图1 钻孔轨迹三要素在地理坐标系下的定义
Fig.1 The definition for three elements of drilling trajectory in geographical coordinate system
刘宗伟, 宋建成
(太原理工大学 煤矿电气设备与智能控制山西省重点实验室, 山西 太原 030024)
摘要:针对煤矿用普通中小型回转钻机的随钻测斜系统姿态数据无法在线上传的问题,提出了一种离线式数据同步方法。该方法是在打钻过程中,孔口同步仪和孔底探管分别对钻杆数据和钻孔测点姿态数据进行实时采集,打钻完成后,同步仪统一读取全部探管数据,同时采用同步方法进行有效测点筛选,最终实现钻孔轨迹绘制。试验结果表明,该离线式数据同步方法使钻杆数据和姿态数据实现了同步,能够在不改动钻机结构的前提下充分满足普通中小型回转钻机的随钻测斜需求。
关键词:回转钻机; 随钻测斜; 离线式数据同步; 钻孔轨迹
随钻测斜技术在现代钻井测井中应用广泛[1]。目前,在煤矿钻井领域中占据主导地位的钻机是水平千米定向钻机。该定向钻机是由石油钻井领域延伸到煤矿钻井领域的[2],由于工作环境的变化,水平千米定向钻机在煤矿实际钻井作业中存在一定的缺陷,比如由于定向钻探施工过程中钻杆不旋转,排渣情况较差,极易发生卡钻、埋钻等事故,甚至会发生钻杆抱死无法退钻等情况,导致定向钻孔的成孔率大幅度降低。另外,水平定向千米钻机也不适用于短距离(通常小于或等于200 m)、施工空间有限的钻孔作业,比如相邻综采工作面巷道之间的水管敷设。通常煤矿井下采用普通中小型回转钻机来应对此种工程需求。小型回转钻机体积小、施工占用空间小、可拆卸成几部分,方便运输及短距离、狭小施工空间的钻孔作业。但是由于在打钻过程中回转钻机的钻头是由钻杆旋转扭力驱动,钻孔的实时姿态数据并不能像千米钻机那样可通过中心穿缆的传输方式将数据传送至孔口计算机进行轨迹绘制。所以,需要建立一种适用于普通中小型回转钻机的钻孔姿态数据上传机制。