图1 掘进机导航问题的数学描述
Fig.1 The mathematical description of the problem of roadheader navigation
综述
田原1,2
(1.中国煤炭科工集团太原研究院有限公司, 山西 太原 030006;2.山西天地煤机装备有限公司, 山西 太原 030006)
摘要:阐述了悬臂式掘进机导航定位问题,并分析了其特殊性,给出了其数学描述;详细分析了掘进机光电导航和位姿检测技术现状、掘进机惯性导航技术现状、基于多信息融合的掘进机导航定位技术现状,并进行了比较与评价。得出结论:光电导航装备技术成熟、精度高,但在煤矿井下应用存在较严重的环境适应性问题;惯性导航技术环境适应性强、姿态检测精度较高,但长时定位精度差;将光电导航技术和惯性导航技术相结合的多信息多传感器融合的导航技术可能是解决悬臂式掘进机空间位姿检测问题的较优途径,实现信息融合的关键在于解决多信息多传感器带来的测量基准统一问题,且需要鲁棒性更强的融合算法。
关键词:悬臂式掘进机; 导航定位; 空间位姿; 惯性导航; 光电导航
为实现掘进工作面安全高效作业,掘进机自动化、无人化是一个重要的发展方向,而掘进机自动导航定位技术是实现掘进机自动化、无人化的关键技术。近十余年来,国内相关企业和科研机构一直致力于掘进机自动导航定位技术的研究,但由于相关技术基础薄弱,在自动定位导航技术方面仍未有实质性突破,这一问题已经成为制约中国采掘机械实现快速、安全、高效作业的瓶颈之一。
本质上,与地面、天空、海上导航可以利用卫星辅助完成导航定位相比,作业场合在地下受限空间中的掘进机导航定位技术属于室内导航定位领域,但与一般室内导航定位技术如无线局域网(Wireless Local Area Networks, WLAN)、射频标签(Radio Frequency Identification, RFID)、Zigbee、蓝牙(Bluetooth, BT)、超宽带无线电(Ultra Wide Band, UWB)、地磁场、红外定位、光跟踪定位、机器视觉定位、超声波定位等不同,掘进机的运动方式更复杂,不确定性更高,作业环境也更恶劣。
文献[1]探讨了掘进机自动导向和定位技术,分析和比较了包括惯性导航、全站仪、电子罗盘和视觉检测等的原理和特点,得出结论:① 基于惯性导航和电子罗盘的导航技术可实现自主导航,其他方法则需要给定参考坐标系。② 以倾角仪作为俯仰角和横滚角检测传感器的装备技术更适合于水平巷道导向。③ 不同导向技术采用了不同的参照系,以巷道指向激光为参照系的方法更易于与煤矿现有导航方式相结合。
文献[2]估计了采用惯性导航技术、超宽带测量技术、iGPS测量技术和空间交会测量技术进行掘进机位姿检测的精度,得出结论:惯性导航技术实时性强,但测量精度下降较快,在无标定信号条件下持续测量精度低;超宽带测量系统组成较为简单,但测量精度容易受周围环境影响;iGPS 测量技术精度高,但需要对其进行适应性改进,以适应煤巷测量环境;空间交汇测量技术可以根据煤巷测量环境进行改进,灵活性较好,但测量系统可靠性差,技术风险大。
