图1 环形低速风洞结构
Fig.1 Structure of a circular low speed wind tunnel
科研成果
褚卫忠1,2
(1.中煤科工集团常州研究院有限公司, 江苏 常州 213015;2.天地(常州)自动化股份有限公司, 江苏 常州 213015)
摘要:为了满足矿用风速传感器的快速、准确、自动化检测和矿用气体传感器风速影响测试的需求,设计了一种环形低速风洞自动控制系统。该系统采用PLC为主控单元,根据风速与静压差的关系,通过对大气压力、空气温度、静压差的自动采集与计算,利用PID控制模块对变频器进行快速控制,最终通过控制电动机转速的变化,实现风速的自动输出。以检测GFY15矿用风速传感器为例,对测量过程中的皮托管、自动控制系统、风洞风速的不均匀性、不稳定性和流场紊流度等的不确定度进行了分析评定,结果表明,该自动控制系统能够满足矿用风速传感器自动化检测的需求。
关键词:环形低速风洞; 自动控制; 风速传感器; 气体传感器; 不确定度评定
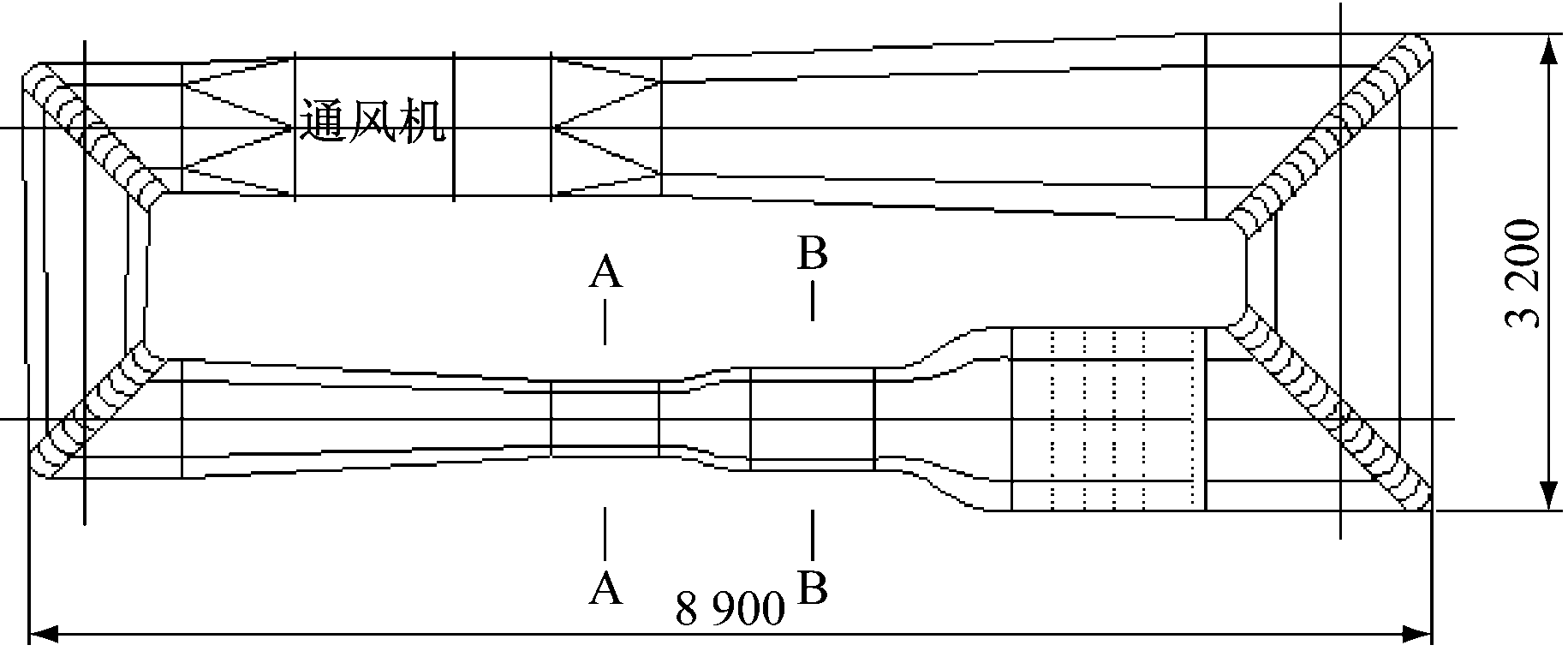
在进行风速传感器示值误差检测和矿用气体传感器风速影响测试时,风洞是必不可少的设备。本文中的环形低速风洞是封闭式风洞,总体外形尺寸为8 900 mm×3 200 mm×2 000 mm,共有2个八角形工作段(A-A、B-B),尺寸分别为500 mm×500 mm和700 mm×700 mm,工作段流速为0.2~30 m/s,简单结构示意如图1所示。
图1 环形低速风洞结构
Fig.1 Structure of a circular low speed wind tunnel
由于建设时的条件限制,风洞一直采用手动控制,检测时要人工读取大气压力、空气温度,计算出空气密度和微差压计液面的目标高度,然后手动反复调节变频器输出频率以控制电动机转速,得到目标风速。这一系列的操作完全依赖手工,测试过程不连续,测试时间长,效率极低,且受测试人员水平等因素影响,很难保证测试结果的准确性和一致性。因此,这种检测方式已经不适应当前快速、准确、自动化检测的需求,迫切需要对风洞进行自动化改造。
国内从20世纪90年代开始研究风洞的自动化控制系统,基本方法是利用可输出信号的高精度传感器代替原有的机械式、单体式传感器[1],利用各种控制系统实现对电动机的自动闭环控制,以得到不同的稳定风速[2]。这些控制系统根据电动机调速方式可分为调压调速、电磁调速、变频调速系统等,根据控制系统平台可分为微机控制、专用控制器控制、PLC控制等。其中调压调速方式简单易控制,但调速范围窄,效率低;电磁调速方式简单、实用,调速平滑,但需增加电磁转差离合器和控制器;变频调速方式控制精度高、调速性能好,且可利用现有设备。鉴此,在兼顾系统的抗干扰性能及最大化利用现有设备条件下,采用PLC和变频调速方式设计了一种环形低速风洞自动控制系统。
