到小变化(传感器倒装);升柱时,立柱压力由小变大,使得支架顶梁和工作面顶板结合达到支承压力。
检测装置检测到定义为降柱的电磁阀输出时,启动立柱压力变化过程的模拟。此处的压力变化曲线根据工况特点,可以设计为模拟顶板稳定、工况较好情况下的压力值随时间由大到小变化的曲线,或模拟顶板破碎工况的压力值随时间变化不显著的曲线,以测试控制系统软件在2种不同工况下是否能够根据压力值变化趋势和数值大小判断是立即执行升立柱动作以支护顶板,结束移架过程,还是执行带压移架,进入移架阶段[12-13]。
与降柱阶段类似,支架移架过程中,行程传感器数值变化曲线可以根据综采工作面底板凹凸和起伏工况设计为模拟底板平整工况较好情况下的行程传感器数值随时间由大到小的变化曲线,或模拟底板凹凸工况下推移受阻,行程传感器数值变化不显著的曲线,以测试控制系统软件在2种不同工况下是否能够根据行程值变化趋势和数值大小判断是立即执行升立柱动作以支护顶板,结束移架过程,还是开启抬底动作,克服凹凸底板阻力,继续执行移架动作至目标行程值到达。
模拟大倾角综采工作面或仰俯采工况时需要通过模拟安装在液压支架顶梁、掩护梁和底座等构件上的倾角传感器数值变化过程的曲线,验证控制系统的控制策略对不断变化的工作面工况的适应能力。控制系统根据倾角传感器的数值变化趋势和数值感知液压支架的姿态,通过对平衡、调底、调斜和侧护板等液压支架构件的控制,实现液压支架姿态的调整和移架过程的顺利进行[4,14]。
4.3 控制系统基本功能测试
液压支架电液控制系统基本功能分为控制单个液压支架单个构件的单动功能、控制多个液压支架构件按顺序执行的成组功能及跟随采煤机位置的变化、电液控制系统按照具体的采煤工艺进行的自动跟机功能。液压支架电液控制系统基本功能测试流程如图9所示。
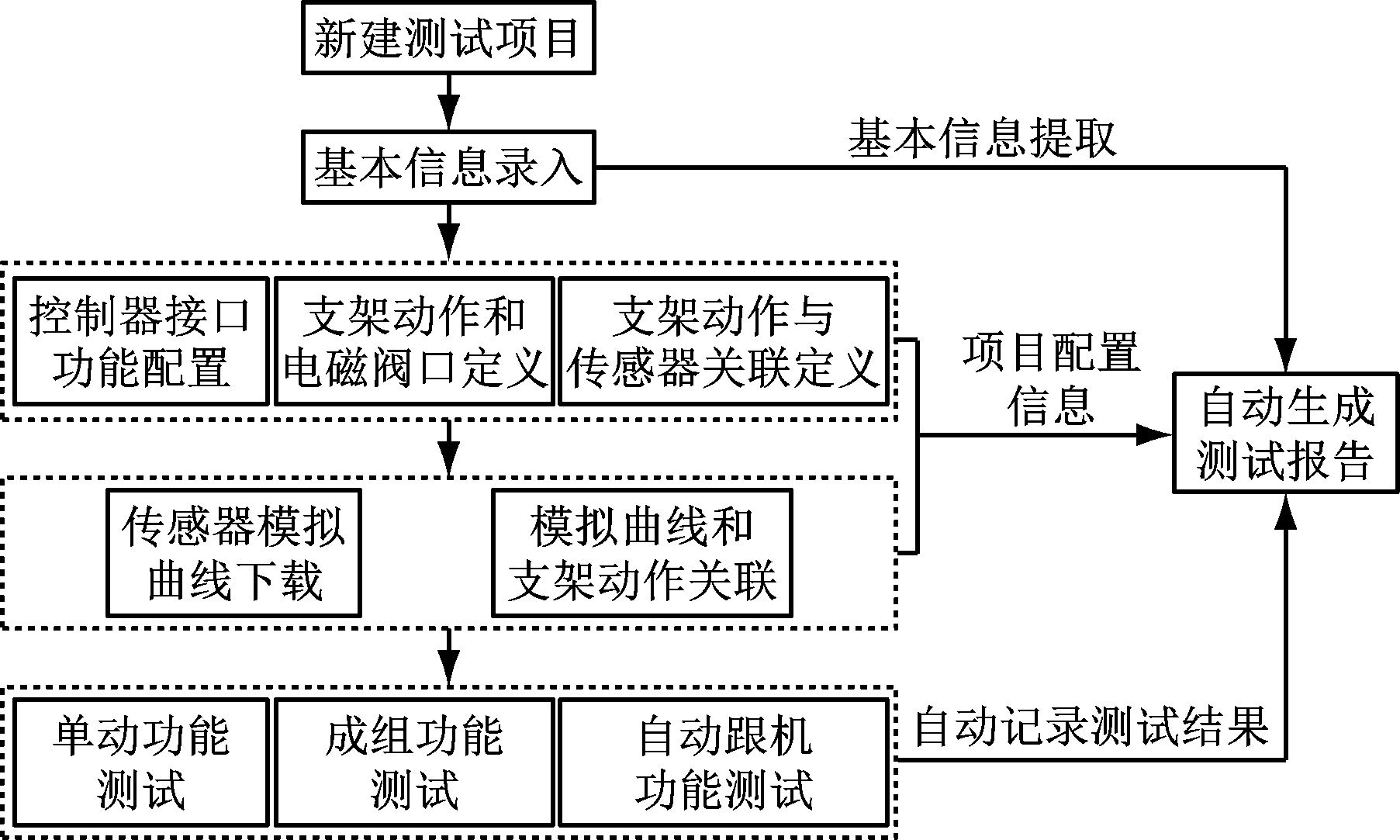
图9 液压支架电液控制系统基本功能测试流程
Fig.9 Test flow chart of basic function of electro-hydraulic control system of hydraulic support
4.3.1 单动功能测试
单动功能测试主要是验证控制系统所实现的液压支架立柱、推移千斤顶、护帮板、侧护板等构件控制是否齐全,对应功能的电磁阀输出口是否正确及电磁阀口输出功率是否满足电磁先导阀工作功率的要求,避免控制系统在现场调试过程中发生液压支架误动作,确保人员和设备的安全。
单动功能测试采用循环方式对所有的动作进行测试,测试开始时管理软件根据控制器动作和电磁阀口定义自动列出项目配置的所有单动动作。管理软件依据动作列表,通过网络给控制系统发送单动动作指令,同时判断检测装置上报的电磁阀口输出端口号与定义是否一致、驱动电流值是否符合标准(大于110 mA),依次对所有单动动作进行测试,如图10所示。

