图1 永磁悬浮带式输送机结构
Fig.1 Structure of permanent magnetic suspension belt conveyor
胡坤1,2, 刘杨2, 王方涛2, 程刚1,2
(1.安徽理工大学 安徽矿山机电装备协同创新中心, 安徽 淮南 232001;2.安徽理工大学 机械工程学院, 安徽 淮南 232001)
摘要:建立了永磁悬浮带式输送机悬浮支撑系统三维模型,对不同磁性输送带形状、永磁体布置形式、永磁体形状、偏载条件下永磁悬浮支撑系统稳定性进行了仿真。结果表明:槽型磁性输送带稳定性优于平型、V型磁性输送带,且承载能力表现最稳定;永磁体采用槽型结构时磁性输送带稳定性和承载能力较好;偏载会加剧磁性输送带的跑偏。为有效解决磁性输送带跑偏问题,设计了一种槽型磁性输送带防跑偏装置,通过在槽型磁性输送带两侧安装辅助辊轮,能进一步提高永磁悬浮带式输送机悬浮支撑系统的稳定性。
关键词:带式输送机; 永磁悬浮; 磁性输送带; 永磁体; 偏载; 防跑偏
带式输送机具有运量大、运输距离长、可连续运输等特点,广泛应用于煤炭领域[1-3]。但输送带易跑偏,托辊与输送带之间的摩擦会使输送带磨损严重,并易使输送带过热,形成火灾和爆炸的隐患[4]。采用无托辊的支撑结构是解决上述问题的关键。现阶段常见的无托辊式带式输送机主要有气垫式带式输送机、液垫式带式输送机和磁垫式带式输送机3种[5],其中气垫式带式输送机能源利用率较低,液垫式带式输送机存在液体浸湿物料的问题,磁垫式带式输送机是近年来出现的一种极具发展潜力的新型低阻力无托辊式带式输送机[6-7],具有节能环保、运行阻力小、震动噪声小等特点。程刚[8]对磁垫式带式输送机的电磁悬浮支撑模式和永磁悬浮支撑模式进行了比较分析,并设计了采用永磁悬浮支撑装置的磁垫式带式输送机的基本结构;李德永[9]对永磁悬浮带式输送机的悬浮支撑系统进行了理论研究并试制了样机。综合相关研究可知,悬浮支撑系统对永磁悬浮带式输送机正常运行起着至关重要的作用,有必要对悬浮支撑系统稳定性进行深入研究。本文以永磁悬浮带式输送机的悬浮支撑系统为研究对象,建立了永磁悬浮支撑系统三维模型,并对模型在不同结构参数下的稳定性进行了仿真分析,为永磁悬浮支撑系统结构的改进与优化提供了依据。
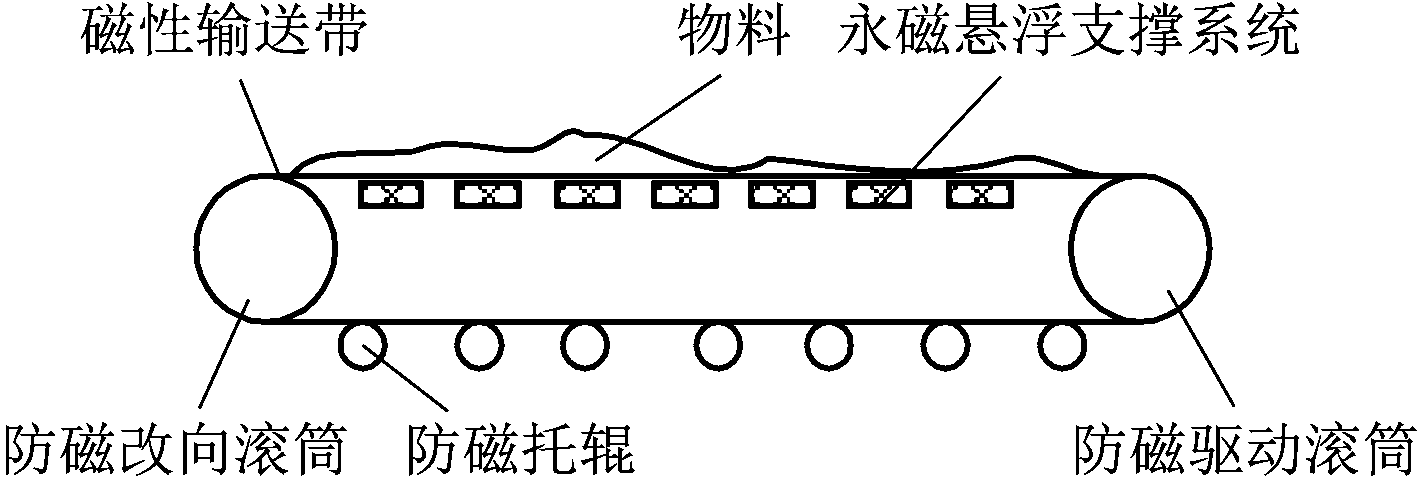
永磁悬浮带式输送机以永磁悬浮支撑结构替代传统托辊支撑结构,实现无托辊式非接触支撑,并采用防磁滚筒和防磁托辊,以防对永磁悬浮支撑系统产生干扰,其结构如图1所示。
图1 永磁悬浮带式输送机结构
Fig.1 Structure of permanent magnetic suspension belt conveyor
