图1 无线液压支架控制器硬件结构
郭峰1,2, 牛一村1,2
(1.煤炭科学技术研究院有限公司, 北京 100013;2.煤炭资源高效开采与洁净利用国家重点实验室, 北京 100013)
摘要:针对有线液压支架控制器在实际操作过程中存在的布线困难、易损坏、操作范围受限等问题,设计了一种无线液压支架控制器,介绍了以MSP430F149为控制核心的硬件电路设计,阐述了基于事件触发的控制器软件设计思路及按键中断服务程序和通信中断服务程序设计方案。测试结果表明,该无线液压支架控制器实现了单台液压支架控制、邻架控制及支架成组控制,数据传输速率为115 200 bit/s,误码率为0,控制距离达25 m,待机功耗仅为10 mW,支架动作响应时间不超过500 ms。
关键词:煤炭开采; 液压支架; 液压支架控制器; 无线传输; 邻架控制; 支架成组控制
液压支架是煤矿综采工作面的核心设备之一,其自动化控制是提高煤矿开采效率的关键。单台液压支架一般具有升/降柱、平衡伸/收、护帮伸/收、推溜/移架、前梁伸/收、侧护伸/收等功能,有些特殊应用支架还有更多附加功能。整个工作面液压支架之间还需要完成成组动作、协调控制等。液压支架的功能越复杂,对液压支架控制器的操控要求越高。一段时间以来,中国的液压支架控制系统完全依赖进口,价格昂贵,且配件供货周期较长。经过近几年的快速发展,国产液压支架控制系统取得了较大突破,国内多个厂家已经具备自主知识产权[1-3]。