本文首先阐述了悬臂式掘进机导航定位问题,分析了其特殊性,给出了掘进机导航定位问题的数学描述;对近年来主流的掘进机导航定位方法按照光电原理、惯性原理和多信息融合原理进行了分类,并列出了一些有代表性的工作;对光电导航技术和惯性导航技术用于掘进机导航定位时的优缺点进行了比较说明;最后就掘进机导航定位技术的发展方向提出了看法。
悬臂式掘进机利用其悬臂回转和俯仰动作控制末端截割部进行煤岩切割,截割过程中依靠机身与巷道底板间的摩擦力与截割部所受侧向截割阻力相平衡,以保持机身相对底板静止。侧向截割阻力大于机身与巷道底板间的摩擦力时,机身就会发生侧滑和偏转,截割出的断面轮廓形状与位置就可能与设计参数不同,从而改变巷道走向。
传统掘进工艺中,由悬挂在掘进机后方巷道顶板上的激光指向仪投射出经过方向标定的激光束,在巷道断面上形成光斑,掘进机司机以这一光斑为基准进行断面测量、截割和巷道掘进,即可保证巷道走向与设计方向一致。为实现这一目标,掘进机司机需要在截割过程中多次停机测量。
截割过程中产生的大量粉尘、噪声和存在的极大安全隐患均对掘进机自动化提出了迫切的要求,其中掘进机自动导航技术成为关键技术之一[3],通过掘进机自动导航技术可实现掘进机的远程控制及掘进机断面监视和自动截割。
因为掘进机作业过程中机身存在偏转和横向侧滑、纵向打滑、俯仰、横滚等工况,而掘进机的每一个姿态和位置参数改变都会影响断面的位置和形态,从而改变巷道形态和走向,所以,需要对掘进机进行实时的、动态的三维定位和三维姿态检测。这是掘进机导航问题的特殊性之一,因为地面无人驾驶车辆的导航或室内导航仅需要进行二维定位,盾构和连续采煤机仅需要进行静态的三维姿态,采煤机仅需要三维定位。
掘进机导航问题的特殊性之二:由于掘进机通过悬臂末端的截割部截割巷道断面并控制断面轮廓的位置和精度,机身位置和姿态偏差会被放大后反映到截割部的空间位置偏差,再者,煤矿巷道尤其是主巷道使用时间一般长达数年甚至数十年,所以对巷道成型精度有较高要求。GB 50213—2010 《煤炭井巷工程质量验收规范》第7.2.5节中规定,井巷掘进坡度偏差不得超过±1‰,第7.2.6节中规定,基础掘进断面规格的允许偏差为-25~+150 mm[4]。这一偏差要求指的是最终成型偏差,包含检测偏差和执行偏差等部分。考虑到掘进机装配精度、恶劣工况等因素,通常在执行环节会产生较大偏差,因此,掘进机导航定位精度要求比一般的室内定位要求更高,掘进机定位检测精度通常要达到厘米级,姿态和航向检测精度达到角分级。
掘进机导航问题的特殊性之三:掘进机用于巷道掘进,随截割对象不同,可分为煤巷、半煤岩巷和岩巷等,掘进速度受截割对象和巷道地质条件影响,快则每天推进100 m以上,慢则每天推进3~5 m,巷道总长度短则数米、数十米,长则数百米、数千米不等,因此,相对地面车辆、船舶、飞行器等移动装备的导航特点而言,掘进机导航属于一种长时短距导航。