永磁悬浮支撑系统主要包括磁性输送带和布置在其下方的永磁体,磁性输送带与永磁体磁性相斥,磁性输送带在永磁体产生的磁场中受到向上的斥力足够大时能够悬浮。永磁悬浮支撑系统三维模型如图2所示。永磁体静止,磁性输送带在X轴方向做低速且匀速运动。该模型基于如下假设[10-12]:① 只考虑结构问题,忽略内阻隙、漏磁,空气气隙均匀,永磁体磁化曲线为线性关系;② 磁材料各项物理参数均匀,且各向同性;③ 忽略磁材料之间的干扰,只考虑磁性输送带和永磁体之间的耦合作用力。
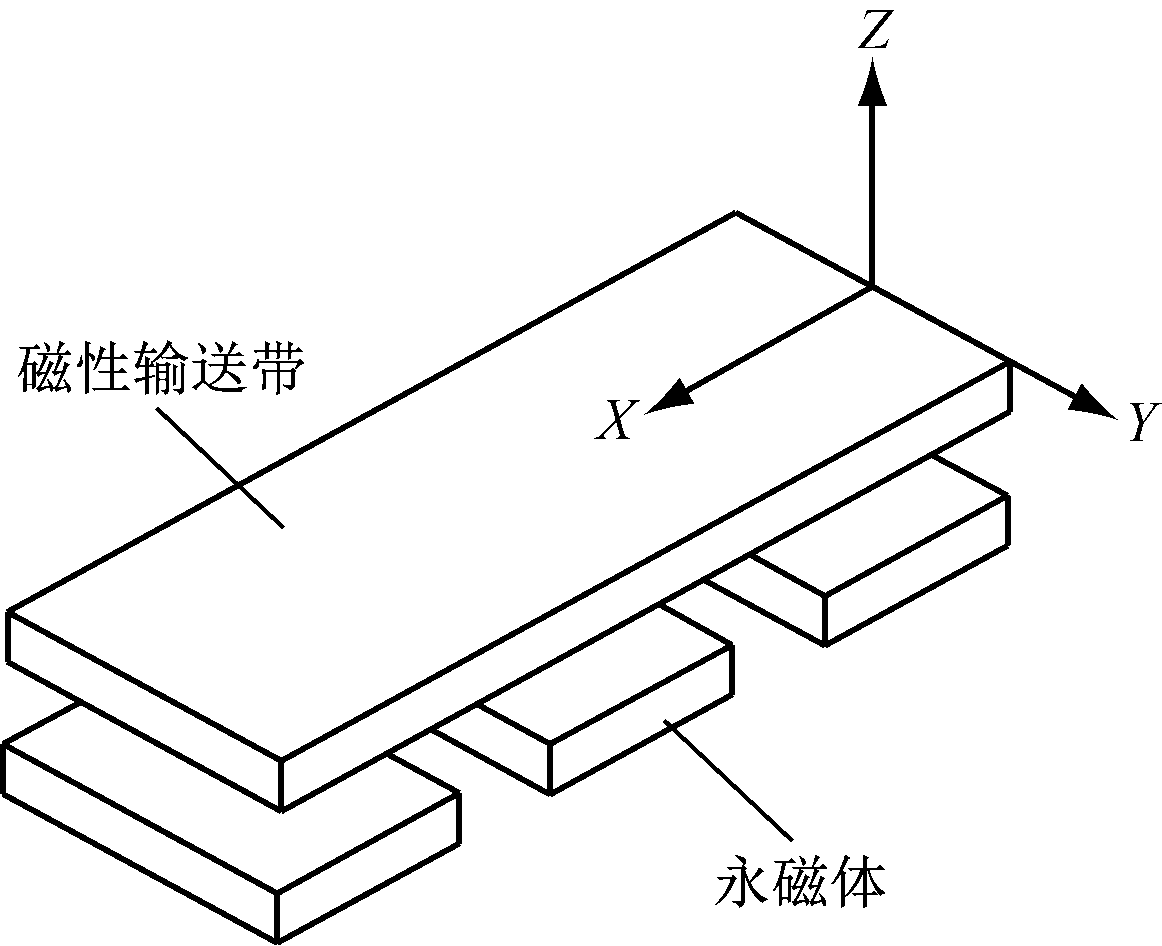
图2 永磁悬浮支撑系统三维模型
Fig.2 3D model of permanent magnetic suspension support system
采用的仿真计算环境为Ansoft 12[13],磁力计算方法选择有限单元法[14-15],仿真步骤:① 指定求解器类型,选择静磁场;② 创建几何模型并指定材料属性;③ 施加边界条件和源;④ 添加求解选项并验证模型;⑤ 求解;⑥ 后处理绘制场量图和取数据。
永磁悬浮支撑系统三维模型参数:磁性输送带和永磁体均采用钕铁硼材料,且体积和厚度均相同,磁性输送带和永磁体间气隙为5 mm,矫顽力为890 000 A/m,剩磁为1.18 T,磁性输送带和永磁体充磁方向相反。
考虑到永磁悬浮带式输送机的工况条件,可将模型视为在静态环境下仿真。通过使磁性输送带位置向Y轴正方向移动,模拟磁性输送带发生偏移时的受力变化。
磁性输送带分别为平型、V型、槽型时的永磁悬浮支撑系统三维模型如图3所示。
仿真得到不同形状磁性输送带在Y,Z轴方向上受力随偏移距离变化的曲线,如图4所示。
从图4(a)可看出,3种形状磁性输送带在Y轴正方向上受力均随着偏移距离增加而逐渐增大,该受力会使磁性输送带偏移趋势加大,表明3种形状磁性输送带发生跑偏后都不能自动回正,但槽型磁性输送带在Y轴正方向上受力随着偏移距离的增加变化最小,稳定性最好,最容易发生跑偏的是平型

(a) 平型
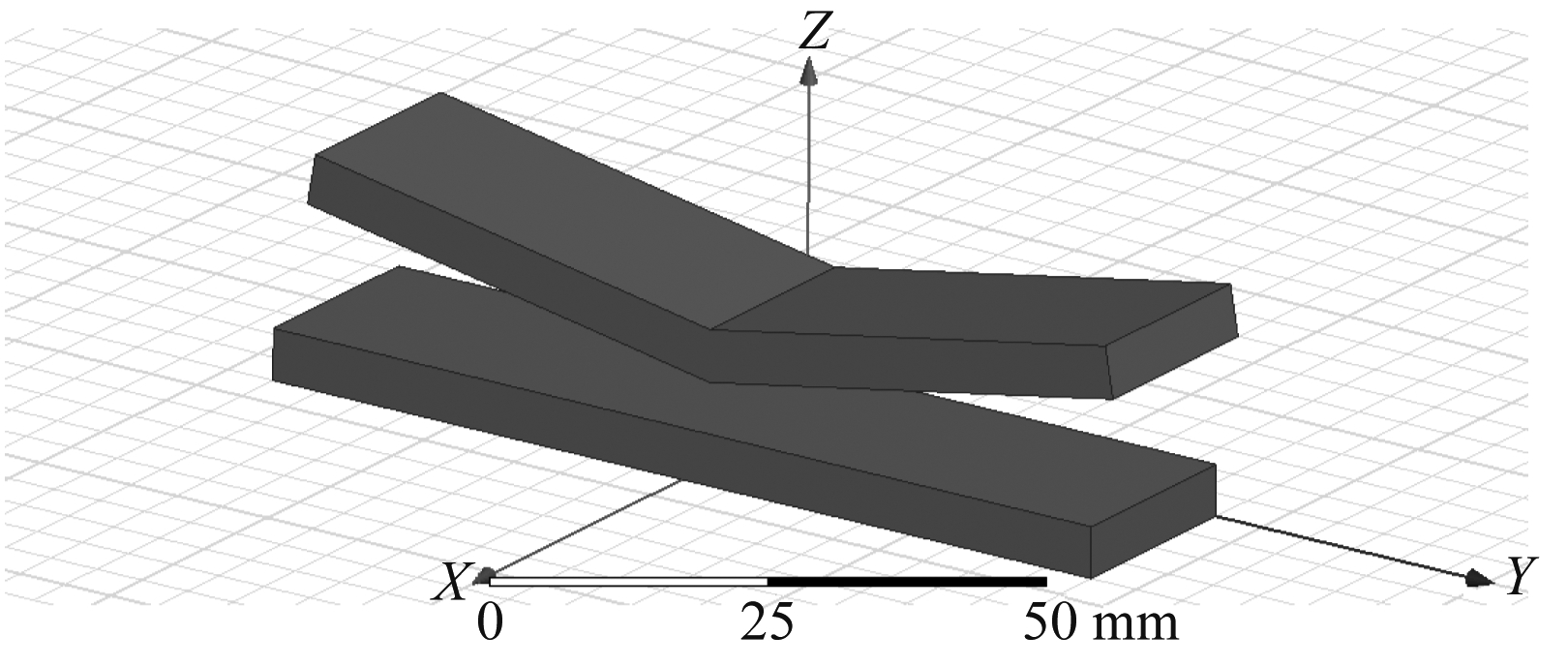
(b) V型

(c) 槽型
图3 不同磁性输送带形状下永磁悬浮支撑系统三维模型
Fig.3 3D model of permanent magnetic suspension support system under different magnetic conveyor belt shape
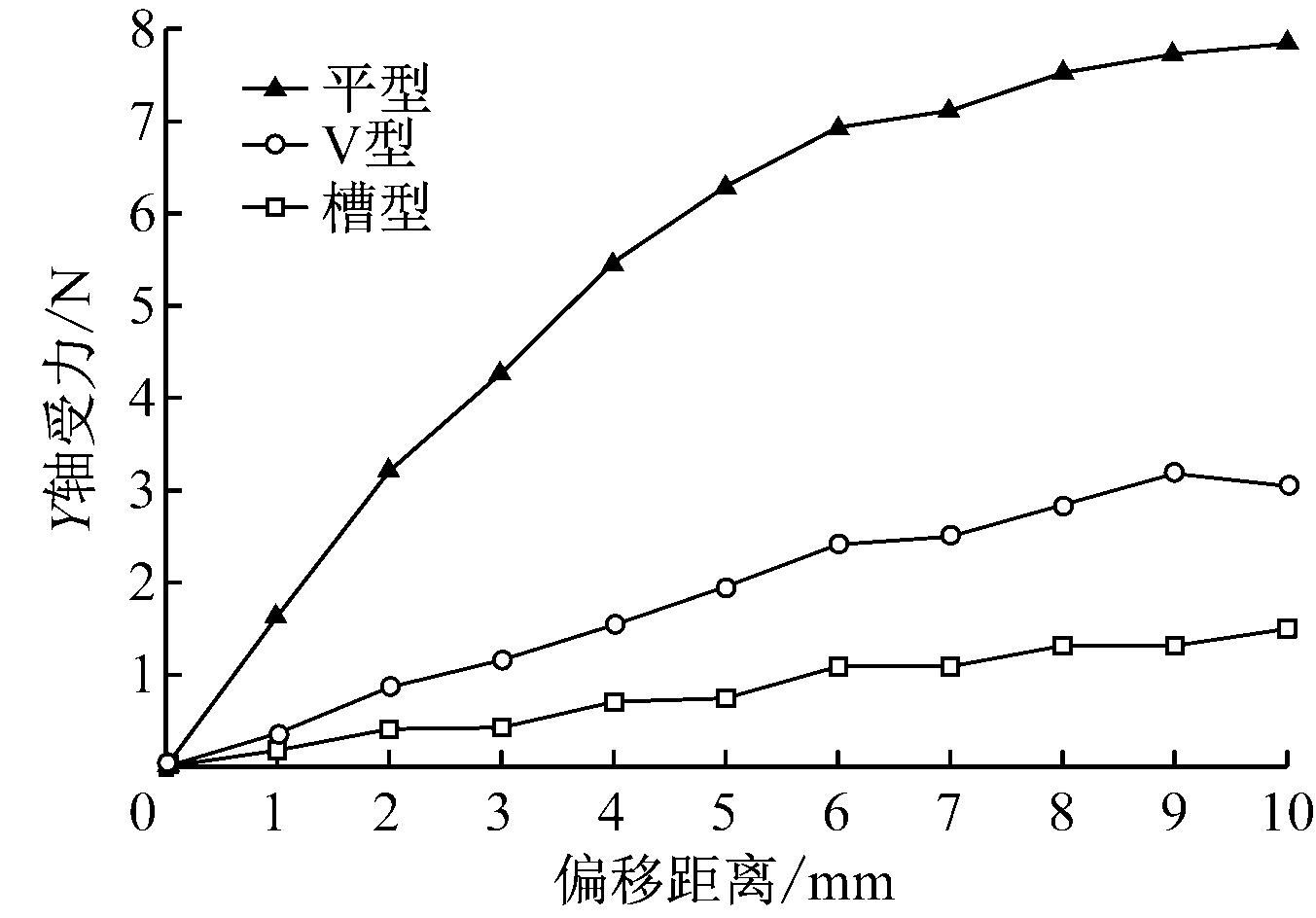
(a)Y轴方向上磁性输送带受力
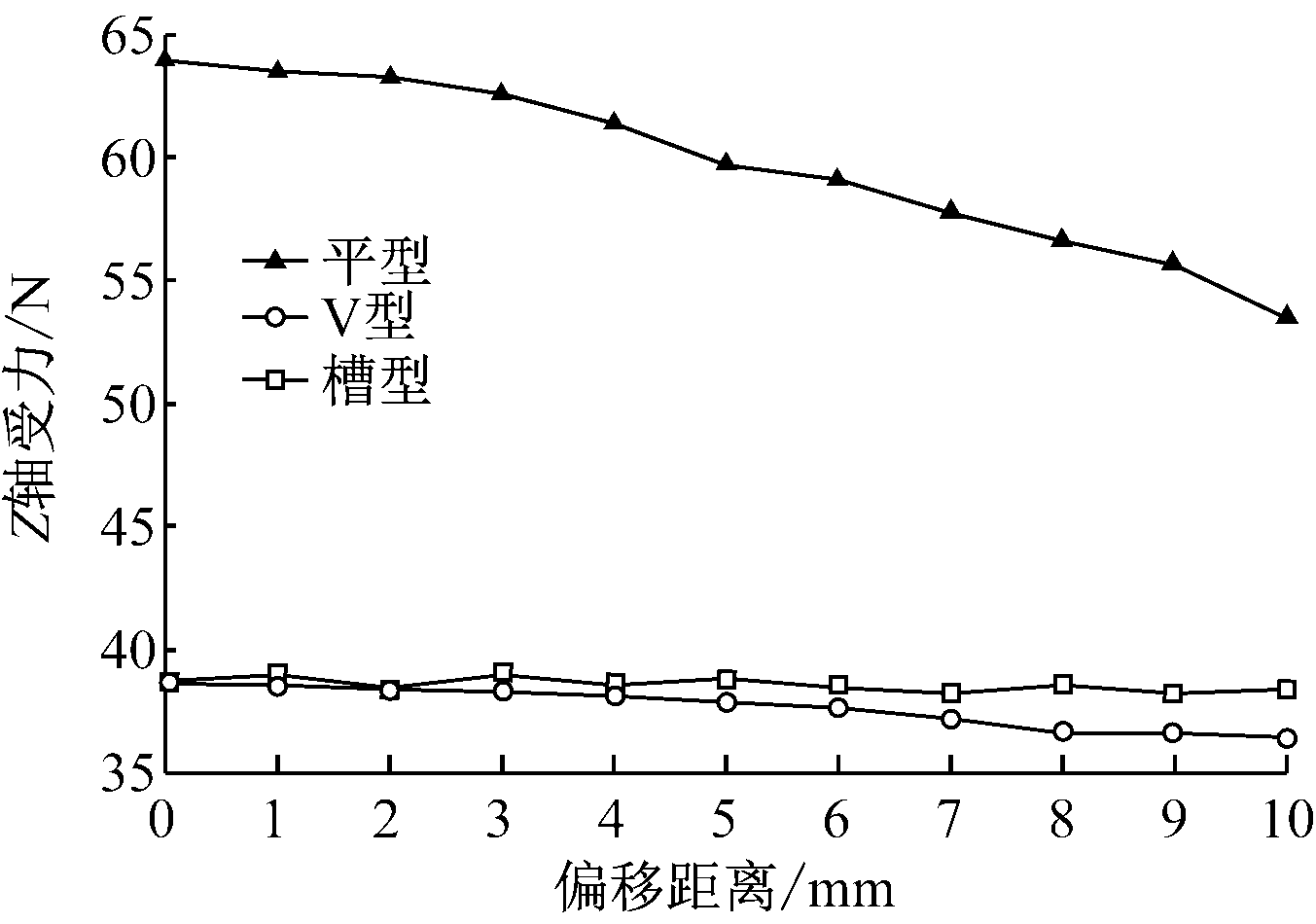
