图1 瞬变电磁同步时钟系统结构
陈园园, 刘玉春
(周口师范学院 物理与电信学院, 河南 周口 466001)
摘要:针对恒温晶振长期稳定性差和GPS易受干扰、短期稳定性差等问题,设计了基于GPS与恒温晶振的瞬变电磁同步时钟系统。该系统采用“ARM+CPLD”的模式作为核心处理单元,以GPS的秒脉冲信号为基准,采用频率偏差测量模块在2个相邻的秒脉冲之间对高频信号的晶振频率进行检测,并采用自适应PID控制器实现对恒温晶振输出频率的调节,有效地解决了因单个频率偏差过大而影响恒温晶振控制电压精度的问题,提高了系统的稳定性;以秒脉冲信号为计时器,定时对分频器进行复位操作,实现了恒温晶振累积误差的自动消除,保证了输出信号相位的同步。测试结果表明,该系统实现了瞬变电磁发射机和接收机的高精度同步,在GPS信号正常的情况下,同步精度约为270 ns;在GPS信号丢失的情况下,同步精度约为350 ns。目前该系统已成功应用到瞬变电磁探测系统中,大量应用结果表明,该系统稳定性好,同步精度高。
关键词:瞬变电磁探测; 同步时钟; GPS; 恒温晶振; 频率偏差测量; 累积误差消除
瞬变电磁法是探测地下不同介质电性参数的重要方法之一,有易于加大勘探深度、施工效率高、受地形影响较小等特点[1-3],被广泛应用于地热、矿井等勘探领域[4-6]。在野外实际应用中,瞬变电磁发射机和接收机在空间上一般是分开使用的,因而要考虑设计一种可进行远距离时钟同步的系统来保证两者之间的同步工作。选择适当的同步方式,以满足对同步时钟系统高精度、高可靠性、低成本、可远距离同步的要求,是该领域的研究热点。国外比较成熟的瞬变电磁系统同步时钟设计都较完善[4],如加拿大的UTEM系统具有电缆同步、无线电同步和石英钟同步方式。国内研发的瞬变电磁系统由于技术和成本原因,在同步问题上的研究不够,基本上都采用了电缆同步方式[5],如IGGETEM-20型瞬变电磁仪、MSD-1型瞬变电磁仪、EMRS-2型瞬变电磁仪和TEMS-3型瞬变电磁仪等都采用的电缆同步方式。电缆同步方式只能用重叠回线工作装置,而在大多数地质环境下,重叠回线装置的固有过渡过程较长,从而获取的电性断面显示较低的电阻率,不利于实现瞬变电磁算法。近些年来,一些集成化的电法仪器开始采用GPS与恒温晶体协调工作的新型同步方式,如澳大利亚的Smartem-24系统等。不过这些同步时钟系统在勘查深度大、地质类型较复杂时的稳定性和精度都不是很高[7]。