1.1 系统硬件设计
环形低速风洞自动控制系统框图如图2所示。
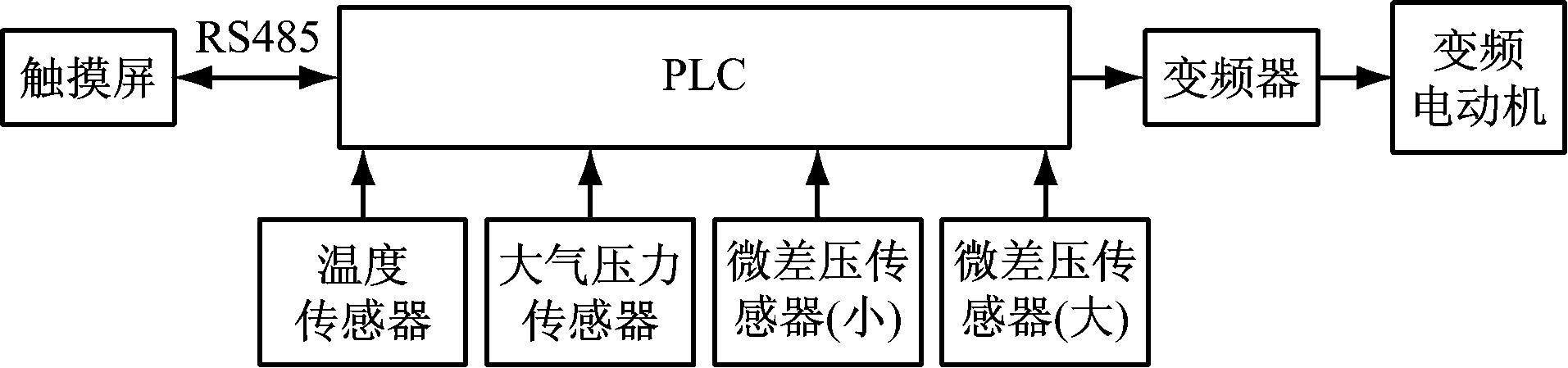
图2 环形低速风洞自动控制系统
Fig.2 Automatic control system of circular low speed wind tunnel
该系统根据MT 448—2008《矿用风速传感器》[3]和MT 380—2007《煤矿用风速表》[4]的要求,以风速与静压差的关系(式(1)),通过对大气压力、空气温度、静压差的自动采集与计算,利用S7-200系列PLC自带的PID控制模块对变频器进行快速控制,最终通过控制电动机转速的变化,实现风速的自动输出。
Vs=![]()
(1)
式中: Vs为真实风速值,m/s;p为实时静压差值, Pa;ε为皮托管系数;ρ为空气密度,kg/m3,ρ=3.483×10-3×![]() ,P0为大气压力,Pa,t为试验环境温度,℃。
,P0为大气压力,Pa,t为试验环境温度,℃。
根据式(1)反推,在1 m/s风速下,静压差约为0.6 Pa,而在30 m/s风速下,静压差约为532 Pa,考虑留有一定余量,建议差压传感器测量范围为0~750 Pa。由于差压值测量范围较宽,因此,系统最终选择由“一大一小”2个差压传感器采集静压差值。大量程传感器参数:测量范围为0~750 Pa,误差不大于±0.065%;小量程传感器参数:测量范围为0~25 Pa,误差不大于±0.1%。大气压力传感器参数:测量范围为55~110 kPa,误差不大于±0.08%;温度传感器测量范围为0~100 ℃,误差不大于±0.1%。
1.2 系统软件设计
环形低速风洞自动控制系统软件采用STEP 7编制,主要包括初始化、人机对话、目标值计算、传感器校准与采集、PID控制等子程序。通过触摸屏输入目标风速值,PLC计算目标静压差值,将其作为给定值,并实时采集当前静压差值,输入到PID控制模块,最终输出模拟信号给变频器,变频器通过改变电动机输入频率来改变电动机转速,从而达到改变风速的目的,PID控制参数由PLC进行自动学习匹配。环形低速风洞自动控制系统软件流程如图3所示。
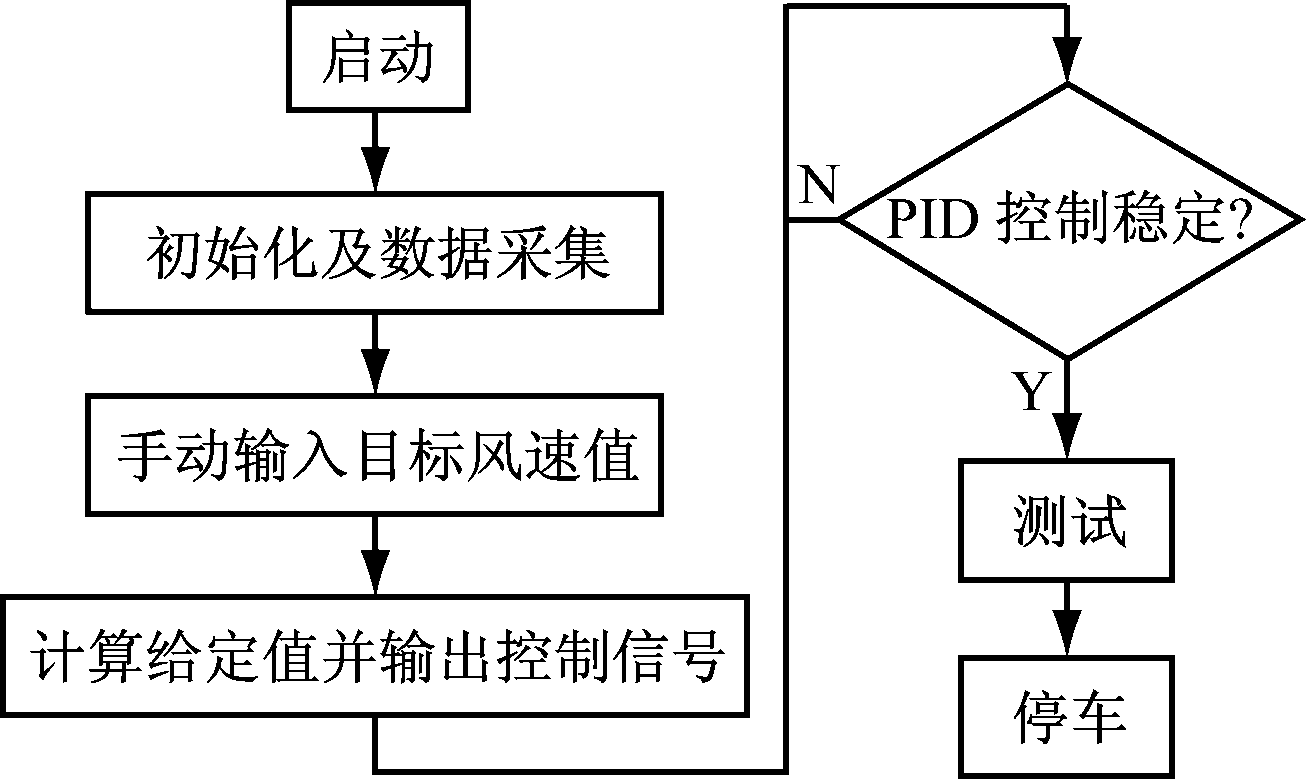
图3 环形低速风洞自动控制系统软件流程
Fig.3 Software diagram of automatic control system of circular low speed wind tunnel
1.3 系统抗干扰设计