(b)Z轴方向上磁性输送带受力
图4 不同形状磁性输送带受力随偏移距离变化曲线
Fig.4 Force curves of different shaped magnetic conveyor belt varying with offset distance
磁性输送带。从图4(b)可看出,平型磁性输送带在Z轴方向上受力最大,其次是槽型磁性输送带,V型磁性输送带受力最小,表明平型磁性输送带承载能力最大,V型磁性输送带承载能力最小;随着偏移距离增加,3种形状磁性输送带在Z轴方向上受力都逐渐减小,但槽型磁性输送带受力变化最小,承载能力上表现较稳定。
选取在稳定性和承载能力上综合表现较好的槽型磁性输送带,在如图3(c)所示模型基础上,将永磁体分别分成2,3块,且永磁体之间间距均为5 mm,建立如图5所示模型。
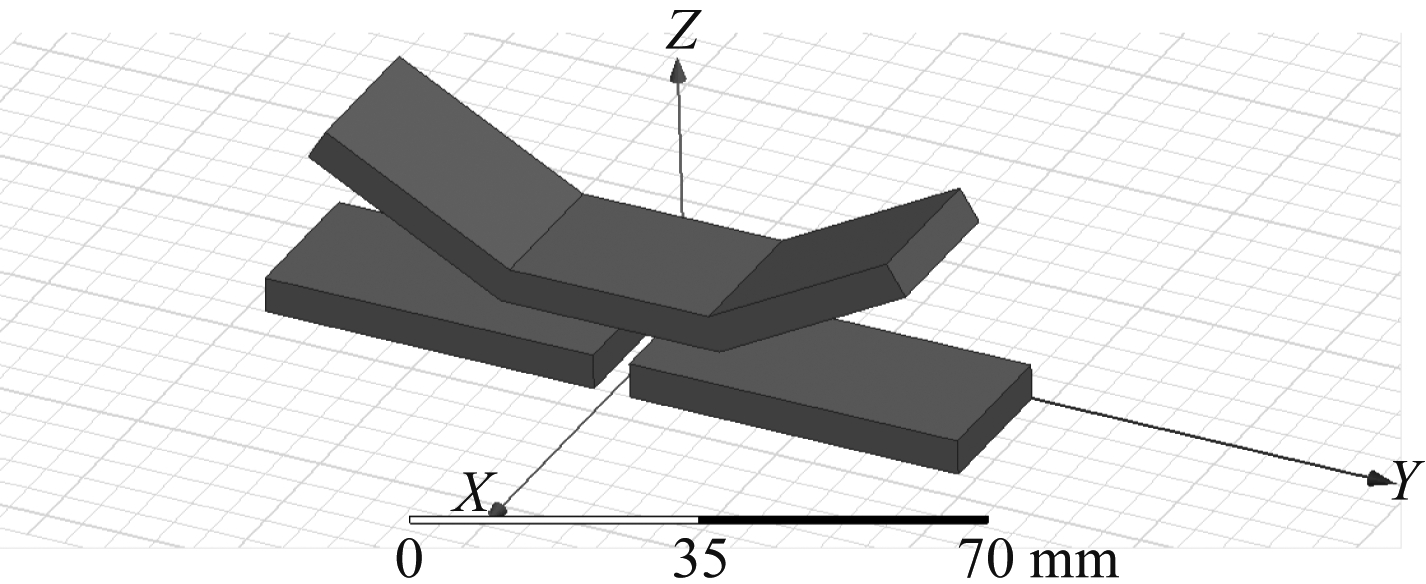
(a) 永磁体为2块
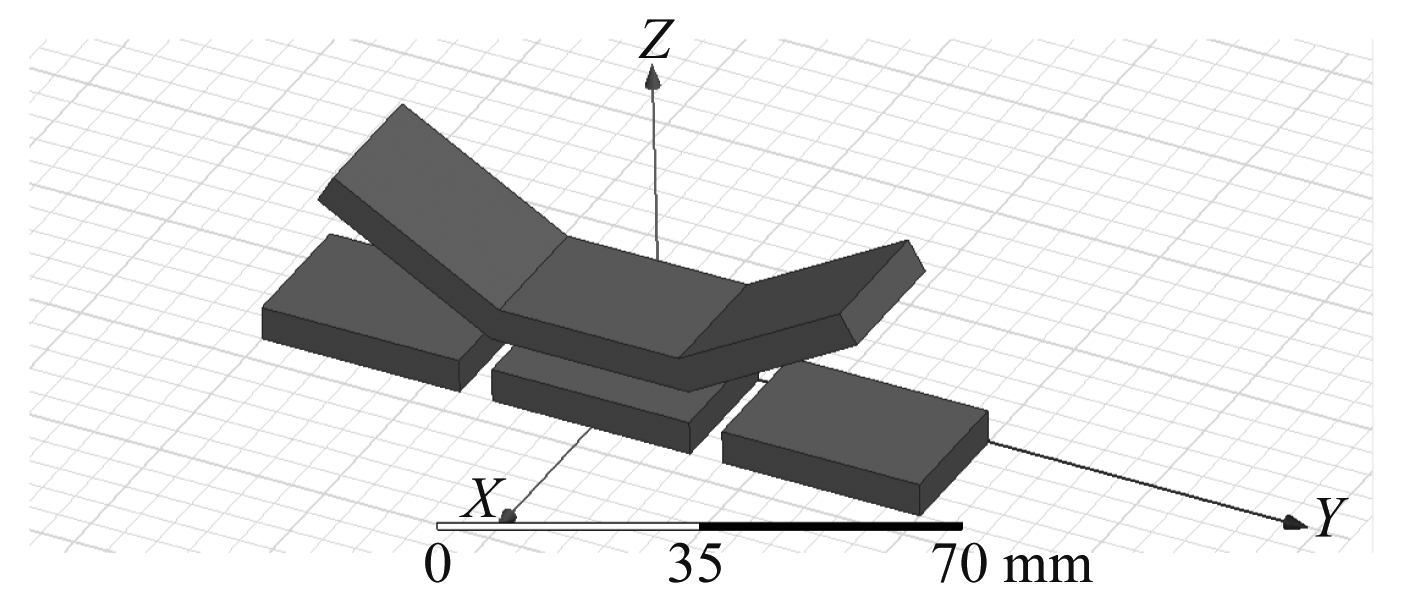
(b) 永磁体为3块
图5 不同永磁体布置形式下永磁悬浮支撑系统三维模型
Fig.5 3D model of permanent magnetic suspension support system under different permanent magnet arrangement
仿真得到不同永磁体布置形式下磁性输送带在Y,Z轴方向上受力随偏移距离变化的曲线,如图6所示。
从图6(a)可看出,当永磁体为1,2块时,磁性输送带在Y轴正方向上受力均随着偏移距离增加而逐渐增大,该受力会使磁性输送带偏移趋势加大,表明磁性输送带发生跑偏后不能自动回正;当永磁体为3块时,磁性输送带在Y轴负方向上受力随着偏移距离增加先增大后减小,该受力会使磁性输送带发生跑偏后自动回正,表明永磁体为3块时磁性输送带稳定性最好。从图6(b)可看出,永磁体分块数越多,磁性输送带在Z轴方向上受力越小,永磁体为1块时磁性输送带承载能力最大;当永磁体为1,2块时,磁性输送带在Z轴方向上受力随着偏移距离增加而逐渐减小,但当永磁体为3块时,磁性输送带在Z轴方向上受力随着偏移距离增加而逐渐增大,即承载能力有所提高。
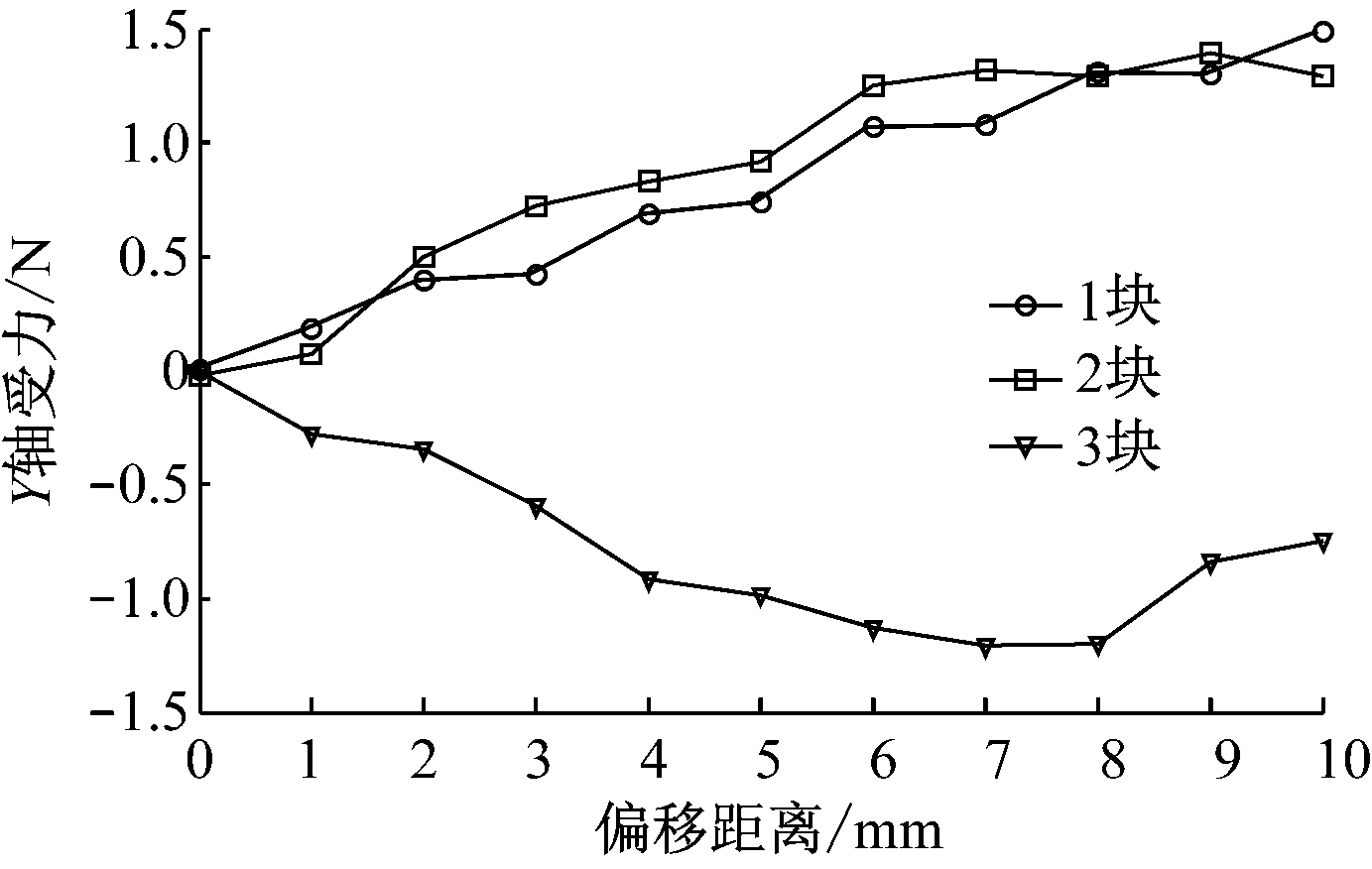
(a)Y轴方向上磁性输送带受力
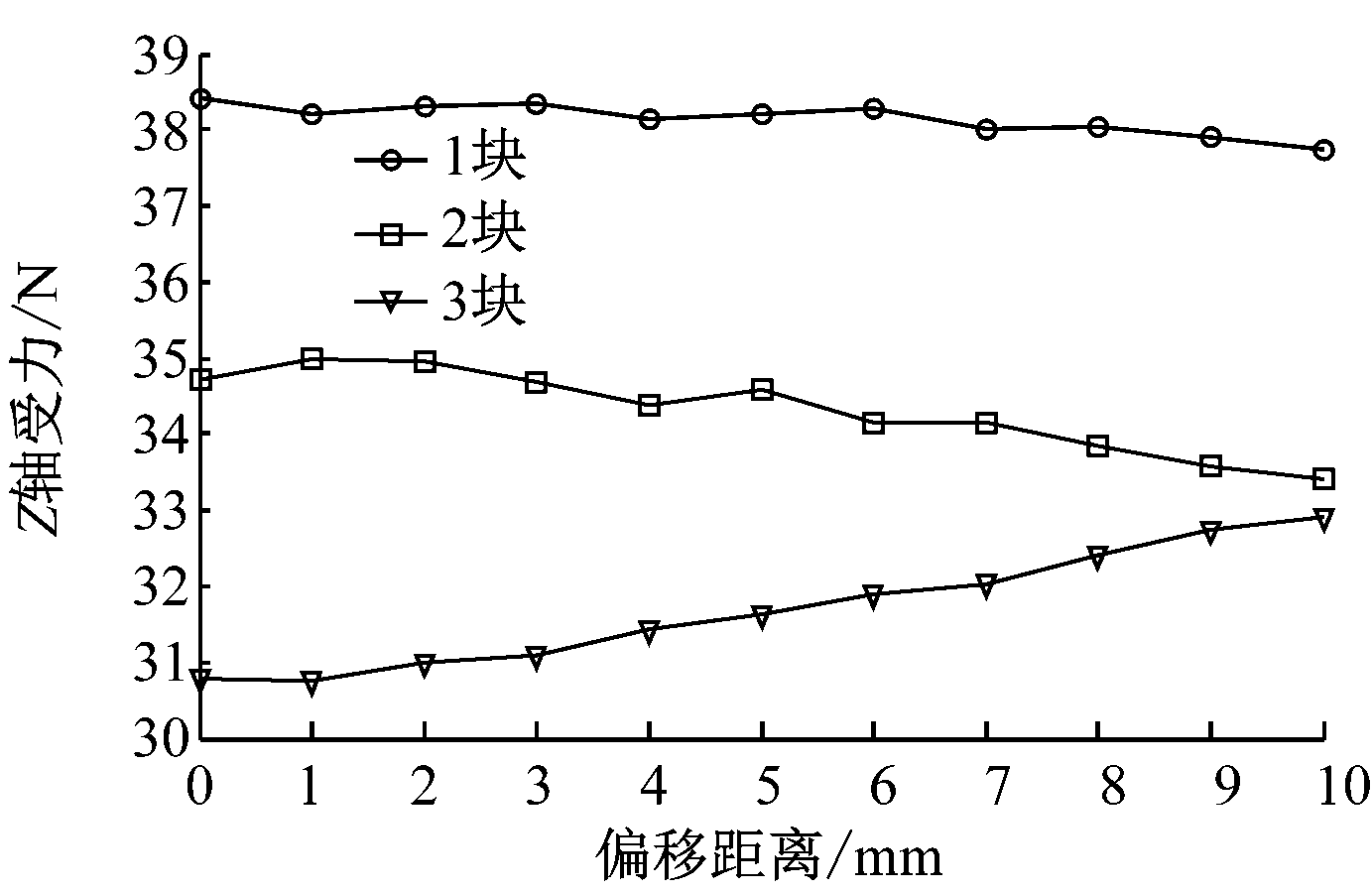
(b)Z轴方向上磁性输送带受力
图6 不同永磁体布置形式下磁性输送带受力随偏移距离变化曲线
Fig.6 Force curves of magnetic conveyor belt varying with offset distance under different permanent magnet arrangement