图10 单动功能测试
Fig.10 Single function test
4.3.2 成组功能测试
成组功能测试主要验证控制系统对多个液压支架或单个液压支架不同构件的组合动作控制逻辑是否符合设计的控制流程及各个动作的持续时间是否与设置值一致。一般的成组功能包括成组推溜、成组护帮板、成组伸缩梁、成组伸缩梁和护帮板联动、成组喷雾动作等[13]。
以控制液压支架二级护帮板联动动作为例,测试成组护帮板收动作。测试开始时由管理软件通过网络给控制系统发出模拟手动操作的成组护帮板收动作指令和动作支架的范围。控制系统在接收到指令后启动规定范围内的控制器先执行二级护帮板收动作并持续一段时间(或二级护帮板限位传感器数值改变),再执行一级护帮板收动作并持续一段时间(或一级护帮板限位传感器数值改变)。管理软件根据检测装置检测到的电磁阀口输出顺序、持续时间及传感器数值判断控制系统的控制逻辑是否符合要求。护帮板伸动作测试时,增加一级和二级护帮板压力传感器数值变化过程的模拟,以测试当护帮压力达到支护煤壁压力值后,护帮板的伸动作能否及时停止。
4.3.3 自动跟机功能测试
自动跟机功能测试是在成组功能测试的基础上增加采煤机位置的模拟,管理软件通过网络给控制系统发送采煤机位置和行走方向指令,以模拟采煤机的运行。控制系统在检测到采煤机位置发生变化后,按照采煤工艺要求触发相应范围内液压支架进行规定的控制动作[15-16]。
自动跟机功能涉及到多个支架不同构件的协同动作,动作有一定的持续时间。一般控制系统以时间参数和传感器数值变化为依据控制液压支架各构件动作顺序和持续时长。实际测试过程中需要根据具体的控制逻辑和采煤工艺,设计传感器正常、传感器故障、传感器断开、采煤机中部割煤、采煤机机头割煤、采煤机机尾割煤等多组测试用例,覆盖控制系统的控制逻辑和采煤工艺各阶段。
5 结论
(1) 液压支架电液控制系统自动化测试平台实现了液压支架电液控制系统的单动功能测试、成组功能测试、自动跟机功能测试及综采工作面工况适应性测试的自动化,相比使用实物或设备模型进行传感器模拟的方法,不仅实现成本低,而且提高了测试效率和测试精度,对于不同工况下传感器数据变化过程的模拟更加便捷。该平台为提高测试效率和研究液压支架电液控制系统的自适应性提供了有效手段。
(2) 从该测试平台的设计原理和测试流程可看出,该测试平台适用于包括SAC型液压支架电液控制系统在内的各种液压支架电液控制系统及根据模拟或数字型传感器信号、驱动电磁阀进行设备控制的其他工业控制系统的测试。
参考文献(References):
[1] 金静飞.液压支架电液控制系统测试平台关键技术研究[D].徐州:中国矿业大学,2015.