系统中变频器驱动电动机工作时,变频器内的大功率脉冲发生器输出脉冲控制逆变电桥驱动电动机工作,是非常大的干扰源[5],如果不采取有效的抗干扰措施,对控制系统的稳定性和准确性的影响非常大。
该自动控制系统主要采取了以下措施提高整体抗干扰能力:
(1) 控制器采用S7-200 PLC,抗干扰设计稳定可靠。
(2) 各个传感器与PLC之间、PLC与变频器之间均采用4~20 mA电流信号,且使用屏蔽电缆传输,以增强抗干扰能力。
(3) 控制系统其他设备远离变频器安装,并将变频器安装于独立壳体中,控制系统壳体和变频器壳体分开接地。
(4) 控制系统至变频器的线缆远离其他信号线缆,并以最短路径引至控制壳体外部。
测量不确定度是表征测量结果可信性、有效性的怀疑程度或不肯定程度[6],是定量说明测量结果的质量的一个参数,同时也是表征仪器仪表测量能力的参数,通常以扩展不确定度来表示[7]。本文以GFY15矿用风速传感器为例,依据MT 448—2008《矿用风速传感器》对其示值误差进行检测,介绍环形低速风洞自动控制系统的不确定度评定。
实验室温度可控制在25 ℃左右,大气压力值约为101.25 kPa,皮托管系数为0.998。
2.1 示值误差测量数学模型
示值误差测量的数学模型为
ΔV=Vs-V
(2)
式中:ΔV为示值误差,m/s;V为被测设备,即GFY15矿用风速传感器指示值,m/s。
2.2 方差和传播系数
测量结果的合成标准不确定度uc(ΔV)是合成方差![]() 的正平方根,如式(3)所示。
的正平方根,如式(3)所示。
![]() (ΔV)=c2(Vs)u2(Vs)+c2(V)u2(V)
(ΔV)=c2(Vs)u2(Vs)+c2(V)u2(V)
(3)
式中:u(Vs)为风洞产生的标准风速引起的标准不确定度分量;u(V)为被测设备引起的标准不确定度分量;c(Vs)和c(V)为灵敏度系数,c(Vs)=![]() =1, c(V)=
=1, c(V)=![]() =1。
=1。
将c(Vs)和c(V)代入式(3), 得
(4)
2.3 标准不确定度分量的分析与计算
依据JJF1059—1999《测量不确定度评定与表示》[8]规定,区别各输入量的标准不确定度评定方法上的差异,将标准不确定度的评定划分为A类评定和B类评定。
2.3.1 A 类标准不确定度评定
利用贝塞尔公式计算一组测量数据的测量误差的标准偏差SVi:
SVi=
(5)
式中:ΔVi为每次测量的示值误差;Δ![]() i为多次测量的示值误差平均值;n为测量次数。
i为多次测量的示值误差平均值;n为测量次数。