在如图3(c)所示模型基础上,将永磁体从平型换成槽型,建立如图7所示模型。
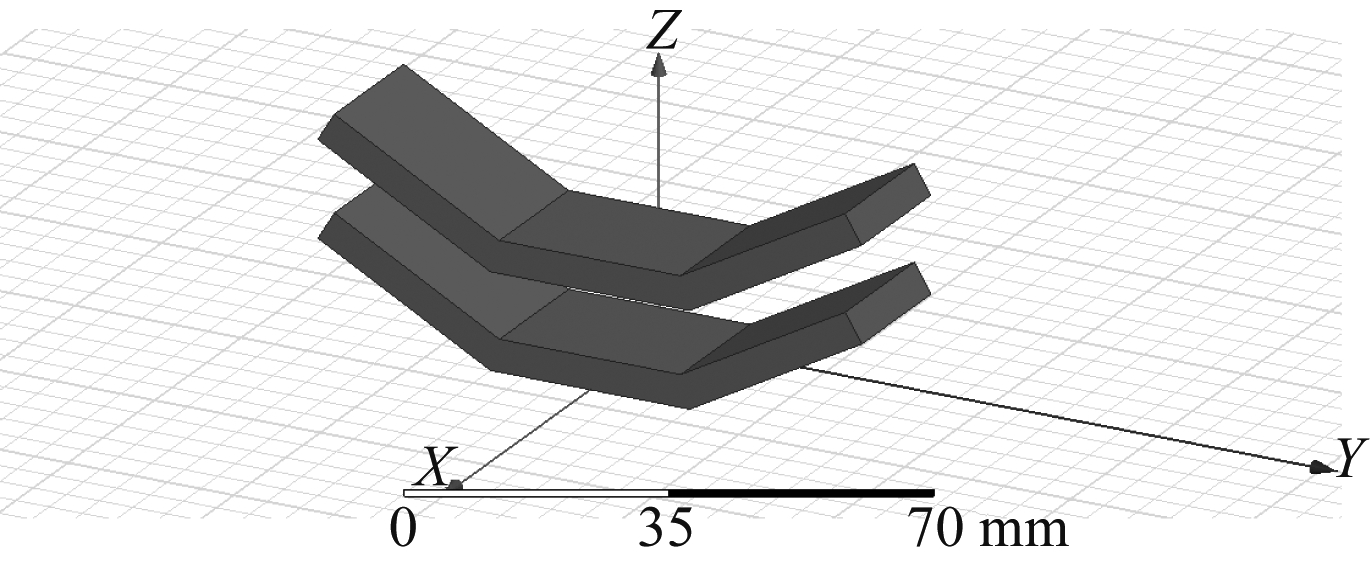
图7 磁性输送带和永磁体均为槽型时永磁悬浮支撑系统三维模型
Fig.7 3D model of permanent magnetic suspension support system with groove-type magnetic conveyor belt and permanent magnet
仿真得到不同永磁体形状下磁性输送带在Y,Z轴方向上受力随偏移距离变化的曲线,如图8所示。
从图8(a)可看出,当永磁体为平型时,磁性输送带在Y轴正方向上受力随着偏移距离增加而逐渐增大,该受力会使磁性输送带偏移趋势加大,表明磁性输送带发生跑偏后不能自动回正;当永磁体为槽型时,磁性输送带在Y轴负方向上受力随着偏移距离增加而增大,该受力会使磁性输送带发生跑偏后自动回正,表明磁性输送带稳定性较好。从图8(b)可看出,当永磁体为槽型时,磁性输送带在Z轴方向上受力比永磁体为平型时大,表明永磁体为槽型时磁性输送带承载能力更大。
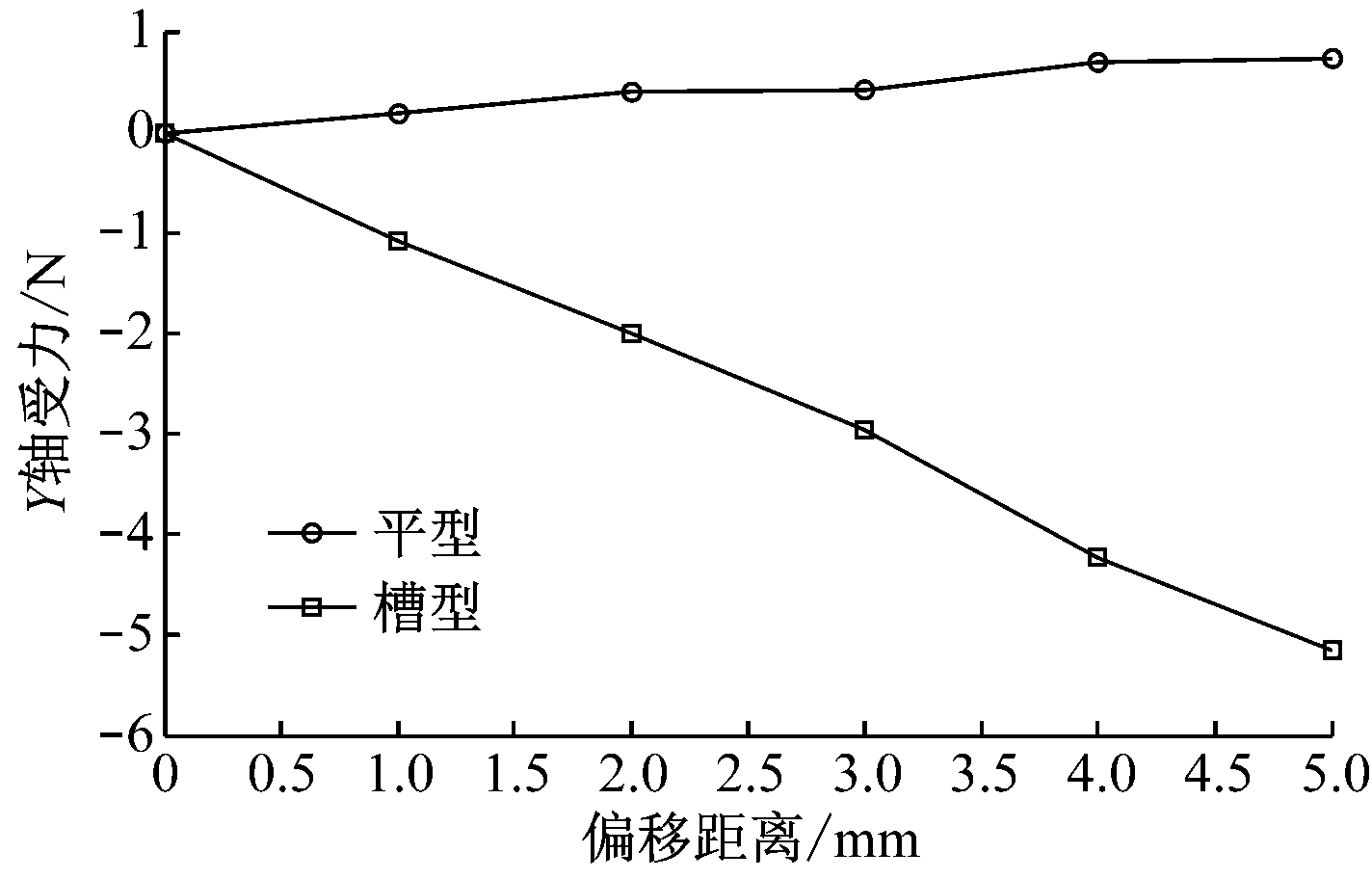
(a)Y轴方向上磁性输送带受力
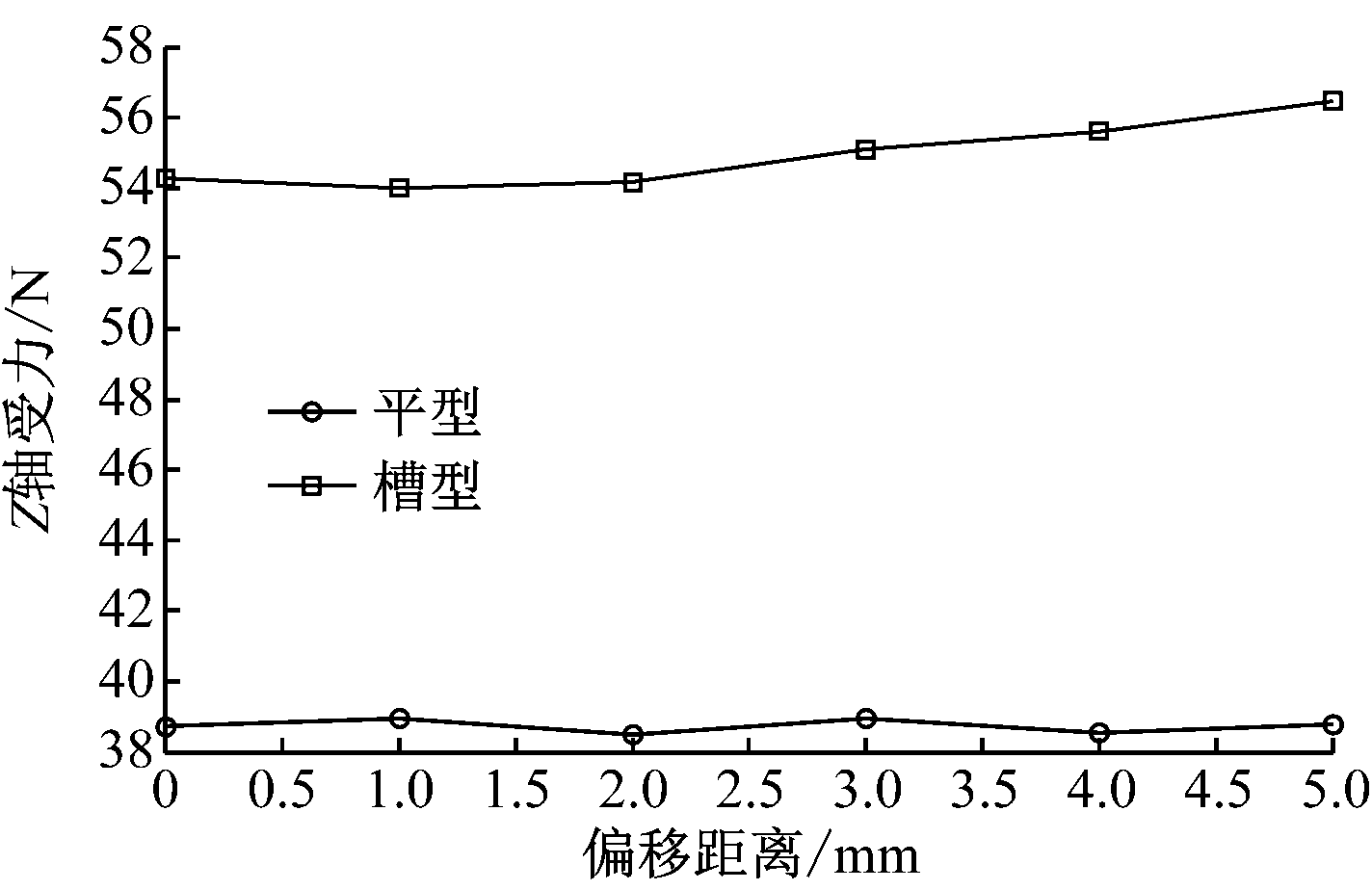
(b)Z轴方向上磁性输送带受力
图8 不同永磁体形状下磁性输送带受力随偏移距离变化曲线
Fig.8 Force curves of magnetic conveyor belt varying with offset distance under different permanent magnet shape
对比图6、图8可看出,永磁体为槽型时磁性输送带受力特性和永磁体分为3块时类似,但稳定性和承载能力更好。
永磁悬浮带式输送机工作时容易发生偏载,即加载时货物重心与磁性输送带几何中心不重合。由于磁斥力与气隙之间的关系,偏载必将导致磁性输送带发生侧倾,且偏载情况越严重,侧倾角越大。选取在稳定性和承载能力上综合表现较好的槽型磁性输送带和槽型永磁体,假设磁性输送带绕中心线发生倾斜,永磁体保持不变,建立如图9所示模型。

图9 磁性输送带偏载时永磁悬浮支撑系统三维模型
Fig.9 3D model of permanent magnetic suspension support system under partial load of magnetic conveyor belt