行业内对掘进机导航技术有多种提法,包括掘进机导航定位技术、掘进机空间位姿检测技术和掘进机定向掘进技术等。一方面,宏观来看,掘进机按照预设方向和位置开拓完成一条巷道,为了完成这条巷道,掘进机必须具备或人工或自动的导航定位能力,知道自己此时的位置和偏离预定轨迹的情况,以及下一时刻需要到达的位置,这与通常意义上的导航定位内涵吻合。另一方面,从微观来看,掘进机按照预设方向和位置开拓完成一条巷道,是通过一个个断面截割累积而成的,一条巷道的设计参数不仅有巷道的走向,还有断面轮廓形状参数和位置参数,断面截割成型不仅与掘进机的位置有关,也与掘进机的姿态有关,只有按照断面设计参数完成每一个断面的截割,才能保证最终形成的巷道符合设计要求,因此,必须对掘进机的空间位姿进行检测。本质上看,掘进机导航定位技术和掘进机位姿检测技术具有相同目标,但内涵不同,即位姿检测着眼于断面成型控制,而导航定位着眼于巷道走向控制。掘进机定向掘进技术与掘进机导航定位技术着眼点类似,都是从巷道走向控制角度提出的,定向掘进狭义上讲是为了完成一条直线型巷道,广义上讲也包含曲线型巷道,二者的含义都是按照预设方向和路径完成巷道掘进。所以,研究掘进机导航定位技术就要研究掘进机空间位置和姿态,即空间位姿检测技术,研究掘进机定向掘进技术也要研究掘进机空间位姿检测技术。
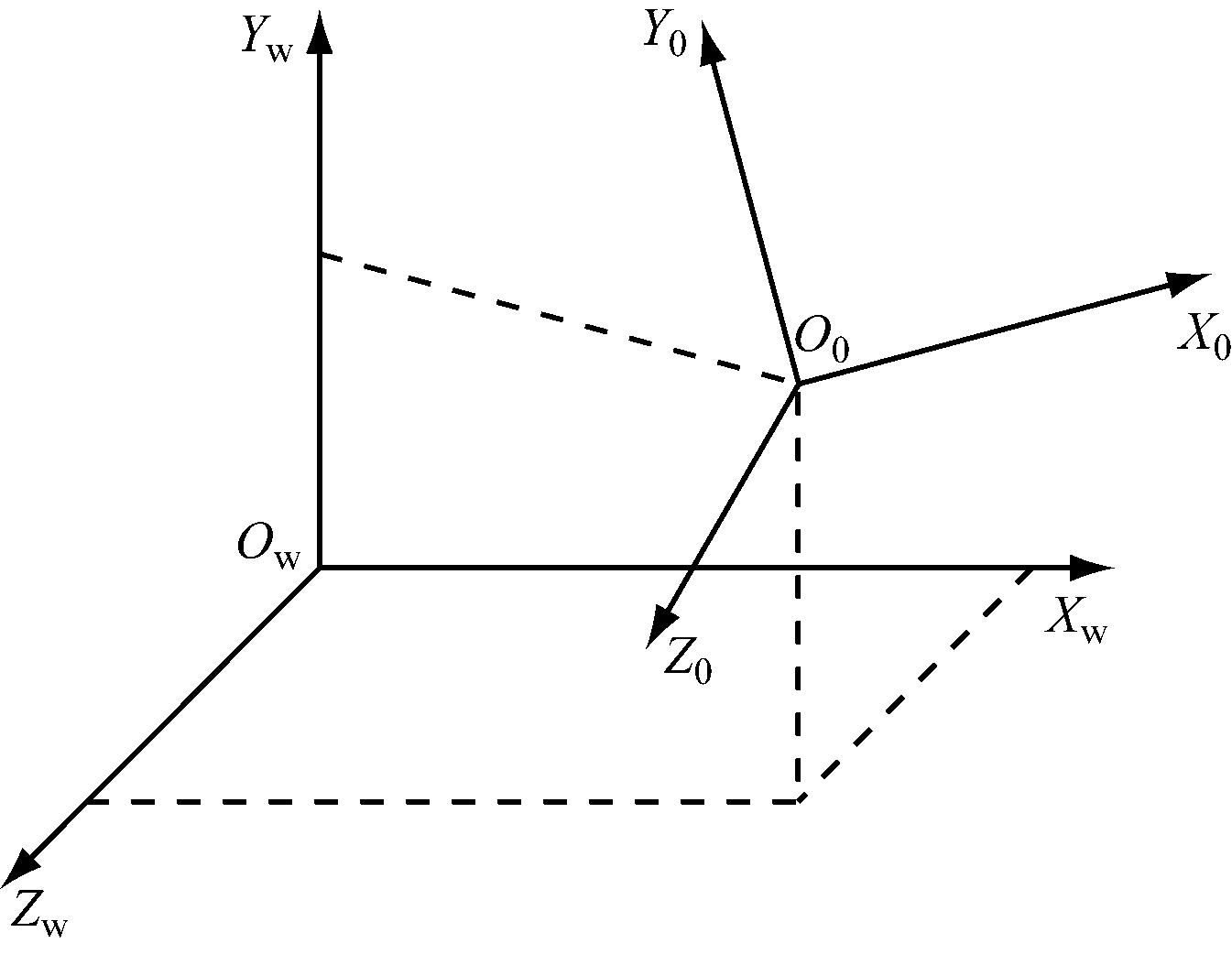
掘进机导航参数包括巷道基准坐标系中定义的机身姿态和机身位置,掘进机机身位置和姿态指的是在设计巷道中可以完整描述掘进机位置和姿态所需的参数。按照刚体运动学定义,刚体的运动具有6个运动自由度,则问题可描述如下:在以指向激光即巷道轴线为纵轴Zw,水平且垂直于巷道轴线方向为横轴Xw,二者所在平面的法线为竖轴Yw,激光出口为原点Ow的理论巷道坐标系下(图1),求解掘进机的空间位置及其前后、上下、左右轴线向量的空间姿态。为求解方便,可以在掘进机机身上建立以机身上某点为原点O0,机身前后轴线方向为纵轴Z0,左右轴线方向为横轴X0,上下轴线方向为竖轴Y0的机身坐标系。则问题可简化为求解机身坐标系在巷道坐标系下的位置和姿态[1]。
图1 掘进机导航问题的数学描述
Fig.1 The mathematical description of the problem of roadheader navigation
通过坐标转换,机身坐标系中的任一点可通过4个步骤依次转换到大地坐标系中,即绕X轴旋转,绕Y轴旋转,绕Z轴旋转,最后平移至坐标为(x,y,z)的点,这一过程可表示为

(1)
式中:R3×3表示旋转矩阵,具有单位正交特性,因此包含3个独立变量,分别是偏航角、俯仰角和横滚角;(tx,ty,tz)T表示平移矩阵,包含3个独立变量,对应3个平移量,与3个独立旋转变量一起,表示掘进机机身在巷道坐标系中的位姿参数。
掘进机导航技术从原理上可划分为3类:一类是基于光电原理的导航技术,一类是基于惯性元件的导航技术,一类是基于多信息融合的导航技术。从另一个角度看,导航技术本质上是基准传递的过程,从导航基准上可划分为2类:一类是以激光指向仪及其指向为基准的导航技术,如各种光电导航技术;另一类是以地理信息为基准的导航技术,如利用罗盘或惯性元件的导航技术。
3.1 掘进机光电导航和位姿检测技术研究现状
3.1.1 基于全站仪的掘进机位姿检测
