0 引言
在采煤工艺中,要求液压支架紧随采煤机移动,以保证工作面顶板支护并正常推进。液压支架动作主要包括伸护帮板、收护帮板、升柱、降柱、移架、推溜等,要求各个动作快速完成。支架动作的动力源是工作面供液系统的高压乳化液,支架动作速度与液压系统压力和供液流量密切相关。
诸多国内外学者研究了液压系统压力和供液流量对支架动作速度的影响。张海平[1]对液压速度控制技术进行了深入研究,指出液压系统中负载决定压力、流量决定速度。Li Haining等[2]提出增大供液流量可加快支架动作速度,并利用AMESim进行了仿真验证。于玲等[3]提出增大供液流量对支架升柱动作效果明显,但达到一定程度后影响较小。韩伟等[4]、刘宝龙[5]提出供液流量对支架动作速度的影响与负载有关。李晓豁等[6-7]和Zhang Xin等[8]指出液压系统压力增大对支架升柱、移架动作速度无影响,但可提高降柱动作速度;供液流量增加可提高支架升柱、移架动作速度,但对降柱动作速度无影响。曹小荣等[9]通过理论计算得出额定供液流量下支架升柱、降柱、移架、推溜4个动作的负载特性曲线,并得出如下结论:升柱时液压系统压力小,可通过增加供液流量来提高升柱动作速度;降柱时液压系统压力大,泵处于频繁卸载状态,增加供液流量无法提高降柱动作速度。上述研究均表明,支架不同动作的速度与液压系统压力和供液流量之间存在复杂的耦合关系,但并未提出采用何种供液策略来实现支架在各个动作速度下能够很好地跟随采煤机。本文通过理论分析和建模仿真量化支架动作速度与液压系统压力和供液流量间的相互作用,进而提出了一种适应液压支架动作的稳压供液技术并进行验证,为下一步革新现有支架供液控制模式进行了有益的尝试和探索。
1 支架供液过程理论分析
综采工作面回采工艺过程要求工作面液压支架跟机速度满足工作面推进速度要求,而支架跟机速度由支架动作速度决定,尤其是升柱、降柱、移架、推溜4个主要动作速度。液压支架动作其实就是液压缸动作[10-12],支架动作速度由液压缸活塞动作速度决定,因此可将液压支架动作简化成双作用单活塞液压缸动作,如图1所示。a为活塞加速度;v为活塞速度;t为活塞运动时间;m为负载质量;F为负载力,包括摩擦力、重力等;AA为进液腔作用面积;AB为出液腔作用面积;QA为进液流量;QB为出液流量;pA为进液压力,即液压系统压力;pB为出液压力,即背压。
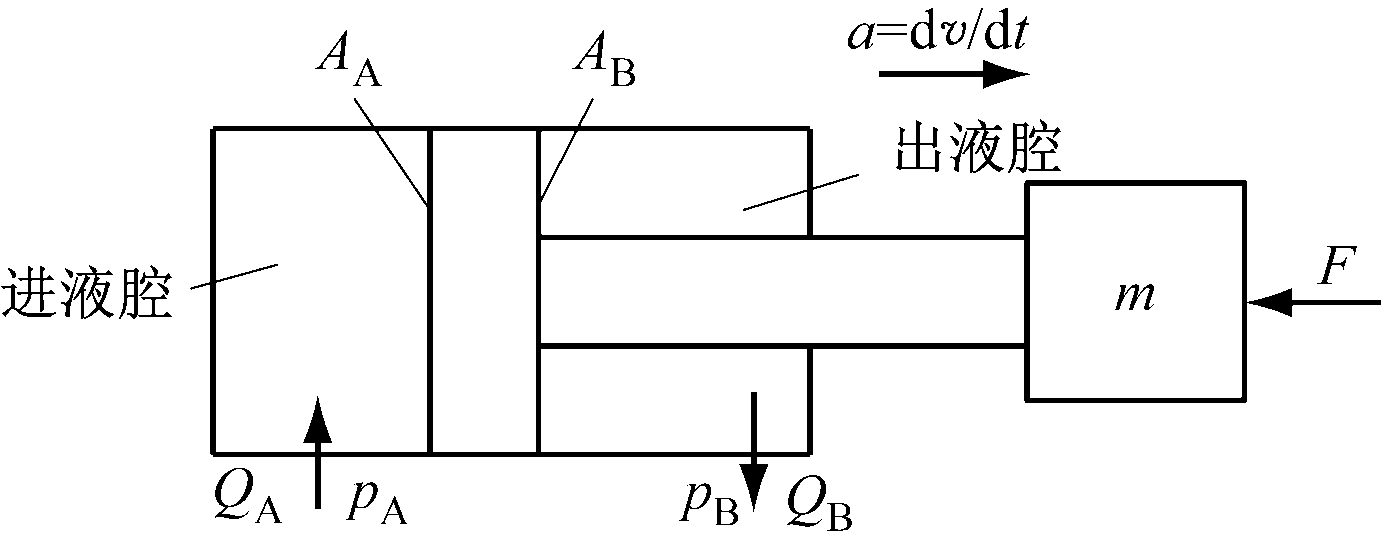
图1 双作用单活塞液压缸示意