仿真得到偏载时磁性输送带在Y,Z轴方向上受力随侧倾角变化的曲线,如图10所示。
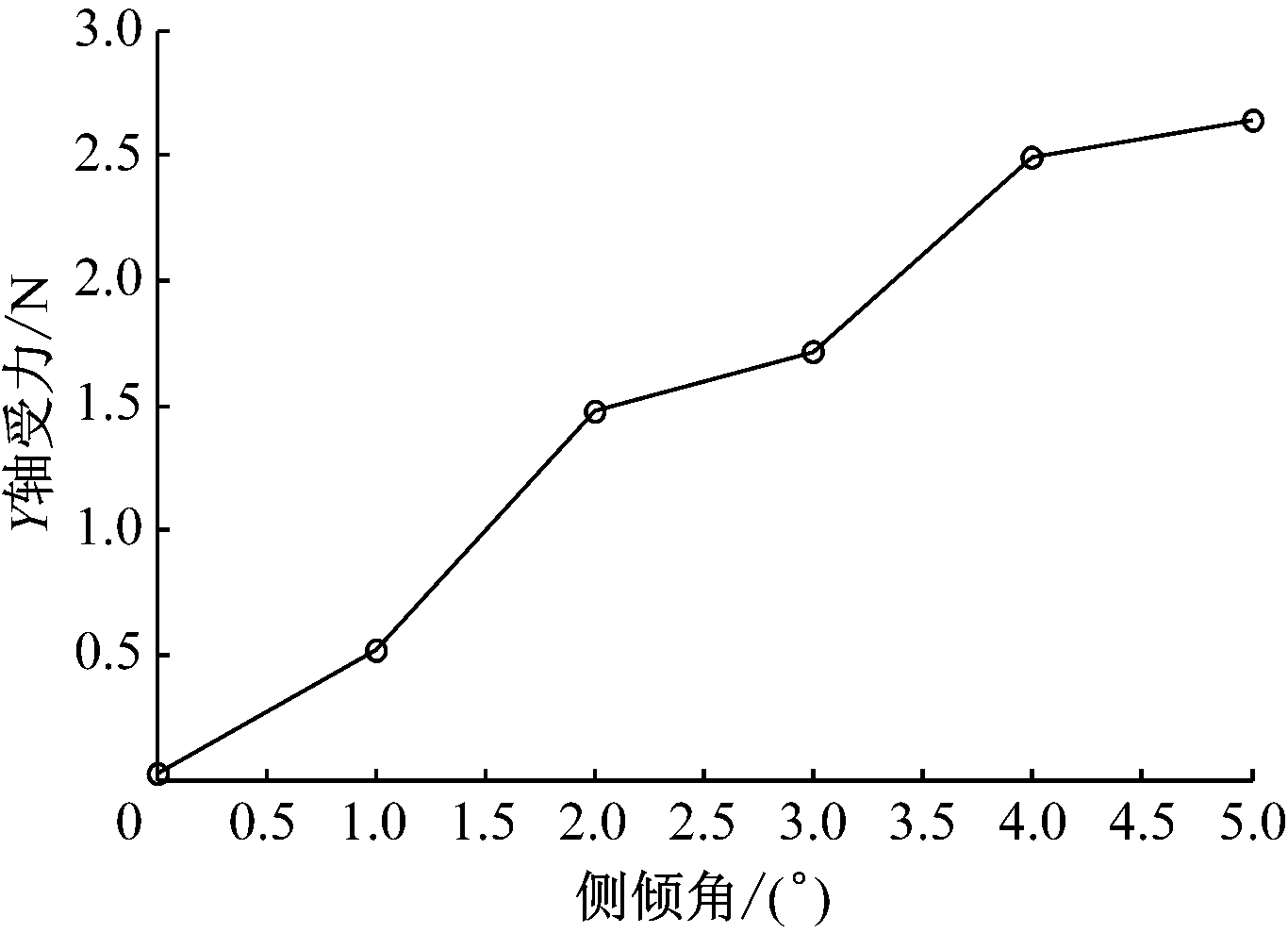
(a)Y轴方向上磁性输送带受力
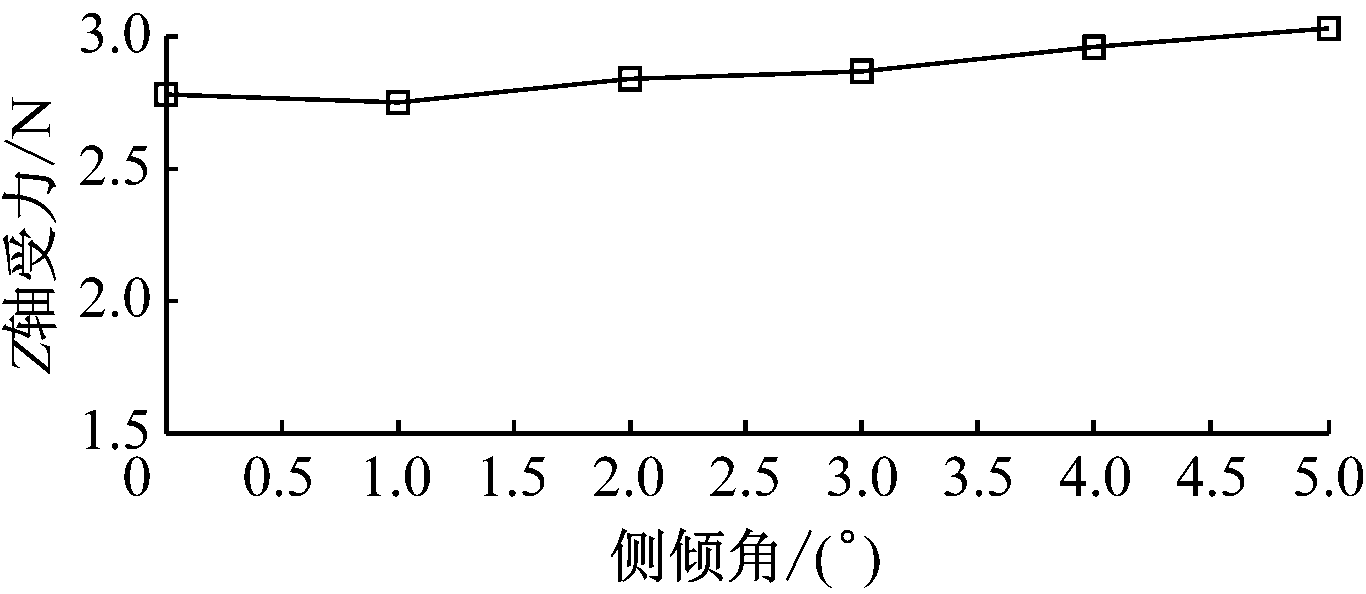
(b)Z轴方向上磁性输送带受力
图10 偏载时磁性输送带受力随侧倾角变化曲线
Fig.10 Force curves of magnetic conveyor belt varying with roll angle under partial load
从图10(a)可看出,随着侧倾角增大,磁性输送带在Y轴正方向上受力逐渐增大,表明偏载会加剧磁性输送带的跑偏。从图10(b)可看出,磁性输送带在Z轴方向上受力随着侧倾角增大而小幅增大,表明偏载对磁性输送带承载能力影响较小。
由仿真结果可知,偏载不利于永磁悬浮带式输送机正常稳定工作,因此需要在磁性输送带上加装防跑偏装置。本文设计了一种槽型磁性输送带防跑偏装置,如图11所示。在槽型磁性输送带两侧安装辅助辊轮,辅助辊轮采用铝合金或尼龙等非金属防磁材料制作,要求回转阻力小,可一定程度上防止磁性输送带发生侧倾,起到辅助导向及防跑偏的作用。
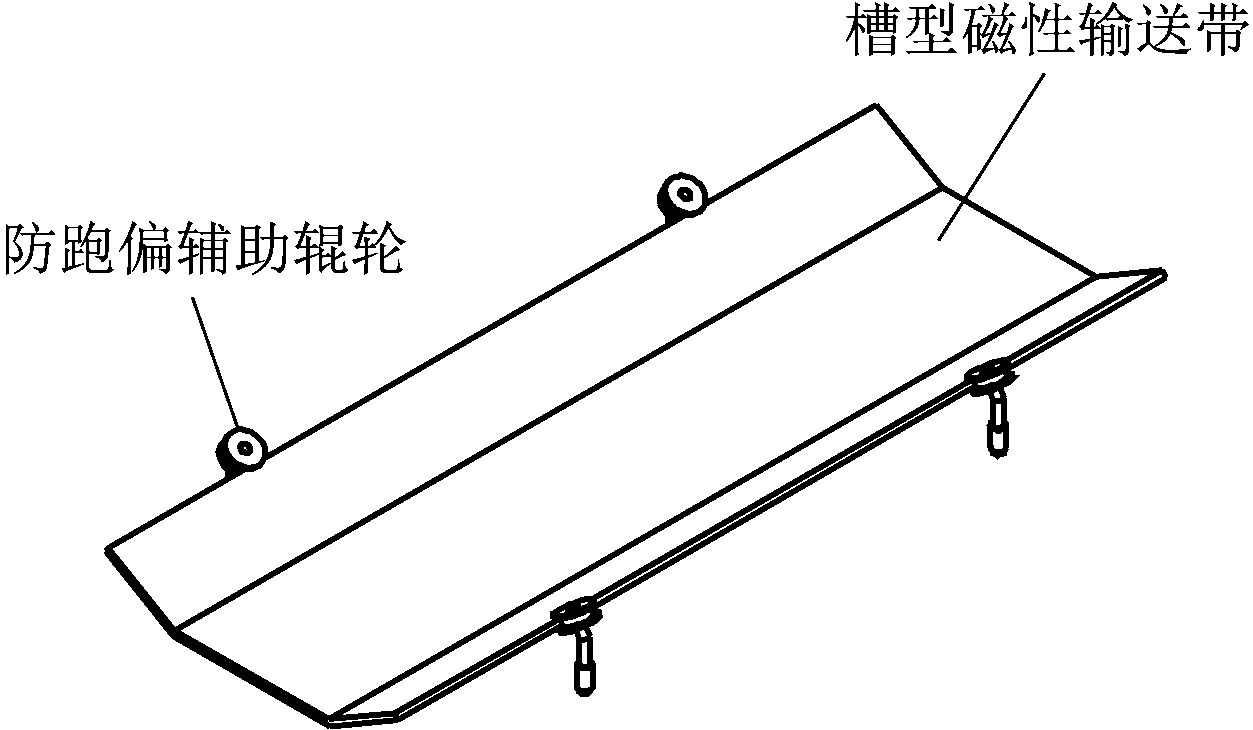
图11 槽型磁性输送带防跑偏装置
Fig.11 Anti-deviation device for groove-type magnetic conveyor belt
对磁性输送带形状、永磁体布置形式、永磁体形状、偏载对永磁悬浮带式输送机悬浮支撑系统稳定性的影响进行了仿真分析,结果表明:槽型磁性输送带稳定性优于平型、V型磁性输送带,且承载能力最稳定;永磁体为槽型时磁性输送带受力特性和永磁体分为3块时类似,但稳定性和承载能力更好;当磁性输送带由于偏载发生侧倾时,随着侧倾角增加,磁性输送带的跑偏加剧。为有效解决磁性输送带跑偏问题,设计了一种槽型磁性输送带防跑偏装置,通过在槽型磁性输送带两侧安装辅助辊轮,能够在一定程度上防止磁性输送带发生跑偏,保证永磁悬浮带式输送机稳定工作。
参考文献(References):
[1] 徐辉,张学军,李继来.带式输送机控制系统硬件在环仿真测试系统[J].工矿自动化,2017,43(6):52-55.
XU Hui,ZHANG Xuejun,LI Jilai.Hardware in the loop simulation test system for belt conveyor control system[J].Industry and Mine Automation,2017,43(6):52-55.