光电原理是应用较广泛的一类导航原理,利用光信号传递基准,利用光电传感器检测光信号,如基于全站仪的掘进机位姿检测系统由固定在掘进装备后方巷道侧壁上的全站仪和全站仪后方固定的一个棱镜,以及掘进装备机身上的若干个棱镜组成,如图2所示。全站仪通过检测后方棱镜位置确定自身基准,这一基准与巷道设计基准一致,通过检测机身上若干个棱镜的空间位置计算机身的空间位置和姿态[5-6]。由于全站仪同一时间只能测一个棱镜的位置,所以无法用于动态检测。
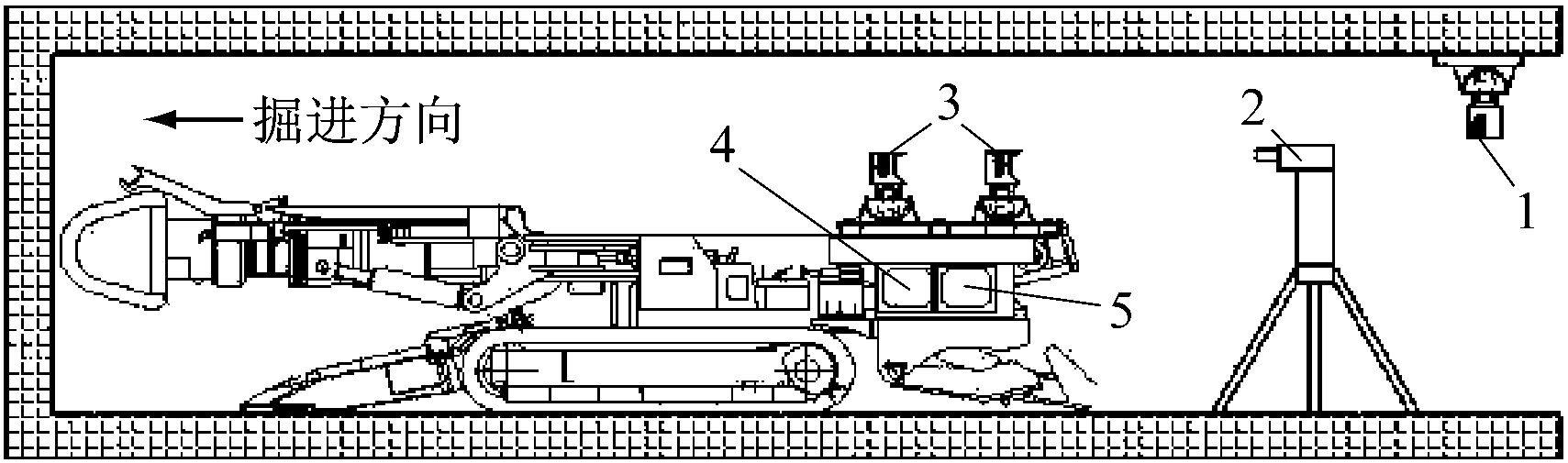
1-后视定位棱镜; 2-全站仪; 3-目标棱镜;4-工业计算机; 5-全站仪供电与通信装置
图2 基于全站仪的掘进机位姿检测系统
Fig.2 Position and pose measurement system of roadheader based on total station
3.1.2 基于线结构光的掘进机位姿检测
专利“掘进机机身位姿参数测量系统及其方法”中提出了基于结构光激光指向仪的掘进机导航定位技术[7],基于线结构光的掘进机位姿检测系统由结构光激光指向仪、两轴倾角仪、安装在机身上的2列光敏元件及数据采集处理装置组成,如图3所示。掘进机后方巷道顶板上固定的结构光激光指向仪发出的结构光投影在机身上的光敏元件上,不同位置的光敏元件输出不同信号,从而计算机身偏转角和偏移量。
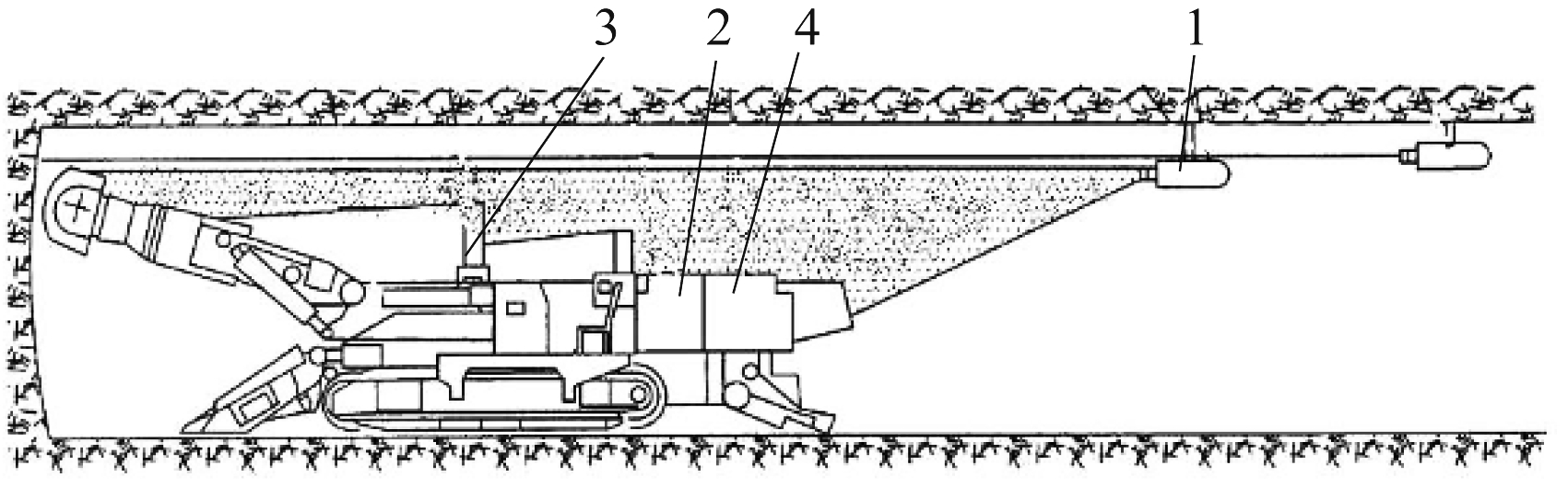
1-结构光激光指向仪; 2-两轴倾角仪; 3-光敏元件;4-数据采集处理装置
图3 基于线结构光的掘进机位姿检测系统
Fig.3 Position and pose measurement system of roadheader based on line structured light
3.1.3 基于机器视觉的掘进机空间位姿检测
基于机器视觉的掘进机空间位置检测系统由激光指向仪、摄像机、图像处理系统及光靶等组成[8]。摄像机与激光指向仪刚性连接并固定在掘进机后方巷道顶板上,光靶固定在机身上,如图4所示。摄像机采集光靶的图像,图像处理系统解算光靶空间位置和姿态,从而获得机身在指向激光基准下的空间位置和姿态。
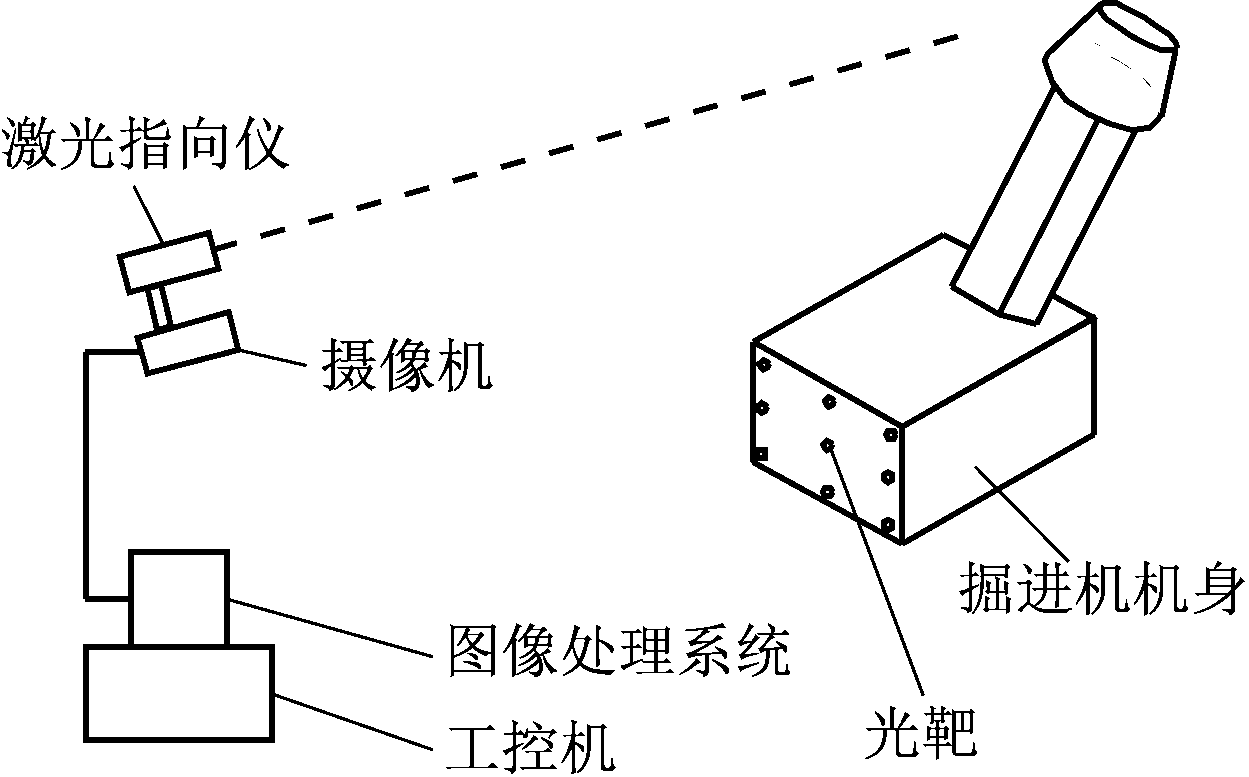
图4 基于机器视觉的掘进机空间位姿检测系统
Fig.4 Spatial position and pose measurement system of roadheader based on machine vision
3.1.4 基于双十字激光和图像处理技术的掘进机位姿检测
杜雨馨等[9]提出基于双十字激光和图像处理技术的掘进机位姿检测方法,如图5所示。以双十字激光器与激光标靶为信息来源,通过对标靶上十字光线成像特征的分析,建立了掘进机位姿空间解算模型。该方法也属于利用机器视觉技术检测掘进机空间位姿参数的一种应用,利用机身与十字激光面的空间关系,使用空间矩阵变换方法,得到机身相对于巷道的三轴倾角及在巷道断面上的偏离位移,实现了掘进机机身位姿的自动实时检测。

图5 基于双十字激光和图像处理技术的掘进机位姿检测方法
