图1 圆形六足探测机器人模型
蔡李花1, 方海峰1, 高进可1, 吴群彪1, 李允旺2
(1.江苏科技大学 苏州理工学院, 江苏 张家港 215600;2.中国矿业大学 机电工程学院, 江苏 徐州 221116)
摘要:为了适应煤矿井下复杂地形,设计了一种煤矿探测机器人行走机构:躯体为圆形,6条腿均布在躯体四周;躯体及腿部采用高强度铝合金材料,整机仅800 g。对该机器人直线行走步态、原地转向步态及其运动能力进行了分析。采用Solidworks和ADAMS软件建立了机器人仿真模型,对其进行仿真及样机试验,结果表明,机器人单次旋转动作的最大完成角度达24°,最多2次旋转操作即可完成任意角度转向;机器人直线行走时平均速度达0.1 m/s,其位移、速度及加速度变化较规律,运动较平稳,没有出现剧烈抖动。
关键词:煤矿救援; 救灾机器人; 探测机器人; 行走机构; 步态分析
煤矿井下发生瓦斯爆炸事故后,灾区气温升高,粉尘浓度增大,瓦斯及其他有毒气体积聚,随时可能发生二次爆炸或多次爆炸;巷道内设备错乱,顶板垮落堆积,地形崎岖不平;部分顶板不稳定,随时可能发生冒落。这给搜救工作带来很大的困难和危险,使得救援人员难以在第一时间进入事故现场开展侦察和救援任务,甚至造成救护人员伤亡[1]。为顺利开展灾后救援工作,提高救援效率,减少人员伤亡,迫切需要研发替代救援人员进入灾害现场进行环境探测和搜救工作的矿用机器人[2-3]。
采用机器人辅助进行瓦斯爆炸灾后环境探测工作,首先要求机器人能够适应矿井非结构地形,因此研究煤矿探测机器人行走机构是开发探测机器人的首要任务与重点。探测机器人行走机构应满足3个要求:① 具有较好的地形适应性和越障性能,可进入灾区;② 具有防爆性能;③ 可为通信检测装置提供载体。要求①是探测机器人进行井下救援工作的基本条件,是制约探测机器人井下应用的技术瓶颈,也是探测机器人研发的技术难点与关键[4-5];要求②、③是对要求①的制约。