Fig.1 Schematic diagram of double acting and single piston hydraulic cylinder
1.1 液压系统压力与支架动作速度的关系
稳态时,活塞加速度a=0,活塞速度v=c(c为常数),则液压缸活塞受力关系为
pAAA=F+pBAB
(1)
非稳态时,活塞加速度a≠0,活塞速度v≠c,则液压缸活塞受力关系为
pAAA=F+pBAB+ma
(2)
假设摩擦力pm、出液压力pB与活塞速度v正相关[1],得
F/AA=pm+pc=fm(v)+pc
(3)
pB=fB(v)
(4)
式中:pc为除摩擦力以外的负载力;fm(v),fB(v)分别为摩擦力pm、出液压力pB关于活塞速度v的函数。
将式(3)和式(4)分别代入式(1)和式(2),可得
稳态时:
pA=pc+fm(v)+fB(v)AB/AA
(5)
非稳态时:
pA=pc+fm(v)+fB(v)AB/AA+mv′/AA
(6)
活塞速度变化直至重新受力平衡,液压系统由非稳态向稳态变化。值得注意的是,当pA≤pc时,活塞无法克服负载力,活塞速度v=0。
对于工作面液压系统,可控因素为液压系统压力,当液压系统压力不变时,支架动作速度(即液压缸活塞速度)总会达到稳态。因此,液压系统压力与支架动作速度存在对应关系,即某个液压系统压力下存在与之对应的稳态速度,且二者正相关。
1.2 供液流量与支架动作速度的关系
流量直接决定了活塞速度[1]:
v=QA/AA=QB/AB
(7)
由式(7)可知,活塞速度与进出液流量呈正比。在不考虑液体压缩的条件下,式(7)恒成立。设AA=γAB(γ为进出液腔作用面积之比),则
QA=γ QB
(8)
对于工作面液压系统,可控因素为供液流量(即液压缸进液流量),理想情况下,供液流量越大,支架动作速度越快。
1.3 液压系统压力和供液流量与支架动作速度的关系
稳态时,液压系统压力、供液流量和支架动作速度之间存在一一对应关系,均保持不变;当流量变化时,会打破稳态工况,导致液压系统压力变化,进而导致支架动作速度变化,直到重新满足式(5)和式(7)。
在工作面液压支架动作过程中,供液系统可通过增加(或减少)供液流量,使液压系统压力随之升高(或降低),进而提高(或降低)支架动作速度。但供液系统内置卸载阀和安全阀,当液压系统压力超过高限时,液压系统内会卸载溢流一部分供液流量。此外,最大供液流量受供液系统设备额定能力限制,并非可以无限大[13-14]。因此,工作面液压支架动作速度受供液流量和液压系统压力限值(即卸载压力和加载压力设定值)共同影响。