[2] 朱立平,蒋卫良.适用于我国煤矿带式输送机典型机型的研究[J].煤炭学报,2010,35(11):1916-1920.
ZHU Liping,JIANG Weiliang.Study on typical belt conveyor in coal mine of China[J].Journal of China Coal Society,2010,35(11):1916-1920.
[3] 李鹏.带式输送机的可靠性分析及故障诊断专家系统的研究[D].徐州:中国矿业大学,2016:1-36.
[4] 师建国.带式输送机侧向动力学研究[D].阜新:辽宁工程技术大学,2014:1-120.
[5] 孟繁瑜.无托辊带式输送机的研究进展[J].煤炭科学技术,1999,27(8):36-39.
MENG Fanyu.Research and development of non-roller belt conveyor[J].Coal Science and Technology,1999,27(8):36-39.
[6] 林佐轮.基于磁悬浮技术的带式输送机虚拟样机设计研究[D].武汉:武汉理工大学,2012:1-26.
[7] HARRISON A.Belt conveyor research 1980-2000[J].Bulk Solids Handing,2001,21(2):159-164.
[8] 程刚.磁垫式带式输送机的研究[D].淮南:安徽理工大学,2012:1-65.
[9] 李德永.永磁悬浮带式输送机的悬浮支撑系统设计研究[D].淮南:安徽理工大学,2016:1-50.
[10] LI S,FAN Y,FANG J,et al.HTS axial flux induction motor with analytic and FEA modeling[J].Physica C: Superconductivity and Its Applications,2013,494(11):230-234.
[11] FABBRI M,RIBANI P L,ZUFFA D.Design and testing of a magnetically levitated conveyor[J].IEEE Transactions on Magnetics,2013,49(1):577-585.
[12] ISHINO Y,MIZUNO T,TAKASAKI M.Fabrication of power saving solar magnetic suspension system[J].Journal of System Design and Dynamics,2013,7(4):528-538.