现阶段煤矿探测机器人大多采用履带式结构,虽然具有较好的越障能力,但受限于其驱动方式与机械结构,无法做得很小,也不能在倾覆后自动校正[6-8]。近年来蜘蛛型、蛇型、土拨鼠型、昆虫型等仿生机器人得到大力发展,其具有极强的地形适应能力,且体积小、运动速度快[9-10]。多足仿生机器人与采用轮子、履带等方式移动的机器人相比,可以越过不规则、松软的地形而保持机体稳定,可以跨越障碍物、壕沟和楼梯,可以全方位移动[11-13]。研究多足仿生机器人对煤矿灾害救援具有重要的现实意义[14-15]。
为进一步提高煤矿探测机器人的运动性能,本文设计了一种圆形六足结构的探测机器人行走机构,研究了探测机器人行走步态,并对其运动能力进行了分析及验证。
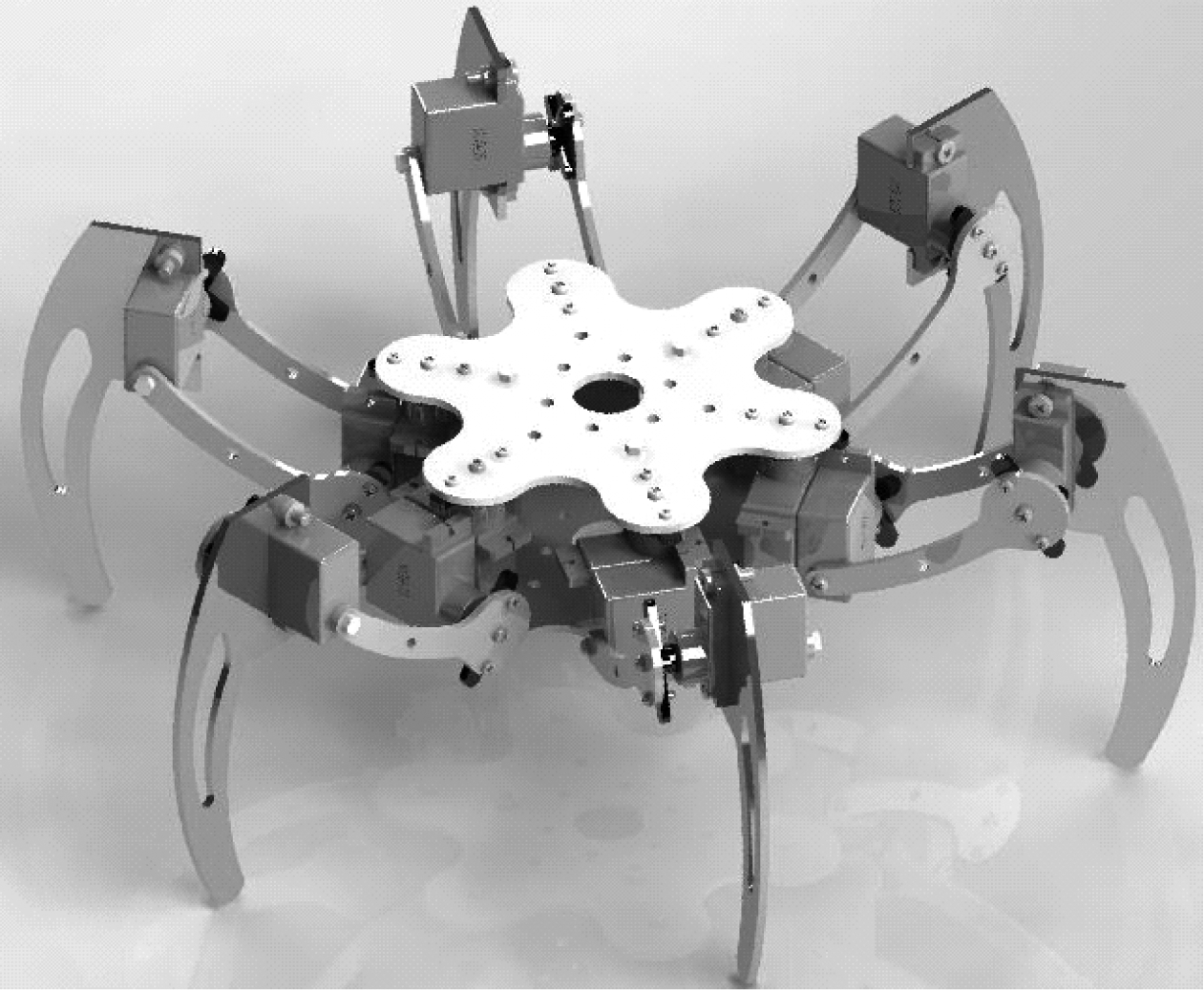
考虑到探测机器人运动时的转向问题,将六足机器人躯体设计为圆形,并将躯体与腿部的连接部分延长,使机器人腿部获得更大的运动空间。为提高探测机器人的灵活性并降低其功耗,在舵机有足够旋转空间且互不影响的前提下,尽可能使机器人结构紧凑。
圆形六足探测机器人的6条腿均布于圆形躯体周围,通过髋关节舵机与躯体连接,相邻2条腿之间夹角为60°;各腿结构相同,均由上支腿和下支腿通过膝关节舵机连接组成。腿部及躯体均选用密度较小的1060高强度铝合金,大大减小了整机质量,有利于提高机器人行走速度。采用Solidworks对探测机器人建模,如图1所示。
图1 圆形六足探测机器人模型
圆形六足探测机器人实物如图2所示。其机械结构质量约为550 g,电路板为150 g,电池为100 g,总质量仅约800 g,较为轻便。
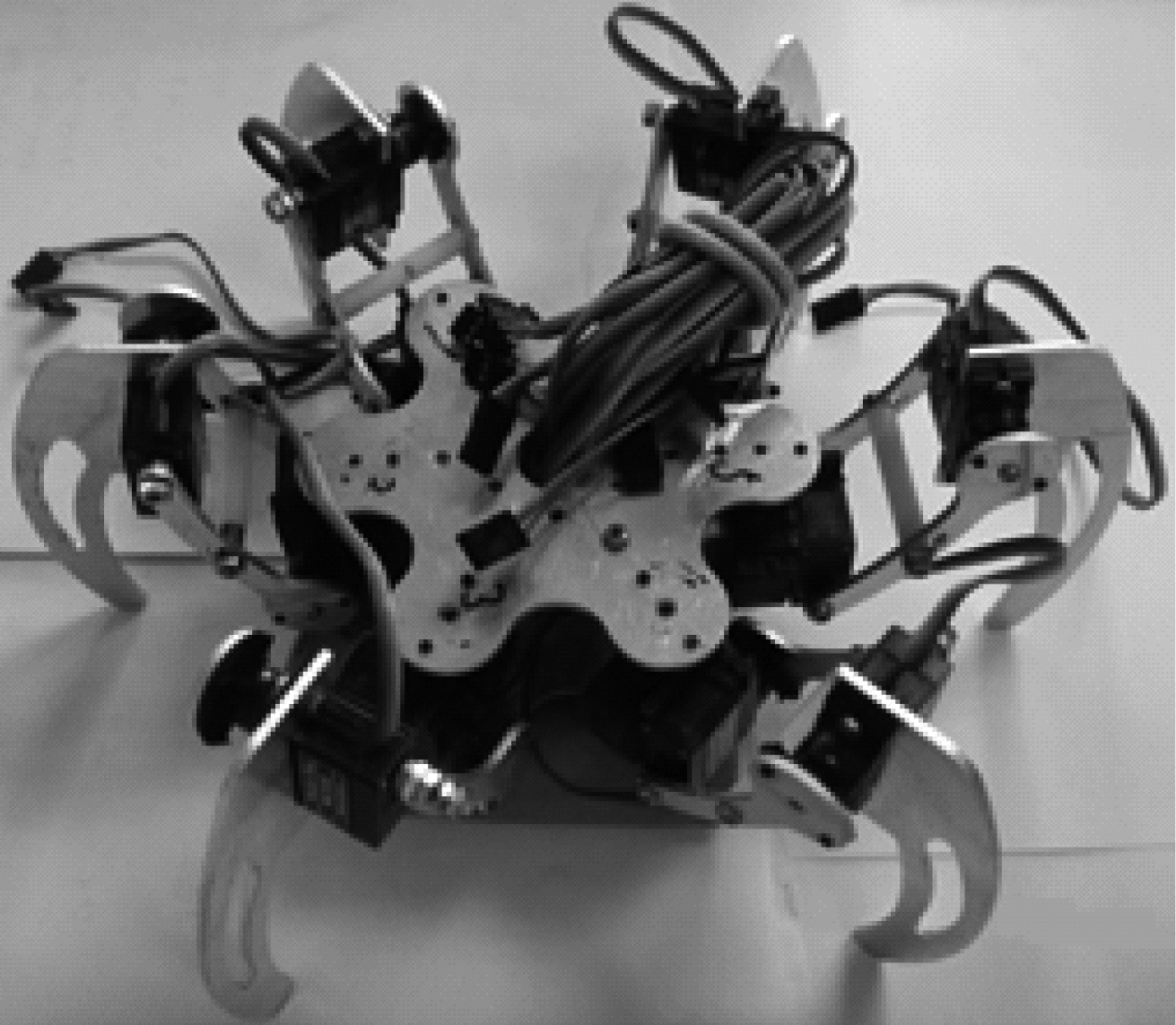
图2 圆形六足探测机器人实物
2.1 直线行走步态
圆形六足探测机器人直线行走步态分析如图3所示。机器人的6条腿按顺时针方向标记为1,2,…,6。考虑到机器人行走时的稳定性及重心等因素,将1,3,5号腿分为A组,2,4,6号腿分为B组。图3中每个行走步态包括机器人整体的俯视示意和2组腿的摆角示意。图3(a)—图3(f)依次为圆形六足探测机器人直线前进的1个周期步态分解。