
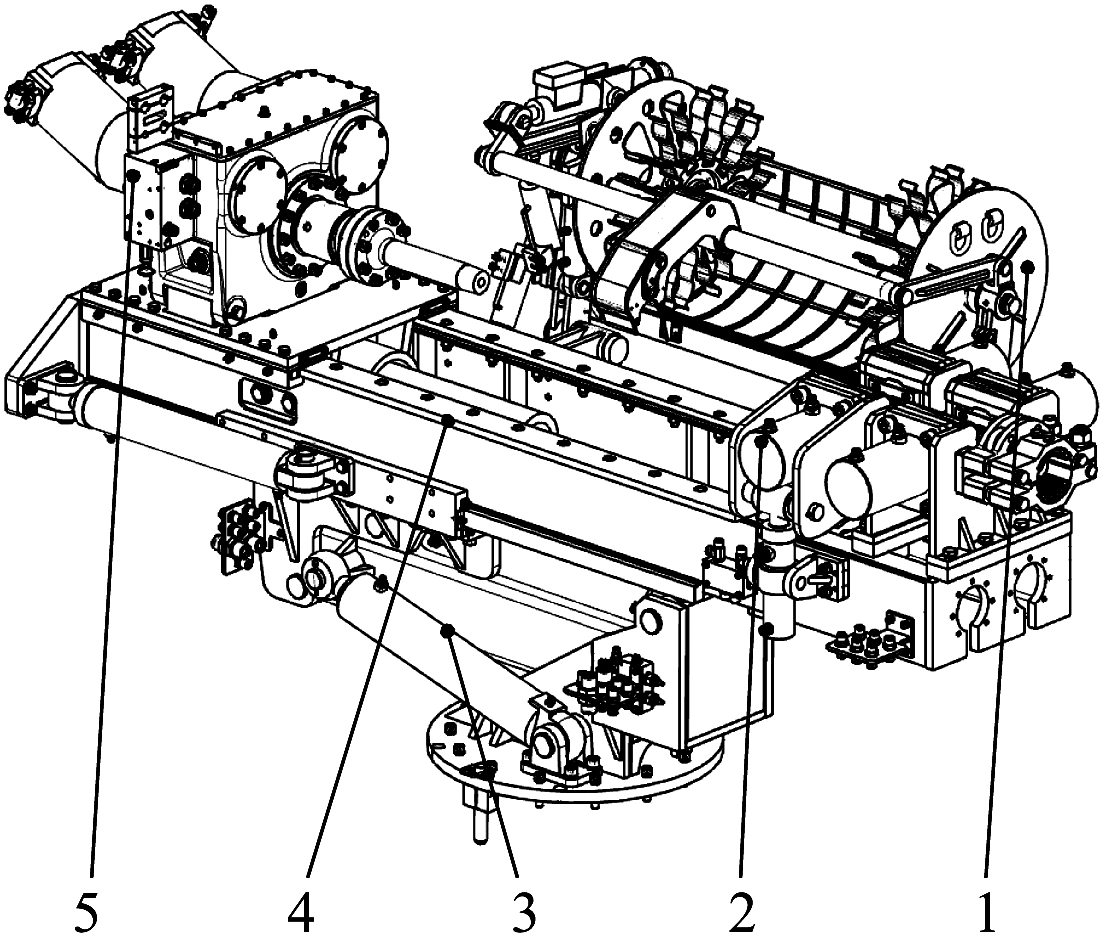
1-夹持手; 2-转轮式杆仓; 3-二级摆动臂;4-驱动限位装置; 5-一级摆动臂
图1 换杆装置结构
Fig.1 Structure of drilling pipe replacing device
李晓鹏, 乔杰, 姚亚峰
(中煤科工集团西安研究院有限公司, 陕西 西安 710077)
摘要:针对目前煤矿坑道钻探施工中因孔位较高、开孔角度大而造成的装卸钻杆操作困难和存在安全隐患的问题,设计了矿用钻机换杆装置及其控制系统。钻机换杆装置与钻机动力头的主动钻杆、夹持器配合动作,用中间加(卸)杆的方式实现钻杆的装卸。控制系统以矿用本质安全兼隔爆型液压控制器为核心,通过脉宽调制(PWM)信号和开关信号分别驱动控制比例电磁阀和换向电磁阀,从而调节油缸的伸缩速度;通过磁致位移传感器将比例电磁阀驱动的油缸伸缩长度信号反馈给控制器,形成油缸伸缩位置闭环控制。试验结果表明,矿用钻机换杆装置能够匹配现有型号钻机,满足大高度或大角度的侧帮钻探施工中的自动装卸钻杆的需求,提高了钻探施工效率和换杆操作的安全性。
关键词:煤炭开采; 钻机; 换杆装置; 电液控制; 自动装卸
针对本煤层瓦斯抽采的煤矿坑道钻探施工大多在工作面巷道中进行侧帮钻孔施工,往往需要跨输送带作业。针对邻近煤层瓦斯抽采的钻孔则需要进行大仰角穿层钻孔施工。这些工况要求煤矿坑道钻机在狭小的空间中进行大幅度调角变幅,以满足对钻孔施工高度和角度的要求[1]。因此,近些年出现了各种能够进行大范围变幅的煤矿坑道钻机。但是,这样的工况给钻进过程中装卸钻杆带来了很大的工作强度:进行换杆操作时需要人工搬运钻杆,往往需要2人以上进行配合,并需要登高操作,且存在砸伤人或设备的安全隐患[2-3]。针对该问题,本文设计了一种矿用钻机换杆装置控制系统,换杆装置能够遥控操作,辅助完成钻杆装卸作业,大大减轻了装卸钻杆作业的工作强度,提高了操作的安全性和工作效率。
