图1 快速掘进设备电控系统组成
呼守信
(中国煤炭科工集团太原研究院有限公司, 山西 太原 030006)
摘要:高效快速掘进系统的协同控制需要以工作面采掘、支护、运输工艺为基础,实现采掘、破碎、支护等多个移动设备之间协同行走和运输系统联动控制。针对上述需求,将高效快速掘进系统中各设备的电控系统通过无线通信装置进行数据双向交互,实现了运输系统联动控制、可弯曲带式输送机和迈步式自移机尾的联动控制、掘锚机与破碎机的协同作业,达到了各设备协调、连续、高效、安全运行的目的。
关键词:煤炭开采; 高效快速掘进; 协同控制; 无线通信; 联动
掘进工作面是现代化煤矿生产的主要环节,也是煤矿井下环境最恶劣、工作最复杂的系统之一,巷道快速掘进技术是支持高产高效矿井发展的重要组成部分[1-2]。高效快速掘进系统是用于巷道快速掘进的成套装备,由掘锚机、破碎机、十臂锚杆机、迈步式自移机尾、可弯曲带式输送机组成,其协同控制需要以工作面采掘、支护、运输工艺为基础,实现采掘、破碎、支护等多个移动设备之间协同行走和运输系统联动控制[3-4]。本文在研究高效快速掘进系统中各单机设备自动化基础上,采用无线通信装置设计高效快速掘进系统协同控制方案,达到各设备协调、连续、高效、安全运行的目的。
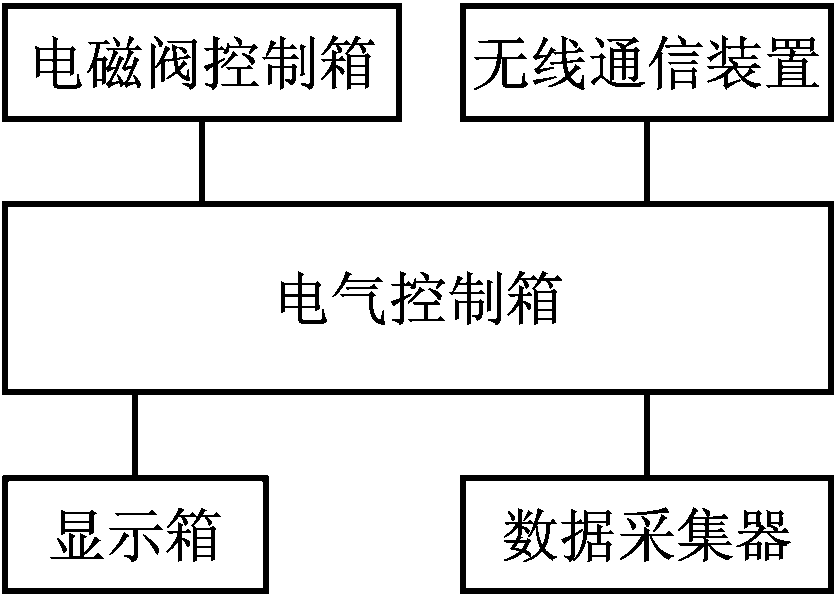
高效快速掘进系统中各设备的电控系统主要由电气控制箱、数据采集器、电磁阀控制箱、无线通信装置、显示箱等组成,如图1所示。
图1 快速掘进设备电控系统组成
各快速掘进设备的电控系统实现对设备上多个电动机的复合逻辑控制和保护、电磁阀控制和比例调节、传感器数据采集、遥控控制、图形显示、无线数据通信等功能[5]。各设备电控系统通过无线通信装置进行数据双向交互,实现高效快速掘进系统的协同控制。
无线通信装置用于传输煤矿井下高效快速掘进系统中各设备控制信号。无线通信装置通信技术参数见表1。
表1 无线通信装置通信技术参数
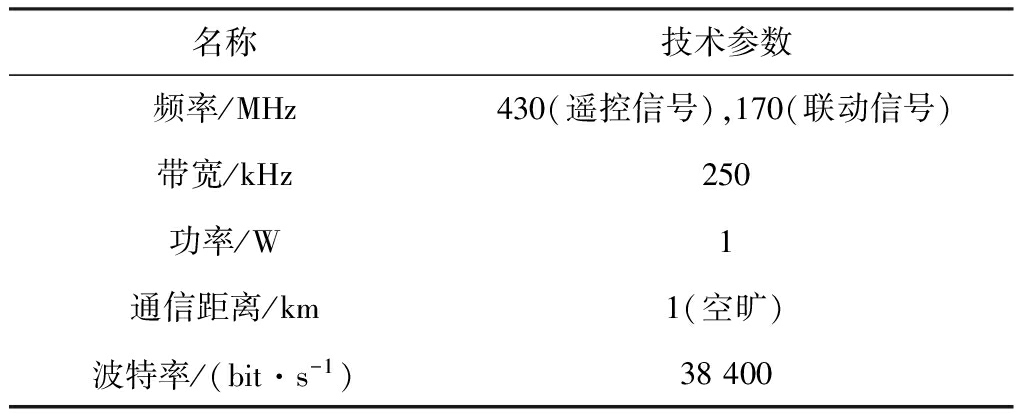