现有液压支架控制系统大多采用有线传输方式,每台液压支架配备1台控制器,并将控制器固定在支架上。该方式需要大量布线,安装、维护量大,且工作面恶劣工况易导致设备损坏,系统故障率高;控制器固定在支架上极大限制了操作范围,不便于操作人员观察被控支架的工作状态,降低了工作效率,甚至会引起误操作。将无线通信技术应用于液压支架控制器,可减少电缆数量,且当控制器发生故障时,可随时使用备用设备,尽可能减小或避免对生产作业的影响,并可将故障控制器携带至地面维修,避免在煤矿井下拆装、更换。
目前无线液压支架控制器大多处于研究阶段,只有少数厂家实现了工业应用,与全面推广还有一定距离[4-5]。在此背景下,本文设计了一种无线液压支架控制器,并在6台液压支架和6套模拟装置上进行了性能测试。
1.1 硬件结构
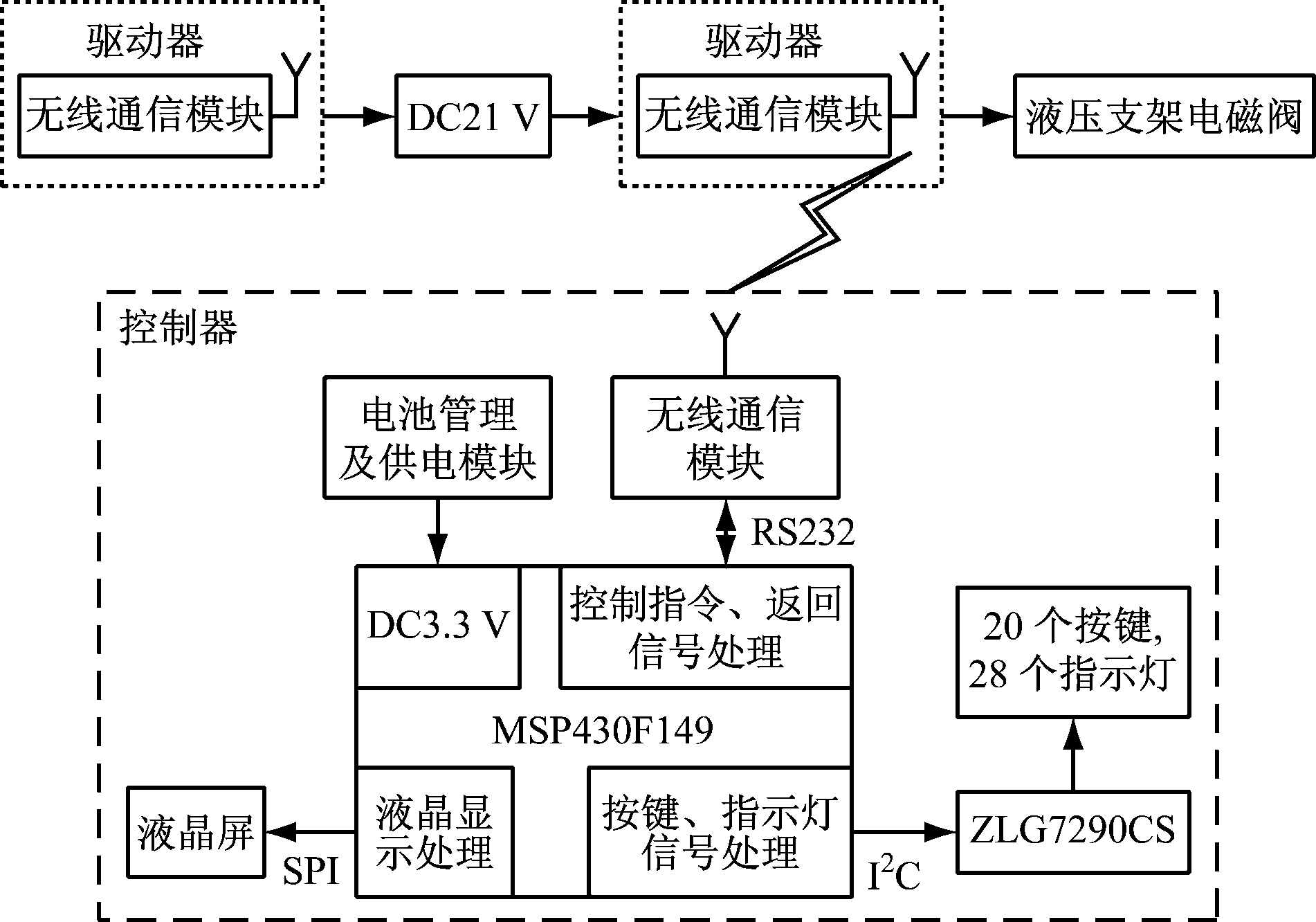
控制器是液压支架控制系统的核心设备,液压支架控制系统的动作指令通过控制器传送给驱动器,由驱动器驱动液压支架电磁阀动作,从而实现液压支架各种动作的自动控制。无线液压支架控制器硬件结构如图1所示。控制器的核心处理器选用MSP430F149,其为16位体系结构,有2个16位内置定时器、2个通用串行同步/异步通信接口、60 kB+256 B闪存、2 kB RAM,待机电流仅为1.6 μA,满足控制器设计及应用需求[6-7]。控制器由锂电池供电,电池管理及供电模块具有电量监测及电池充放电管理功能。控制器通过无线通信模块与驱动器进行控制指令与反馈信号的传输,通过SPI总线将液压支架动作状态、编号等信息发送至液晶屏上进行显示,通过I2C总线向键盘扫描管理及指示灯显示驱动芯片ZLG7290CS传输按键和指示灯信号。