为便于与现有ZDY系列矿用坑道钻机相互配套,设计了如图1所示的换杆装置。换杆装置由机械臂组件和杆仓组件2个部分组成。其中,机械臂组件由一级摆动臂、二级摆动臂和夹持手及其驱动油缸构成,通过两级摆动臂的运动,机械臂可以到达装卸钻杆时所需要的相应位置,夹持手用于抓取钻杆。杆仓组件由转轮式杆仓和驱动限位装置组成,转轮式杆仓通过弹性夹簧把钻杆固定储存在杆仓内,驱动限位装置利用驱动油缸和限位油缸实现杆仓的分度式旋转和定位。
1-夹持手; 2-转轮式杆仓; 3-二级摆动臂;4-驱动限位装置; 5-一级摆动臂
图1 换杆装置结构
Fig.1 Structure of drilling pipe replacing device
整个换杆装置通过安装座安装于钻机导轨的侧面,如图2所示。其可以随钻机的机身进行同步变幅运动,从而可以适应目前广泛应用的工作面巷道内跨输送带高位瓦斯孔施工和大角度穿层钻孔施工。钻机动力头的主动钻杆、钻机夹持器与换杆装置配合动作,用中间加卸杆的方式实现钻杆的装卸。换杆装置可根据配套钻机的单次钻进行程配套不同长度的钻杆。
1-换杆装置; 2-钻机夹持器; 3-变幅装置; 4-导轨; 5-动力头
图2 换杆装置安装
Fig.2 Instructions of drilling pipe replacing device
换杆装置与钻机要相互配合完成钻杆的装卸,同时不能干扰正常的钻进作业,因此,换杆装置要有不同的工作状态和工作位置[4-9]。换杆装置的工作状态有运输状态、装卸钻杆状态和等待状态。
