罗明华
(中煤科工集团重庆研究院有限公司, 重庆 400039)
摘要:针对强力输送带由于抖动、跑偏、速度变化等导致的接头抽动计算不准确问题,提出了一种基于接头图像配准的抽动检测方法。对二次采集的接头图像进行配准,用Y差分法定位配准图像中的接头点,计算所有接头点的距离并与参考图像比对,得出接头抽动距离,根据抽动距离可得到所有接头的变化趋势。实验结果表明,该方法检测精度高,可满足实际应用要求。
关键词:强力输送带; 接头抽动; 图像配准; Y差分法; 抽动距离
钢丝绳芯带式输送机是矿井生产中主要的运输设备,具有运速高、运距长、运载量大、易实现自动化控制等优点。输送带作为输送机的重要组成部分[1-2],当输送带强度下降到一定限度后就会造成重大断带事故,严重影响安全生产。目前对输送带进行检测的主流方法有磁感应检测法[3-4] 、视觉检测方法[5]、X射线检测法[6]。输送带接头是整条输送带中抗拉强度最低、最为薄弱的环节,就现有煤炭企业中钢绳芯输送带断裂事故来看,大多数是由于接头抽动未被及时发现而造成的[7]。因此,通过X射线检测法准确检测钢绳芯输送带接头抽动情况并预测其强度尤为重要。
焦晋杰等[8]采用查集算法进行连通域合并,自动检测所有对接头长度。樊荣等[9]采用Y差分法进行接头检测,将检测距离与标准对接头距离进行比较,得出抽动距离。但他们都没考虑实际情况中输送带的速度变化、抖动和跑偏会导致二次采集的同一接头图像发生平移、伸缩等变形。鉴此,本文提出了一种强力输送带接头抽动检测方法,首先通过一系列算法规则化接头图像,然后通过差分法消除孤立点和定位接头点,最后计算接头抽动距离,进而得到接头的抽动趋势。
为消除由于输送带抖动、跑偏、速度变化等引起的接头图像几何形变,获取具有几何一致性的2幅接头图像,首先对待检测图像进行配准[10]。
文献[11] 根据归一化积相关算法筛选出完整的接头图像,然后采用Harris角点检测[12]及特征描述相关算法,识别出每个接头,并找到当前接头与参考接头的匹配点,下一步就需要根据匹配点计算图像间的空间变换模型参数。本文采用6参数的仿射变换模型来描述图像间的几何变换关系。
仿射变换的特点:变换是线性的,经过仿射变换的直线仍然是直线,可以表示平移、旋转、缩放等运动。变换公式为
(1)
式中![]() 为当前接头图像特征点坐标;
为当前接头图像特征点坐标;![]() 为参考接头图像与
为参考接头图像与![]() 对应的特征点坐标;
对应的特征点坐标;![]() 为2×2标准矩阵;
为2×2标准矩阵;![]() 为二维向量。
为二维向量。
假设经过特征点匹配后得到N对正确匹配点对,则矩阵H可表示为
(2)
由最小二乘法可计算反向仿射变换参数a—f的最小二乘估计![]()
(3)
(4)
对配准结果图中的每个像素点,逐一利用反向仿射变换参数计算其在待配准图像中的对应像素点坐标。但配准结果图与待配准图像的各像素点之间没有一一对应关系,因为通过反向仿射变换得到的像素点坐标可能含有小数,所以,需采用插值方法解决该问题。本文采用常见的双线性插值算法,利用4个邻近点的灰度值加权平均得到插值点灰度值。规则化后的图像如图1所示。