2 支架供液仿真研究
2.1 工作面液压系统AMESim建模
为定量研究支架动作速度与液压系统压力和供液流量的关系,并进一步探索合理的供液方案,利用AMESim软件建立工作面液压系统仿真模型,如图2所示。该仿真模型可通过控制器分别控制电磁卸载阀、乳化液泵和电控换向阀来对系统压力、供液流量进行定量调节和支架动作进行控制操作。
依照实物设置仿真模型中各元件的尺寸、结构、材质等机械参数,具体见表1。
系统漏液量、管路损耗、负载属性等仿真模型不确切参数通过仿真结果与试验结果比对进行调整和确定。液压支架的主要动作(降柱—移架—升柱—推溜)分别在试验和仿真中操作完成,其中压力数据取样间隔均为0.5 s,乳化液泵额定供液流量为400 L/min,卸载压力和加载压力分别为31,28 MPa,升柱、降柱行程为300 mm,推溜、移架行程为800 mm。试验和仿真得到的液压系统压力曲线如图3所示。
由图3可知,仿真与试验结果的变化趋势和波动范围基本一致,验证了仿真模型的有效性;在额定供液流量条件下,降柱、移架、推溜过程中液压系统压力在卸载压力和加载压力之间频繁波动,说明乳化液泵的部分供液流量注入液压缸上腔,供液流量过足;升柱过程中液压系统压力降低至18 MPa左右,低于加载压力28 MPa,说明乳化液泵的全部供液流量注入液压缸下腔,但供液流量仍然不足。因此,本文以降柱和升柱2个典型支架动作过程为仿真研究对象。
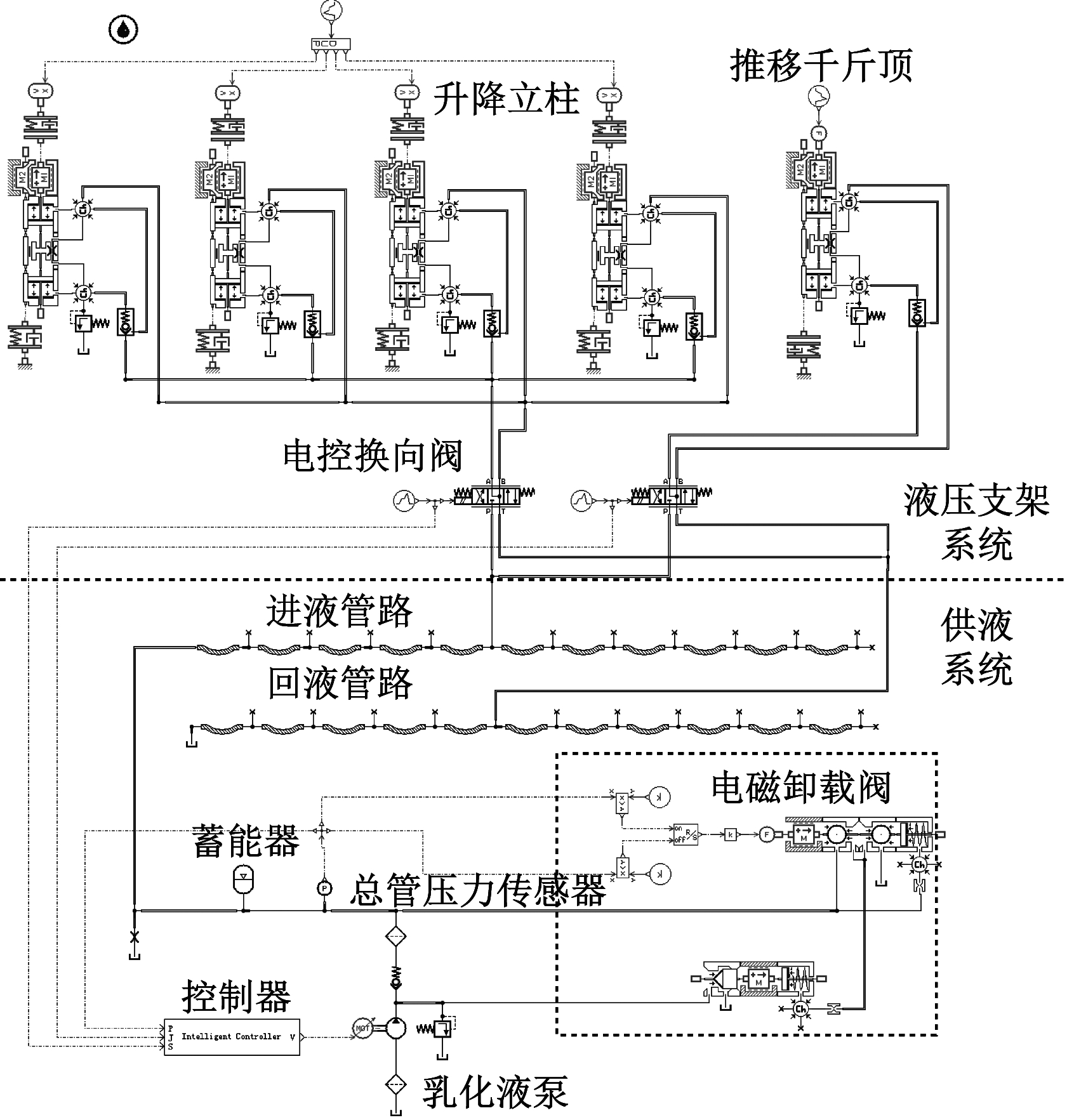
图2 工作面液压系统仿真模型
Fig.2 Simulation model of working face hydraulic system
表1 仿真模型部分元件参数
Table 1 Parameters of partial elements in simulation model
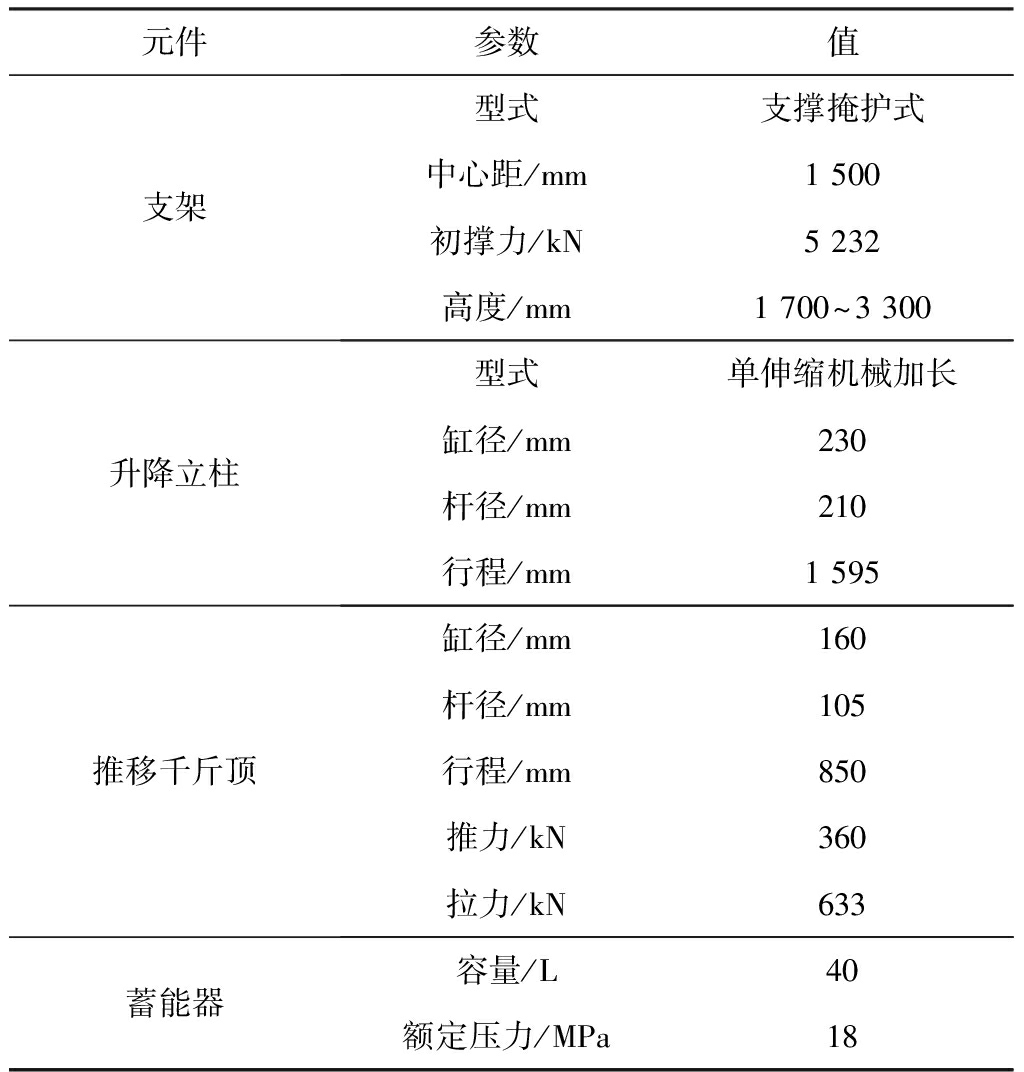
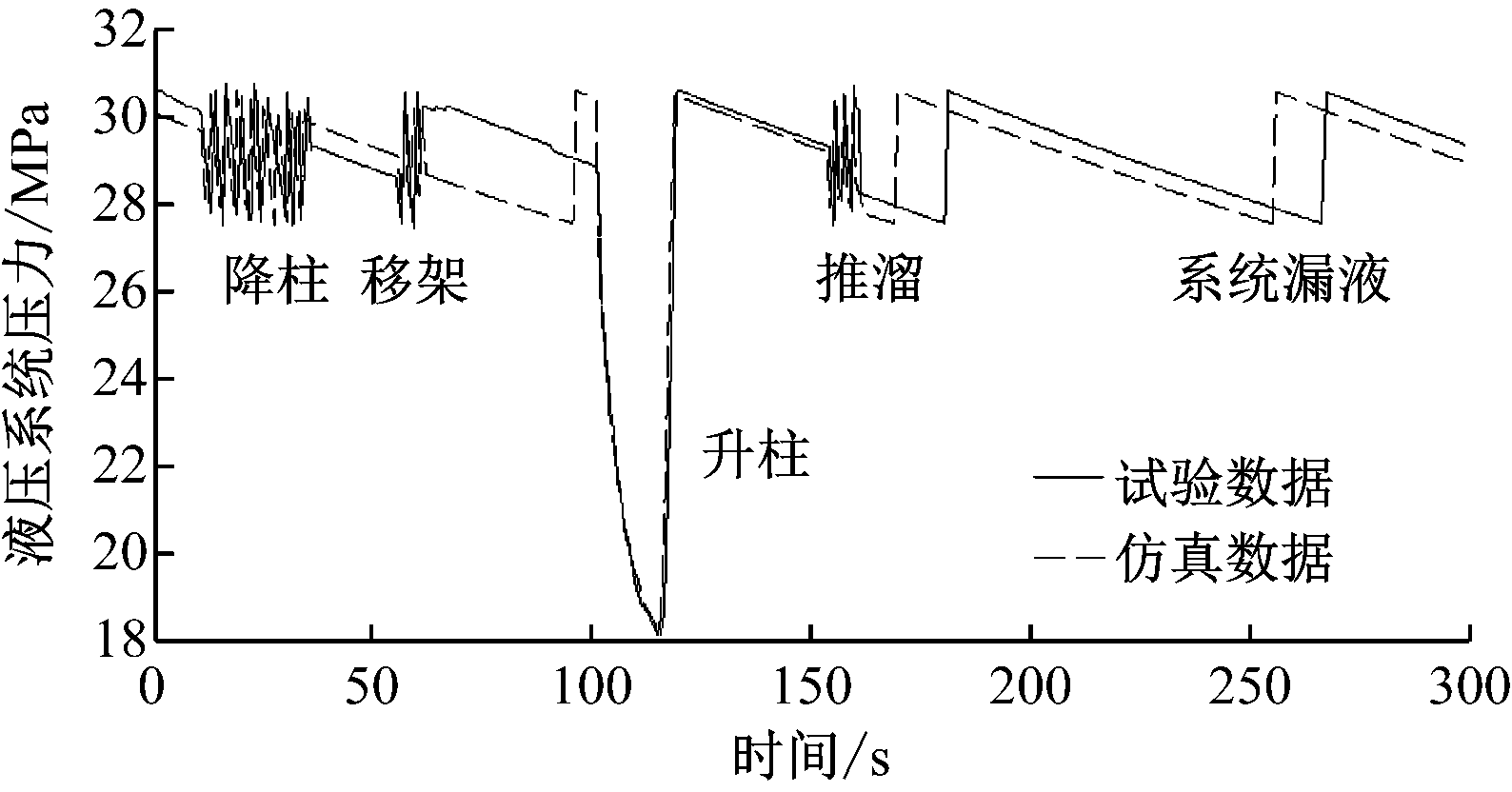
图3 液压系统压力试验和仿真结果对比
Fig.3 Comparison of experimental and simulated hydraulic system pressure
2.2 仿真结果与分析
2.2.1 支架降柱过程
降柱过程设置3组卸载压力和加载压力,分别为31和28,28和25,25和22 MPa,3组供液流量分别为50,80,130 L/min。降柱过程:操作立柱的电控换向阀,使立柱液压缸上腔进液、下腔出液,立柱杆从接触顶板的位置开始逐渐脱离顶板,持续10 s。降柱过程仿真结果如图4所示。