夹持手的位置如图3所示。位置1为运输状态时的夹持手位置,在该位置时,整个装置回收为最紧凑的状态,便于钻机运输;当钻机开始钻进后,整个装置展开,开始准备工作。位置2 为钻机正常钻进、夹持手处于等待状态时的工作位置,此时机械臂扬起,不会阻碍动力头在钻机导轨上的正常运动。位置3为夹持手从杆仓内取(装)钻杆时的工作位置,钻杆在杆仓内分为2层排放,因此,位置3a为取(装)外层钻杆时的夹持手位置,位置3b为取(装)内层钻杆时的夹持手位置。位置4为夹持手把钻杆送到(取离)动力头中心时的工作位置。
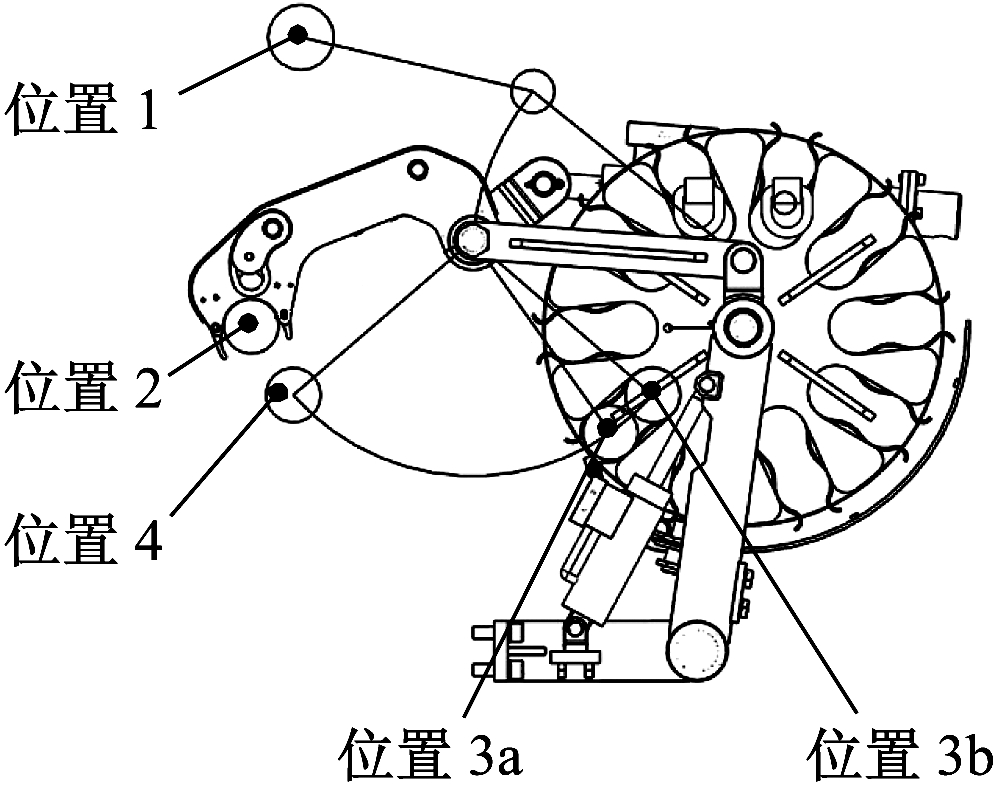
图3 夹持手的工作位置
Fig.3 Working position of the holding hand
换杆装置要利用不同的传感器检测钻机动力头的位置和钻机夹持器的动作,从而自动识别钻机的工作状态,提高整个装置操作的自动化程度和动作的安全性。利用若干个位置开关可以实现如下功能:① 判断杆仓位置,从而确定钻机是否为运输状态。② 判断钻机动力头是否在安全位置,动力头与机械手是否保持安全距离。③ 判断夹持手的取(装)钻杆位置在杆仓的内层还是外层。④ 判断钻机是处于下钻状态还是提钻状态,从而确定装置需要加装钻杆还是卸去钻杆。利用压力传感器检测钻机夹持器是否动作,并夹住钻杆,实现夹持手与钻机夹持器的钻杆传递。
3.1 硬件结构
目前,智能控制器在工程机械的电液控制系统中逐渐得到推广应用。这种控制器相对于过去的可编程逻辑控制器(PLC),具有更加强大的计算能力,可以进行智能控制计算;具有更加强大的驱动能力,不需要继电器的配合,就可以直接输出大电流去控制电磁阀;具有更加紧凑的结构和丰富的硬件接口。本文利用某公司的智能控制器进行隔爆设计,并进行电气隔离保护设计,开发了矿用本质安全兼隔爆型液压控制器。该控制器集成度比PLC高,适应性更强,并且功耗也比较低,可以应用于井下绝大部分设备的电液控制[10-11]。本文以该控制器为核心,设计了换杆装置控制系统,其结构如图4所示。
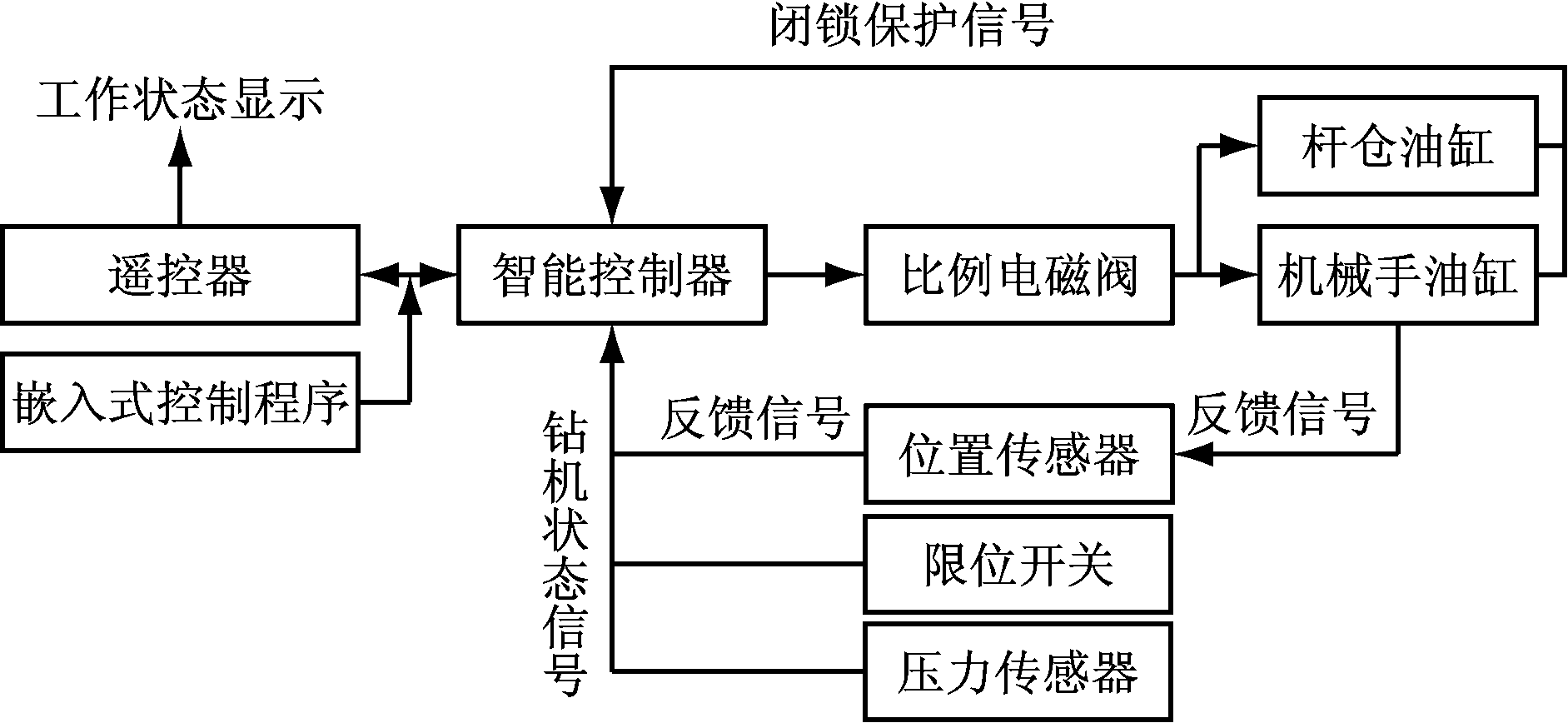
图4 换杆装置控制系统结构