根据MT 448—2008《矿用风速传感器》的规定,并结合JJG(气象)004—2011《自动气象站风向风速传感器检定规程》[9],本文选择风速为0.4,3,15 m/s的3个测点进行评定,每个测点进行10次重复测量,根据式(2)、式(5)计算得出的测量误差的重复性标准偏差见表1。
由于测量误差的重复性不确定度分量大于被测设备的分辨力的不确定度分量,故可只考虑重复性不确定度分量。
2.3.2 B类标准不确定度的评定
B类标准不确定度的主要来源包括该自动控制系统的不确定度分量(含皮托管系数误差、数字微差压计误差、温度传感器误差、大气压力传感器误差)[10]、风洞风速的不均匀性[11]、不稳定性和流场紊流度等[12]。
表1 测量误差的重复性标准偏差
Table 1 The repeatability standard deviation of measurement errors m/s

该自动控制系统引入的不确定度[13]:根据式(1)可得,由该自动控制系统引入的合成标准不确定度u(Vs1)是合成方差u2(Vs1)的正平方根,由式(6)确定:
u2(Vs1)=c2(t)u2(t)+c2(p)u2(p)+ c2(p0)u2(p0)+c2(ε)u2(ε)
(6)
式中:u(t)为由温度传感器引入的不确定度分量;u(p)为由微差压传感器引入的不确定度分量;u(p0)为由大气压力传感器引入的不确定度分量;u(ε)为由皮托管引入的不确定度分量;c(t),c(p),c(p0),c(ε)分别为上述不确定度分量的灵敏度系数[14],其中:c(t)=![]() ; c(p)=
; c(p)=![]() ;c(p0)=
;c(p0)=![]() ;c(ε)=
;c(ε)=![]() 。
。
由环境条件可知:t=25 ℃,P0=101.25 kPa,ε=0.998;Vs=0.4 m/s时,p=0.094 Pa;Vs=6 m/s时,p=21.33 Pa;Vs=15 m/s时,p=133.33 Pa。
(1) 由温度传感器误差引入的不确定度u(t)的评定:由所使用温度传感器的精度为1/10 DIN可知,在0~100 ℃范围内其误差不大于±0.08 ℃,服从均匀分布,故u(t)=![]() ℃=0.046 ℃。
℃=0.046 ℃。
(2) 由大气压力传感器误差引入的不确定度u(p0)的评定:由大气压力传感器的技术说明书可知,其误差不大于±0.08%,测量范围为55~110 kPa,即其误差不大于±44 Pa,服从均匀分布,故 u(p0)=![]() Pa=25.4 Pa。
Pa=25.4 Pa。
(3) 由皮托管系数误差引入的不确定度u(ε)的评定:由皮托管的检定规程可知,其偏差不大于0.04,服从均匀分布,故u(ε)=![]() =0.012。
=0.012。