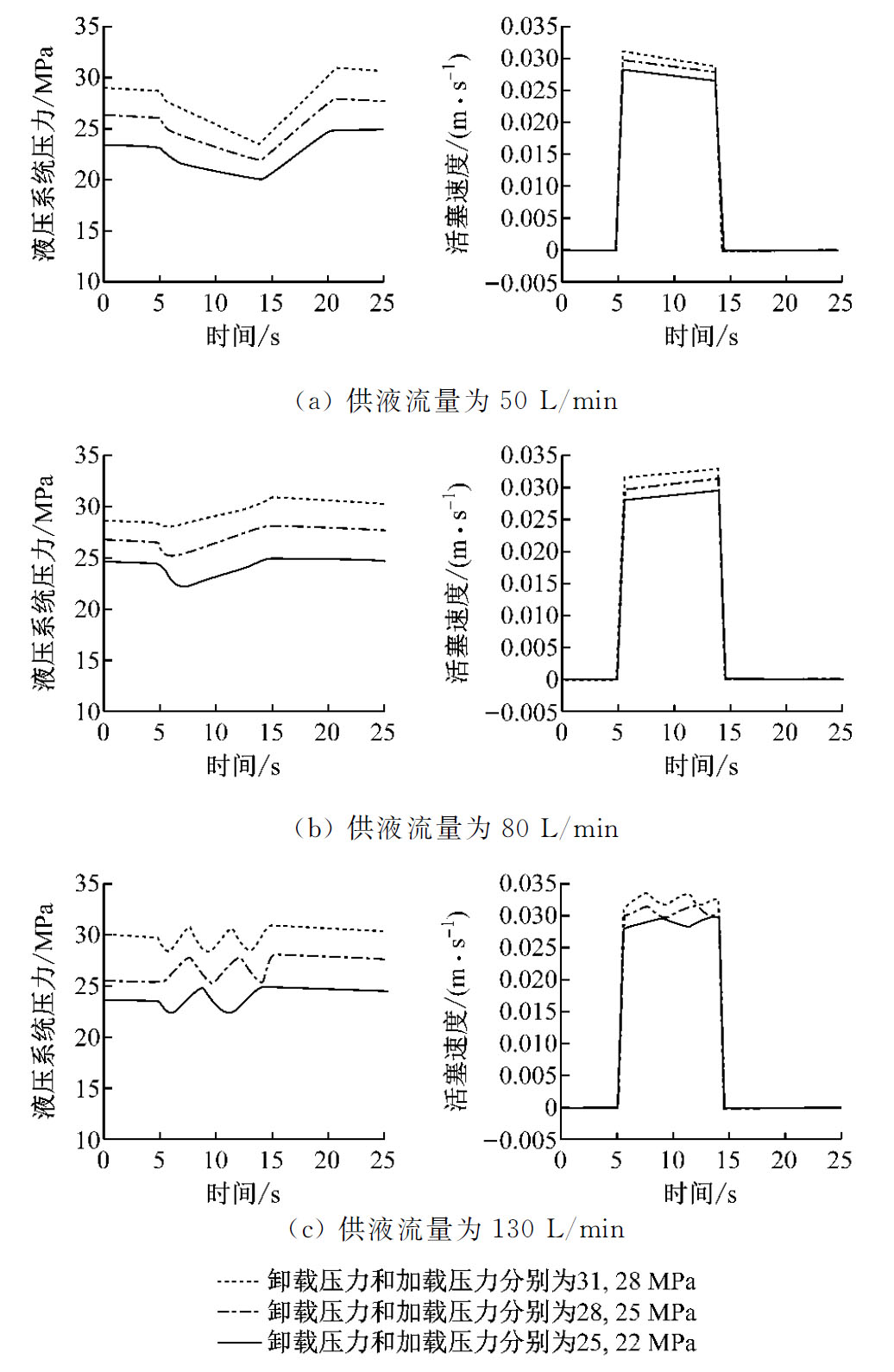
图4 降柱过程仿真结果
Fig.4 Simulation results of prop-dropping process
图4(a)中,50 L/min的供液流量小于初始速度所需流量,液压系统压力和活塞速度持续下降。图4(b)中,80 L/min的供液流量略大于初始速度所需流量,液压系统压力和活塞速度持续上升,但在降柱动作完成前液压系统压力未高于卸载压力。图4(c)中,130 L/min的供液流量远大于初始速度所需流量,导致液压系统压力快速上升,在降柱动作未完成前迅速高于卸载压力,因此卸载阀打开,导致压力液被卸载,此时液压缸由于没有压力液供给,液压系统压力迅速下降,当低于加载压力时,卸载阀关闭,压力液再次进入液压缸,使液压系统压力上升,周而复始,压力在限值之间频繁波动,且活塞速度随液压系统压力变化而频繁波动,直至降柱动作完成。由图4可知,液压系统压力的变化趋势与活塞速度(即支架动作速度)一致,且液压系统压力越高,初始速度越快,即液压系统压力与支架动作速度呈正相关关系;对于降柱过程,80 L/min的供液方案最合理,不仅具有最大的支架动作速度,而且避免了支架动作过程中压力波动。
2.2.2 支架升柱过程
升柱过程设置3组卸载压力和加载压力,分别为31和28,28和25,25和22 MPa,3组供液流量分别为300,600,800 L/min。升柱过程:操作立柱的电控换向阀,使立柱液压缸下腔进液、上腔出液,立柱杆从离顶板200 mm的位置开始上升,直至接触顶板。升柱过程仿真结果如图5所示。
图5(a)中,300 L/min的供液流量小于初始速度所需流量,液压系统压力和活塞速度出现迅速下降的情况,当液压系统压力低于蓄能器的额定压力18 MPa时,蓄能器压力液完全释放,导致压力和速度下降更快。图5(b)中,600 L/min的供液流量略大于初始速度所需流量,液压系统压力和活塞速度持续上升。图5(c)中,800 L/min的供液流量远大于初始速度所需流量,造成液压系统压力在限值之间频繁波动,且活塞速度随液压系统压力变化而频繁波动,直至升柱动作完成。由图5可知,液压系统压力的变化趋势与活塞速度一致,且液压系统压力越高,初始速度越快,即液压系统压力与支架动作速度呈正相关关系;对于升柱过程,600 L/min的供液方案最合理。