其中图3(a)为六足初始状态,上支腿与竖直方向呈30°,下支腿垂直于地面;图3(b)为六足前进的预备动作状态,A组各条腿抬起,表现为下支腿与竖直方向呈30°,3,5号腿的髋关节旋转30°;图3(c)为六足前进的定位动作状态,1号腿的股关节和膝关节相互配合,2个关节的旋转角度直接决定六足行进的距离,3,5号腿膝关节旋转,使得上支腿接触地面;图3(d)为六足调整躯体的预备动作状态,此时A组各条腿已经就位,能支持机器人躯体,B组各条腿的膝关节旋转,使得上支腿离开地面;图3(e)为六足前进动作状态,调整A组各条腿的髋关节角度,使躯体和腿部的角度恢复到初始状态,同时1号腿的股关节和膝关节调整角度,使上支腿与竖直方向呈30°,下支腿垂直于地面;图3(f)为六足恢复初始状态,将B组各条腿的膝关节调整到初始状态,并为下一周期的前进做准备。
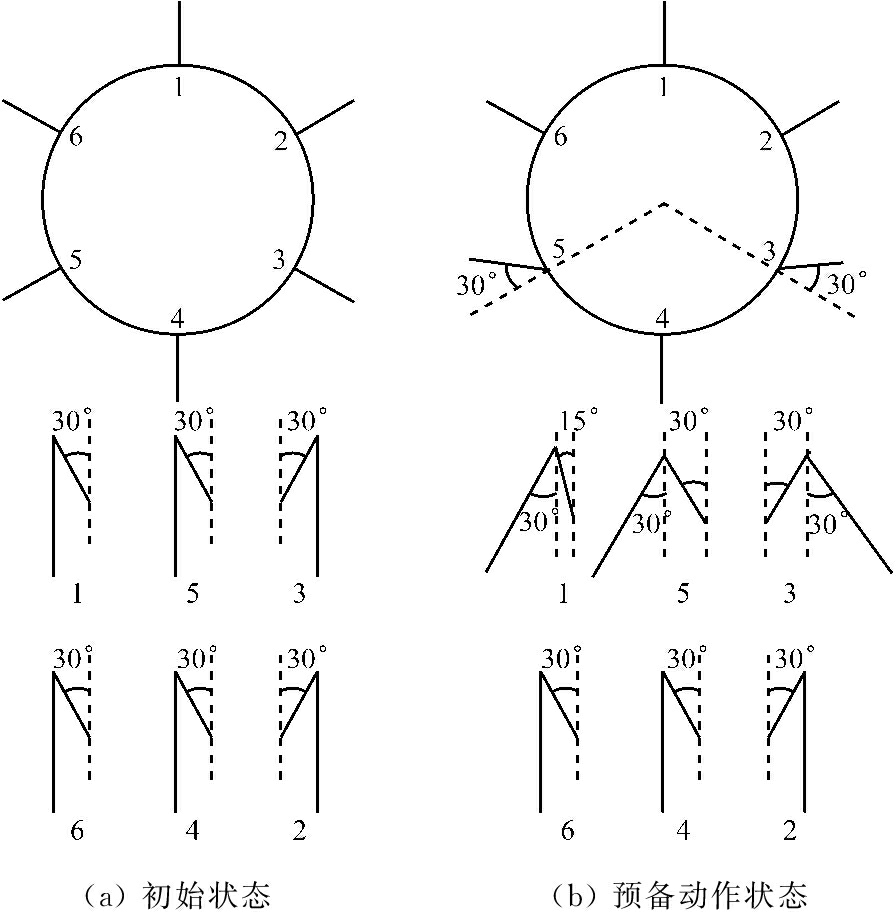
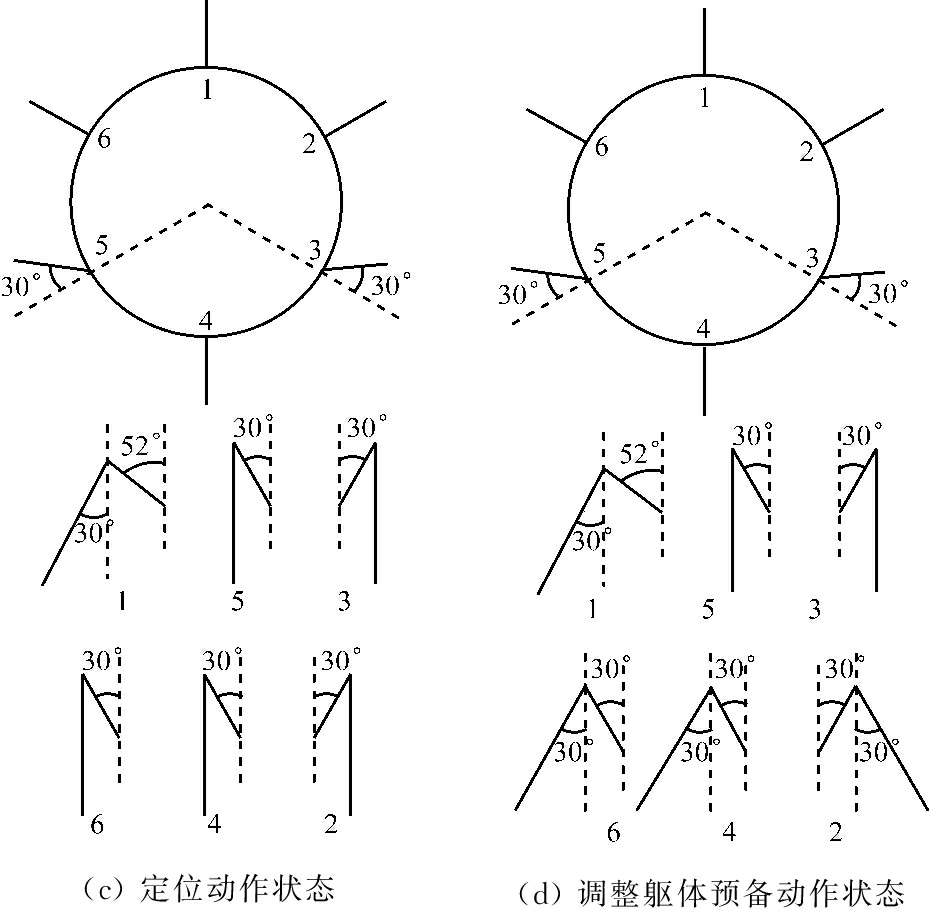
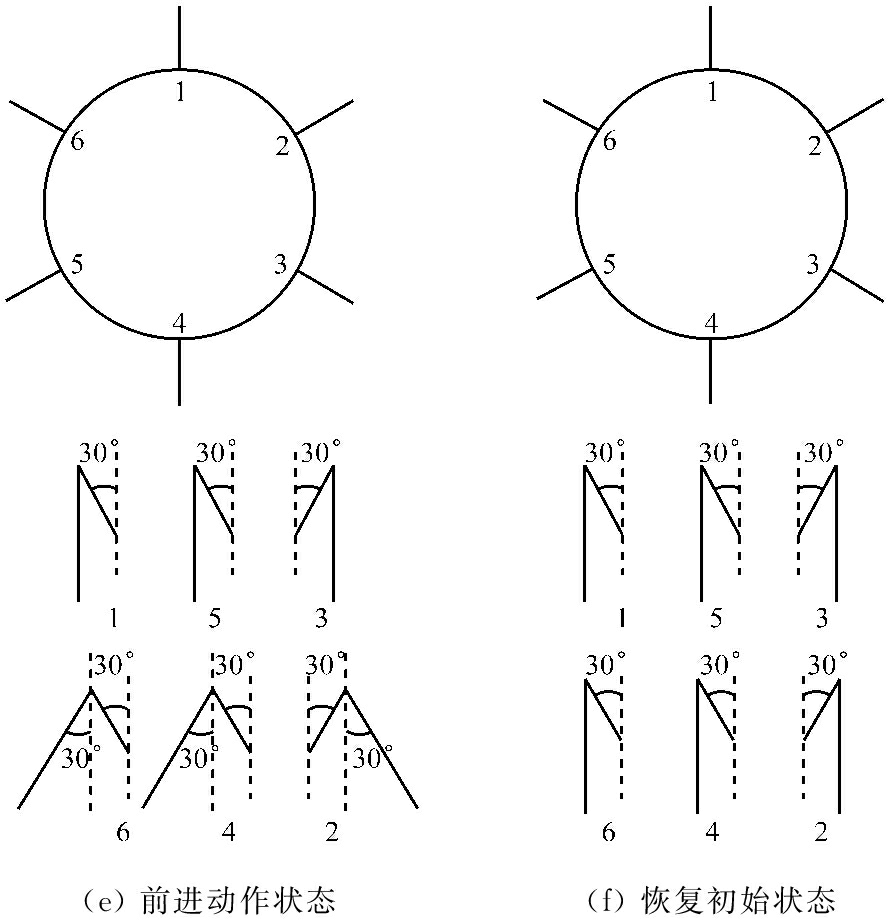
图3 圆形六足探测机器人直线行走步态分析
2.2 原地转向步态
以圆形六足探测机器人原地旋转15°为例,分析机器人行走步态,如图4所示。其中图4(a)为六足初始状态,上支腿与竖直方向呈30°,下支腿垂直于地面;图4(b)为六足旋转准备状态,A组各条腿抬起,表现为下支腿与竖直方向呈30°;图4(c)为六足旋转状态,A组各条腿的髋关节旋转55°;图4(d)为六足恢复初始状态的准备阶段,A组各条腿的膝关节恢复初始状态,接触地面,做好下次运行准备;图4(e)为六足旋转准备状态,B组各条腿抬起,表现为下支腿与竖直方向呈30°;图4(f)为六足旋转状态,B组各条腿的髋关节旋转55°;图4(g)为六足恢复初始状态的准备阶段,B组各条腿的膝关节恢复初始状态,接触地面,做好下次运行准备;图4(h)为六足恢复初始状态,六足的整个髋关节配合旋转一定角度。
2.3 运动能力