无线通信装置的数据格式为1 bit起始位、8 bit数据位、1 bit停止位和偶校验位。无线通信装置通过RS485接口写入Modbus地址,Modbus报文格式:命令+地址高位+地址低位+长度+装置设定地址+CRC高位+CRC低位[6]。
高效快速掘进系统控制网络中有4个无线通信装置,分别为1个网管站和3个数据站。网管站负责令牌传递管理,获得令牌的站点可向网内其他所有站点发送本站的节点数据[7]。每个站点均保存接收到的网内站点的控制数据,并按照站点地址从小到大的顺序存储[8]。无线通信装置接收遥控发射器的命令信号供电气控制箱读出,同时接收电气控制箱写入的遥控反馈数据,并发送给遥控发射器。
无线通信装置通过RS485总线按照Modbus协议和各设备电气控制箱相连,该连接中无线通信装置作为从机,各设备电气控制箱作为主机。各设备电气控制箱可向无线通信装置写入控制数据和遥控反馈数据,也可读出任何网内站点的控制数据。
在高效快速掘进系统中,掘锚机为连续行走,破碎机、可弯曲带式输送机为间歇行走。在不同工况下,各设备的行走一致性功能要求不同,电控系统可根据具体要求实现超限处理、区间警报、控制调整和区间停车等多种控制方式。
3.1 运输系统联动控制
煤矿井下快速掘进设备运输系统由掘锚机刮板输送机、破碎机刮板输送机、迈步式自移机尾、可弯曲带式输送机组成,其联动控制功能:
(1) 重载启动。可弯曲带式输送机采用头尾变频驱动方式,充分利用变频电动机软启动时启动转矩大、带负载能力强、机械冲击强度小的特点,实现输送机重载启动。
(2) 逆煤流启动。当运输系统启动指令发出后,按照迈步式自移机尾→可弯曲带式输送机→破碎机刮板输送机→掘锚机刮板输送机的顺序启动运输系统。
(3) 顺煤流停止。当运输系统停止指令发出后,按照掘锚机刮板输送机→破碎机刮板输送机→可弯曲带式输送机→迈步式自移机尾的顺序停止运输系统。
(4) 联锁控制。当掘锚机刮板输送机、破碎机刮板输送机、迈步式自移机尾、可弯曲带式输送机中任何一个运输设备发生故障时,整个运输系统停机[9]。
3.2 可弯曲带式输送机和迈步式自移机尾联动控制