2.3 适应支架动作的稳压供液技术
通过仿真结果分析可得以下结论:
(1) 液压系统压力、供液流量和支架动作速度之间的关系:在供液流量不足的条件下,支架动作速度由供液流量决定而不受液压系统压力限值影响;在供液流量充足的条件下,提高液压系统压力限值可加快支架动作速度;在供液流量过足的条件下,受液压系统压力限值的影响,支架动作速度非但不能提高,反而造成波动。
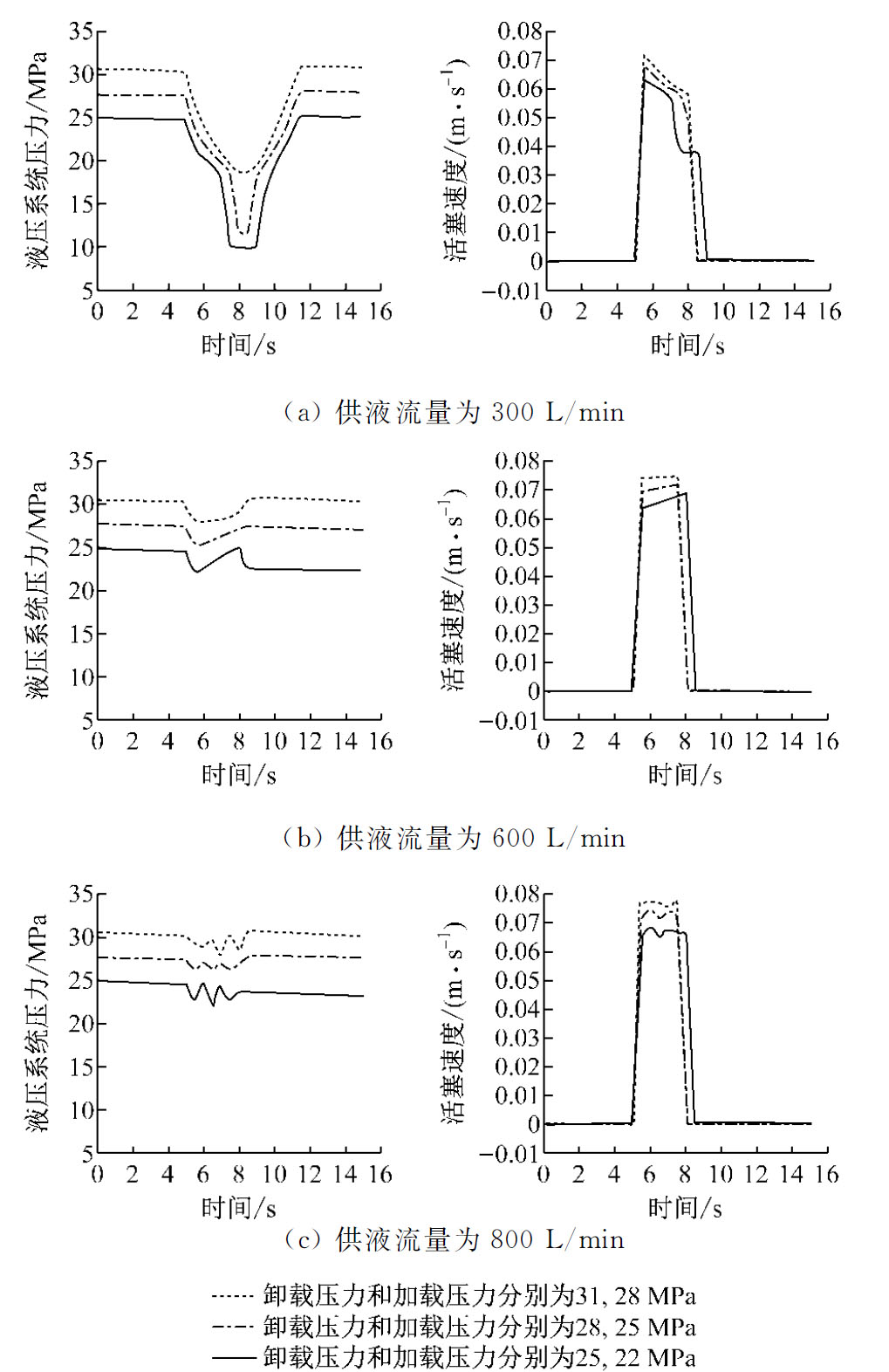
图5 升柱过程仿真结果
Fig.5 Simulation results of prop-lifting process
(2) 相同液压系统压力限值下,升柱过程所需的充足供液流量及相应支架动作速度均比降柱过程大很多,原因是立柱液压缸的上下腔背压不同。因此,对于不同的支架动作,为提高支架动作速度和稳定支架动作过程液压系统压力,需要提供相应的合理供液流量。
(3) 液压系统压力限值越高,支架动作初速度越大;乳化液泵加载后,合理的供液流量可使支架动作初速度保持并略微提高。因此,为提高支架动作速度,应依据液压系统压力限值、支架动作类型等因素合理调整供液流量,同时依据初撑力要求、压力安全、支架动作初速度等因素合理调节液压系统压力限值。
基于此,本文提出了一种适应液压支架动作的稳压供液技术,即以支架动作类型和液压系统压力限值等条件为判断依据,通过调整供液流量,使支架动作时液压系统压力缓慢平稳变化、略微上升,以提高支架动作速度。
4 稳压供液试验
为适应液压支架不同动作的合理供液要求,供液系统应具备大范围、高精度的流量调节功能及卸载和加载压力电控功能。因此组建一套满足大流量连续可调的多泵+多变频供液系统,如图6所示,并配套若干ZFS6000型液压支架。其中,1台400 kW变频器采用“一拖四”的方式驱动4台400 L/min乳化液泵,变频与工频可同步切换[15];1台110 kW变频器驱动1台80 L/min乳化液泵,以提供精度更高的供液流量;每台乳化液泵上安装电磁卸载阀,可一定范围内控制卸载压力和加载压力。多泵+多变频供液系统可提供流量范围为0~1 680 L/min、精度为1.6 L/min(变频精度为1 Hz)的供液流量。
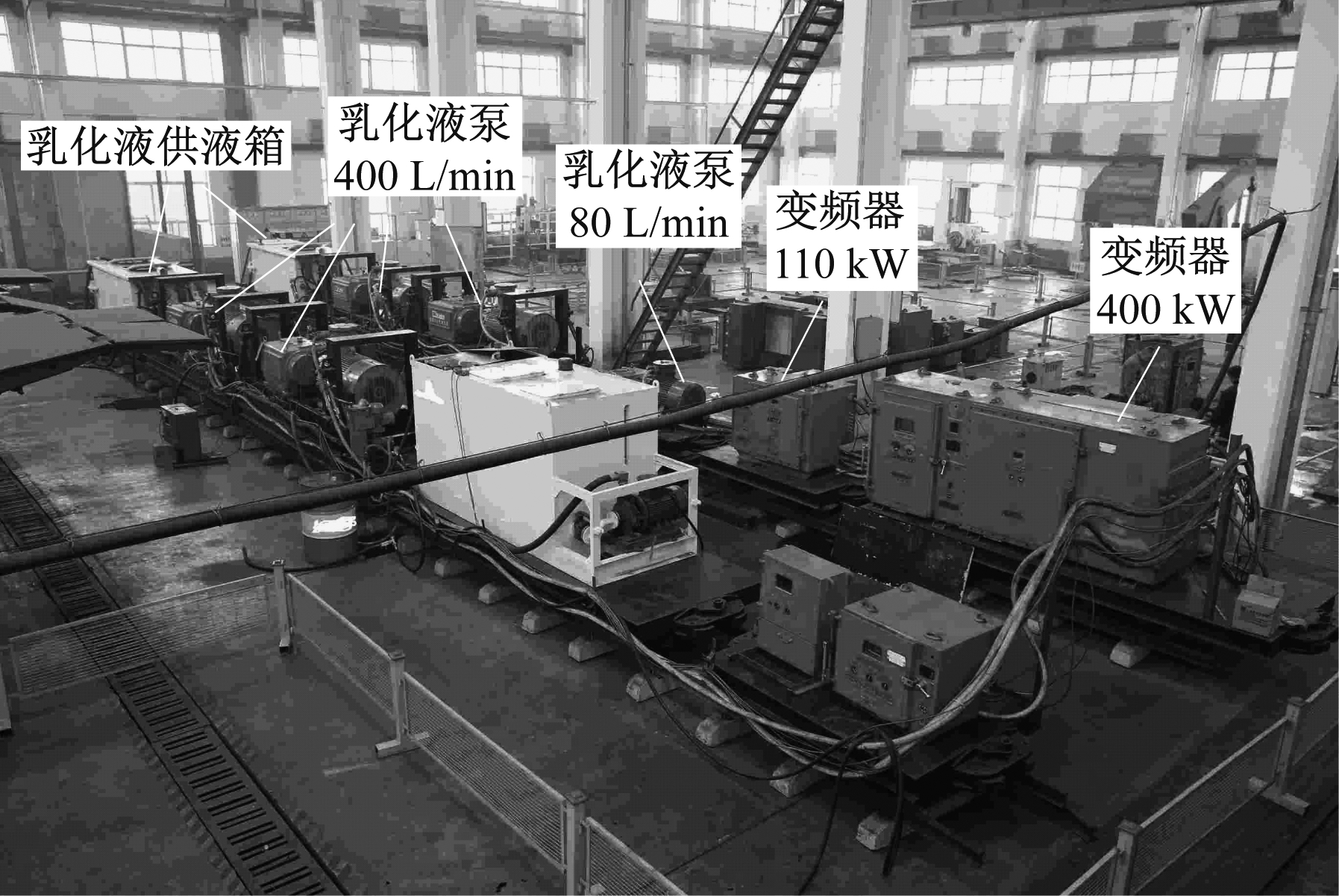
图6 多泵+多变频供液系统
Fig.6 Multi-pump and multi-frequency hydraulic fluid supply system