然而,目前普通回转钻机生产商并未提供合适的轨迹绘制方法,尤其是孔底数据上传方法,从而导致在煤矿井下使用回转钻机施工时,工人只能通过记录打入的钻杆数来估算钻孔长度,而并不能获得真实的钻孔轨迹。煤矿井下迫切需要一种低成本、不改变钻机和钻杆结构的钻孔无线数据采集和上传方法来配套普通回转钻机使用,使得普通回转钻机具备随钻测斜功能。随钻测斜系统的无线通信方式目前主要有泥浆脉冲、电磁波和声波3种[3]。其中,石油领域以泥浆脉冲方式应用最为广泛,市政敷设工程以电磁波应用最为广泛[4],声波方式由于随着钻进深度的增加而声波会急剧衰减[5],目前仍处于研究阶段。泥浆脉冲通信方式主要依靠钻井液重力产生的压力来传输信号,主要应用于垂直井或者L型井,对于煤矿井下近水平钻井要求,泥浆脉冲通信方式并不适合。电磁波通信通过将一个低频天线发射器装在测井仪内实现孔底和地面间通信,缺点是功耗大、体积大、价格昂贵,通信质量还受到井下电气设备的干扰和煤层电阻率的影响,因此不适合于煤矿钻井。
鉴此,本文基于随钻测斜原理,根据回转钻机的特点,提出一种适用于普通中小型回转钻机的离线式数据同步方法,该方法具有成本低廉、不受外界干扰等特点。
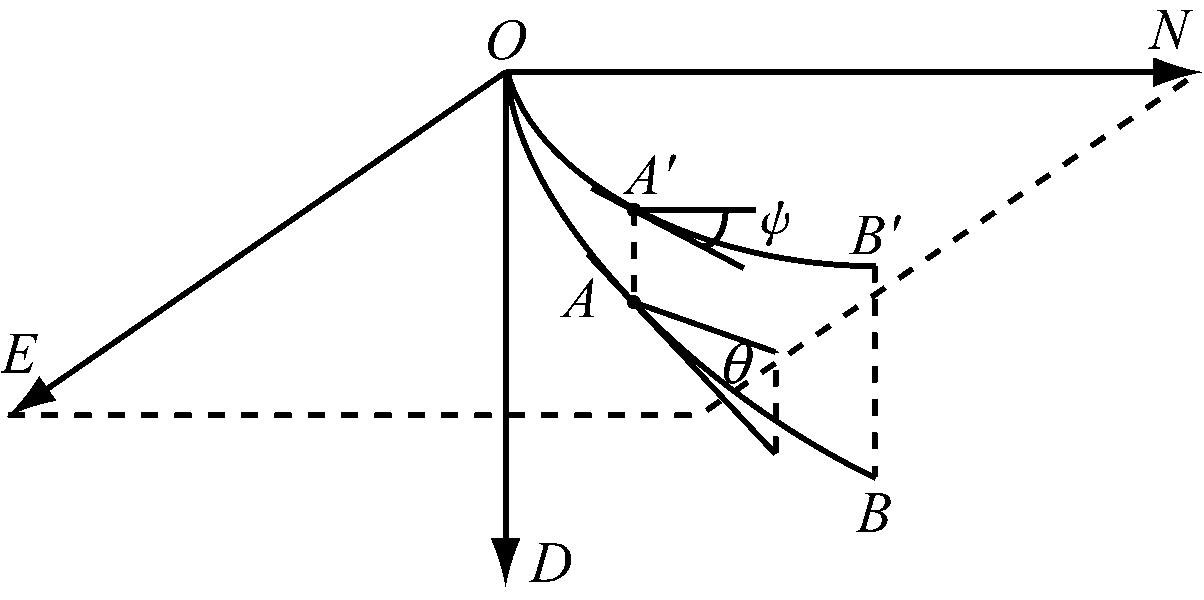
一般认为钻孔轨迹由空间曲线构成[6],通常可通过有限测点来绘制近似的钻孔轨迹,有限测点指的是打钻过程中实际轨迹上某些特定的点。描述轨迹上有效测点的参数有方位角、倾角、钻杆长度,即钻孔轨迹三要素[7]。钻孔轨迹三要素是基于地理坐标系定义的,如图1所示。
图1 钻孔轨迹三要素在地理坐标系下的定义
Fig.1 The definition for three elements of drilling trajectory in geographical coordinate system
其中地理坐标系为北-东-下坐标系(NED,简称n系)。对于轨迹OAB上任意一点A,其方位角定义为它的切线在水平面ONE的投影与北向坐标轴ON的夹角ψ,倾角定义为它的切线与水平面ONE的夹角θ。
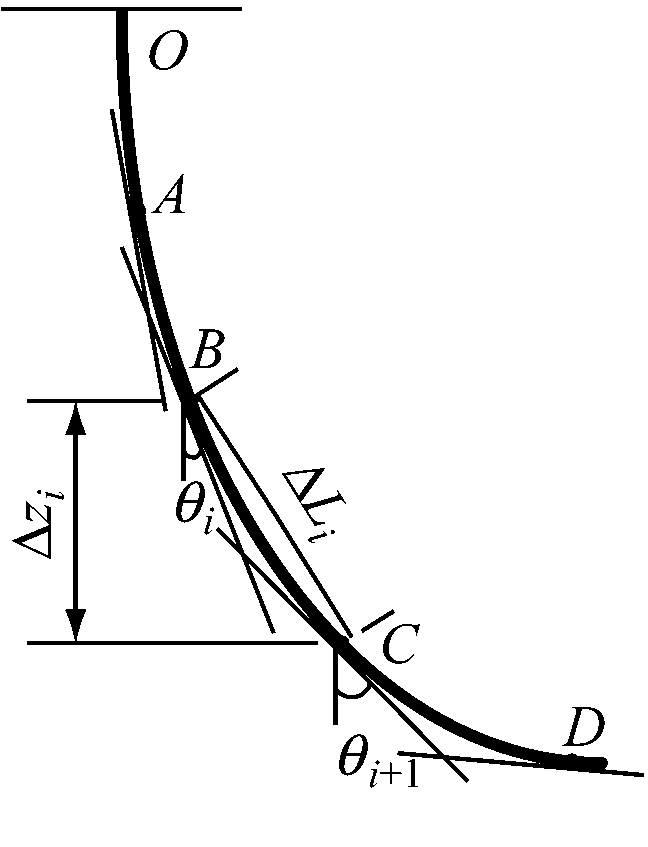