图1 无线液压支架控制器硬件结构
1.2 无线通信模块
无线通信模块采用单片射频收发芯片CC1100设计。CC1100工作于420~440 MHz频段,内部集成了软件可编程的调制解调器,通信频道和输出功率可通过程序设置,传输速率最高达500 kbit/s[8]。CC1100具有无线唤醒、数据收发、数据缓冲、数据链路质量评估、空闲信道评估等功能,并可设置为多种低功耗工作模式,满足手持设备的低功耗设计要求。CC1100通过4线SPI兼容接口(SI,SO,SCLK,CSn)进行配置,外围电路器件较少,有利于缩减电路板体积[9]。
1.3 按键与指示灯接口电路
根据无线液压支架控制器实际工况需要,对ZLG7290CS典型应用接口电路[10]进行了适当调整,设计了20个按键和28个指示灯电路(ZLG7290CS最多可扩展64个按键,包含56个“普通键”和8个“功能键”),如图2所示。8个按键作复用功能键,分别对应2个指示灯,另外12个按键对应独立指示灯。采用二极管防止按键干扰指示灯显示,按键电阻取3.3 kΩ。指示灯采用共阴极连接方式,其限流电阻为220 Ω。为使电源VCC更加稳定,在VCC与地之间接入220 μF电解电容。晶振为4 MHz,调节电容均为12 pF。复位信号位![]() 低电平有效,外接RC复位电路。根据I2C总线协议要求,信号线SCL和SDA必须分别加上拉电阻,取值10 kΩ。除电源外,ZLG7290CS只需将时钟信号线SCL、数据信号线SDA及键盘中断请求信号线