Fig.4 Structure of control system of drilling pipe replacing device
换杆装置由5组油缸和相对应的电磁阀进行驱动,其中包括1组带位置反馈油缸和比例电磁阀,4组伸缩油缸和换向电磁阀。控制系统以智能控制器为核心,直接输出PWM信号和开关信号,分别驱动控制比例电磁阀和换向电磁阀。PWM信号可以通过控制输出电流的大小去控制比例电磁阀的开合程度,从而调节油缸的伸缩速度。磁致位移传感器将比例电磁阀驱动的油缸伸缩长度信号反馈给控制器,形成油缸伸缩位置闭环控制。
用于监测钻机工作状态的传感器(如接近开关和压力传感器等)通过控制器的模拟量输入端口将钻机的工作状态信息反馈给控制器,控制器通过这些信息进行逻辑计算,判断钻机工作状态。
控制器通过CAN总线与遥控器进行双向通信,将遥控器的操作指令发给控制器,将工作状态或故障信息发送给遥控器,通过遥控器的显示屏展现给操作人员。
3.2 软件流程
控制系统软件利用CodeSys V3 PLC软件编程平台开发,该平台的程序编辑器和调试器的功能是建立在高级编程语言的基础上,功能强大,开发便捷。设计控制程序时,应考虑到不同的钻机工作状态对应着不同的动作,各种状态存在动作互锁的关系,如钻机动力头动作时,换杆装置不能动作,以防止发生碰撞。另外,各种工作状态的检测也应考虑优先级的不同,以进一步提高动作的安全性。结合控制系统的硬件结构及钻探施工流程设计的控制系统软件流程如图5所示。
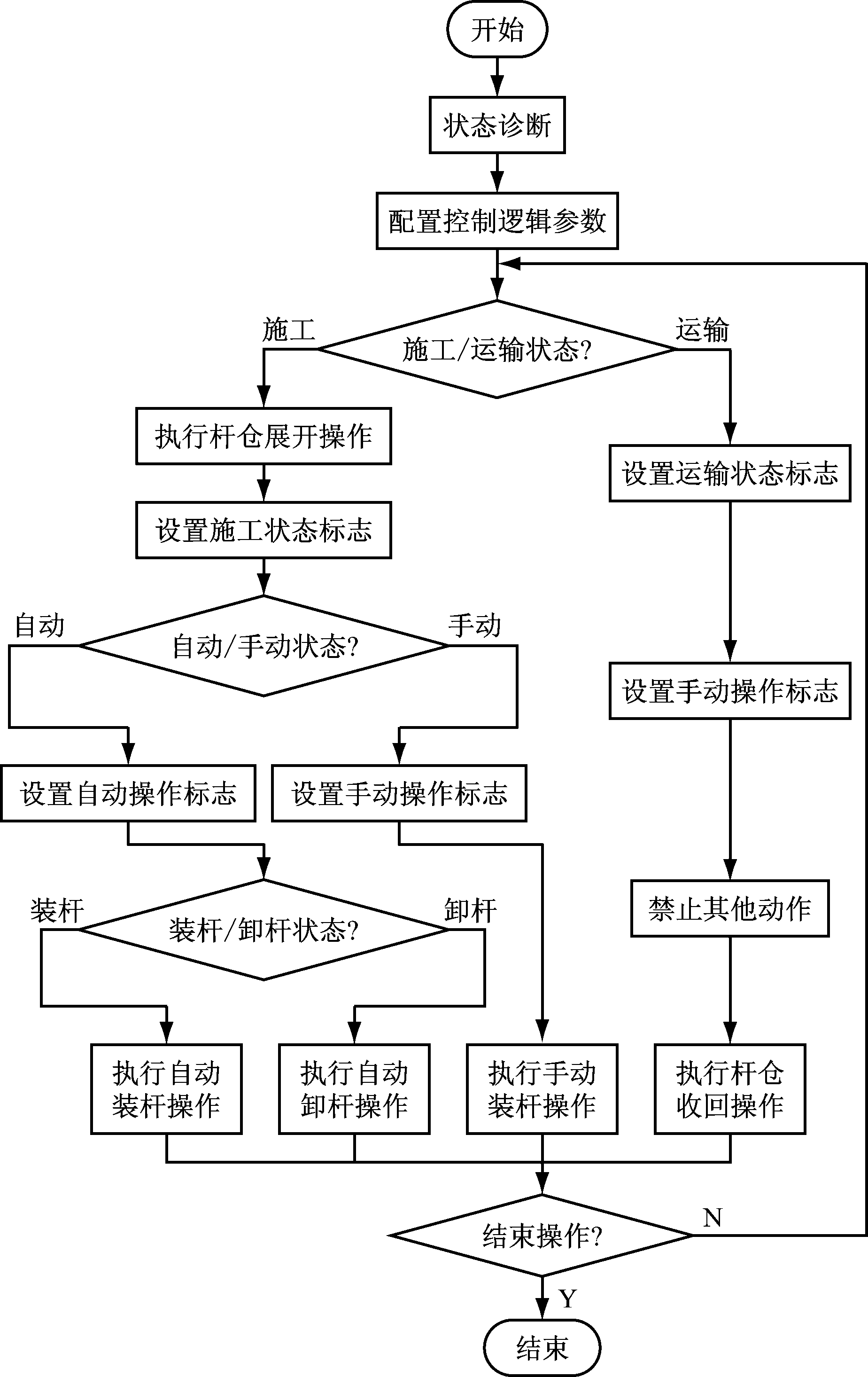
图5 控制系统软件流程
Fig.5 Software flow of control system
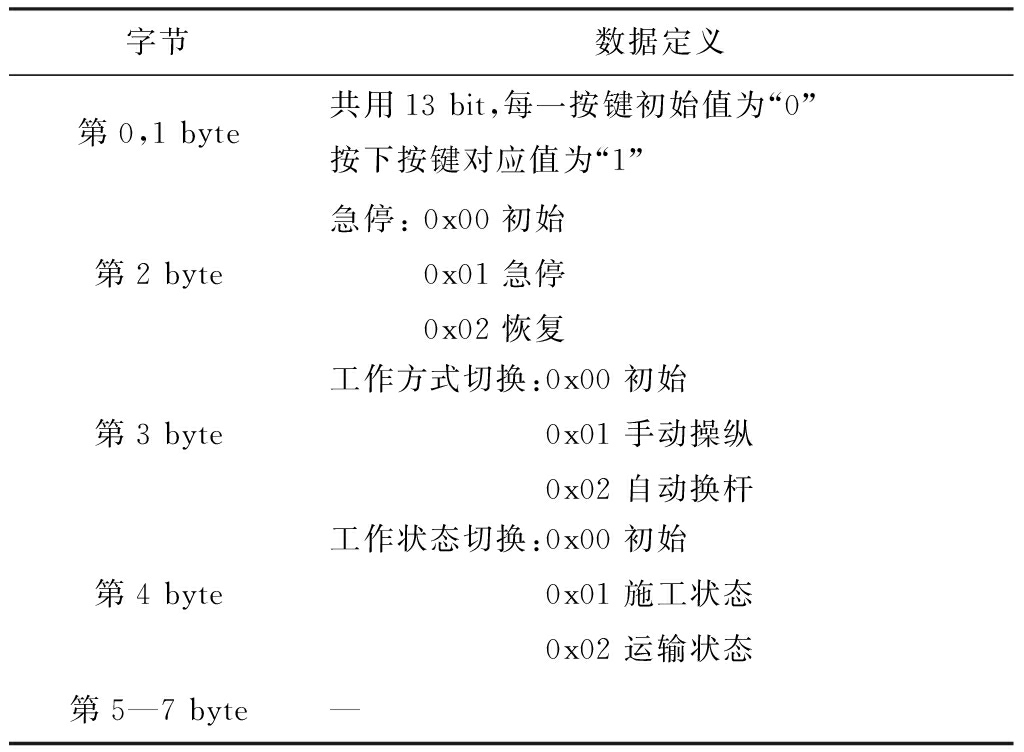