(4) 由小量程微差压计的误差引入的不确定度u(ps)的评定:由小量程微差压计的技术说明书可知,其误差不大于±0.1%,测量范围为0~25 Pa,即其误差不大于±0.025 Pa,服从均匀分布,故u(ps)=![]() Pa=0.014 Pa。
Pa=0.014 Pa。
(5) 由大量程微差压计的误差引入的不确定度u(pl)的评定:由大量程微差压计的技术说明书可知,其误差不大于±0.065%,测量范围为0~750 Pa,即其误差不大于±0.488 Pa,服从均匀分布,故u(pl)=![]() Pa=0.282 Pa。
Pa=0.282 Pa。
(6) 由该自动控制系统引入的合成标准不确定度评定:根据式(5)可得Vs分别为0.4,6,15 m/s时,u(Vs1)分别为0.030,0.054,0.092 m/s。
(7) 由风洞工作段流速稳定性引入的不确定度u(Vs2)的评定:由环形低速风洞的技术说明书可知,其工作段流速稳定性相对偏差不大于0.5%,服从均匀分布,故u(Vs2)=![]() =0.14%,对应其标准不确定度为0.021 m/s。
=0.14%,对应其标准不确定度为0.021 m/s。
(8) 由风洞工作段流速均匀性引入的不确定度u(Vs3)的评定:由环形低速风洞的技术说明书可知,其工作段流速均匀性相对偏差不大于1%,服从均匀分布,故u(Vs3)=![]() =0.28%,对应其标准不确定度为0.042 m/s。
=0.28%,对应其标准不确定度为0.042 m/s。
(9) 由风洞工作段紊流度引入的不确定度u(Vs4)的评定:由环形低速风洞的技术说明书可知,其工作段紊流度不大于0.5%,服从均匀分布,故u(Vs4)=![]() =0.14%,对应其标准不确定度为0.021 m/s。
=0.14%,对应其标准不确定度为0.021 m/s。
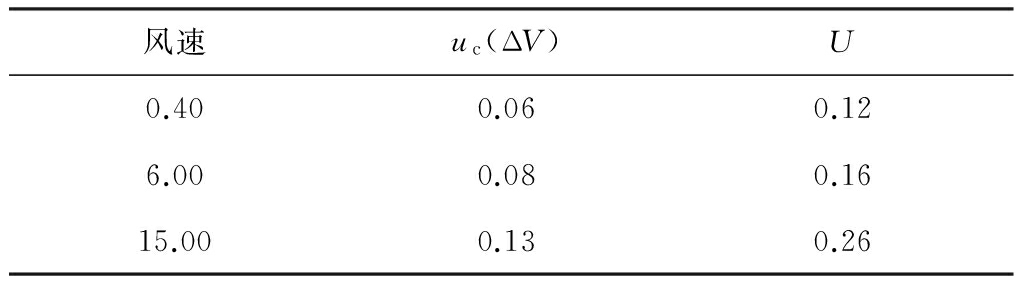
2.3.3 合成标准不确定度uc(ΔV)及扩展不确定度U评定
合成标准不确定度uc(ΔV)由式(4)计算,扩展不确定度U=kuc(ΔV)[15],在k=2时,评定结果见表2。
表2 合成标准不确定度及扩展不确定度评定结果
Table 2 Evaluation results of synthesis standard uncertainty and expanded uncertainty m/s
(1) 环形低速风洞自动控制系统通过PLC采集高精度传感器输出信号,采用PID控制变频通风机实现对环形风洞风速的自动化控制,运行中仅需输入目标风速值,操作简单,风速稳定时间不大于10 s。且该系统通过一系列抗干扰措施的实施,运行非常稳定。