Fig.5 Position and pose measurement method of roadheader based on double cross laser and image processing technology
3.1.5 基于iGPS的掘进机单站多点分时机身位姿测量
为实现掘进机机身位姿的高精度自主测量,陶云飞等[10]提出基于iGPS的掘进机单站多点分时机身位姿测量方法,如图6所示,并对其可行性进行分析,研究了其测量误差分布规律,借用室内GPS定位技术的概念,通过旋转扇面激光检测掘进机机身上的接收器相对巷道中某一基准点之间的相对位置和角度,从而计算掘进机机身在巷道中的空间位置和姿态。多点分时检测和通过多次检测以提高检测精度的特点表明这一方法更适用于静态检测而非实时检测。
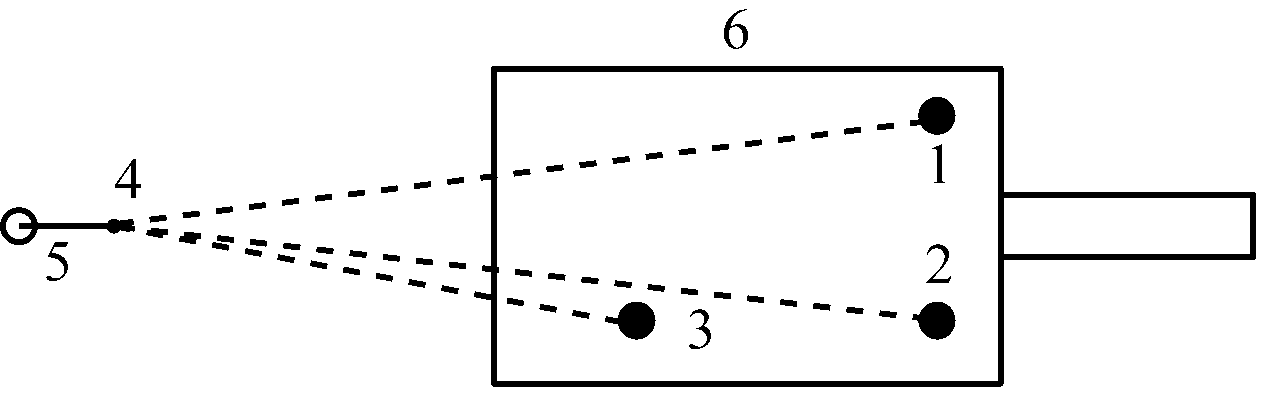
1,2,3-接收器; 4-扇面激光发射站; 5-自动旋转装置; 6-掘进机
图6 基于iGPS的掘进机单站多点分时机身位姿测量方法
Fig.6 Position and pose measurement method of single-station, multipoint and time-sharing for roadheader body based on iGPS
3.1.6 基于空间交汇测量技术的悬臂式掘进机位姿自主测量
吴淼等[11]提出了基于空间交汇测量技术的悬臂式掘进机位姿自主测量方法,如图7所示。悬臂式掘进机搭载激光发射器并发射旋转激光平面, 在其后方安装位置固定的激光接收器,并通过激光平面获取激光发射器相对于其自身的方位,从而得到悬臂式掘进机相对于由激光接收器确定的巷道坐标系的位姿状态。
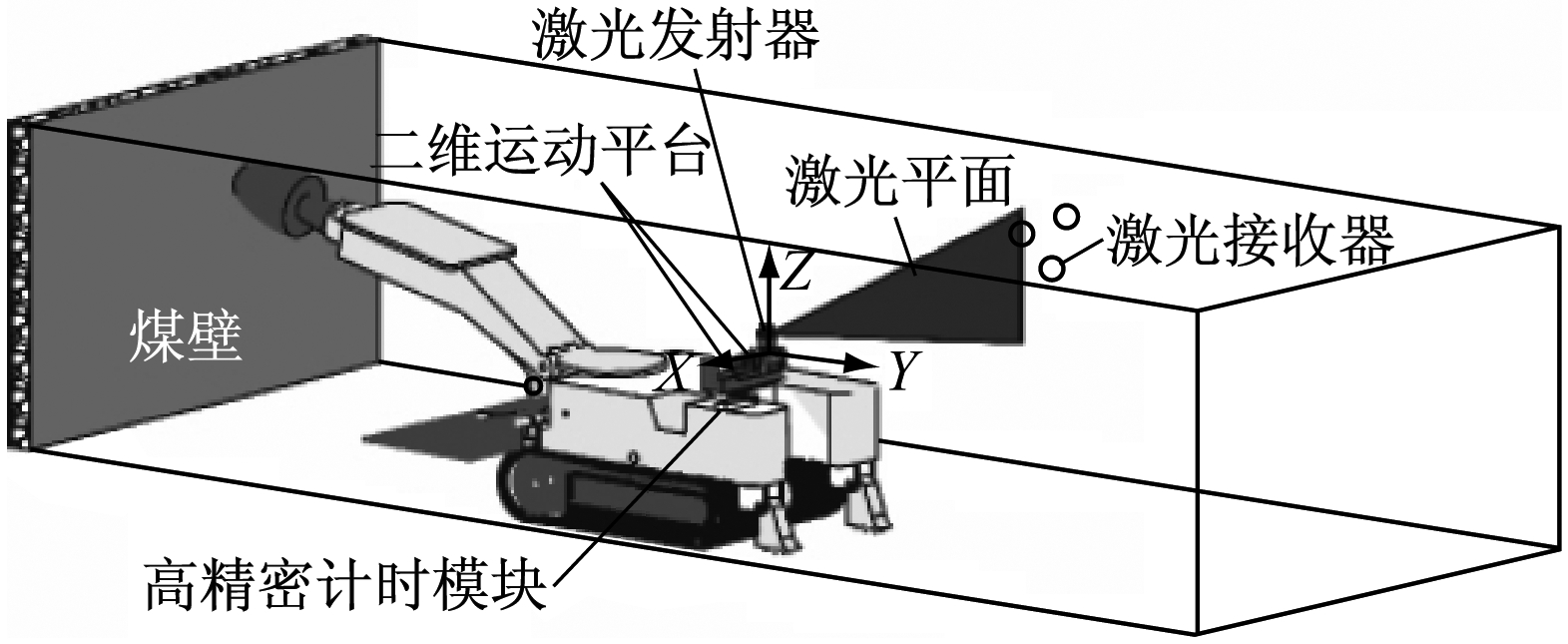
图7 基于空间交汇测量技术的悬臂式掘进机位姿自主测量方法
Fig.7 Position and pose measurement method of boom-type roadheader based on space intersection measurement technology
3.1.7 基于2个回转光靶和激光测距仪的掘进机位姿检测
齐宏亮等[12]利用2个回转激光光靶、2个激光测距仪及倾角仪建立了掘进机位姿检测系统,如图8所示。
光电导航装备技术成熟、成本低、精度高,是非煤行业常见的传感方式和导航定位技术,但在煤矿井下,存在较为严重的环境适应性问题,如低照度、低能见度、空间狭窄等均影响了光电导航技术的应用,其应用前景与除尘技术发展和应用密不可分。
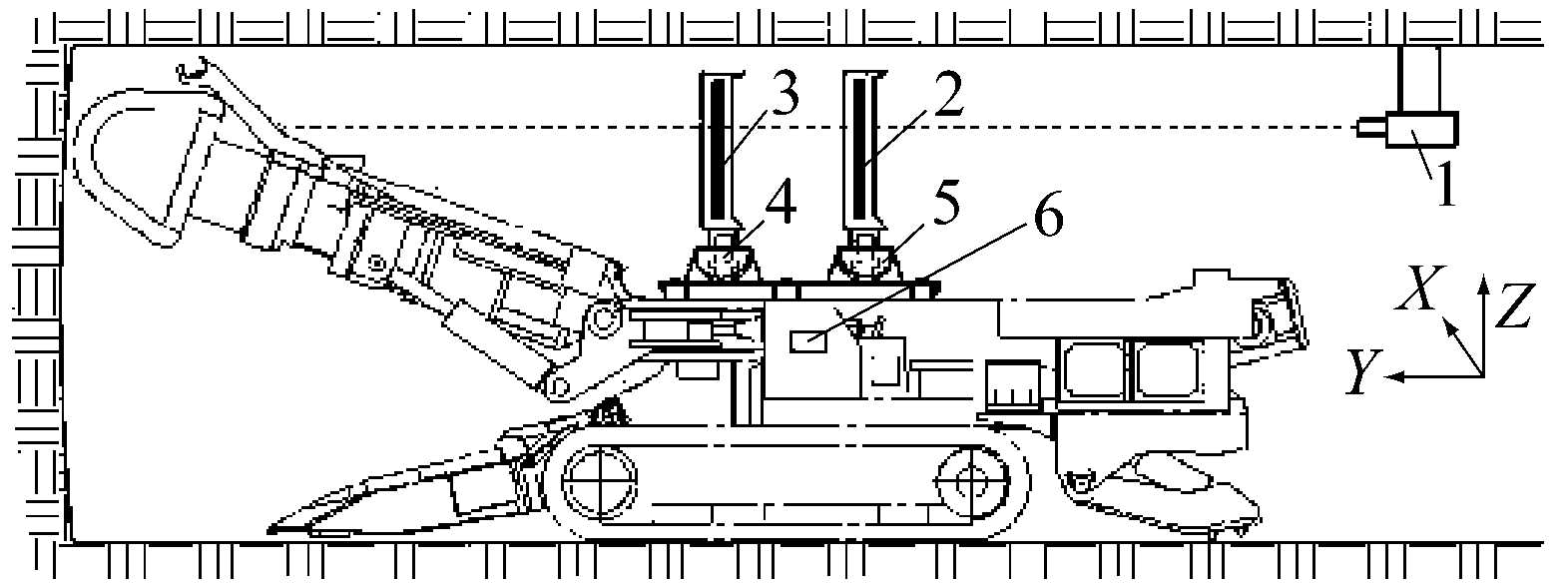
1-激光发射器; 2-激光靶标I; 3-激光靶标II; 4-激光测距仪I;5-激光测距仪II; 6-控制和显示组件
图8 基于2个回转光靶和激光测距仪的掘进机位姿检测系统
Fig.8 Position and pose measurement system of roadheader based on two rotary light targets and two laser range finders