圆形六足探测机器人的最大跨度受地形和结构参数的影响,直线行走达到最大跨度时腿部姿态如图5所示。其中L1为机器人上支腿长度,L2为下支腿长度,R为初始状态跨度,Rmax为最大跨度。经测量知L1=55 mm,L2=105 mm,由勾股定理可知Rmax=[(L1+L2)2-(L2-L1sin 30°)2]1/2≈149.4 mm。
3.1 仿真试验
基于分形插值与三次样条插值运算方法,在ADAMS软件中模拟三维地形,进而模拟灾后井下巷道环境,如图6所示。
将Solidworks中建立的圆形六足探测机器人模型导入模拟灾后巷道,并采用 ADAMS/View约束库中的运动副来约束仿真模型中各部件的运动。基于机器人步态分析(图3、图4),设置机器人各舵机转角及时序,对机器人直线行走及原地转向进行动作仿真。通过ADAMS 后处理模块可观察到整个仿真过程。仿真结果表明,该机器人能够顺利完成直线行走及原地转向动作,单次旋转动作的最大完成角度达24°。由于机器人具有独特的圆形对称体型,任意2条腿间角度为60°,所以任意角度都可以转换为60°内进行处理,使机器人旋转到任意指定位置可通过最多2次旋转操作完成,极大地简化了原地转向操作,提高了机器人的运动能力。
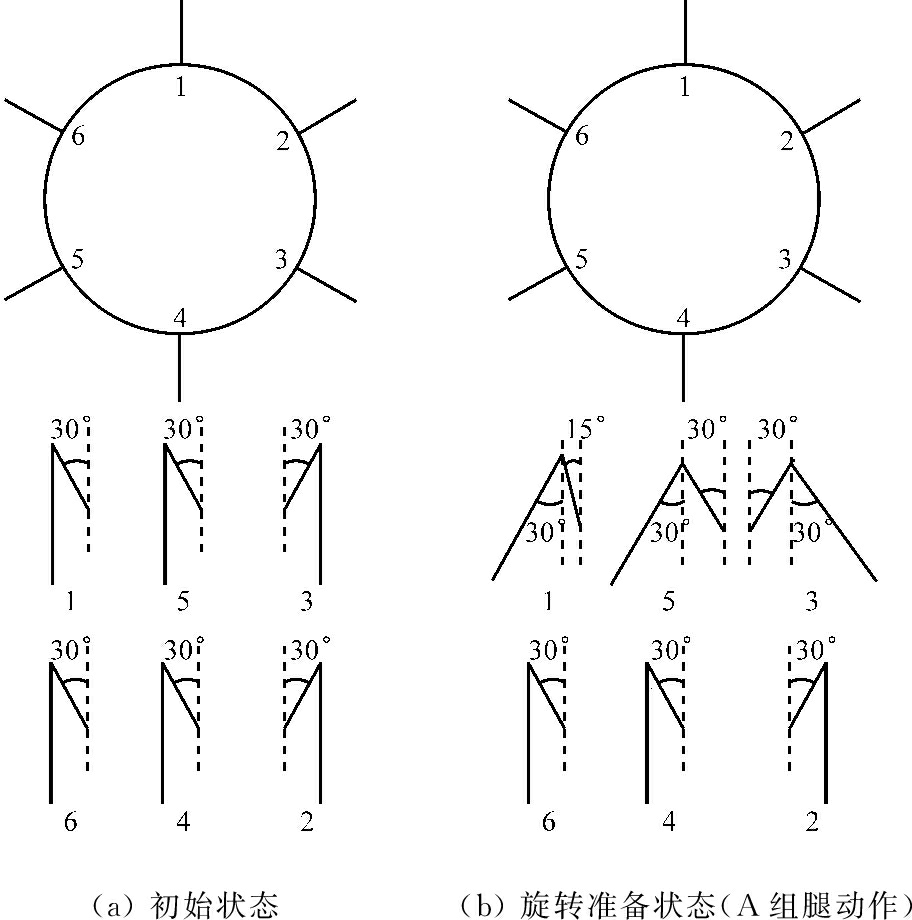
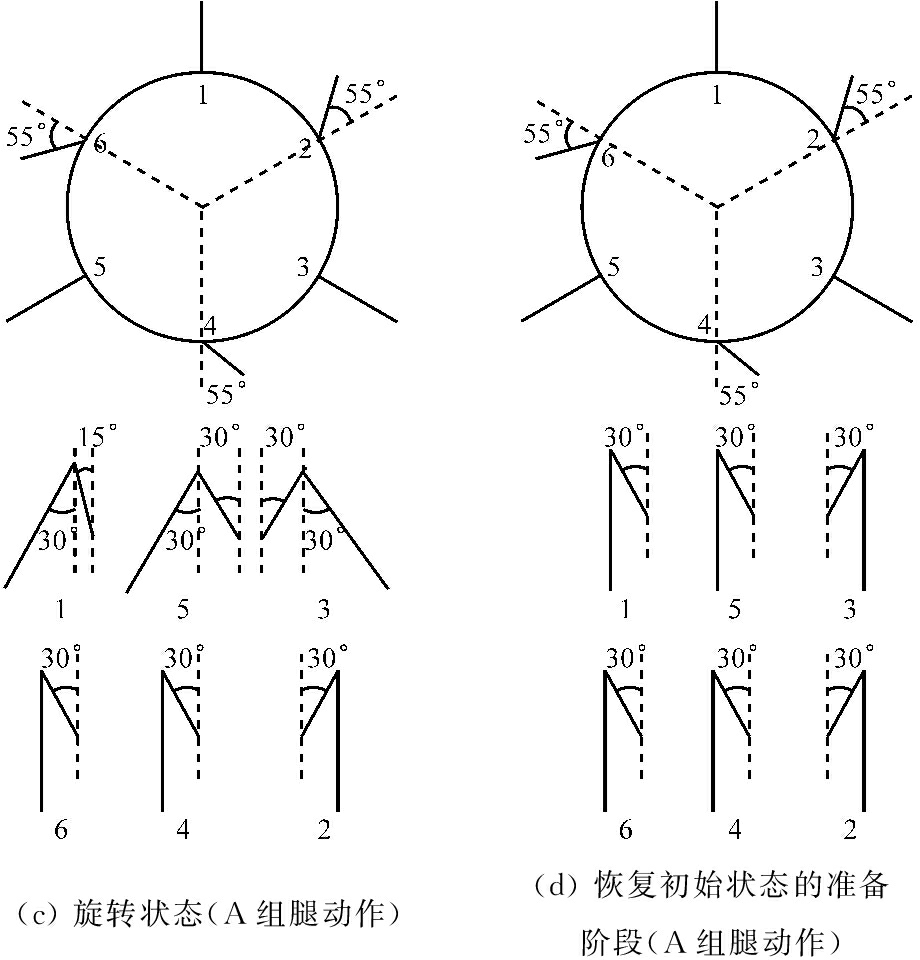
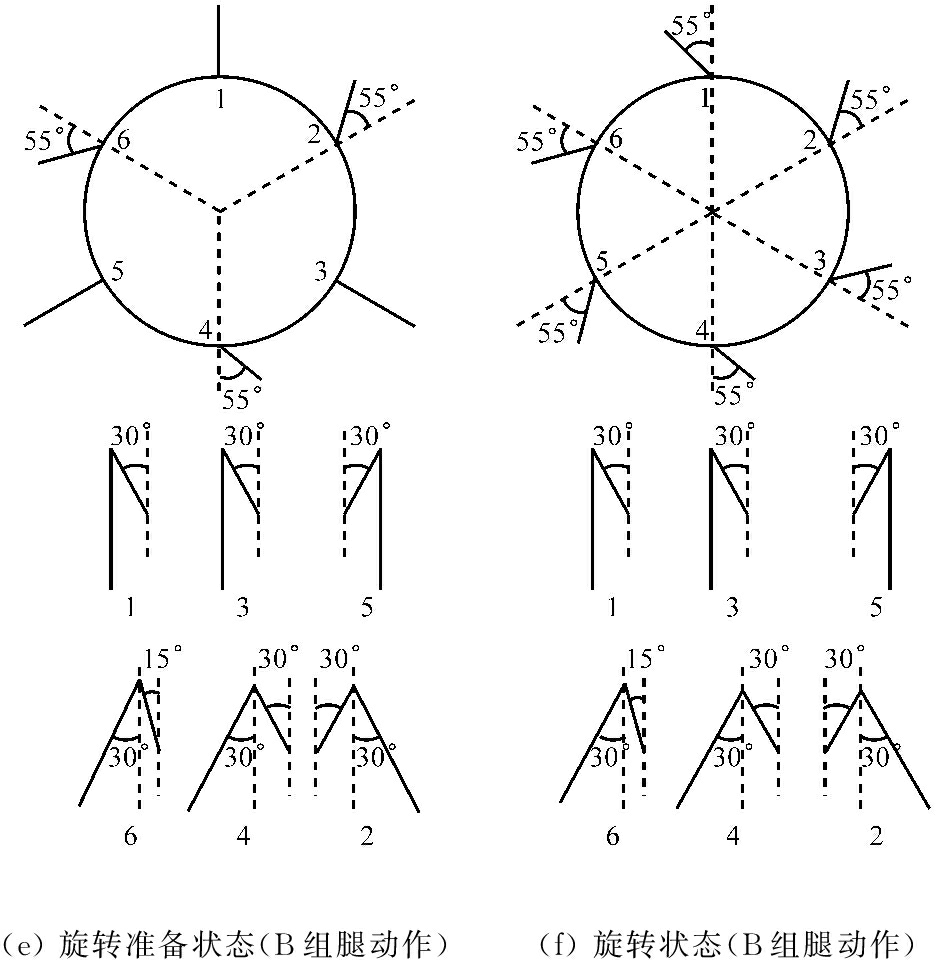
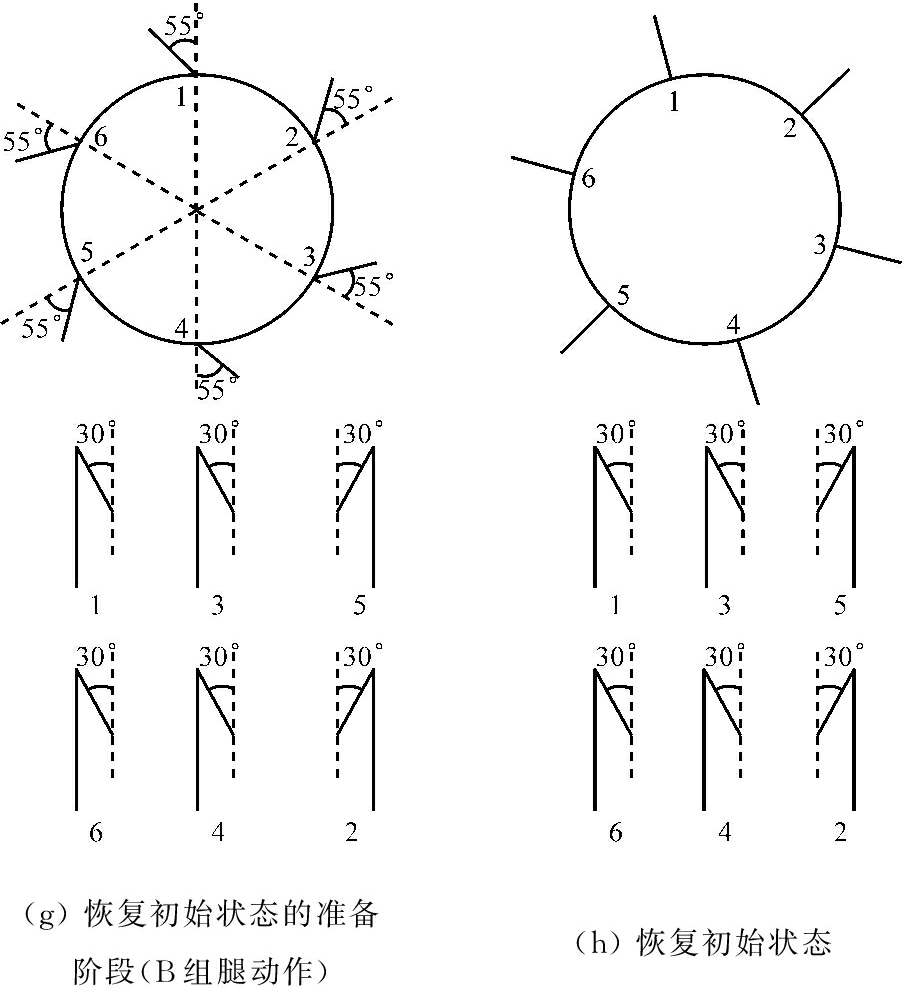
图4 原地转向步态分析
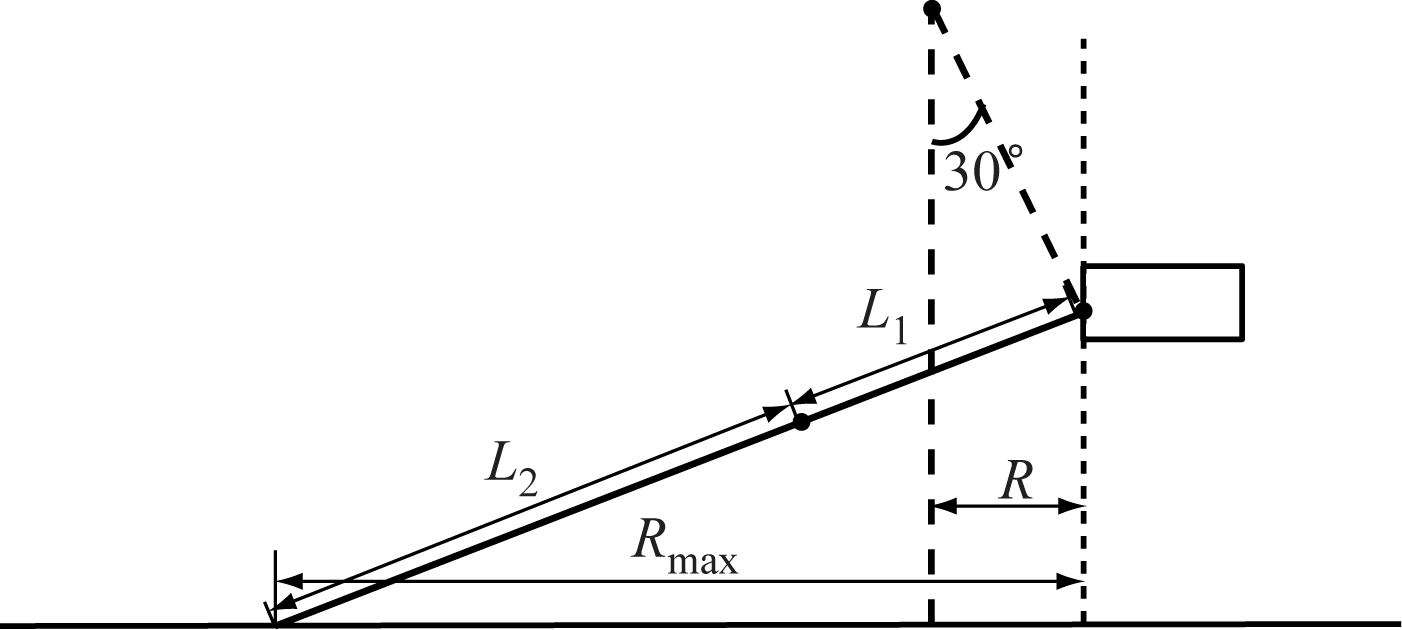
图5 探测机器人直线行走达到最大跨度时腿部姿态
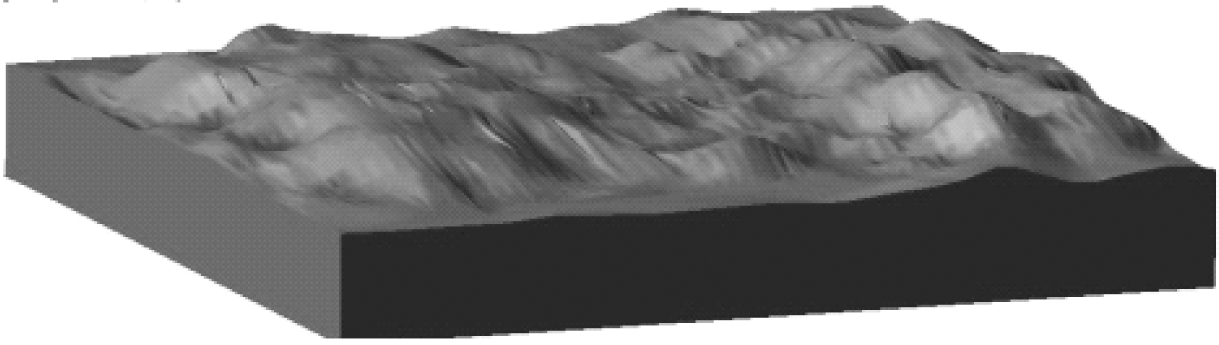
(a) 三维模拟地形
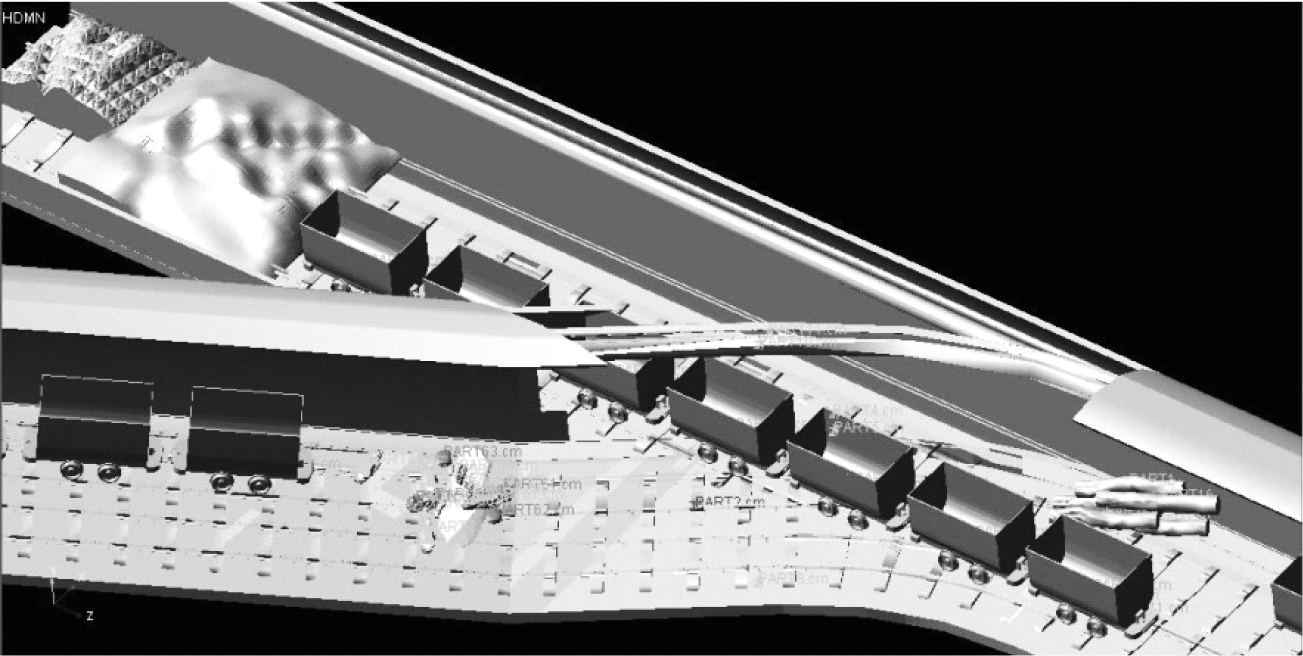
(b) 模拟灾后巷道
图6 仿真试验模型
3.2 样机试验