[2] 杨汉宏,孟峰.液压支架控制器自动化检测装置研究[J].工矿自动化,2017,43(1):13-17.
YANG Hanhong,MENG Feng.Research on automatic detection device of hydraulic support controller[J].Industry and Mine Automation,2017,43(1):13-17 .
[3] 王金华.我国煤矿开采机械装备及自动化技术新进展[J].煤炭科学技术,2013,41(1):1-4.
WANG Jinhua. New progress on China coal mining machinery equipment and automation technology[J]. Coal Science and Technology, 2013,41(1):1-4.
[4] 朱金雨,李国莲.液压支架跟机自动化系统设计[J].工矿自动化,2013,39(12):1-4.
ZHU Jinyu, LI Guolian.Design of machinery-tracked automatic system of hydraulic support[J].Industry and Mine Automation,2013,39(12):1-4.
[5] 李首滨,黄曾华,王旭鸣,等.综采工作面装备远程控制技术进展报告[J]. 科技资讯,2016,14(12):173-174.
LI Shoubin,HUANG Zenghua,WANG Xuming, et al. Equipment remote control technology of longwall mine face[J]. Science & Technology Information, 2016,14(12):173-174.
[6] 罗跃勇,牛剑峰,韦文术.SAC型液压支架电液控制系统的研制与应用[J].煤炭科学技术,2008,36(12):102-104.
LUO Yueyong,NIU Jianfeng,WEI Wenshu. Development and application of SAC electric and hydraulic control system for hydraulic powered support[J]. Coal Science and Technology,2008,36(12):102-104.
[7] 田成金,魏文艳,朱小林.基于SAC型液压支架电液控制系统的跟机自动化技术研究[J]. 煤矿开采,2012,17(2):46-50.
TIAN Chengjin,WEI Wenyan,ZHU Xiaolin. Automatic following coal-cutter technology of based on SAC electrodraulic control system in powered support[J]. Coal Mining Technology, 2012,17(2):46-50.
[8] 牛剑峰,李俊士,吴桐,等.一种液压支架电液控制系统的仿真测试系统:201510616938.0[P].2015-09-24.
[9] 杨霞,任伟,洪鹃.煤矿液压支架控制器测试平台的研究设计[J]. 工矿自动化,2007,33(1):84-86.
YANG Xia, REN Wei, HONG Juan. Design of testing table of hydraulic support controller for coal mine[J].Industry and Mine Automation,2007,33(1):84-86.
[10] 周立功. ARM嵌入式系统基础教程[M].2版. 北京:北京航空航天大学出版社,2008.
[11] 黄乐亭,黄曾华,张科学.大采高综采智能化工作面开采关键技术研究[J].煤矿开采,2016, 21(1):1-6.
HUANG Leting, HUANG Zenghua, ZHANG Kexue. Key technology of mining in intelligent fully mechanized coal mining face with large mining height[J].Coal Mining Technology,2016,21(1):1-6.
[12] 牛剑峰.综采液压支架跟机自动化智能化控制系统研究[J]. 煤炭科学技术,2015,43(12):85-91.
NIU Jianfeng. Study on automatic and intelligent following control system of hydraulic powered support in fully-mechanized coal mining face[J]. Coal Science and Technology, 2015,43(12):85-91.
[13] 张文杰,高云广,刘宗伟,等.液压支架电液控制系统的研究与应用[J].机电技术,2016(3):12-13.
[14] 牛剑峰.综采工作面自动调斜与防滑控制系统研究[J]. 煤矿开采,2015,20(2):32-34.
NIU Jianfeng. Automatic incline adjustment and anti-skid control system development for full-mechanized mining face[J].Coal Mining Technology,2015,20(2):32-34.
[15] 孔国财.SAC液压支架电液控制系统在石沟驿矿的应用[J]. 煤矿开采,2010,15(3):88-89.
KONG Guocai. Application of electro-hydraulic control system of SAC powered support in Shigouyi colliery[J]. Coal Mining Technology, 2010,15(3):88-89.
[16] 陶显,林福严,张晓青,等.液压支架电液控制系统跟机自动化技术研究[J]. 煤炭科学技术,2012,40(12):84-87.
TAO Xian, LIN Fuyan, ZHANG Xiaoqing,et al. Study on automatic following technology of electric and hydraulic control system applied in hydraulic powered support[J]. Coal Science and Technology,2012,40(12):84-87.