低电平有效,外接RC复位电路。根据I2C总线协议要求,信号线SCL和SDA必须分别加上拉电阻,取值10 kΩ。除电源外,ZLG7290CS只需将时钟信号线SCL、数据信号线SDA及键盘中断请求信号线![]() 与MSP430F149相连,即可控制20个按键和28个指示灯,大大减少了MSP430F149 IO占用。
与MSP430F149相连,即可控制20个按键和28个指示灯,大大减少了MSP430F149 IO占用。
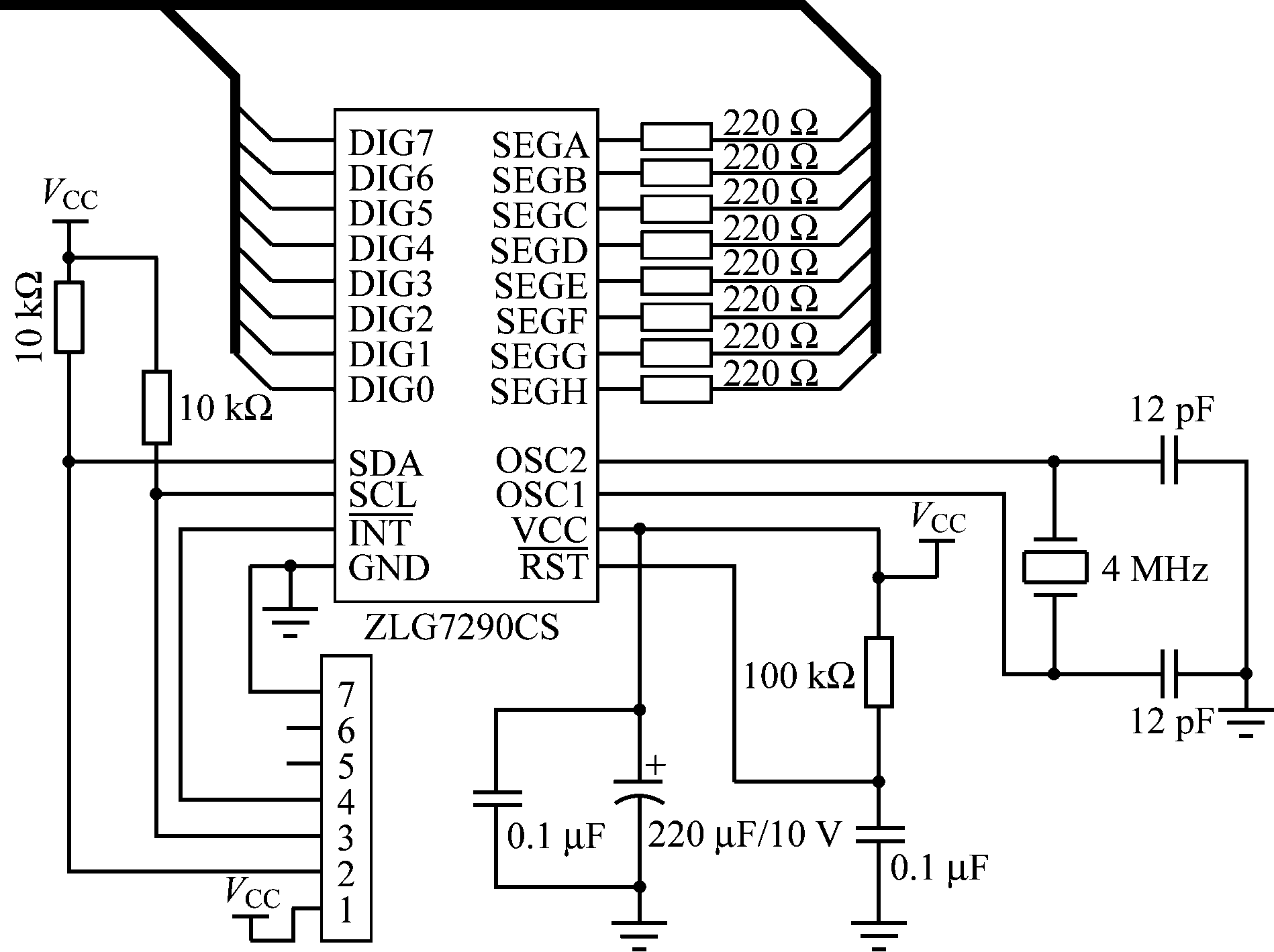
图2 按键与指示灯接口电路
1.4 液晶显示接口电路
液晶显示接口电路由液晶屏、驱动IC、字库IC组成。液晶屏可显示128列×64行点阵单色图片。MSP430F149从字库IC中读取字符的二进制编码,然后将二进制编码写入驱动IC,从而将字符显示在液晶屏上。读取和写入操作采用串行外围接口实现高速可靠通信。液晶屏的对比度可通过软件编程来调节,背光亮度可通过改变限流电阻实现,且背光电源由MSP430F149控制,使控制器在休眠状态时功耗尽可能低。
1.5 电池管理及供电模块
电池管理及供电模块电路如图3所示。电池采用容量为1 800 mA·h的锰酸锂聚合物防爆矿用电池,电池充电管理芯片采用TP4056。其是一款恒流、恒压的线性充电器,适用于单节锂离子电池,具有热反馈电路,可自动调节充电电流,有效防止在大功率充电或高环境温度条件下芯片温度过高。TP4056采用内部PMOSFET架构,具有防倒充电路,不需要在外部设置隔离二极管。其充电电压为4.2 V,充电电流可通过一个外部电阻进行设置。当充电电压达到最终浮充电压且充电电流降至设定电流的1/10后,TP4056将自动停止充电[11-12]。