[13] 赵博,张洪亮.Ansoft 12在工程电磁场中的应用[M].北京:中国水利水电出版社,2010:192-359.
[14] 洪伟.计算电磁学研究进展[J].东南大学学报(自然科学版),2002,32(3):335-339.
HONG Wei.Progress in computational electromagnetics[J].Journal of Southeast University (Natural Science Edition),2002,32(3):335-339.
[15] 田瑾.电磁问题分析中的有限元方程组的快速求解技术[D].西安:西安电子科技大学,2012:1-49.
HU Kun1,2, LIU Yang2, WANG Fangtao2, CHENG Gang1,2
(1.Anhui Mining Machinery and Electrical Equipment Collaborative Innovation Center, Anhui University of Science and Technology, Huainan 232001, China; 2.College of Mechanical Engineering, Anhui University of Science and Technology, Huainan 232001, China)
Abstract:A 3D model of suspension support system of permanent magnetic suspension belt conveyor was established. Stability of permanent magnetic suspension support system under different magnetic conveyor belt shape, permanent magnet arrangement, permanent magnet shape and partial load condition were simulated. The results show that stability of groove-type magnetic conveyor belt is better than that of flat-type and V-type magnetic conveyor belts with stable bearing capacity. Stability and bearing capacity of conveyor belt are better when permanent magnet