为验证适应液压支架动作的稳压供液技术,以支架4个基本动作(降柱—移架—升柱—推溜)为研究对象进行稳压供液试验。其中,卸载压力和加载压力分别为31,28 MPa。根据仿真模拟得到的支架基本动作的稳压供液流量,得到多泵+多变频供液系统的稳压供液方案,见表2。
根据稳压供液方案进行试验操作,得到稳压供液时液压系统压力曲线,并与2.1节中额定供液时液压系统压力试验数据对比,如图7所示。
由图7可知,与额定供液相比,稳压供液提高了支架升柱动作速度,避免了降柱、移架和推溜动作时液压系统压力的频繁波动。
5 结语
通过对液压支架供液过程的理论分析和建模仿真,得出了液压系统压力和供液流量对支架动作速度的作用规律,提出了适应液压支架动作的稳压供液技术,并利用大流量连续可调的多泵+多变频供液系统进行了试验验证。结果表明,相比于传统的额定供液,该技术不仅提高了支架动作速度,而且有效避免了支架动作过程中液压系统压力的频繁波动,达到了良好的支架跟随特性和较高的设备机械寿命。下一步将结合工作面液压支架跟机工艺特点,建立适应支架动作的稳压供液预测模型,为适应支架跟机联动的智能供液提供技术基础。
表2 稳压供液方案
Table 2 Stabilized pressure hydraulic fluid supply scheme
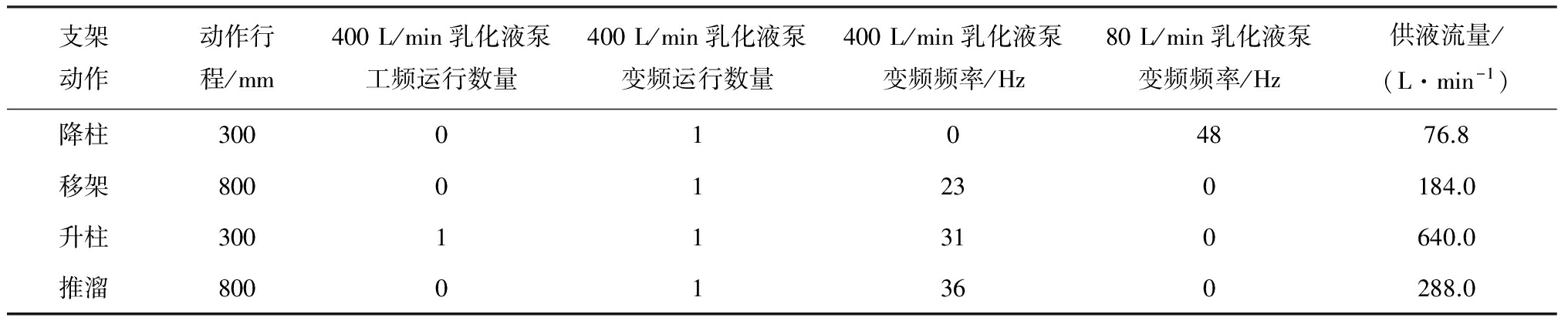
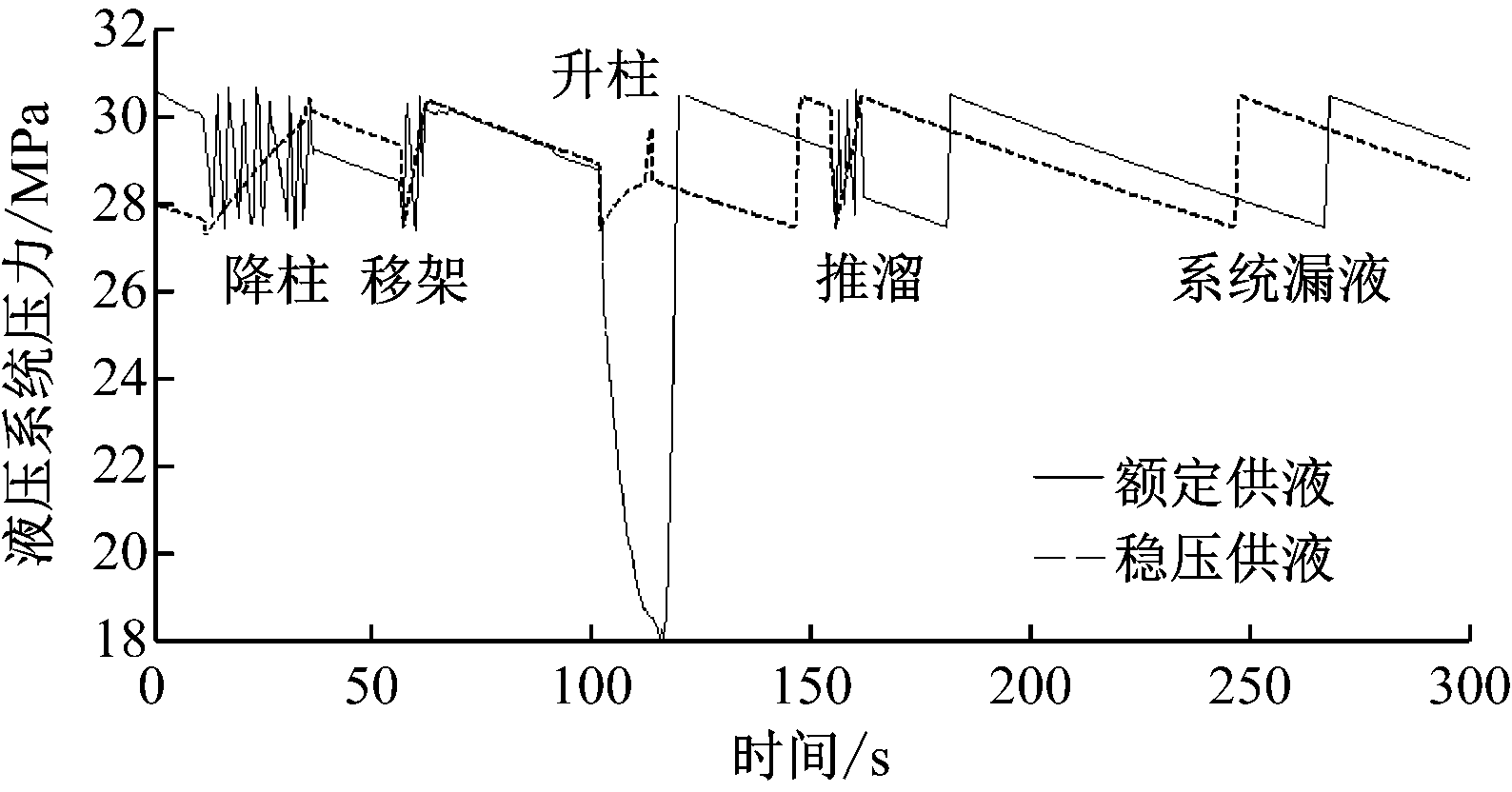
图7 稳压供液与额定供液时液压系统压力曲线对比
Fig.7 Comparison of hydraulic system pressure under stabilized pressure hydraulic fluid supply and constant hydraulic fluid supply
参考文献(References):
[1] 张海平.液压速度控制技术[M].北京:机械工业出版社,2014:24-62.
[2] LI Haining,DENG Daian.Research on influence factors of hydraulic support moving velocity in coal mining based on AMESim[J].Advanced Materials Research,2014,1014:180-184.
[3] 于玲,贾春强.综采工作面支架液压系统仿真研究[J].煤矿机械,2014,35(2):56-58.