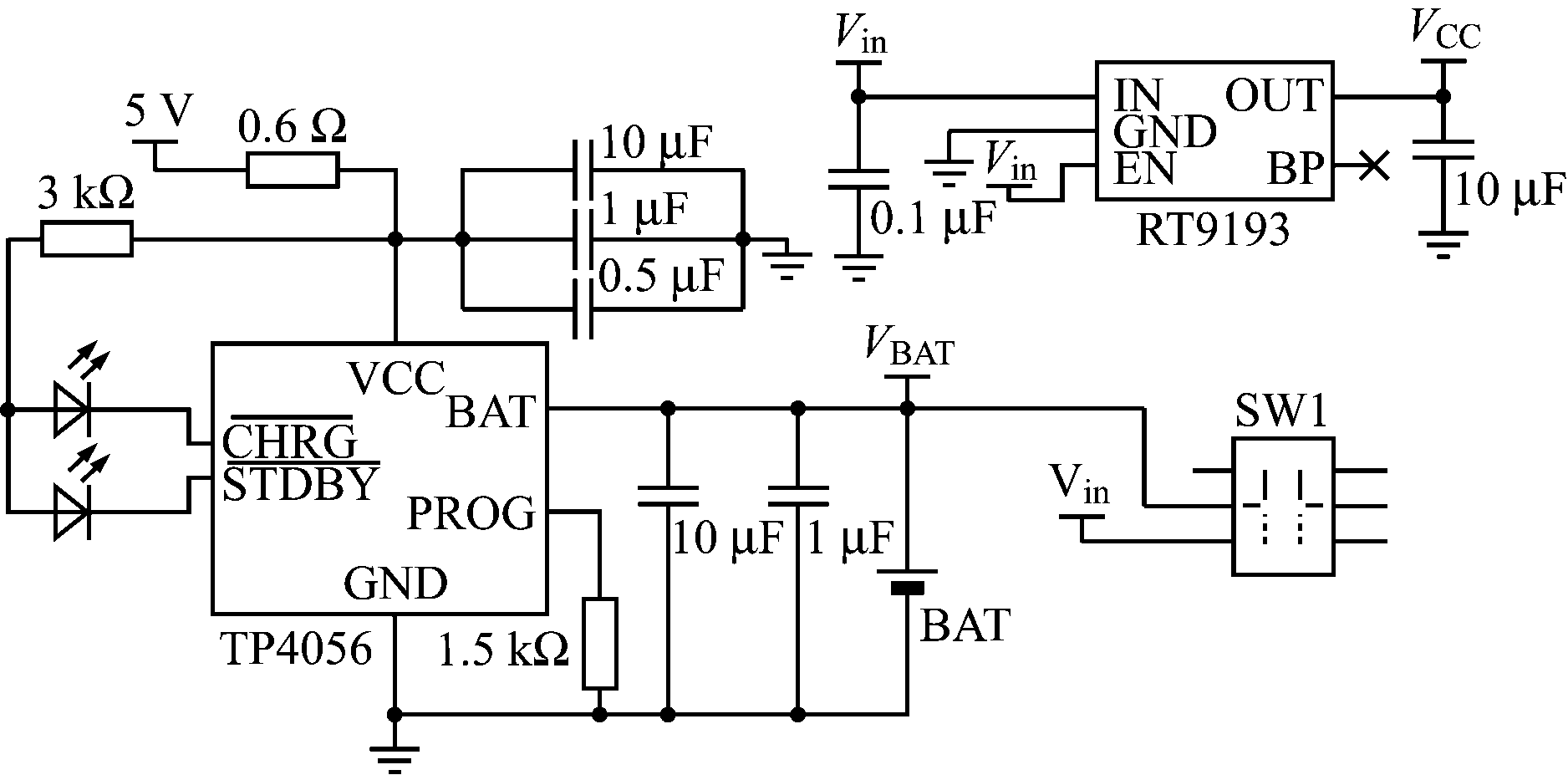
图3 电池管理及供电模块电路
为实现稳压供电,采用低压差线性稳压器件RT9193,其具有极低的噪声和静态电流消耗,即使工作在直通状态下,其电流也只有轻微增大,可有效延长电池使用时间。RT9193 在关机模式下电流低于0.01 μA,启动时长小于50 μs,具有极低的电压差、高输出电压精度、电流限制保护和高纹波抑制比[13]。
为降低控制器功耗,软件采用事件触发结构,只有发生按键和通信事件时,控制器才会响应和处理,减少了MSP430F149扫描、查询等工作量,最大限度发挥MSP430F149的低功耗性能[14-15]。主程序仅对MSP430F149端口、无线射频通信、按键、指示灯、液晶屏进行初始化设置及程序中各变量定义,且使控制器在无事件触发累计10 min时进入休眠模式。在休眠模式下,除低频晶振的振荡器保持活动外,其余器件全被关闭,电流仅约为1 μA(“活动模式”下电流约为400 μA),当有按键和通信触发时,睡眠唤醒时间不超过6 μs。本文重点介绍按键中断服务程序和通信中断服务程序。
2.1 按键中断服务程序
液压支架控制器的20个按键分为动作键和功能键。当按键动作发生后,如果控制器休眠则被唤醒,之后进入按键中断服务程序。为了避免程序响应同等优先级的中断请求,进入中断服务程序后首先关闭按键中断,并将用于控制器休眠的全局变量InterTimer置0。