首先计算出空间测点在地理坐标系下的相对坐标,即测点A(xA,yA,zA),然后用线段连接,就形成近似钻孔的折线轨迹。利用平衡正切法绘制的空间轨迹如图2所示。
(a) 空间轨迹
(b) BC段轨迹
图2 利用平衡正切法绘制的空间轨迹
Fig.2 Space trajectory of equilibrium tangent method
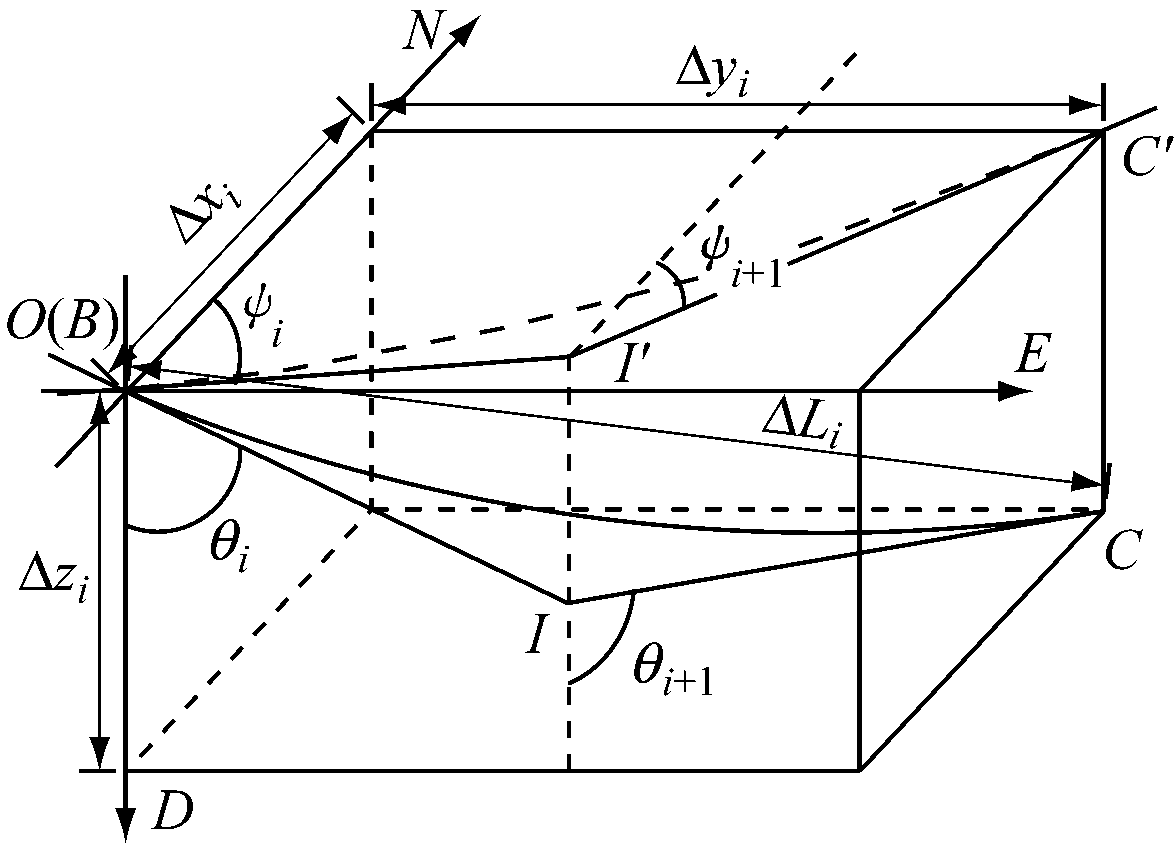
假设轨迹上相邻的2个测点B和C,其坐标设为B(xi,yi,zi)和C(xi+1,yi+1,zi+1)。且设定B到C的直线距离为ΔLi,B点和C点分别为第i节钻杆测点和第i+1节钻杆的测点,且测点是钻杆轴线中点,所以,ΔLi是由B点和C点的切线(图2(b)中BI和CI)组成的折线线段。B点和C点对应的方位角和倾角为ψi、ψi+1和θi、θi+1,由此得出坐标计算公式:
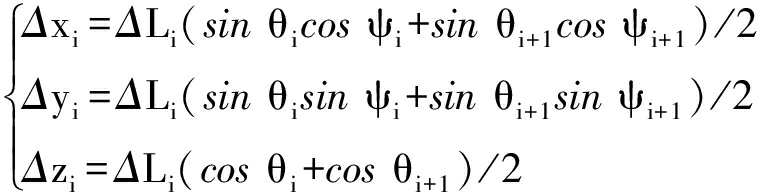
(1)
三维坐标推算公式见式(2)。如果定义钻孔孔口位置为地理坐标系O点,这样就可逐点推算各点坐标。
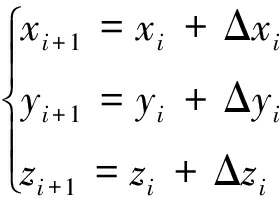
(2)
方位角ψ、倾角θ可由钻杆载具坐标系(XYZ坐标系,简称b系)相对于n系进行空间旋转获得。工程上可通过测量b系下地球的矢量场,即地球重力场和地磁场,来确定这2个夹角。具体是沿b系安装一个三轴加速度计和一个三轴磁强计,然后对b系下的矢量场和已知的n系下的矢量场进行比较,就可获得空间姿态三要素[8],即方位角ψ、倾角θ、工具面角φ。对应于三轴矢量传感器[9-10],b系下的加速度计输出为(GX,GY,GZ),磁强计输出为(MX,MY,MZ),则可解算得到倾角θ、工具面角φ和方位角ψ[10]
tanθ=-![]()
(3)
tanφ=![]()
(4)
tanψ=![]()
(5)
通过在钻具平台上安装一个三轴加速度计和一个三轴磁强计即可构成一个捷联式磁导航单元。该单元在测量过程中必须满足以下2个条件:① 系统平台处于静止或者匀速状态; ② 测量环境没有其他磁干扰设备。