可弯曲带式输送机和迈步式自移机尾在联动模式下,迈步式自移机尾电气控制箱通过无线通信装置接收行走信号后,驱动迈步式自移机尾前进。迈步式自移机尾确认可以行走后,通过无线通信装置向可弯曲带式输送机无线通信装置发送行走信号,可弯曲带式输送机电气控制箱接收到无线通信信号后,驱动可弯曲带式输送机后退,其后退力与迈步式自移机尾牵引力达到平衡。
3.3 掘锚机与破碎机协同作业
通过电控系统采集和分析掘锚机截割功率、掘进速度和破碎机状态等数据,使掘进速度与掘锚机截割功率、破碎机工作能力达到自动优化匹配[10],如图2所示。在掘进速度与掘锚机截割功率匹配的基础上,若破碎机工作能力小于掘锚机的运输能力且未达到自身额定工作能力,掘锚机电控系统发出控制信号,破碎机提高工作速度,以提高掘进效率[11]。若破碎机工作能力小于掘锚机的运输能力且达到或超过自身额定工作能力,掘锚机自动降低掘进速度,使掘进速度与破碎机工作能力达到最佳匹配,达到保护破碎机的目的[12]。掘锚机和破碎机启停控制:破碎机启动后掘锚机才能开始掘进工作;掘锚机开始掘进后破碎机才能行走;破碎机开始倒退后掘锚机才能开始倒退,并且破碎机与掘锚机距离不能小于设定值;若掘锚机停止工作,破碎机需工作一定时间后自动停止工作,避免破碎机下次带载启动,达到节能的目的。
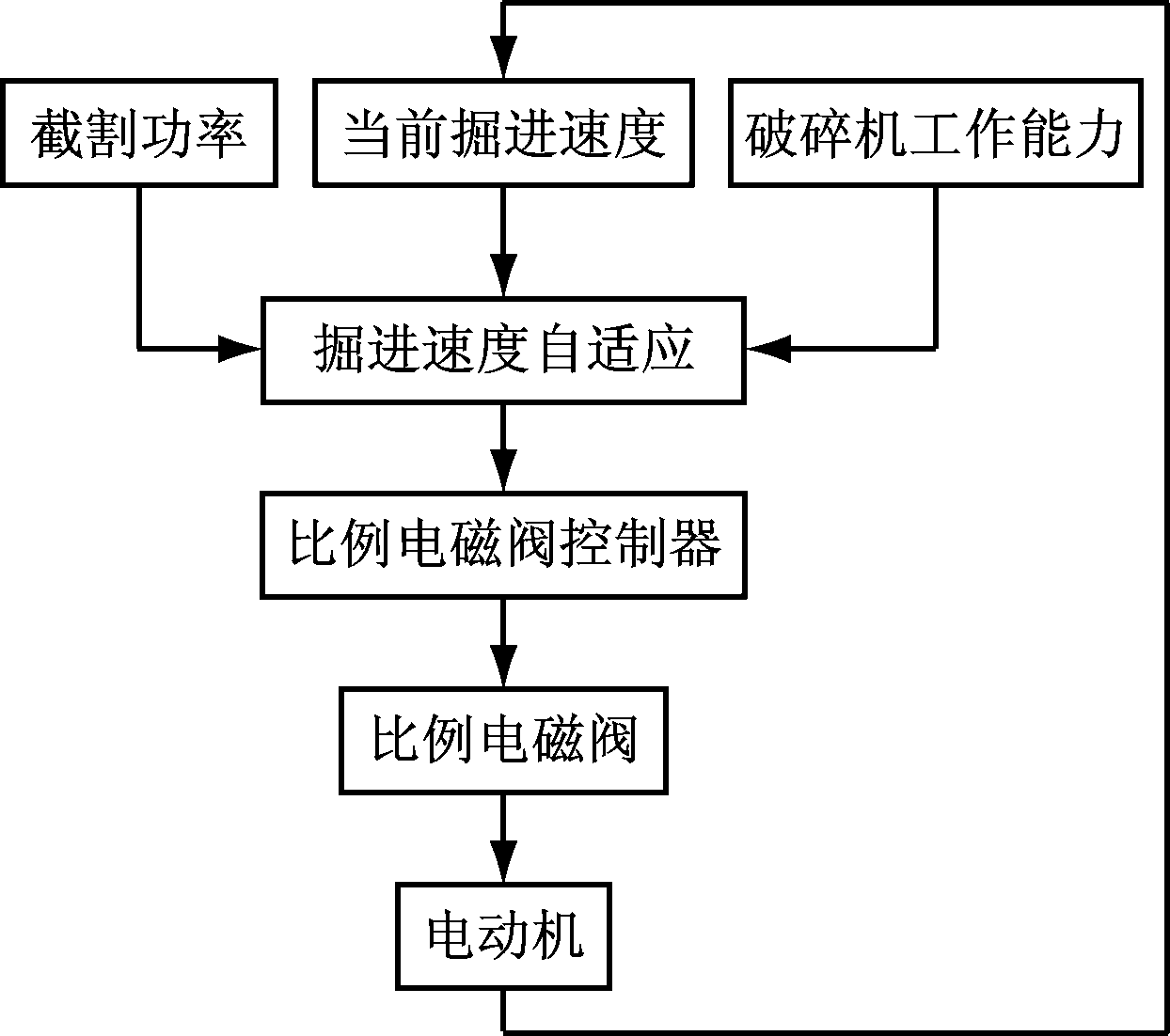
图2 掘锚机与破碎机协同作业流程
高效快速掘进系统中各移动设备的行走动作主要依靠操作人员遥控实现,然而在各设备控制信息共享的基础上,高效快速掘进系统中各设备之间的
基本运动关系已能够由各设备电控系统通过联动、联锁等控制手段实现。其中运输系统联动控制提高了高效快速掘进系统运行效率和可靠性,减少了设备空转时间,最大限度降低了能耗;可弯曲带式输送机和迈步式自移机尾的联动控制实现了迈步式自移机尾与可弯曲带式输送机的行走匹配;掘锚机与破碎机的协同作业实现了掘进速度、截割功率和破碎能力的自动优化匹配。
参考文献:
[1] 赵学社.煤矿高效掘进技术现状与发展趋势[J].煤炭科学技术,2007,35(4):1-10.