控制器与遥控器之间通过CAN总线进行双向通信,遥控器发送的操作信息CAN ID为0x181,控制器发送的状态信息CAN ID为0x182,CAN总线波特率为250 kbit/s。其中,操作信息占用CAN总线数据场8 byte中的前5 byte,根据操作逻辑和相应的按键定义,遥控器发送的操作信息报文定义见表1。其中,第0,1 byte的每一位对应着遥控器的按键,能够实现对换杆装置的运动控制。第2—4 byte对应的按键为多功能按键,可以实现多种操作状态的切换。
表1 CAN总线发送数据定义
Table 1 Definition of send data of CAN bus
遥控器具有显示功能,控制器根据检测到的工作状态,将状态信息发送到遥控器上并显示出来。状态信息占据数据场的前5 byte,其报文格式及显示的信息见表2。显示信息分为3行显示,分别为换杆机构工作状态、钻机工作状态和钻杆数量统计。系统诊断信息只有在诊断出系统异常后才以报警状态单独显示出来。CAN总线在通信过程中要对总线的通信频率(也称为对总线的心跳频率)和数据帧进行监测,诊断总线运行是否正常,提高总线的安全性和稳定性[12-14]。
换杆装置安装在ZDY4000LR型钻机上,完成室内试验和野外现场试验。室内试验现场如图6所示。通过试验,基本达到了设计目标:操作人员能够在距离钻机不超过15 m的视线范围内遥控操作钻机,并实现了连续20根钻杆的自动换杆功能,有效提高了换杆作业的安全性。在试验中钻机分别进行了15°和45°上仰角模拟钻进,换杆装置均可以正常进行换杆作业,表明该装置能够随钻机进行大角度施工作业。

图6 室内试验现场
Fig.6 Indoor test site
野外试验现场如图7所示。分别施工2个深度为20 m的钻孔,反复进行提钻和下钻动作,通过频繁装卸钻杆验证换杆装置的可靠性、操作效率和工作强度。一个操作人员利用换杆装置装钻杆平均每次需要23 s,卸钻杆平均每次需要25 s。