2.1 离线式数据同步方法原理
普通中小型回转钻机的钻进距离一般在200 m以内,且钻头通过钻机液压系统驱动。由于煤层的阻隔[11]和钻杆的自旋,在线式通信方案不适用于普通中小型回转钻机[12]。
针对上述问题,本文根据普通中小型回转钻机的工作特点,提出了一种离线式数据同步方法。该方法要求在打钻过程中,孔口同步仪和孔底探管分别基于实时时间对钻杆数据和钻孔测点姿态数据进行采集,其中钻孔测点数据按等时间间隔的方式采集,钻杆数据由工人按钻杆序号进行按键采集,即打入一根钻杆采集一次钻杆数据。打钻完成后导出钻孔测点姿态数据,然后以采集钻杆数据的实时时间为索引对钻孔数据进行有效点筛选,最后通过筛选出的有效点进行轨迹绘制。
同步仪是一种由司钻操作、用于采集钻杆数据的装置。打钻过程中,每加装一根钻杆,由司钻按键采集一次数据,数据格式见表1(g为重力加速度,g=9.8 m/s2),表1记录了钻孔编号、打入的钻杆编号及采集钻杆数据的实时时间。探管是一种镶嵌在无磁钻杆中并随钻头一起钻进,用于采集钻孔测点的数据的姿态测量单元,其核心部件即一个三轴加速度计和一个三轴磁强计。打钻过程中,每隔12 s自动采集一次数据,数据格式见表2,表2记录了2个三轴传感器的输出值及采集时间。打钻完成后,要将探管中的数据导入同步仪,然后由同步仪以钻杆数据的采集时间的±6 s为筛选条件对探管数据进行筛选,最后将探管的有效数据点(表2中加底色的数据)与表1中钻杆数据进行组合,表3中的数据即为最终可绘制轨迹的有效点。通常为了工程需求,同步仪也集成轨迹绘制功能,方便井下直接显示轨迹。轨迹绘制可根据式(1)-式(5)实施,先由式(3)-式(5)计算得到有效点的姿态,然后再根据式(1)、式(2)计算出各有效点的相对坐标,最后用三次样条插值法进行插值,并连接这些有效点,即可得到一条平滑的、近似实际钻孔轨迹的测量钻孔轨迹。
表1 同步仪采集的数据格式