YU Ling,JIA Chunqiang.Simulation research on hydraulic system of powered support in fully mechanized face[J].Coal Mine Machinery,2014,35(2):56-58.
[4] 韩伟,王国法,李政,等.液压支架移架速度的定量化研究[J].煤炭学报,2003,28(2):219-224.
HAN Wei,WANG Guofa,LI Zheng,et al.Quantitative study on advancing velocity of hydraulic powered support[J].Journal of China Coal Society,2003,28(2):219-224.
[5] 刘宝龙.液压支架推移装置参数优化与移架速度研究[D].太原:太原理工大学,2010.
[6] 李晓豁,段鹏文,周桂英.影响液压支架移架速度的因素分析[J].阜新矿业学院学报(自然科学版),1994,13(4):69-72.
LI Xiaohuo,DUAN Pengwen,ZHOU Guiying.Analysis of factors influencing advancing speed of a powered support[J].Journal of Fuxin Mining Institute(Natural Science),1994,13(4):69-72.
[7] 李晓豁,段鹏文,曹淑芬.提高液压支架移架速度方法的研究[J].阜新矿业学院学报(自然科学版),1996,15(3):313-317.
LI Xiaohuo,DUAN Pengwen,CAO Shufen.Research of methods of speeding the movement of powered support[J].Journal of Fuxin Mining Institute(Natural Science),1996,15(3):313-317.
[8] ZHANG Xin,ZHANG Jianwu,WAN Lirong.The study on advancing velocity of hydraulic support[J].Advanced Materials Research,2010,97/98/99/100/101:3753-3756.