在试验中,由于装置出现故障,排除故障耗时15 min,20 m深钻孔下钻和起钻总计需要31 min。试验中还统计出当出现杆仓空仓时,装填杆仓的人工操作时间平均为10 min,并且可以在钻进过程中进行钻杆补充,不需要停钻。作为对比,利用人工操作进行下钻和起钻,需要2人配合操作,装/卸钻杆平均每次需要94 s,20 m深钻孔下钻和起钻总计需要63 min。人工操作时,由于工人连续操作,工作强度较大,操作速度下降比较严重,下钻操作时间需要20 min,但起钻操作时间需要40 min。

图7 野外试验现场
Fig.7 Field test site
矿用钻机换杆装置实现了基于CAN总线的遥控自动装卸钻杆功能,目前已经应用于ZDY4000LR型钻机上。试验结果表明,该装置可以配合钻机进行大角度钻探作业,解决了操作人员换杆作业工作强度大、存在安全隐患等问题,相对于人工操作模式具有更高的操作效率。
参考文献(References):
[1] 姚亚峰,王贺剑,凡东,等.ZDY1200L型履带式全液压坑道钻机的研制[J].煤田地质与勘探,2008,36(3):75-78.
YAO Yafeng,WANG Hejian,FAN Dong,et al.Development of the ZDY1200L track-mounted hydraulic tunnel drilling rig[J].Coal Geology & Exploration,2008,36(3):75-78.
[2] 田宏亮.瓦斯抽采履带式坑道钻机的研制与应用[J].煤田地质与勘探,2008,36(5):77-80.
TIAN Hongliang.Manufacture and application on track-mounted rig for gas drainage[J].Coal Geology & Exploration,2008,36(5):77-80.