然后使用函数ZLG7290_GetKey()读取按键键值,使用函数ZLG7290_GetRepeatCnt()读取连击计数器的值,从而判断“长按”与“短按”,使用函数ZLG7290_SegOnOff()点亮或熄灭指示灯。S5键(Shift)和S8键(Ctrl)用于复用其他按键,“长按”时将对应的标志位ShiftFlag和CtrlFlag取反,“短按”则不产生作用。S9/S10键代表升/降柱,S11/S12键代表平衡伸/收。ShiftFlag为0时,S13/S14键代表前梁伸/收,S15/S16键代表一级护帮伸/收,S17/S18键代表侧护伸/收,S19/S20键代表推溜/移架;ShiftFlag为1时,S13/S14键代表抬底伸/收,S15/S16键代表二级护帮伸/收,S17/S18键代表尾梁伸/收,S19/S20键代表插板伸/收。CtrlFlag为0时,S1/S2/S3/S4/S6/S7键用于选架;CtrlFlag为1时,S1/S2/S3/S4/S6/S7键具有菜单功能。键值处理完后,将对应动作指令发送给驱动器以驱动电磁阀动作,并点亮相应指示灯。为提高控制器的人机交互性能,每个按键按下时,需要点亮对应指示灯,松开时则熄灭。本次按键事件处理完后,将中断打开并返回,为下一次中断事件做准备。具体流程如图4所示。
2.2 通信中断服务程序
与按键中断服务类似,进入通信中断服务程序后也要关闭相应中断,并将全局变量InterTimer置0。控制器在收到数据后进行校验,如果校验错误则在液晶屏上显示错误信息,如果校验正确则根据通信协议分析指令内容,更新控制器内部的支架状态表及参数表,并将关键信息显示在液晶屏上。处理完成后打开通信中断并返回。通信中断服务程序流程如图5所示。