为进一步验证圆形六足探测机器人步态分析的正确性及其行走机构的运动能力,将机器人样机置于实验室环境进行试验,并采用OPTOTRAK CERTUS三维姿态捕捉系统捕捉机器人行走时的三维姿态。以机器人直线行走步态试验为例进行分析。在机器人躯体中心处设置标记点,得到该点沿行走方向的位移、速度及加速度曲线,如图7所示。可看出机器人平均速度达0.1 m/s,其位移、速度及加速度变化较规律,运动较平稳,没有出现剧烈抖动现象;当机器人足端与地面碰撞时,发生轻微摆动和震动。
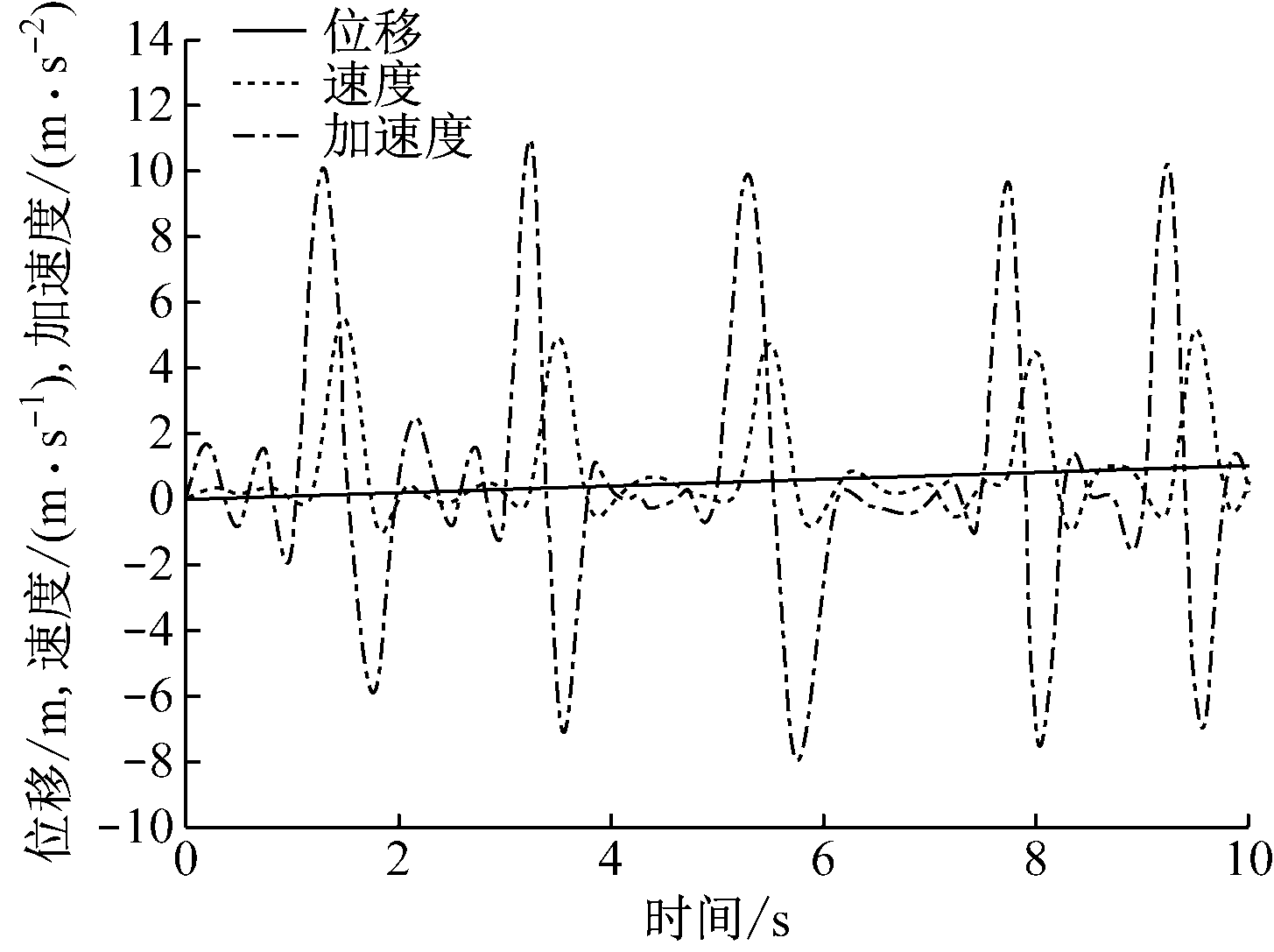
图7 机器人标记点运动参数曲线
(1) 为适应煤矿井下瓦斯爆炸灾后复杂地形,设计了探测机器人行走机构:躯体为圆形,6条腿均布在躯体四周;机器人躯体及腿部均采用高强度铝合金材料,样机质量仅800 g。
(2) 采用Solidworks和ADAMS建立了机器人仿真模型,并对机器人直线行走和原地转向运动进行了仿真,结果表明该机器人可以顺利完成直线行走及原地转向动作,单次旋转动作的最大完成角度达24°,即最多进行2次旋转操作即可使机器人转到任意指定角度。
(3) 对机器人样机进行了直线行走试验,得到机器人躯体中心沿行走方向的位移、速度及加速度曲线。结果表明,机器人平均速度达0.1 m/s,其位移、速度及加速度变化较规律,运动较平稳,没有出现剧烈抖动现象。
参考文献:
[1] 方海峰,张礼华,李允旺,等.煤矿灾后环境下机器人能耗模型研究[J].工矿自动化,2015,41(2):21-24.
[2] 张祖敬,刘林,王克全.矿山应急救援人员自身伤亡原因及应对策略[J].中国煤炭,2016,42(1):88-91.
[3] 田子建,高学浩.基于改进人工势场法的救灾机器人路径规划[J].工矿自动化,2016,42(9):37-42.
[4] 魏毅龙.煤矿井下探测与搜救机器人机械系统设计与研究[D].徐州:中国矿业大学,2014.
[5] 李腾,杨雪锋,路恩,等.四段式轮-履结合煤矿井下探测机器人结构设计及越障分析[J].煤矿安全, 2016,47(12):117-121.