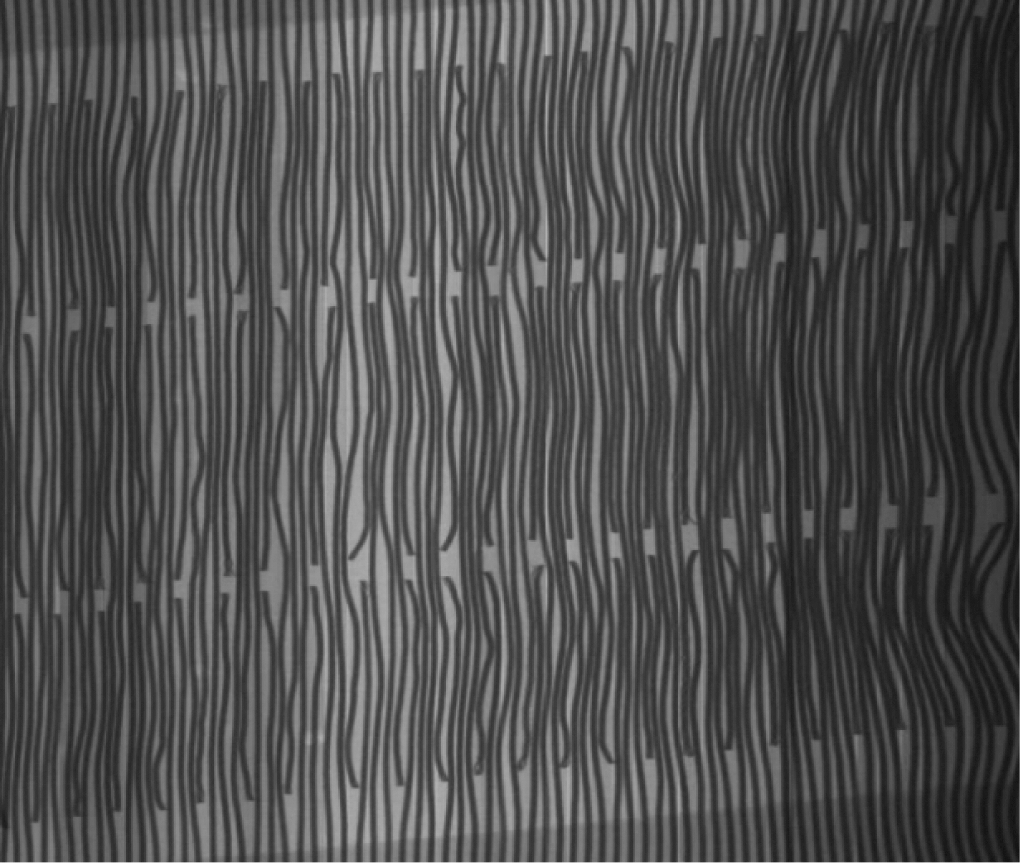
图1 规则化后图像
2.1 差分法
文献[4]利用Y差分法检测接头点,但在实际应用中,如果仅用2个邻域点灰度进行差分来分割图像,很容易受噪声影响。因此,本文采用3个相邻像素点灰度作平均,再进行X和Y方向差分。差分法如图2所示,其中Pc为中心像素的灰度值,Pi为其八邻域灰度值(i=1,2,…,8)。
图2 差分法
X方向差分记为DX,Y方向差分记为DY:
DX=(P1+P8+P7)/3-(P2+Pc+P6)/3
(5)
DY=(P5+P6+P7)/3-(P4+Pc+P8)/3
(6)
中心像素的灰度值计算公式为
(7)
式中r1和r2为分割阈值,由具体的接头图像灰度来确定,如果接头图像对比度较大,则阈值可选取较大值,本文中r1取20,r2取10。
2.2 孤立点消除
对接头进行分割后,还存在很多面积较小的噪声孤立点,需要将这些孤立点消除。消除孤立点的方法很多,如可以进行5×5的中值滤波处理,但是有时接头点面积也较小,被当作孤立点消除了。通过观察接头点像素分布,只需对孤立点X方向进行滤波处理就行了。设P1,P2,P3,P4为X方向上连续的4个像素点,g(P)表示灰度值。如果g(P1)=g(P4)=0且g(P2)>0,g(P3)>0,则g(P2)=g(P3)=0。如果g(P1)=g(P3)=0且g(P2)>0,则g(P2)=0。
某个接头点的差分分割图像消除孤立像素点后的结果如图3所示。
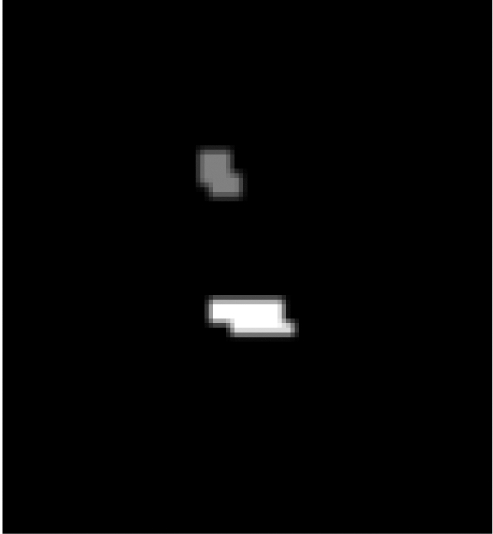
(a) 孤立点消除前 (b) 孤立点消除后
图3 某个接头点消除孤立点后的结果
2.3 对接头距离计算
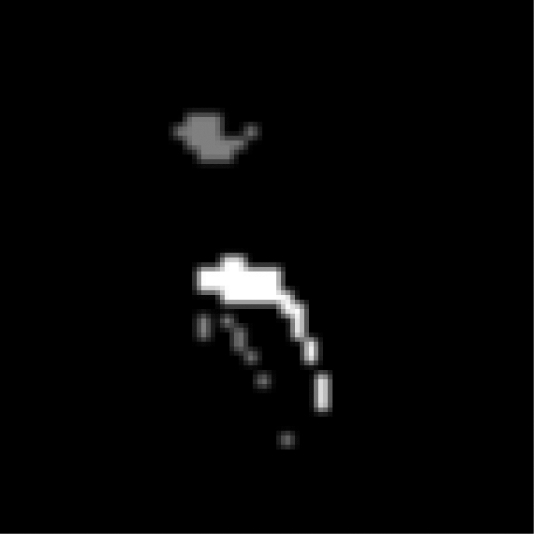
对图像进行分割并消除孤立点后,得到上下接头区域,接头差分图像如图4所示。
图4 接头差分图像
利用轮廓跟踪算法可得到上下接头区域中心点坐标,上下接头点由其灰度值区分,上接头点灰度值为128,下接头点灰度值为255。上下接头区域中心点距离即为对接头距离。上接头记为U(xi,yi),下接头记为D(xj,yj)。
如果满足以下空间距离约束条件,则认为对应2个接头点匹配:
(8)
(9)
式中σx和σy为2个阈值,由具体应用中的对接头空间位置来决定,σx略大于上下接头点间的横向平均距离,σy大于上下接头点间的纵向平均距离。
接头间的距离d表示为
(10)
式中W为像素间距,由探测器精度决定,此处为1.6 mm。
2.4 接头抽动计算
通过接头图像配准,获得了具有几何一致性的基准接头图像和待检测接头图像,通过以下步骤即可精确计算出所有对接头抽动距离。
(1) 获取基准接头图像与待检测接头图像重叠区域。
(2) 定义空间约束条件,符合约束范围的则认为是同一个对接头。