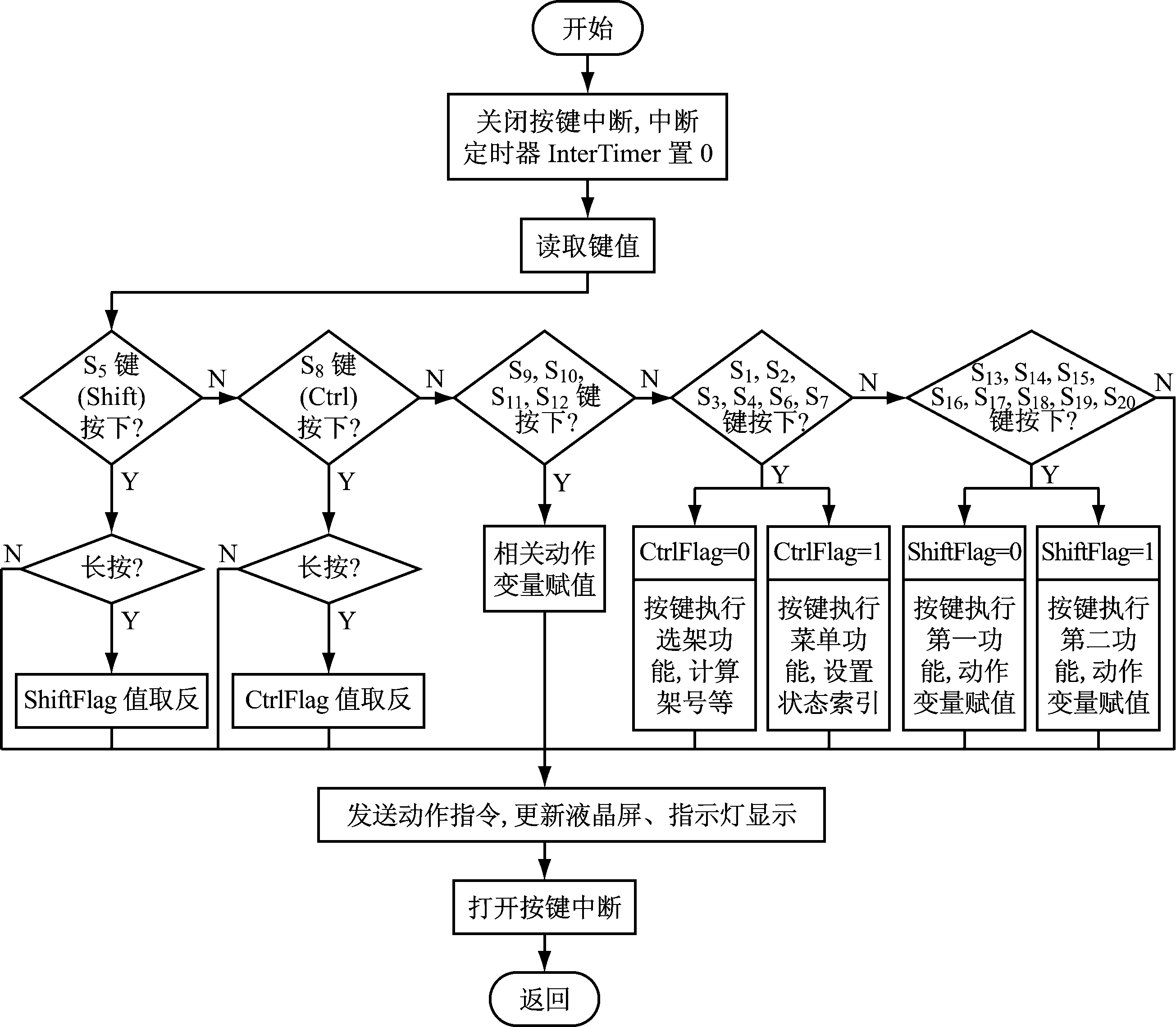
图4 按键中断服务程序流程
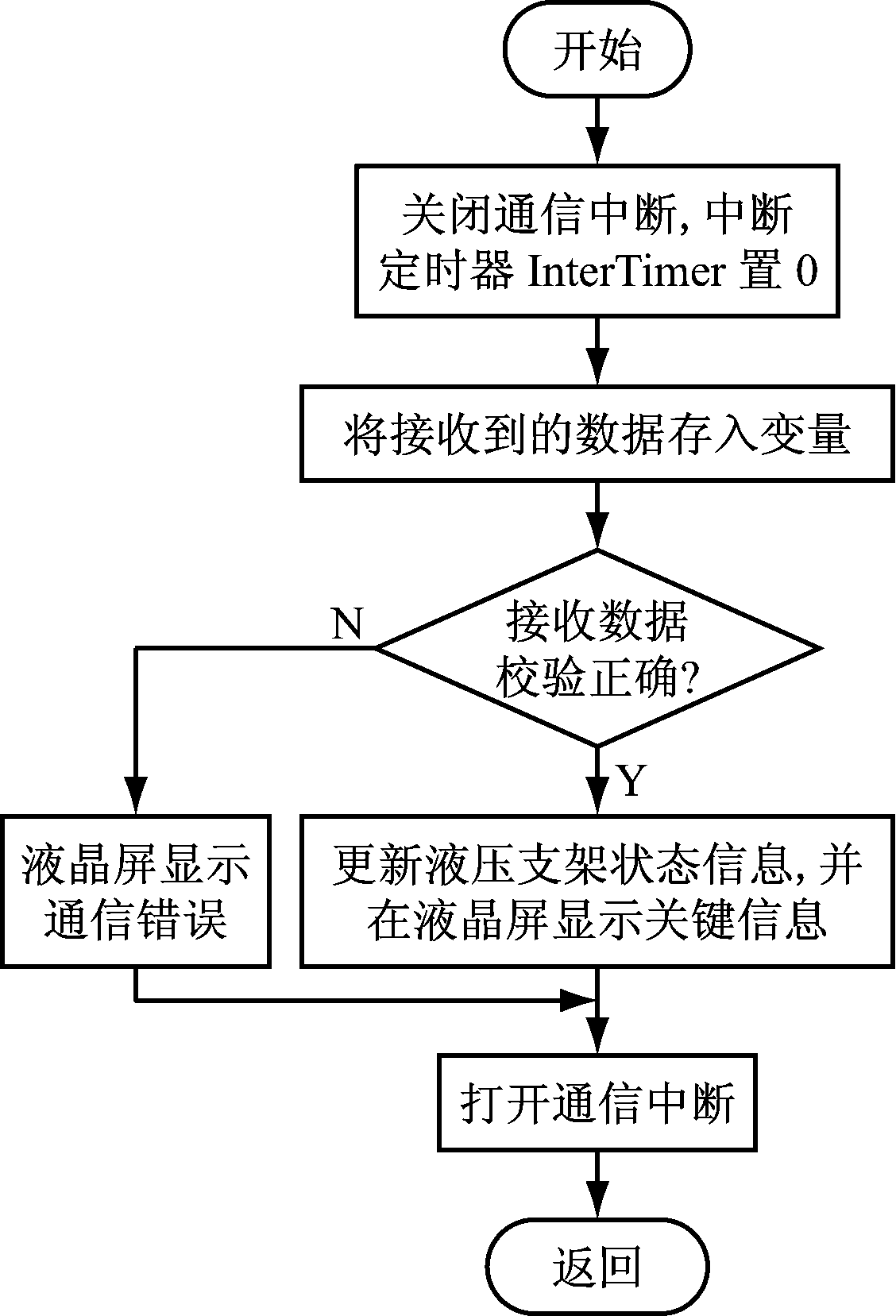
图5 通信中断服务程序流程
制作了无线液压支架控制器样机,并在6台液压支架和6套模拟测试箱组成的系统上进行了测试,如图6所示。经过测试,该控制器可以实现对本架部分动作控制(考虑安全因素,不允许对本架进行升/降柱、推溜/移架控制)、相邻5架所有动作的控制、支架成组动作,还可设置架号、控制范围、动作持续时间等参数。相邻第5台液压支架的动作响应时间为500 ms。

图6 实物测试
完成控制器基本功能调试后,利用专用软件进行了控制器无线通信误码率测试,结果如图7所示。

图7 液压支架控制器无线通信误码率测试结果
无线通信速率为115 200 bit/s,8位数据位,无校验位,1位停止位,测试距离为25 m,发送400 000 128个数据位,错误接收位为0,误码率为0。控制器待机功耗为10 mW,待机时间可达15 d以上。
应用无线液压支架控制器可以改善液压支架电液控制系统的人机交互性能,解决现有有线液压支架控制器成本高、适应性差的问题。无线液压支架控制器在硬件及软件设计过程中均采用低功耗设计思想,有效延长了控制器续航时间。经测试,该控制器能够实现单台液压支架动作控制及液压支架成组控制,且无线传输可靠,功耗较低。
参考文献:
[1] 李首滨.国产液压支架电液控制系统技术现状[J].煤炭科学技术,2010,38(1):53-56.