3.2 掘进机惯性导航技术研究现状
惯性导航技术很好地解决了光电导航技术的环境适应性问题,惯性导航系统是以陀螺和加速度计为敏感器件的导航参数解算系统。其优点:① 不依赖于任何外部信息,有很强的环境适应性。② 能提供实时位置、速度、航向和姿态角数据,所产生的导航信息连续性好。其缺点:① 由于导航信息经过积分产生,所以,定位误差随时间而增大,长期精度差。② 每次使用之前需要较长的初始对准时间。
基于惯性导航的技术国内早年由重庆大学提出并进行了部分理论研究,文献[13]结合现场数据着重分析了捷联惯导数字平台中姿态矩阵的解算方法,介绍了捷联式惯导系统在无人掘进机控制系统中的软硬件实现方式及捷联矩阵的四元数解算方法。国外,澳大利亚相关研究机构在20世纪末即开始研究将惯性导航技术用于煤矿井下移动装备定位导航的可行性,已有综采工作面的应用报道,在掘进工作面尚无应用报道。近年来国内已有研究者进行了基于陀螺仪技术的巷道定向掘进试验[14]。
惯性导航系统工作中产生的位置偏差和角度偏差一般均随时间延长而增大,其中,位置偏差比角度偏差更为明显,通常都需要进行校准。位置偏差校准一般有零速校正(Zero-velocity Update, ZUPT)、GPS校准、地形匹配或里程计校准等方法,里程计校准多用于轮式车辆。所谓ZUPT,即以载体停车时的速度误差作为观测量来对载体的其他信息进行修正,其方法包括二次曲线拟合、实时卡尔曼滤波、平滑估计法等。ZUPT作为一种误差补偿技术,可以有效控制惯性导航系统长时间工作的误差累积,提高系统的精度。目前,在实际应用中,2个ZUPT点的间隔一般小于10 min,10 min以上会造成误差补偿效果不佳,频繁停车会造成使用不便。因此,用于较长时间间隔的零速校准方法一直是惯性导航技术的一个研究热点[15]。
3.3 基于多信息融合的掘进机导航技术研究现状
就目前技术现状而言,除光电导航技术和惯性导航技术外,将二者相组合进行优势互补,实现多信息多传感器融合的导航技术更有希望完美解决掘进机的导航定位问题,如将惯性导航技术与机器视觉技术组合。黄东等[14]提出一种基于机器视觉/惯性导航的掘进机位姿组合测量方法,如图9所示,通过激光捷联式惯导系统得到掘进机的姿态信息,通过单目视觉测量掘进机的位置信息,从而实现掘进机实时位姿的5自由度测量。
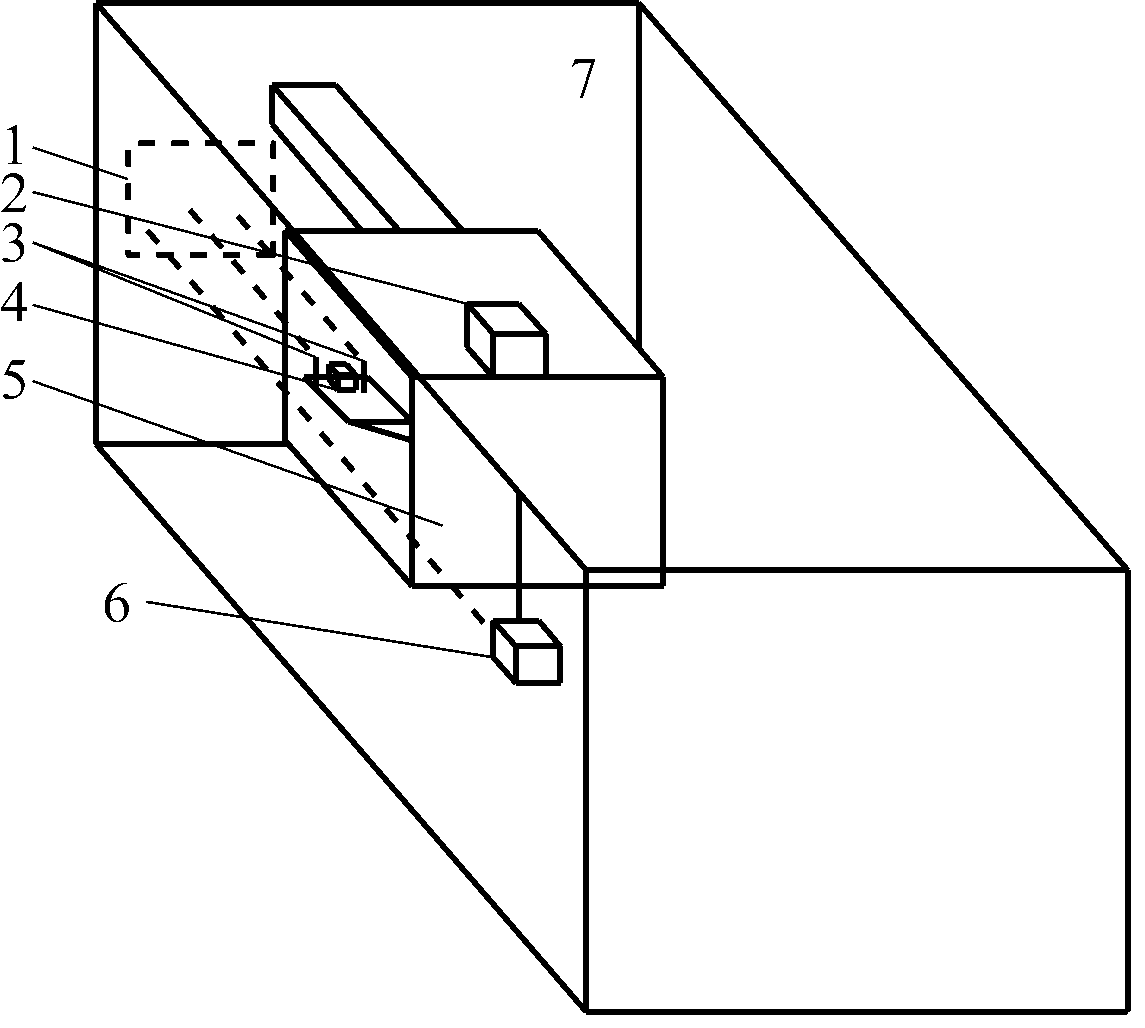
1-摄像机视场; 2-惯性导航系统I ; 3-激光器; 4-摄像机;5-掘进机; 6-激光指向仪; 7-巷道断面
图9 基于机器视觉/惯性导航的掘进机位姿组合测量方法
Fig.9 Position and pose measurement method of road header based on visual/inertial navigation combination