(3) 分别计算基准图像和待检测图像匹配对接头的距离,分别记为Rj和Cj,其中j=0,1,…,N,为对接头个数。
(4) 计算对接头抽动距离Lj=Cj-Rj,平均抽动距离为Lj/N。
通过所有对接头的抽动距离和平均抽动距离,可以很容易地得到接头的变化趋势。
采用本文方法对某矿主运煤输送带的10个接头进行实验,首先选定输送带最大速度时采集的接头图像作为基准图像,然后再实时采集输送带所有接头图像,计算平均抽动距离和最大抽动距离,结果见表1。
表1 某矿主运煤输送带接头抽动距离
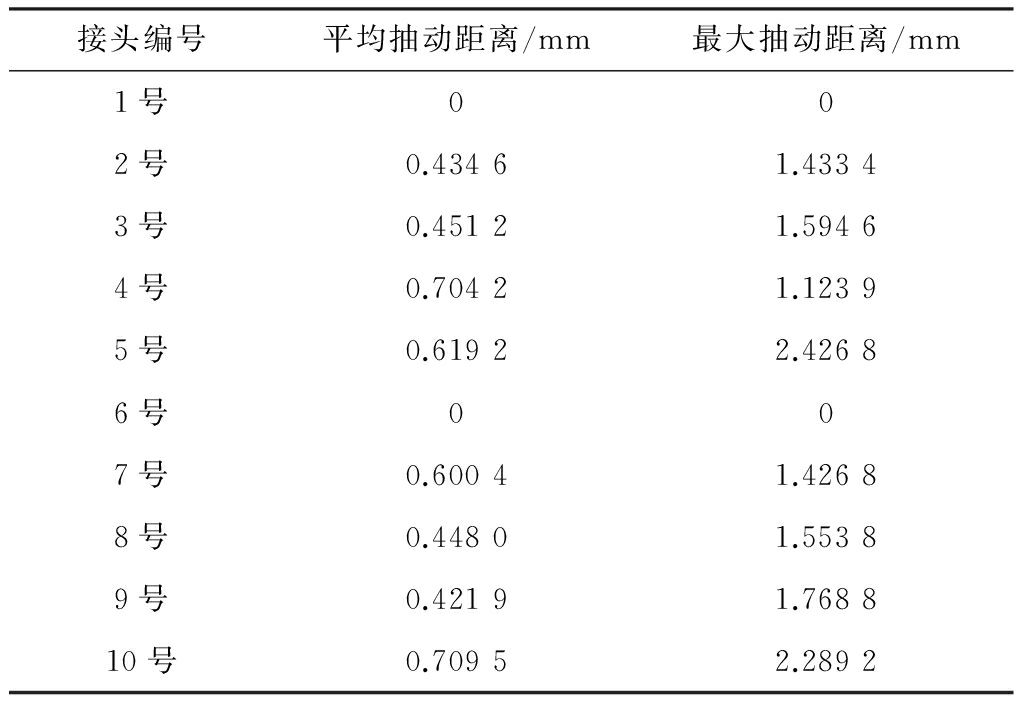
从表1可看出,10个接头的最大抽动距离和平均抽动距离均在很小范围内,以此为依据,可得到所有接头的变化趋势。
首先依据图像中的显著特征形成特征集,计算2幅图像的仿射变换参数,进行双线性插值运算,从而实现图像的配准,有效解决了由于输送带抖动、跑偏、速度变换造成的图像形变问题。然后对配准图像进行差分分割、消除孤立点等处理,最终计算出抽动距离。实验结果表明,本文提出的接头抽动检测方法能根据接头点的距离得到接头的抽动变化趋势。该方法仅利用了图像中的显著特征参与计算,具有适应性强、算法效率及配准精度高、对复杂形变不敏感等优点,可满足工业现场实际应用要求,对保障运输系统的安全运行具有重要意义。
参考文献:
[1] 朱荣涛.皮带运输机皮带撕裂原因探析及防治[J].江西煤炭科技,2014(3):98-99.
[2] 李彦隆.井下皮带运输机皮带撕裂原因分析及对策[J].机械管理开发,2015,30(5):98-99.
[3] 许伟.基于金属磁记忆法的钢绳芯胶带故障检测系统研究[D].太原:太原理工大学,2010.
[4] 吉增超,陆振洋.钢丝绳芯输送带检测技术及其发展状况[J].机电技术,2011,34(4):168-170.
[5] 张文明,卢金龙.变光照环境下皮带撕裂视觉检测方法研究[J].光学技术,2016,42(2):108-113.
[6] 季晓华.基于X射线的钢丝绳芯无损探伤系统研究[J].工矿自动化,2014,40(8):110-112.
[7] 殷勇辉,范忠明,梁骁,等.钢绳芯输送带接头实时监测系统设计[J].煤炭科学技术,2009,37(7):90-92.
[8] 焦晋杰,牛昱光.X光成像的钢绳芯输送带接头距离检测方法[J].机械工程与自动化,2012(5):133-134.
[9] 樊荣,张荣华,方崇全,等.强力输送带接头抽动检测算法研究[J].工矿自动化,2014,40(2):30-33.
[10] 廖斌.基于特征点的图像配准技术研究[D].长沙:国防科学技术大学,2008.
[11] 佘影.基于角点匹配的强力输送带接头识别算法[J].煤炭工程,2016,48(3):116-118.
[12] 杨小冈,曹菲,缪栋,等.基于相似度比较的图像灰度匹配算法研究[J].系统工程与电子技术,2005,27(5):918-921.
Detection method of joints twitching of powerful conveyor belt