[2] 王永军,刘混举.神东矿区快速掘进技术装备开发与应用[J].机械工程与自动化,2016(4):101-103.
[3] 张忠国.煤巷快速掘进系统的发展趋势与关键技术[J].煤炭科学技术,2016,44(1):55-60.
[4] 汪腾蛟.新型高效单巷快速掘进系统应用及改进技术[J].煤炭科学技术,2014,42(5):121-124.
[5] 王震宇.基于PLC煤矿掘进机电控系统可靠性研究[J].中国科技纵横,2013(10):169.
[6] 李达.基于Modbus协议的RS485无线布线系统的设计与实现[D].长春:吉林大学,2009.
[7] 庄致,郭胜.基于RS485总线的串口令牌环通信的研究[J].微计算机信息,2007,23(10):225-227.
[8] 杨伟,江善和.基于 RS485的工业应急广播对讲系统通信网络设计[J].安庆师范学院学报(自然科学版),2013,19(1):81-84.
[9] 赵静,王建英.煤矿斜巷运输安全自动化控制系统[J].科技信息,2010,2(17):259.
[10] 王虹.我国煤矿巷道掘进技术和装备的现状和发展[J].煤炭科学技术,2010,38(1):57-62.
[11] 王慧,李娜娜,谢飞.掘进机恒功率自适应调速与记忆截割系统研究[J].测控技术,2015,34(8):86-88.
[12] 沈伟,李明,张广建,等.MB670掘锚一体机煤巷快速掘进技术[J].能源技术与管理,2011(3):67-69.
Cooperative control of high-efficient and rapid excavation system
HU Shouxin
(CCTEG Taiyuan Research Institute, Taiyuan 030006, China)
Abstract:Cooperative control of high-efficient and rapid excavation system need to realize cooperative walking among digging equipment, crushing equipment and support equipment and linkage control of transportation system on the basis of technologies of digging, support and transportation in working face. According to cooperative control requirement of high-efficient and rapid excavation system, electronic control system of each equipment in the system transmits data through wireless communication device, so as to realize linkage control of transportation system, linkage control between flexible belt conveyor and walking type self advancing conveyor tail and cooperative operation between digging-bolting machine and crusher, and achieve coordinated, continuous, high-efficient and safe operation of each equipment.
Key words:coal mining; high-efficient and rapid excavation; cooperative control; wireless communication; linkage
文章编号:1671-251X(2017)04-0086-03
DOI:10.13272/j.issn.1671-251x.2017.04.020
收稿日期:2016-12-05;
修回日期:2017-03-11;责任编辑:盛男。
基金项目:中国煤炭科工集团有限公司科技创新基金项目(2013ZB001)。
作者简介:呼守信(1978-),男,山西平遥人,副研究员,硕士,现主要从事煤矿井下电气产品的设计和研发工作,E-mail:zxb_hsx@163.com。
中图分类号:TD421/632
文献标志码:A
网络出版:时间:2017-03-28 17:38
网络出版地址:http://kns.cnki.net/kcms/detail/32.1627.TP.20170328.1738.020.html
呼守信.高效快速掘进系统的协同控制[J].工矿自动化,2017,43(4):86-88.