Table 1 The format of the collected data by synchronizer

2.2 离线式数据同步方法应用
基于以上离线式数据同步方法,本文开发出一套离线式随钻测斜系统,主要由探管、同步仪、上位机软件组成,其数据通信关系如图3所示。系统主要采用RS232和USB方式通信,而且该通信是发生在打钻完成后,即退出钻杆,取出探管,然后用电缆连接同步仪和探管才能进行通信,所以称作离线式数据同步方法。
探管主要用于钻孔轨迹测点姿态数据采集和存储,主要采集的数据为地球重力矢量和地磁场矢量在探管载具三轴的分量,并基于实时时间存储,打钻完成后可通过RS232接口将数据上传到同步仪。探管系统框图如图4所示。
表2 探管采集的数据格式
Table 2 The format of the collected data by the measurement unit
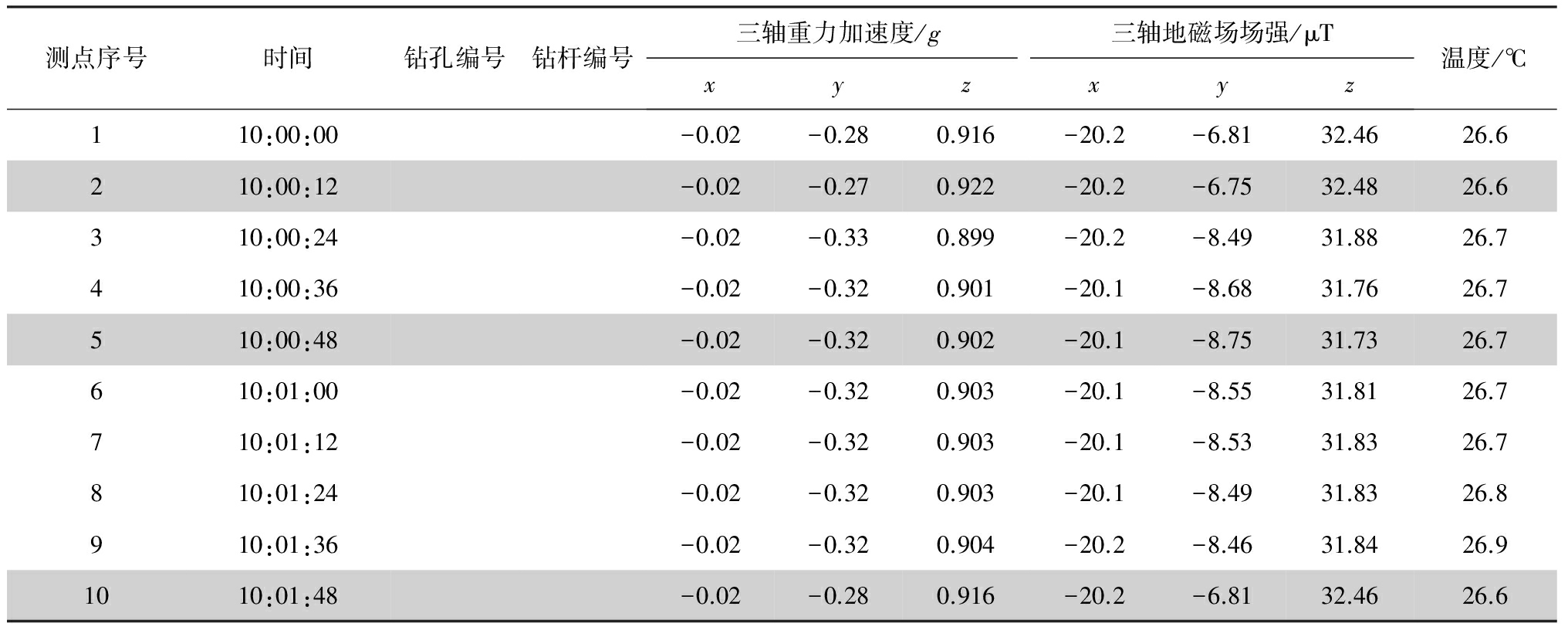
表3 有效点数据格式
Table 3 The data format of the effective measuring points

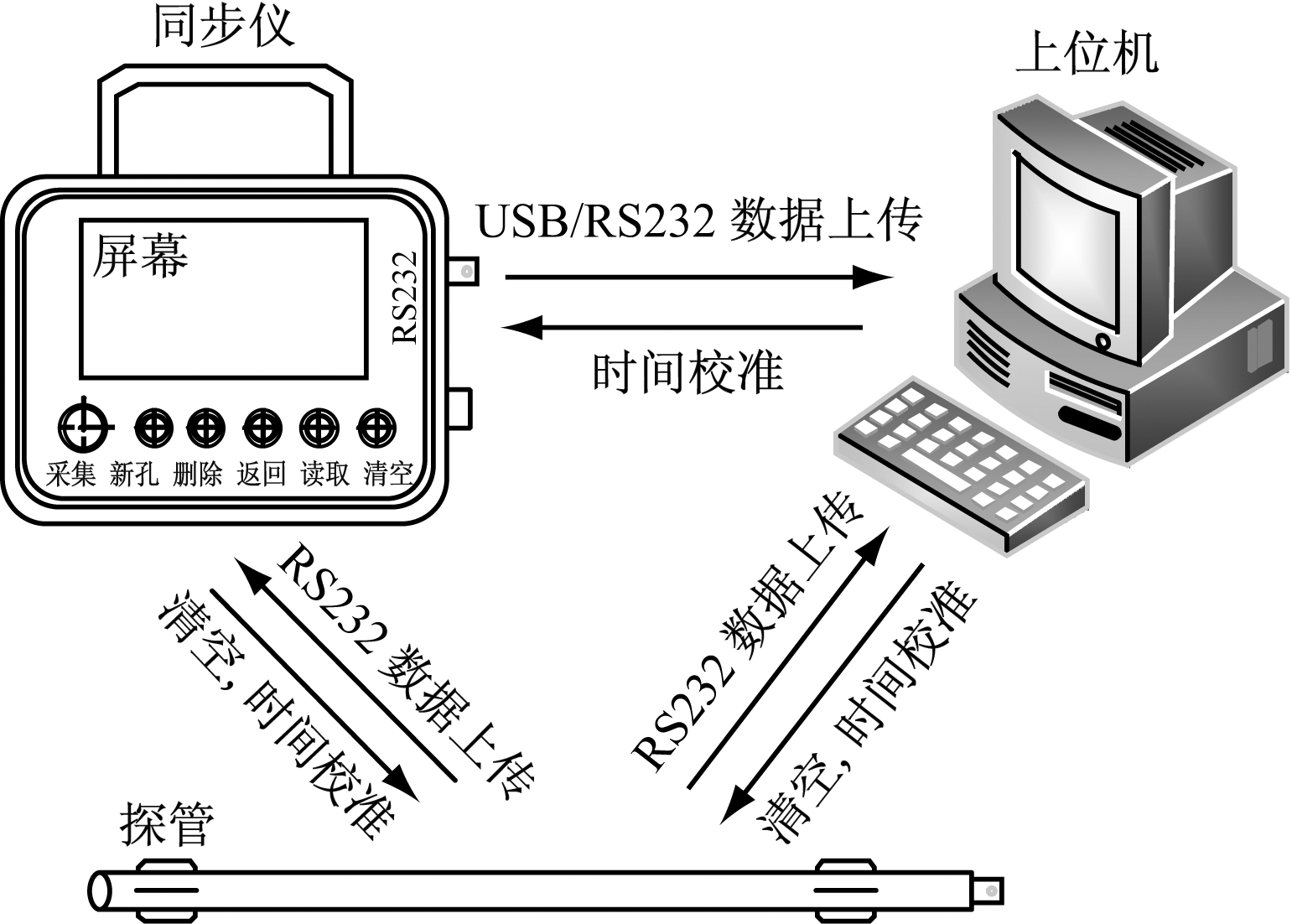
图3 随钻测斜系统数据通信关系
Fig.3 The data communication relation of measuring while drilling system
同步仪主要用于钻杆数据采集、读取探管数据并进行有效数据点筛选、轨迹绘制、存储并上传钻孔轨迹数据等。同步仪系统框图如图5所示,通过按键1—6来实现钻孔编号采集、钻杆编号采集、探管数据上传和有效点筛选,而且有效点数据可暂时存储到同步仪存储器。然后可通过按键7将有效点轨迹曲线显示到屏幕上。打钻作业结束后可通过USB接口或RS232接口上传到上位机软件供备案或者用于地面数据分析。

图4 探管系统框图
Fig.4 The system diagram of measurement unit