[6] 由韶泽,朱华,赵勇,等.煤矿救灾机器人研究现状及发展方向[J].工矿自动化,2017,43(4):14-18.
[7] LI Yunwang, GE Shirong, TIAN Feng. Analysis and test on rough terrain adaptation performance of the rocker-type w-shaped track coal mine exploring robot[J]. Information Technology Journal, 2013,12(14): 2921-2928
[8] LI Yunwang, YAN Xucong, TIAN Feng, Analysis and test on step surmounting performance on a w-shaped track robot[J]. Open Automation and Control Systems Journal, 2015,7(1):74-83.
[9] 冯勇.仿土拨鼠矿难救灾机器人控制系统关键技术研究[D].合肥:中国科学技术大学,2012.
[10] 朱斌,雷利伟,贾瑞清.煤矿探测救援机器人研究现状及其应用[J].机电产品开发与创新,2013,26(6):14-16.
[11] 苏学满,孙丽丽,许德章.六足矿井搜救探测机器人越障动力学建模与分析[J].机械设计,2016,33(2): 100-104.
[12] 金振林,张金柱,高峰.一种消防六足机器人及其腿部机构运动学分析[J].中国机械工程,2016,27(7): 865-871.
[13] 王国彪,陈殿生,陈科位,等.仿生机器人研究现状与发展趋势[J].机械工程学报,2015,51(13):27-44.
[14] 刘建.矿用救援机器人关键技术研究[D].徐州:中国矿业大学,2014.
[15] 贾阿丽.救灾搜索机器人的关键技术设计与实现[J].山西大同大学学报,2016,32(6): 27-35.
Moving mechanism design of mine-used detection robot and its gait analysis