Justin M. Barrett等[16]提出将惯性技术和双目视觉技术相融合的导航技术,用于地下、室内或其他无GPS信号的环境中的自动导航定位。利用惯性导航技术输出的导航参数存在漂移和高动态响应,而利用视觉导航技术输出的导航参数无漂移且动态响应较低,将二者结合,利用视觉技术修正惯性导航技术的长时漂移,可得到更高的定位精度。童明敏等[17]采用三轴加速度传感器、单轴陀螺仪和超声波测距传感器,通过掘进机的位姿、转向角度和位移的多信息融合处理,实现掘进机的定位。
3.4 掘进机导航技术比较与评价
基于光电技术的导航技术的基准信号传输介质包括激光(如点激光、线激光和全站仪等)、红外、可见光等。采用光作为基准传递途径,其特点是导航系统可分为2个部分,一部分作为检测装置固定在巷道基准中,另一部分作为信号发射装置配置在掘进机机身上,随机身一起运动,或者反之,固定单元以经过标定的激光指向仪光束为基准,获取运动单元即掘进机机身的空间位置姿态。这是一种相对位置和相对姿态检测,具有技术成熟、精度高、成本低等优点,但存在以下问题:① 环境适应性较差,粉尘对可见光的衰减、水雾对红外光的吸收、空间狭窄引起的遮挡等都可能影响检测效果。② 需要阶段性地向前移动基准并重新进行基准标定。③ 距离增加使检测分辨率和检测精度下降。④ 一般仅适用于直线巷道开拓。
惯性导航技术采用的设备包括陀螺仪、加速度传感器等,其特点是测量在地球的惯性空间中进行,不需要基准传输介质,因此,环境适应性较强。与光电导航技术相比,惯性导航技术可以检测掘进机的绝对位置和绝对姿态。惯性导航技术主要用于飞行器导航定位,用于较低速的舰船或地面车辆导航定位时,通常会与卫星定位系统组合工作。掘进机相对而言采用的是一种长时短距离的工作方式,考虑到惯性导航技术长时精度差的特点及掘进机的厘米级定位需求,惯性导航技术用于掘进机的导航定位时,定位精度存在较大挑战。
信息融合即数据融合,其基本思路是利用多个传感器获取关于对象和环境的全面、完整的信息。光电导航技术虽然具有精度高的优点,但环境适应性差是其本质特性,难以根本解决;惯性导航技术环境适应性强,姿态检测精度高,但长时定位精度差;将二者融合,可能是解决掘进机空间位姿检测问题的较优途径,如文献[14]提出的方法融合了惯性导航技术和机器视觉导航技术的解决方案,相对而言更接近工程应用,基本实现了高精度空间位置和姿态检测,并具有较好的环境适应性,存在的问题主要是掘进机作业过程中的强烈震动对机载摄像机成像质量影响带来的动态检测问题。
掘进机导航定位或位姿检测的过程本质上是基准传递的过程,因此,实现信息融合的关键在于解决多信息多传感器带来的测量基准统一问题,需要鲁棒性更强的融合算法。
详细阐述了掘进机导航定位问题及其特殊性,并试图厘清相关概念和提法,认为掘进机导航定位具有长时短距、高精度、高动态等特点。结合近年来新出现的一些主流的掘进机导航定位技术,论述了其优缺点,认为光电导航装备技术成熟、精度高,但在煤矿井下应用存在较为严重的环境适应性问题,其应用前景与除尘技术的发展和应用密不可分;惯性导航技术环境适应性强,姿态检测精度较高,但长时定位精度差。对于掘进机导航定位技术未来的发展方向,认为掘进机导航定位问题的解决必须走多传感多信息融合的技术途径。
参考文献(References):
[1] 田原.悬臂掘进机自动导向和定位技术探索[J].工矿自动化,2010,36(8):26-29.