[2] 伍小杰,程尧,崔建民,等.液压支架电液控制系统设计[J].煤炭科学技术,2011,39(4):106-109.
[3] 蒋春悦,田慕琴,宋建成,等.自动化工作面液压支架控制器设计[J].工矿自动化,2014,40(9):1-5.
[4] 胡波.液压支架智能控制系统研究[D].太原:太原理工大学,2014.
[5] 王桃,刘晓文,乔欣,等.基于无线传感器网络的液压支架压力监测系统设计[J].工矿自动化,2014,40(6):7-10.
[6] 沈建华,杨艳琴.MSP430系列16位超低功耗单片机原理与实践[M].北京:北京航空航天大学出版社,2008.
[7] 洪利,章扬,李世宝.MSP430单片机原理与应用实例[M].北京:北京航空航天大学出版社,2010.
[8] 潘旭兵,林中.基于CC1100的无线手持终端的设计[J].电子技术应用,2007(10):29-33.
[9] 李健,姚顺才,米卫卫.基于CC1100的无线数据通信系统设计[J].电子测试,2013(增刊1):101-104.
[10] 蒋莉,冀春涛,沈华西.电阻焊控制系统中ZLG7290接口的实现[J].仪表技术与传感器,2012(2):90-92.
[11] 王丽芳,宋仁旺,闫晓梅.高集成度的矿灯电源管理电路[J].太原科技大学学报,2014,35(4):267-270.
[12] 程剑平,朱卓娅,魏同立.单节锂电池保护芯片的设计[J].电路与系统学报,2004,9(4):66-70.
[13] 赵传锋.模块化的综合性数字化仪的研究[D].洛阳:河南科技大学,2014.
[14] 谢楷,赵建.MSP430系列单片机系统工程设计与实践[M].北京:机械工业出版社,2009.
[15] 李智奇.MSP430系列超低功耗单片机原理与系统设计[M].西安:西安电子科技大学出版社,2008.
Design of wireless hydraulic support controller
GUO Feng1,2, NIU Yicun1,2
(1.China Coal Research Institute Co., Ltd., Beijing 100013, China;2.State Key Laboratory of Coal Resource Efficient Mining and Clean Utilization, Beijing 100013, China)
Abstract:For problems of wired hydraulic support controller in actual operation such as difficult wiring, vulnerability, limited operation range and so on, a wireless hydraulic support controller was designed. Hardware circuit design of the controller was introduced which was based on the controlling core of MSP430F149, and design scheme of the controller software based on event-triggered was expounded as well as key-press interrupt service program and communication interrupt service program. The test results show that the controller realizes single hydraulic support control, adjacent support control and united control. The data transmission rate of the controller is 115 200 bit/s, bit error rate is 0, controlling distance is 25 m, standby power consumption is 10 mW, and action response time of hydraulic support is no more than 500 ms.
Key words:coal mining; hydraulic support; hydraulic support controller; wireless transmission; adjacent support control; united control of support
文章编号:1671-251X(2017)06-0006-05
DOI:10.13272/j.issn.1671-251x.2017.06.002
收稿日期:2017-01-26;
修回日期:2017-03-20;责任编辑:李明。
基金项目:科研院所技术开发研究专项资金资助项目(2011EG122195)。
作者简介:郭峰(1983-),男,江苏徐州人,助理研究员,硕士,主要从事煤矿机械设备检测与自动化技术研发工作,E-mail:cumt333@163.com。
中图分类号:TD355.4
文献标志码:A 网络出版时间:2017-05-26 09:21
网络出版地址:http://kns.cnki.net/kcms/detail/32.1627.TP.20170526.0921.002.html
郭峰,牛一村.无线液压支架控制器设计[J].工矿自动化,2017,43(6):6-10.