上位机软件主要用于辅助同步仪和探管工作,比如实时时间校准、数据上传、单个钻孔数据表制作及采煤工作面所有钻孔轨迹分析等。
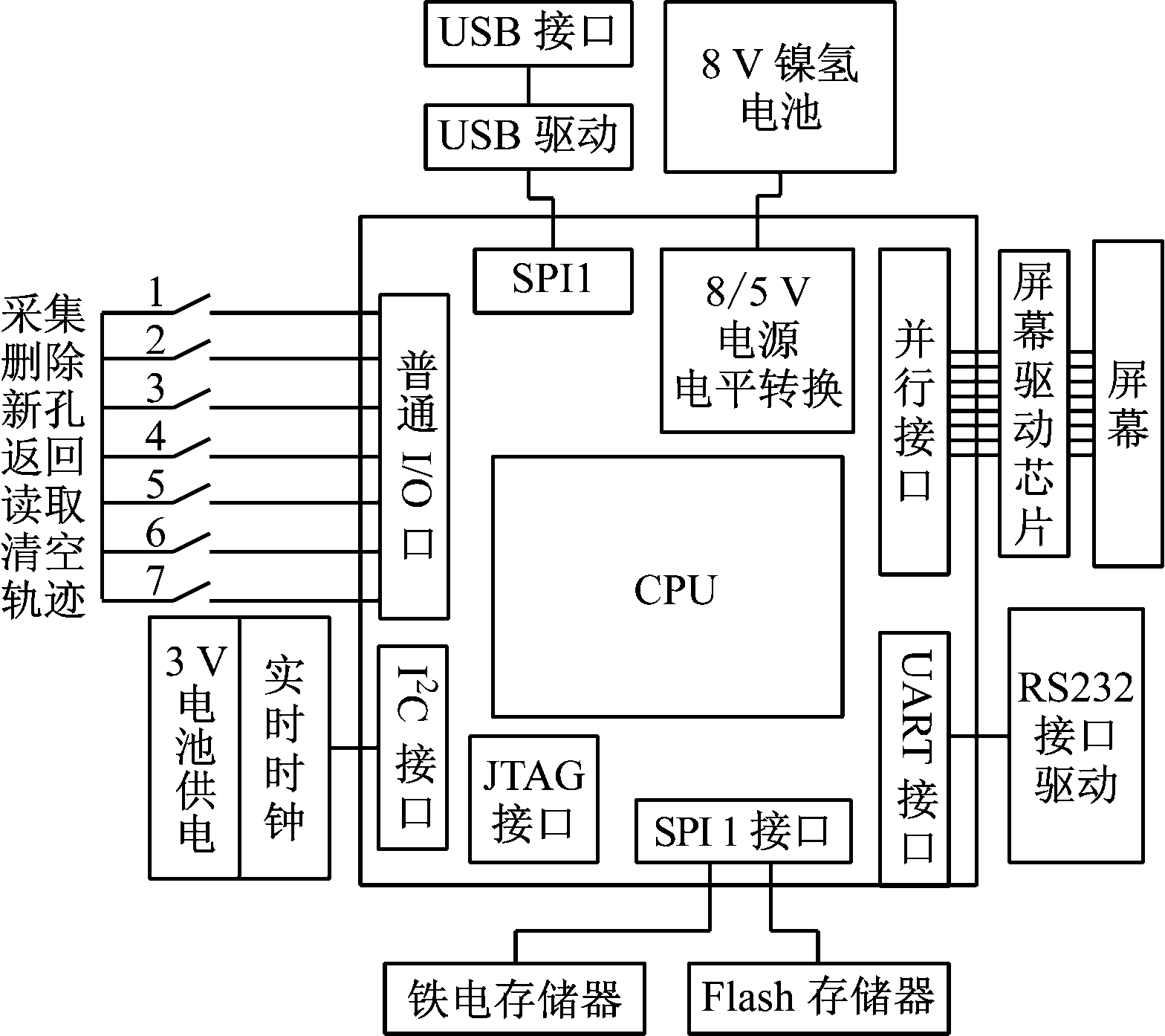
图5 同步仪系统框图
Fig.5 The system diagram of synchronizer
试验目的在于检验离线式数据同步方法应用于普通中小型回转钻机的可行性。通过自主研发的随钻测斜系统分别进行地面试验和井下试验,然后检验其所绘制的轨迹与设定轨迹的走势是否相同。
3.1 试验对象
试验用随钻测斜系统实物如图6所示,其中探管是由内部安装三轴姿态传感器及其辅助电路的铍铜管构成,安装在钻头后第2节无磁钻杆中,用于测量重力加速度矢量和地磁场矢量在钻杆坐标下的分量。同步仪由不锈钢外壳包装的本安电路构成,用于采集钻杆数据和绘制轨迹。
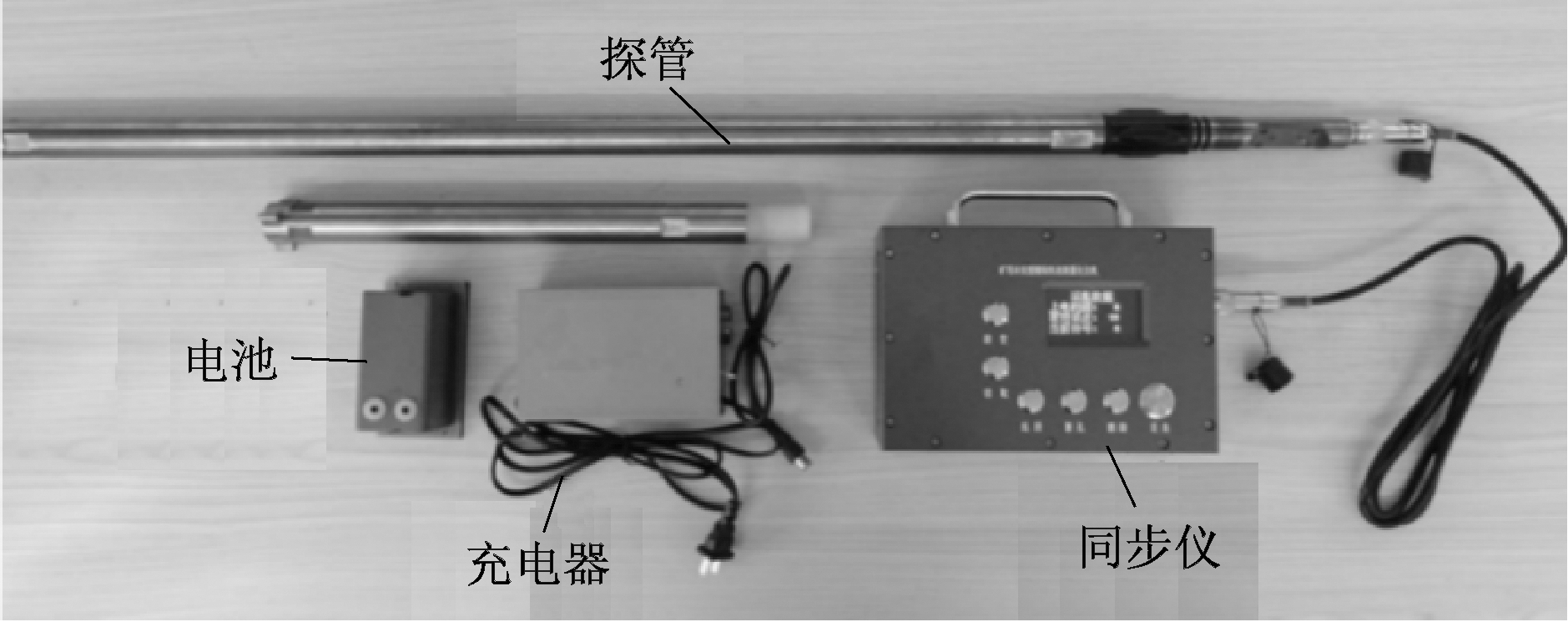
图6 随钻测斜系统实物
Fig.6 The product picture of the measuring while drilling system
3.2 地面测试
首先采用地面测试模拟煤矿井下钻孔流程进行验证。试验地点选在空旷、远离铁磁材料的地方。预先随机划定一条方位角为189.5°、倾角为0°、长度为100 m的地面曲线来模拟矿井下实际钻孔轨迹。由于是地面曲线,所以,其上下偏差为0。沿地面设定曲线移动探管,并且每隔1 m暂停并稳定放置一次,暂停间隔为24 s,期间按下同步仪采集按钮
模拟钻杆数据采集。移动完成后,将探管数据导入同步仪进行有效测点选择,然后再按下轨迹按钮进行轨迹绘制并显示,最后将轨迹数据导入上位机与设定轨迹进行比较。该方法采用左右偏差轨迹图和上下偏差轨迹图来说明轨迹走向[13],轨迹的左右偏差及上下偏差如图7所示。由图7可知,测量轨迹与设定轨迹趋势基本相同,但是存在轨迹偏差。经研究,轨迹偏差主要由加速度传感器和磁阻传感器本身及其安装误差所导致,如传感器的零偏误差、灵敏度误差、非正交误差及未对准误差等[14-15],另外传感器零漂和灵敏度还受温度影响,因此,传感器误差校正成为轨迹能否精确绘制的关键,并成为下一阶段工作的主要环节。