has groove-type structure. Partial load will increase deviation of magnetic conveyor belt. In order to effectively solve deviation problem of magnetic conveyor belt, an anti-deviation device for groove-type magnetic conveyor belt was designed. By installing auxiliary rollers on both sides of the groove-type magnetic conveyor belt, stability of the suspension support system of permanent magnetic suspension belt conveyor can be further improved.
Key words:belt conveyor; permanent magnetic suspension; magnetic conveyor belt; permanent magnet; partial load; anti-deviation
收稿日期:2017-07-10;
修回日期:2017-12-14;
责任编辑:盛男。
基金项目:国家自然科学基金资助项目(51641501)。
作者简介:胡坤(1981-),男,安徽淮南人,副教授,博士,研究方向为运输机械,E-mail:hk924@126.com。
引用格式:胡坤,刘杨,王方涛,等.永磁悬浮带式输送机悬浮支撑系统稳定性研究[J].工矿自动化,2018,44(1):79-84.
HU Kun,LIU Yang,WANG Fangtao,et al.Research on stability of suspension support system of permanent magnetic suspension belt conveyor[J].Industry and Mine Automation,2018,44(1):79-84.
文章编号:1671-251X(2018)01-0079-06
DOI:10.13272/j.issn.1671-251x.2018.01.2017070027
中图分类号:TD528.1
文献标志码:A 网络出版时间:2017-12-26 11:32
网络出版地址:http://kns.cnki.net/kcms/detail/32.1627.TP.20171225.0843.002.html