LUO Minghua
(CCTEG Chongqing Research Institute, Chongqing 400039, China)
Abstract:In view of problem of inaccurate calculation of joints twitching caused by belt jitter, deviation and speed changes of powerful conveyor belt, a detection method of joints twitching based on joint image registration was proposed. The joint image of the secondary acquisition is registered, and the Y-difference method is used to locate the joints in the registration image. Distances of all the joint points are calculated and compared with the reference image to obtain the joint twitching distance. The change trends of all joints can be obtained according to the twitching distance. Experimental results show that the method has high accuracy and can meet practical application requirements.
Key words:powerful conveyor belt; joints twitching; image registration; Y-difference method; twitching distance
文章编号:1671-251X(2017)05-0037-04
DOI:10.13272/j.issn.1671-251x.2017.05.009
收稿日期:2016-12-28;
修回日期:2017-03-27;责任编辑:胡娴。
基金项目:重庆市社会事业与民生保障专项项目(cstc2015shmszx90007)。
作者简介:罗明华(1975-),男,重庆人,副研究员,主要研究方向为煤矿自动化,E-mail:lmhcari@163.com。
中图分类号:TD634.1
文献标志码:A
网络出版:时间:2017-04-25 17:54
网络出版地址:http://kns.cnki.net/kcms/detail/32.1627.TP.20170425.1754.009.html
罗明华.强力输送带接头抽动检测方法[J].工矿自动化,2017,43(5):37-40.