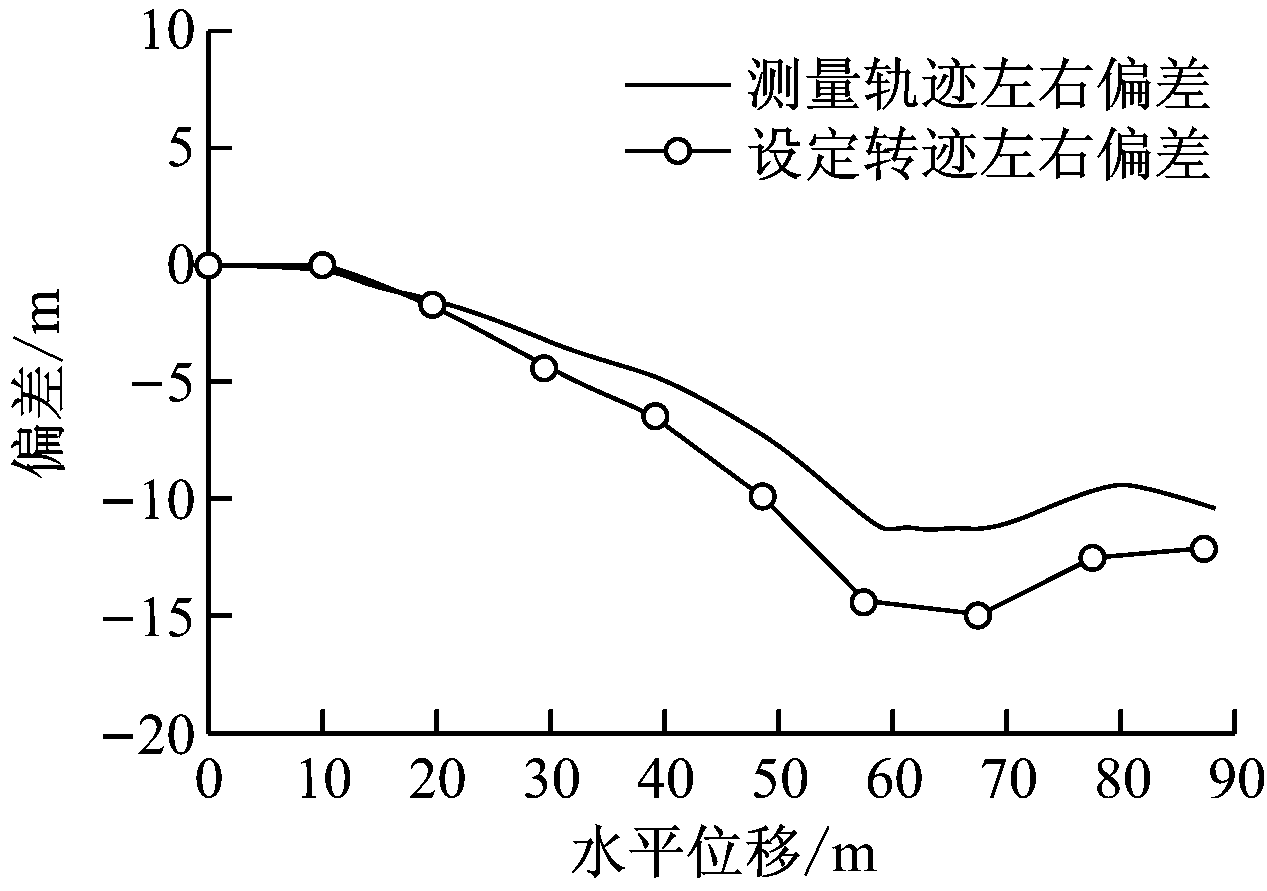
(a) 轨迹的左右偏差(左偏为正/右偏为负)
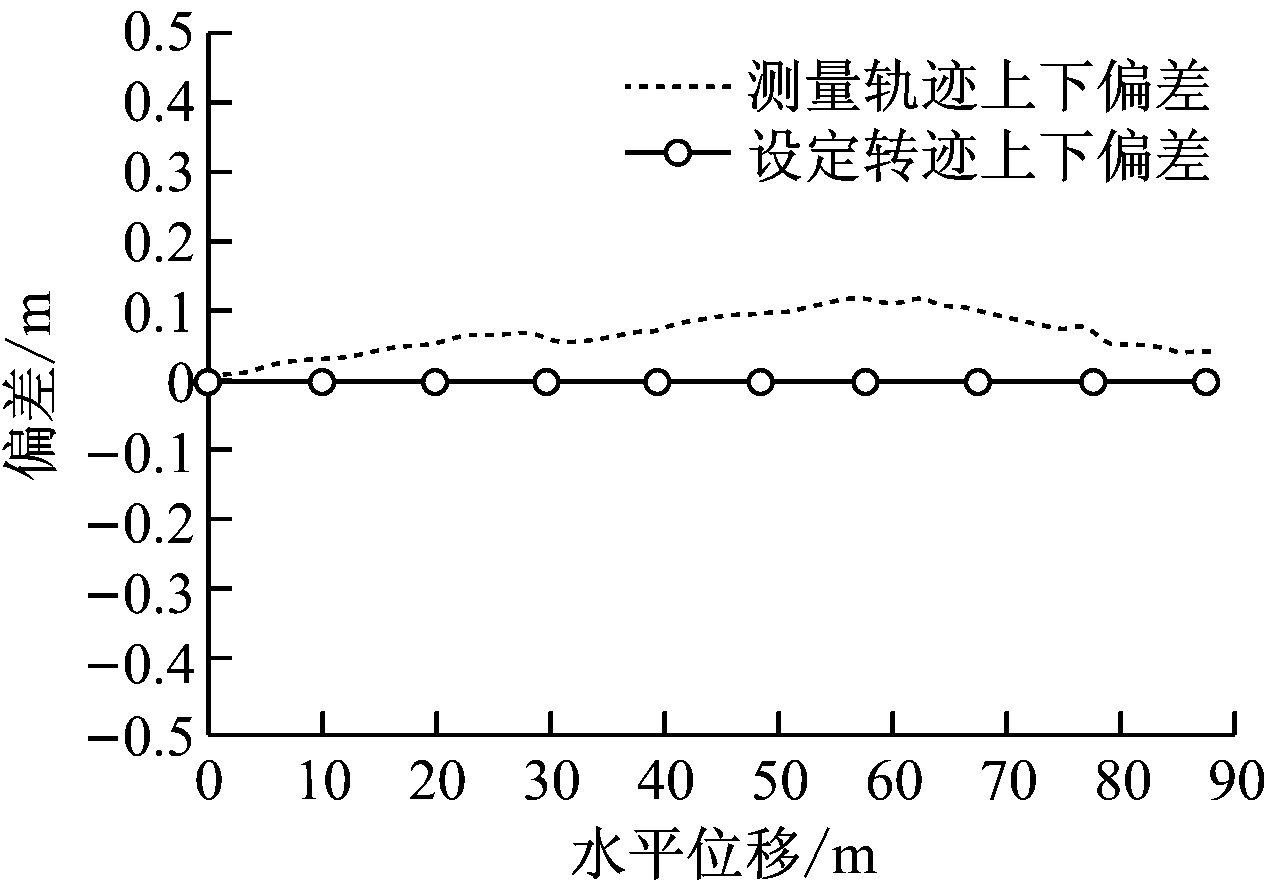
(b) 轨迹的上下偏差(上偏为正/下偏为负)
图7 轨迹的左右偏差及上下偏差
Fig.7 The left-right deviation and up-down deviation of trajectory
3.3 煤矿井下测试
在某矿二号井进行测试,试验的钻孔位于西回风大巷23号巷道和22号巷道之间的煤壁上导线点往东26 m处,用作敷设水管。该孔孔长为48 m,设计方位角为0°,倾角为22°,初始孔深为1 m,钻杆长度为2 m。根据现场测得的23个有效点绘制钻孔轨迹,如图8所示。测试结果显示,基于离线式数据同步方法的离线式随钻测斜系统在煤矿钻井条件下能够稳定运行,并能够很好地配合普通中小型回转钻机使用。
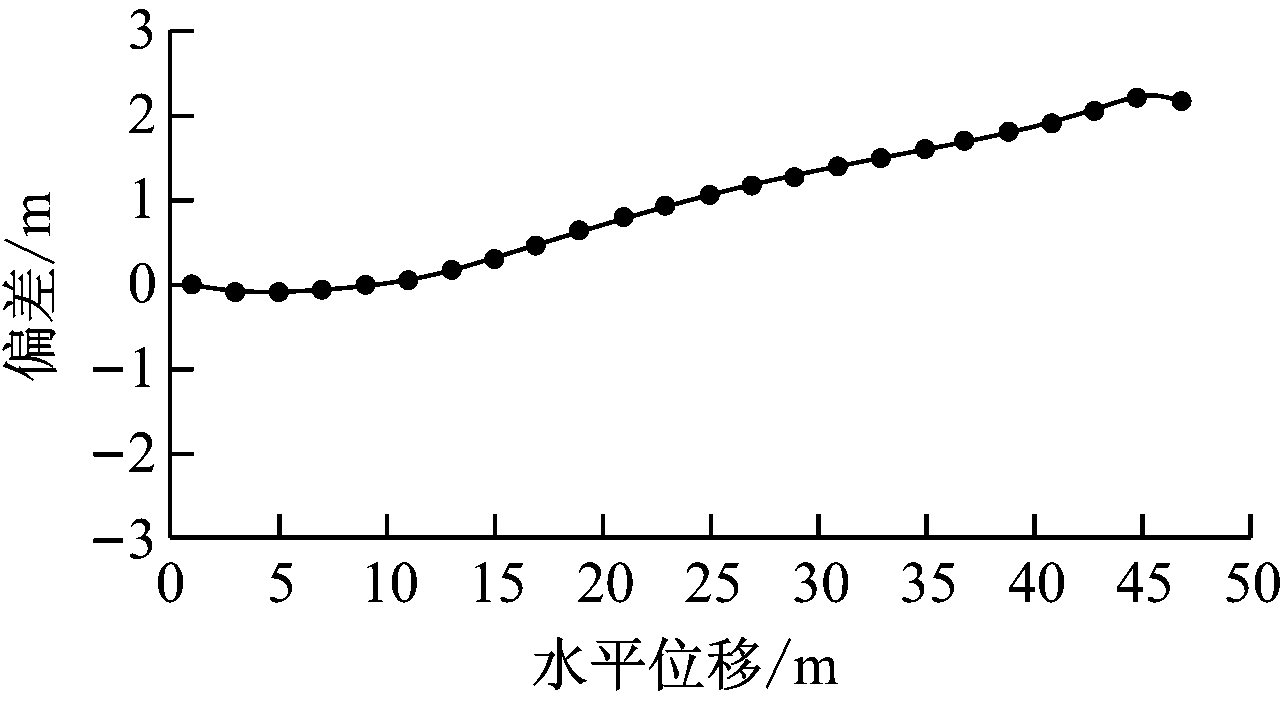
(a) 左右偏差曲线(左偏为正/右偏为负)
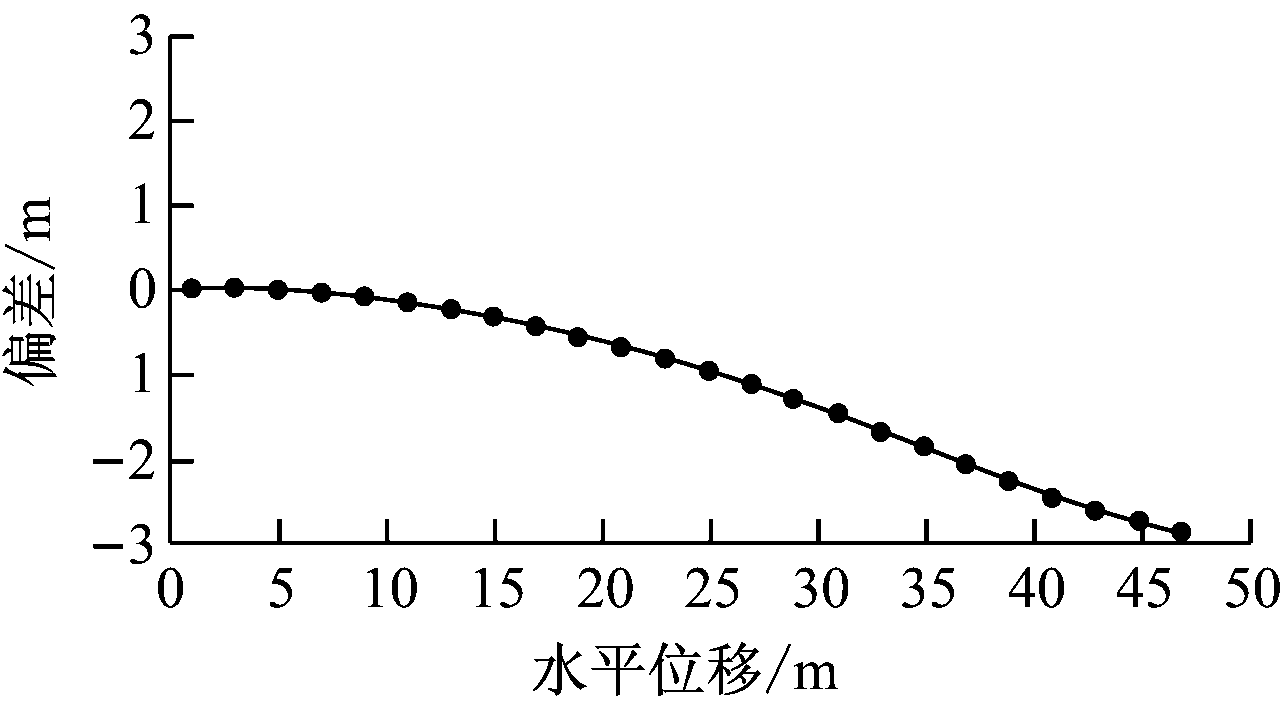
(b) 上下偏差曲线(上偏为正/下偏为负)
图8 某矿二号井测试轨迹
Fig.8 The test trajectory of No.2 well in a coal mine
基于随钻测斜原理,结合煤矿用普通中小型回转钻机的特点,提出了一种适用于中小型回转钻机的离线式数据同步方法。该方法以实时时间为索引,使钻杆数据和姿态数据实现了同步,同时解决了中心穿缆式通信方式和无线通信方式不适用于回转钻机的问题,为普通中小型回转钻机增加了钻孔轨迹绘制功能,从而为煤矿探放水、管路敷设、煤层勘探提供了依据。
参考文献(References):
[1] 石智军, 李泉新, 许超. 煤矿井下随钻测量定向钻进技术及应用 [J].地质装备, 2012,14(6):32-36.