CAI Lihua1, FANG Haifeng1, GAO Jinke1, WU Qunbiao1, LI Yunwang2
(1.Suzhou Institute of Technology, Jiangsu University of Science and Technology,Zhangjiagang 215600, China; 2.School of Mechanical and Electrical Engineering,China University of Mining and Technology, Xuzhou 221116, China)
Abstract:In order to adapt to complex terrain in coal mine underground, a moving mechanism of mine-used detection robot was designed. The robot has a circular body, and its 6 legs are uniformly distributed around the body. The body and legs are processed by use of high strength aluminum alloy material, and quality of the robot prototype is only 800 g. Straight line walking gait, turning point gait and motion ability of the robot were analyzed. A simulation model of the robot was built by use of Solidworks and ADAMS software, and the model and prototype were tested. The test results show that the maximum implementation angle of the robot is 24° in once rotation. Thus the robot can complete rotation with any degree in twice rotation. Average speed of the robot is 0.1 m/s in straight link walking, and displacement, velocity and acceleration changes regularly. The robot moves smoothly without obvious jitter.
Key words:coal mine rescue; disaster rescue robot; detection robot; moving mechanism; gait analysis
文章编号:1671-251X(2017)06-0047-05
DOI:10.13272/j.issn.1671-251x.2017.06.011
收稿日期:2017-01-21;
修回日期:2017-04-20;责任编辑:李明。
基金项目:国家自然科学基金资助项目(51205391);江苏省普通高校自然科学研究项目(14KJD440001);江苏科技大学青年科研基金资助项目(635271205)。
作者简介:蔡李花(1984-),女,江苏启东人,讲师,博士,研究方向为机器人技术、机电系统设计,E-mail:justcailihua@163.com。
中图分类号:TD67
文献标志码:A 网络出版时间:2017-05-26 09:51
网络出版地址:http://kns.cnki.net/kcms/detail/32.1627.TP.20170526.0951.011.html
蔡李花,方海峰,高进可,等.煤矿探测机器人行走机构设计与步态分析[J].工矿自动化,2017,43(6):47-51.