[3] 邬迪,姚克,陈亮.跨输送带履带钻机研制与应用[J].煤炭科学技术,2014,42(7):81-83.
WU Di,YAO Ke,CHEN Liang.Application and development of track-mounted drilling rig with acrossing transportation belt[J].Coal Science and Technology,2014,42(7):81-83.
[4] 花蓉.非开挖导向钻机中几种主要结构的设计[J].探矿工程(岩土钻掘工程),2009,36(8):11-14.
HUA Rong.Design of main structures for trenchless oriented drilling machine[J].Exploration Engineering(Rock & Soil Drilling and Tunneling),2009,36(8):11-14.
[5] 陈小平.煤矿用自动控制钻机钻杆箱的研制[J].矿山机械,2016,44(7):19-23.
CHEN Xiaoping.Development of drill rod box of automatic control drill used in colliery[J].Mining & Processing Equipment,2016,44(7):19-23.
[6] 孙友宏,沙永柏,于萍.JFK-15型非开挖导向钻机夹持-拧卸机构[J].工程机械,2006,37(11):12-15.
SUN Youhong,SHA Yongbai,YU Ping.Clamping mechanism on model JFK-15 trenchless directional drill[J].Construction Machinery and Equipment,2006,37(11):12-15.
[7] 陈晨,张明柱,郭蕊.液压钻车钻杆自动装卸装置的设计[J].矿山机械,2014,42(4):18-20.
CHEN Chen,ZHANG Mingzhu,GUO Rui.Design of automatic drill pipe mounting and dismounting device in hydraulic drill rig[J].Mining & Processing Equipment,2014,42(4):18-20.
[8] 曹静,姚宁平,姚亚峰,等.煤矿坑道瓦斯抽采钻机变幅机构的设计及力学分析[J].煤矿机械,2013,34(5):120-122.
CAO Jing,YAO Ningping,YAO Yafeng,et al.Design and force analysis of luffing mechanism coal tunnel gas drainage rig[J].Coal Mine Machinery,2013,34(5):120-122.
[9] 贾大伟,蒋顺东,程志强,等.多功能钻机换杆机构的研究与设计[J].建筑机械,2014(9):104-106.
JIA Dawei,JIANG Shundong,CHENG Zhiqiang,et al.Research and analysis of changing pipe mechanism of multi-function drillingrig[J].Construction Machinery,2014(9):104-106.
[10] 豆龙,闫杰,李东明.潜孔钻机智能换杆机械手控制浅析[J].采矿技术,2012,12(6):51-53.
[11] 梁长乐.多功能钻机自动换杆机构的精准控制研究[D].秦皇岛:燕山大学,2012.
[12] 姚立权,刘永刚,侯志军,等.基于CAN总线的刨煤机控制系统设计[J].工矿自动化,2012,38(1):100-102.
YAO Liquan,LIU Yonggang,HOU Zhijun,et al.Design of control system of plough based on CAN bus[J].Industry and Mine Automation,2012,38(1):100-102.
[13] 赵良,翁寅生,田宏亮.车载钻机CAN总线数据记录仪设计[J].电子设计工程,2015,23(5):55-57.
ZHAO Liang,WENG Yinsheng,TIAN Hongliang.Design of truck-mounted drilling rig CAN-bus data recorder[J].Electronic Design Engineering,2015,23(5):55-57.
[14] 和国磊,刘晓林,朱芝同,等.基于CAN总线技术的钻机电控系统的设计与应用[J].探矿工程(岩土钻掘工程),2016,43(12):72-77.
HE Guolei,LIU Xiaolin,ZHU Zhitong,et al.Design and application of electronic control system of rig based on CAN bus technology[J].Exploration Engineering (Rock & Soil Drilling and Tunneling),2016,43(12):72-77.
Design of mine-used drilling pipe replacing device and its control system
LI Xiaopeng, QIAO Jie, YAO Yafeng
(CCTEG Xi'an Research Institute, Xi'an 710077, China)
Abstract:In view of problems of difficulties and security risks in operation of loading and unloading of drilling pipe caused by high hole position and large hole opening angle in current coal mine tunnel drilling construction, a mine-used drilling pipe replacing device and its control system were designed. The drilling pipe replacing device is used with active drilling pipe of power head of drilling rig and the hold, to achieve loading and unloading of drilling pipe in the middle. The control system takes mine intrinsically safe and flameproof hydraulic controller as the core, and drives control proportional solenoid valve and commutation solenoid valve by PWM signal and switching signal respectively, so as to adjust the expansion and contraction speed of the cylinder. The cylinder telescopic length signal driven by proportional solenoid valve is fed back to controller by magnetostrictive sensor to form closed-loop control of the cylinder telescopic position. The test results show that the mine-used drilling pipe replacing device for drilling rig can match the existing type of drilling rig, and meet the needs of automatic loading and unloading of drilling pipe in the large-height or large-angle sidetrack drilling construction, thus improves the drilling construction efficiency and the safety of the drilling pipe replacing operation.