(2) 以GFY15矿用风速传感器为例,对该系统测量过程中的不确定度进行了评定,测量结果表明,不确定度满足使用要求,验证了该系统设计的科学性。该系统能够满足矿用风速传感器示值误差要求和矿用气体传感器风速影响下快速、准确、自动化检测的需求。
参考文献(References):
[1] 王晓英,罗惕乾,沙毅,等.低速风洞测控系统的改进与提高[J].农机化改造,2006(7):57-59.
WANG Xiaoying,LUO Tiqian,SHA Yi,et al.Improvement of measurement and control System of low speed wind tunnel [J].Journal of Agricultural Mechanization Research,2006(7):57-59.
[2] 党幼云,杨艳霞,李建英.PLC与人机界面在低速风洞调速系统上的应用[J].西安工程科技学院学报,2006,20(6):787-790.
DANG Youyun,YANG Yanxia,LI Jianying. The application of PLC and human machine interface and inverter in the speed-adjust system of the low speed wind tunnel experiment[J].Journal of Xi'an University of Engineering Science and Technology,2006,20(6):787-790.
[3] MT 448—2008 矿用风速传感器 [S].
[4] MT 380—2007 煤矿用风速表 [S].
[5] 施洪昌,张永双,许海燕,等.风洞测控系统干扰及抑制[J].工业控制计算机,2004,17(9):7-8.
SHI Hongchang,ZHANG Yongshuang,XU Haiyan,et al.Interference and restrain of wind tunnel measurement and control system [J].Industrial Control Computer,2004,17(9):7-8.
[6] 李慎安.测量不确定度的定义及其有关问题[J].计量技术,1999(6):47-50.
LI Shenan.The definition of measurement uncertainty and its related problem [J].Measurement Technique,1999(6):47-50.
[7] 宋明顺.测量不确定度评定与数据处理[M].北京:中国计量出版社,2000:225-232.