TIAN Yuan. Discussion of automatic guidance and location technology for cantilever excavator[J]. Industry and Mine Automation, 2010,36(8): 26-29.
[2] 贾文浩,陶云飞,符世琛,等. 悬臂式掘进机位姿检测方法研究进展[J]. 煤炭科学技术, 2016,44(增刊1):96-101.
[3] 王焱金, 张建广, 马昭. 综掘装备技术研究现状及发展趋势[J]. 煤炭科学技术,2015,43(11):87-90.
WANG Yanjin, ZHANG Jianguang, MA Zhao. Research status and development tendency of mine fully-mechanized heading equipment technology[J]. Coal Science and Technology,2015,43(11):87-90.
[4] GB 50213—2010 煤炭井巷工程质量验收规范[S].
[5] 朱信平, 李睿, 高娟, 等. 基于全站仪的掘进机机身位姿参数测量方法[J]. 煤炭工程, 2011,43(6):113-115.
ZHU Xinping, LI Rui, GAO Juan, et al. Position parameter measuring method of mine roadheader body base on total station[J]. Coal Engineering, 2011,43(6): 113-115.
[6] 山西焦煤集团有限责任公司, 太原理工大学. 悬臂掘进机头位姿的测量系统及其方法:2008100549066[P]. 2008-09-17.
[7] 中国矿业大学(北京), 石家庄煤矿机械有限责任公司. 掘进机机身位姿参数测量系统及其方法: 2009100910504[P].2010-01-20.
[8] 田原. 基于机器视觉的掘进机空间位姿检测技术研究[J]. 矿山机械,2013,41(2):27-30.
TIAN Yuan. Research on automatic inspection of spatial attitude and position of roadheader based on machine vision technology[J]. Mining & Processing Equipment,2013,41(2):27-30.
[9] 杜雨馨,刘停,童敏明,等.基于机器视觉的悬臂式掘进机机身位姿检测系统[J].煤炭学报,2016,41(11):2897-2906.
DU Yuxin, LIU Ting, TONG Minming, et al. Pose measurement system of boom-type roadheader based on machine vision[J]. Journal of China Coal Society, 2016, 41(11):2897-2906.
[10] 陶云飞, 宗凯, 张敏骏, 等. 基于iGPS的掘进机单站多点分时机身位姿测量方法[J]. 煤炭学报, 2015, 40(11): 2611-2616.
TAO Yunfei, ZONG Kai, ZHANG Minjun, et al. A position and orientation measurement method of single-station, multipoint and time-sharing for roadheader body based on iGPS[J]. Journal of China Coal Society,2015,40(11):2611-2616.
[11] 吴淼, 贾文浩, 华伟, 等. 基于空间交汇测量技术的悬臂式掘进机位姿自主测量方法[J]. 煤炭学报,2015,40(11):2596-2602.
WU Miao, JIA Wenhao, HUA Wei, et al. Autonomous measurement of position and attitude of boom-type roadheader based on space intersection measurement[J]. Journal of China Coal Society,2015,40(11):2596-2602.
[12] 齐宏亮.掘进机器人位姿测控系统研究[D].阜新:辽宁工程技术大学,2012.
[13] 冯大龙.捷联式惯导系统在无人掘进机中的应用[D].重庆:重庆大学,2007.
[14] 黄东,杨凌辉,罗文,等.基于视觉/惯导的掘进机实时位姿测量方法研究[J].激光技术,2017,41(1):19-23.
HUANG Dong, YANG Linghui, LUO Wen, et al. Study on measurement method of realtime position and attitude of roadheader based on vision/inertial navigation system[J]. Laser Technology,2017,41(1):19-23.
[15] 奔粤阳, 孙枫, 高伟, 等. 惯导系统的零速校正技术研究[J]. 系统仿真学报,2008,20(17):4639-4642.
BEN Yueyang, SUN Feng, GAO Wei, et al. Study of zero velocity update for inertial navigation[J]. Journal of System Simulation,2008,20(17):4639-4642. [16] BARRETT J M,GENNERT M A,MICHALSON W R, et al. Development of a low-cost, self-contained, combined vision and inertial navigation system[C]//IEEE International Conference on Technologies for Practical Robot Applications,2013:1-6.
[17] 童敏明, 杜雨馨, 李高军, 等. 多传感器的掘进机定位系统研究[J]. 煤矿机械,2013,34(6):146-148.
TONG Minming, DU Yuxin, LI Gaojun, et al. Study on positioning system of roadheader by multi sensor[J]. Coal Mine Machinery,2013,34(6):146-148.
Present situation and development direction of navigation technology of boom-type roadheader
TIAN Yuan1,2
(1.CCTEG Taiyuan Research Institute, Taiyuan 030006, China; 2.Shanxi Tiandi Coal Mining Machinery Co., Ltd., Taiyuan 030006, China)
Abstract:Problems of navigation and positioning of boom-type roadheader and its particularity and mathematical description were described. Status of technology of electro-optical navigation and positioning and pose detection, technology of inertial navigation, and navigation and positioning technology based on multi-information fusion were analyzed in details. The conclusions were obtained: the technology of electro-optical navigation is mature and has high precision, but there are serious environmental adaptability problems in coal mine application; the inertial navigation technology has strong adaptability, high accuracy of pose detection, but has poor precision of long-term positioning; the technology based on fusions of multi-information and multi-sensor, which combining electro-optical navigation and inertial navigation, may be the better way to solve the problem of spatial position and pose detection of boom-type roadheader, the key to realization of information fusion is to solve measuring benchmarking issues brought from multi-information and multi-sensor, and more robust fusion algorithm is needed.
Key words:boom-type roadheader; navigation and positioning; spatial position and pose;inertial navigation; electro-optical navigation
收稿日期:2017-04-18;
修回日期:2017-06-12;责任编辑:胡娴。
基金项目:中国煤炭科工集团有限公司科技项目(2016MS016)。
作者简介:田原(1976-),男,山西忻州人,副研究员,博士,主要研究方向为煤机装备自动化,E-mail:33231495@qq.com。
引用格式:田原.悬臂式掘进机导航技术现状及其发展方向[J].工矿自动化,2017,43(8):37-43. TIAN Yuan. Present situation and development direction of navigation technology of boom-type roadheader[J].Industry and Mine Automation,2017,43(8):37-43.
文章编号:1671-251X(2017)08-0037-07
DOI:10.13272/j.issn.1671-251x.2017.08.008
中图分类号:TD632.2
文献标志码:A 网络出版时间:2017-07-27 09:57
网络出版地址:http://kns.cnki.net/kcms/detail/32.1627.TP.20170727.0957.008.html