SHI Zhijun, LI Quanxin, XU Chao. Application of MWD directional drilling technology in coal mine [J]. Equipment for Geotechnical Engineering,2012,14(6):32-36.
[2] 石智军, 温榕, 方俊,等. 煤层井下定向钻进用随钻测量系统的研制 [J]. 煤炭科学技术, 2013,41(3):16-21.
SHI Zhijun, WEN Rong, FANG Jun, et al. Research and development on drilling measuring system of directional drilling in underground mine [J]. Coal Science and Technology, 2013,41(3):16-21.
[3] 张涛, 鄢泰宁, 卢春华. 无线随钻测量系统的工作原理与应用现状[J].西部探矿工程,2005,105(2):126-128.
ZHANG Tao, YAN Taining, LU Chunhua. Working principle and application status of wireless MWD system [J].West China Exploration Engineering, 2005,105(2):126-128.
[4] 鲁琴, 罗武胜, 徐涛. 水平定向钻进跟踪与导向仪中地下传感发射探头的设计[J].电子技术应用, 2004, 30(5):10-12.
LU Qin, LUO Wusheng, XU Tao. Design of underground sensor transmitter in horizontal directional drilling tracking and guiding instrument[J].Application of Electronic Technique,2004,30(5):10-12.
[5] 侯胜明, 王以法, 管志川,等.基于超声波的近钻头无线随钻测斜系统设计[J].石油机械,2010,38(10): 1-3.
HOU Shengming, WANG Yifa, GUAN Zhichuan, et al. Design of an ultrasonic wave-based near-bit wireless MWD system [J]. China Petroleum Machinery, 2010,38(10):1-3.
[6] 徐莉莉, 夏克文, 朱军. 测井学[M]. 北京:石油工业出版社,1998.
[7] 周丽弦, 崔中兴.无陀螺钻井测量技术研究 [J]. 中国惯性技术学报, 2000,8(2):54-57.
ZHOU Lixian, CUI Zhongxing. Well-drilling surveying technique without gyro [J]. Journal of Chinese Inertial Technology, 2000,8(2):54-57.
[8] 徐涛, 罗武胜, 吕海宝,等. 地下定向钻进姿态测量系统的设计 [J]. 中国惯性技术学报, 2004,12(2):5-8.
XU Tao, LUO Wusheng, LYU Haibao,et al. Attitude determination system for underground directional drilling [J]. Journal of Chinese Inertial Technology, 2004,12(2):5-8.
[9] XU Tao, LUO Wusheng, LYU Haibao, et al. Design of underground sonde of a directional drilling locator system [J]. Sensors & Actuators A: Physical, 2005,119(2):427-432.
[10] XUE Qilong, WANG Ruihe, SUN Feng, et al. Continuous measurement-while-drilling utilizing strap-down multi-model surveying system [J]. IEEE Transactions on Instrumentation & Measurement, 2014,63(3):650-657.
[11] 熊皓, 胡斌杰.随钻测量电磁传输信道研究[J].地球物理学报,1997,40(3):431-441.
XIONG Hao, HU Binjie. Investigation of the EM channel characteristics for MWD[J]. Chinese Journal of Geophysics, 1997,40(3):431-441.
[12] 方俊, 石智军, 李泉新,等. 新型煤矿井下定向钻进用有线随钻测量装置 [J].工矿自动化,2015,41(8):1-5.
FANG Jun, SHI Zhijun, LI Quanxin, et al. Novel cable measurement while drilling device used for directional drilling in coal mine [J]. Industry and Mine Automation, 2015,41(8):1-5.
[13] 黄麟森, 张先韬. 回转钻进随钻测量装置数据处理软件设计[J]. 工矿自动化,2015,41(7):112-114.
HUANG Linsen, ZHANG Xiantao. Design of data processing software of measurement device while drilling for rotary drilling [J]. Industry and Mine Automation, 2015,41(7):112-114.
[14] 徐涛, 温东, 孙晓磊. 基于加速度计和磁强计的方位测量与校正技术研究[J].仪器仪表学报,2009,30(10):2018-2022.
XU Tao, WEN Dong, SUN Xiaolei. Research on azimuth measurement and correction technique with accelerometer and magnetometer[J]. Chinese Journal of Scientific Instrument, 2009,30(10):2018-2022.
[15] 苏毅, 刘阳, 李晓琨,等. 基于加速度计和磁强计的随钻姿态测量观测模型 [J].传感器与微系统,2013, 32(2):20-23.
SU Yi, LIU Yang, LI Xiaokun, et al. Observation model of attitude determination while directional drilling based on accelerometers and magnetometers[J]. Transducer and Microsystem Technologies, 2013, 32(2):20-23.
Research on off-line data synchronization method of measuring while drilling system
LIU Zongwei, SONG Jiancheng
(Shanxi Key Laboratory of Coal Mining Equipment and Safety Control, Taiyuan University of Technology, Taiyuan 030024, China)
Abstract:An off-line data synchronization method was proposed to solve the problem that attitude data of measuring while drilling system of an ordinary medium or small rotary drilling rig cannot be uploaded on-line. In the method, hole synchronizer and exploring tube at bottom of the hole are used to collect real-time drill-pipe data and attitude data of the borehole respectively during drilling process; after drilling, the synchronizer reads all the attitude data from the exploring tube, and then selects the effective measuring points to drawing trajectory by linking these selected points. Test results show that the off-line data synchronization method realizes synchronization of borehole data and attitude data, can fully meet demands of measurement while drilling of the ordinary medium or small rotary drilling rig without any change of structure of the drilling rig.
Key words:rotary drilling rig; measurement while drilling; off-line data synchronization; borehole trajectory
收稿日期:2016-11-30;
修回日期:2017-03-27;责任编辑:张强。
基金项目:国家自然科学基金项目(U1510112);山西省研究生联合培养基地人才培养项目(2016JD17)。
作者简介:刘宗伟(1984-),男,山西忻州人,博士研究生,研究方向为智能电气技术,E-mail:liuzongwei1984@163.com。
引用格式:刘宗伟,宋建成.随钻测斜系统离线式数据同步方法研究[J].工矿自动化,2017,43(9):59-65. LIU Zongwei,SONG Jiancheng. Research on off-line data synchronization method of measuring while drilling system[J].Industry and Mine Automation,2017,43(9):59-65.
文章编号:1671-251X(2017)09-0059-07
DOI:10.13272/j.issn.1671-251x.2017.09.011
中图分类号:TD63
文献标志码:A 网络出版时间:2017-08-28 11:26
网络出版地址:http://kns.cnki.net/kcms/detail/32.1627.TP.20170828.1126.011.html