Key words:coal mining; drilling rig; drilling pipe replacing device; electro-hydraulic control; automatic loading and unloading
receive d:总线接收数据格式Table 2 Definition of
receive d:ata of CAN bus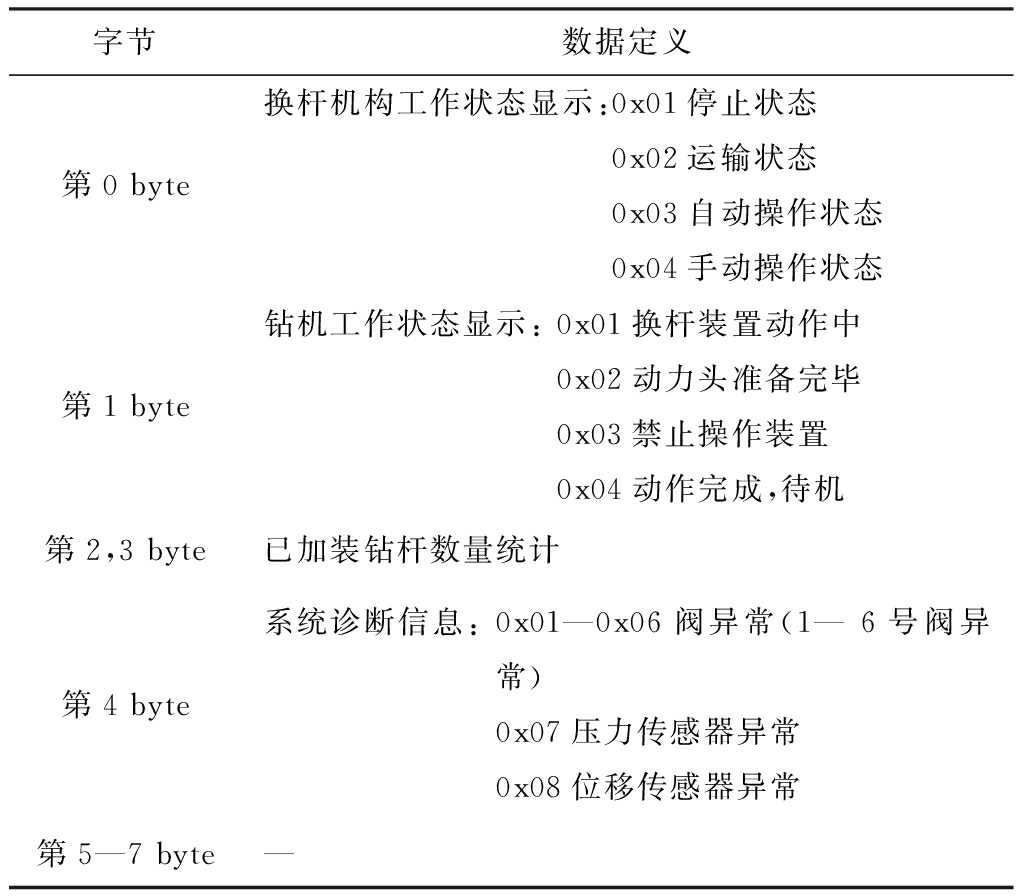
收稿日期:2017-03-03;
修回日期:2017-06-23;责任编辑:胡娴。
基金项目:国家科技重大专项项目(2016ZX05045003-002);国家自然科学基金面上项目(51275061);中煤科工集团西安研究院有限公司科技创新项目(2015XAYMS22)。
作者简介:李晓鹏(1980-),男,黑龙江大庆人,助理研究员,主要研究方向为煤矿钻探设备、智能控制技术、矿用机电液一体化技术等,E-mail:lixiaopeng@cctegxian.com。
引用格式:李晓鹏,乔杰,姚亚峰.矿用钻机换杆装置及其控制系统设计[J].工矿自动化,2017,43(8):6-10. LI Xiaopeng, QIAO Jie, YAO Yafeng. Design of mine-used drilling pipe replacing device and its control system[J].Industry and Mine Automation,2017,43(8):6-10.
文章编号:1671-251X(2017)08-0006-05
DOI:10.13272/j.issn.1671-251x.2017.08.002
中图分类号:TD421.25
文献标志码:A 网络出版时间:2017-07-27 09:22
网络出版地址:http://kns.cnki.net/kcms/detail/32.1627.TP.20170727.0922.002.html