[9] 曹小荣,赵书明.液压支架快速移架系统的研究[J].煤矿机械,2010,31(2):130-132.
CAO Xiaorong,ZHAO Shuming.Research of hydraulically powered support fast moving[J].Coal Mine Machinery,2010,31(2):130-132.
[10] LI Wenying,WEI Jinhong.Control strategy for multi-pump emulsion power station in coal mine face[J].Journal of Coal Science & Engineering,2011,17(4):443-446.
[11] YANG Shibin.Simulation of the unloading pressure and recovery pressure of internal unloading valve for emulsion pump station[J].Applied Mechanics and Materials,2011,48/49:531-536.
[12] ZHANG Chuan,ZHAO Sihai,GUO Ge,et al.Modeling and simulation of emulsion pump station pressure control system based on electro-hydraulic proportional relief valve[J].Applied Mechanics and Materials,2012,190/191:860-864.
[13] 杨飞.高压大流量节能乳化液泵站关键技术研究[D].太原:太原理工大学,2014.
[14] 宿吉奎.乳化液泵站变频恒压控制系统的研究[D].太原:太原理工大学,2012.
[15] 付翔,王然风,袁继成,等.煤矿乳化液泵变频/工频同步切换控制[J].工矿自动化,2017,43(1):77-80.
FU Xiang,WANG Ranfeng,YUAN Jicheng,et al.Switching control between variable frequency and power frequency of emulsion pump in coal mine[J].Industry and Mine Automation,2017,43(1):77-80.