[8] JJF1059—1999 测量不确定度评定与表示[S].
[9] JJG(气象)004—2011 自动气象站风向风速传感器检定规程[S].
[10] 杨波,颜平江,李文博.风速传感器测量值的不确定度评定[J].计量与测试技术,2015,42(1):46-49.
YANG Bo,YAN Pingjiang,LI Wenbo.Uncertainty evaluation of wind speed sensor measurement results [J].Metrology & Measurement Technique,2015,42(1):46-49.
[11] 黄蕊,党选发,宋媛.风速检定装置不确定度的评定[J].气象水文海洋仪器,2011,28(3):28-30.
HUANG Rui,DANG Xuanfa,SONG Yuan.Uncertainty evaluation of wind speed verification device[J].Meteorological,Hydrological and Marine Instruments,2011,28(3):28-30.
[12] 朱正宪,孟小红.影响风速仪表量值准确度的因素分析[J].煤炭工程师,1997(1):18-20.
ZHU Zhengxian,MENG Xiaohong.Factors analysis of the accuracy of wind speed meter value [J].Coal Engineering,1997(1):18-20.
[13] 王三伟.矿用风速表示值误差测量不确定度评定[J].中国计量,2007(6):79-80.
WANG Sanwei.Uncertainty evaluation of error measurement of mine wind speed indicating value [J].China Metrology,2007(6):79-80.
[14] 朱正宪.通风机流量测量不确定度评定[J].矿业安全与环保,2001,28(6):32-34.
ZHU Zhengxian.Uncertainty assessment of mine fan flowrate measurement [J].Mining Safety and Environmental Protection,2001,28(6):32-34.
[15] 孟小红,杨诚,朱正宪.矿用风速表测量不确定度评定[J].计量与测试技术,2004,31(2):33-34.
MENG Xiaohong,YANG Cheng,ZHU Zhengxian.Uncertainty assessment of mine anemometer measurement [J].Metrology & Measurement Technique,2004,31(2):33-34.
Design of automatic control system of circular low speed wind tunnel and its measurement uncertainty evaluation
CHU Weizhong1,2
(1.CCTEG Changzhou Research Institute, Changzhou 213015, China; 2.Tiandi(Changzhou) Automation Co.,Ltd., Changzhou 213015, China)
Abstract:In order to satisfy demands of rapid, accurate, automatic detection of mine-used wind speed sensor and wind speed impact test of mine-used gas sensor, an automatic control system of circular low speed wind tunnel was designed. The system uses PLC as main control unit, and adopts PID control module to control frequency converter fastly according to relationship between wind speed and static pressure difference and through automatic collection and calculation of atmospheric pressure, wind temperature, static pressure difference, so as to realize automatic output of wind speed by controlling change of rotate speed of motor. The uncertainty evaluation was analyzed including uniformity, stability and turbulence intensity of pitot tube, automatic control system, wind tunnel wind speed in the measuring process for detecting GFY15 mine-used wind speed sensor as example.The evaluation results show that the automatic control system can meet needs of automatic detection for mine-used wind speed sensor.
Key words:circular low speed wind tunnel; automatic control; wind speed sensor; gas sensor; uncertainty evaluation
收稿日期:2017-03-29;
修回日期:2017-06-14;责任编辑:张强。
基金项目:国家安全生产监管监察技术支撑能力建设项目(2014ZX002)。
作者简介:褚卫忠(1985-),男,山东泰安人,工程师,现主要从事矿用监控、通信类设备检测检验工作,E-mail:cwz0014@163.com。
引用格式:褚卫忠.环形低速风洞自动控制系统设计及其测量不确定度评定[J].工矿自动化,2017,43(8):1-5. CHU Weizhong. Design of automatic control system of circular low speed wind tunnel and its measurement uncertainty evaluation[J].Industry and Mine Automation,2017,43(8):1-5.
文章编号:1671-251X(2017)08-0001-05
DOI:10.13272/j.issn.1671-251x.2017.08.001
中图分类号:TD67
文献标志码:A 网络出版时间:2017-07-27 09:18
网络出版地址:http://kns.cnki.net/kcms/detail/32.1627.TP.20170727.0918.001.html