针对恒温晶振长期稳定性差和GPS易受干扰、短期稳定性差等问题,本文设计了一种基于GPS与恒温晶振的时钟系统,实现了瞬变电磁发射机和接收机的高精度同步。该系统是针对国内某型瞬变电磁探测设备研制,目前已成功应用于电磁探测领域,为地质探测和矿山水灾预警等领域高新设备的研制提供了一种新型的同步控制系统设计方案,解决了瞬变电磁探测系统在实际探测中遇到的发射机与接收机空间分离使用时的同步问题[8]。
1.1 系统结构
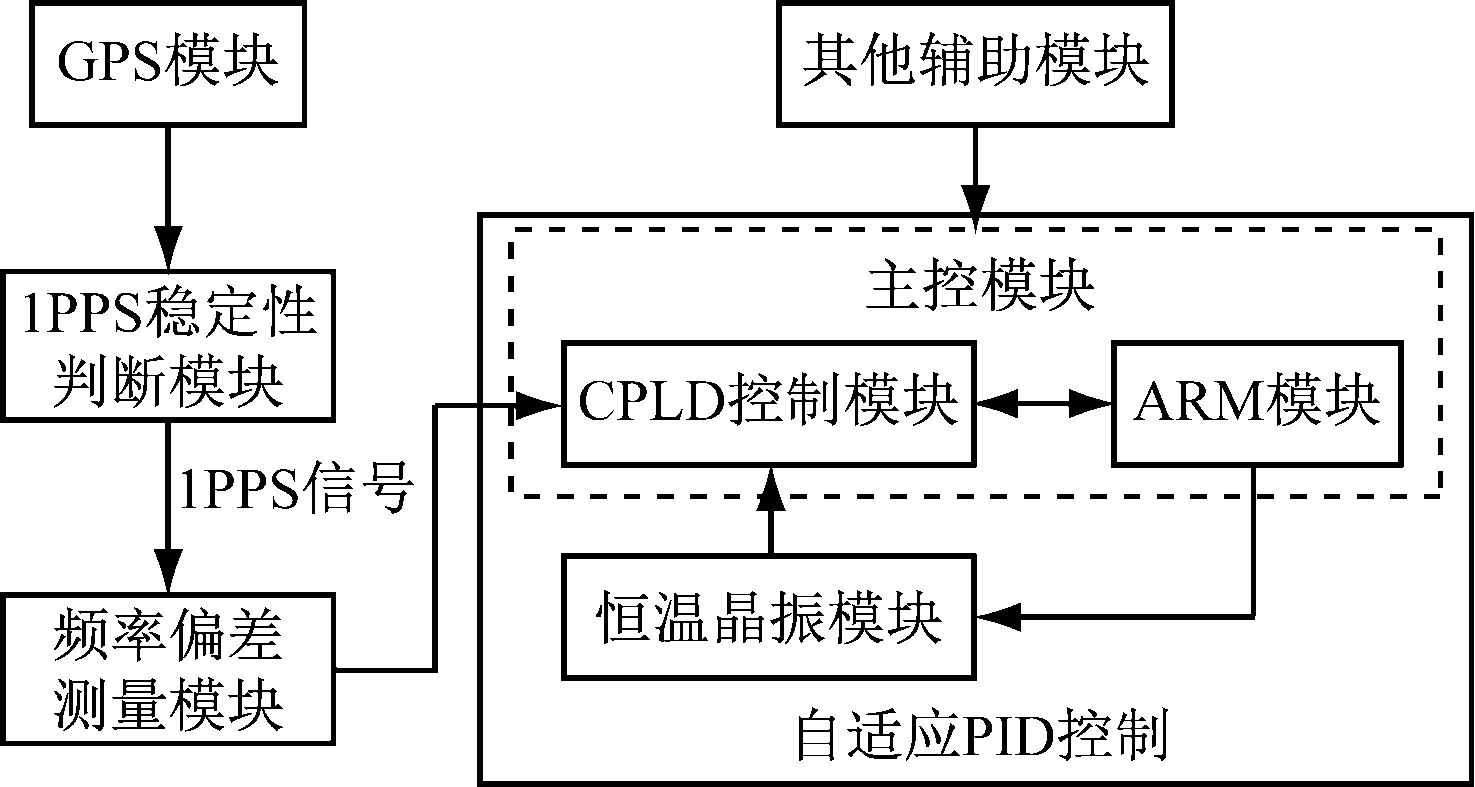
瞬变电磁同步时钟系统采用“ARM+CPLD”模式作为核心处理单元,选用STM32微控制器作为主控电路的处理器,选用MAX II系列的EPM7512ATC144-10N型CPLD芯片进行逻辑处理。整个系统主要由主控模块、GPS模块、1PPS(GPS秒脉冲信号)稳定性判断模块、频率偏差测量模块、恒温晶振模块及其他辅助模块构成,如图1所示。GPS模块接收到GPS信号后输出1PPS信号,该信号输入1PPS稳定性判断模块后得到稳定、可靠的1PPS信号;再经过频率偏差测量模块在2个相邻的秒脉冲之间对高频信号的晶振频率进行计数,并将计数值送入主控电路,定时地对分频器进行复位操作,以保证输出信号相位的同步,最后用自适应PID控制器实现对恒温晶振输出频率的调节,使其逐步地接近标称频率。
图1 瞬变电磁同步时钟系统结构
1.2 1PPS稳定性判断电路
1PPS稳定性判断电路采用硬件抗干扰的方式实现,其基本的实现原理如图2所示。该电路中计数器模块采用CPLD设计,CLK时钟由恒温晶振提供。由恒温晶振特性可知,在1 s内恒温晶振能够达到10-12的短期稳定度,因此,在1 s内计数器的计数精度将很高。利用此特性,在计数1 s到时计数器模块输出高电平,即开一个“小窗口”送入与门电路,只有在有效的秒脉冲信号到来时才能得到真正的1PPS信号。1PPS有效性判断时序如图3所示。
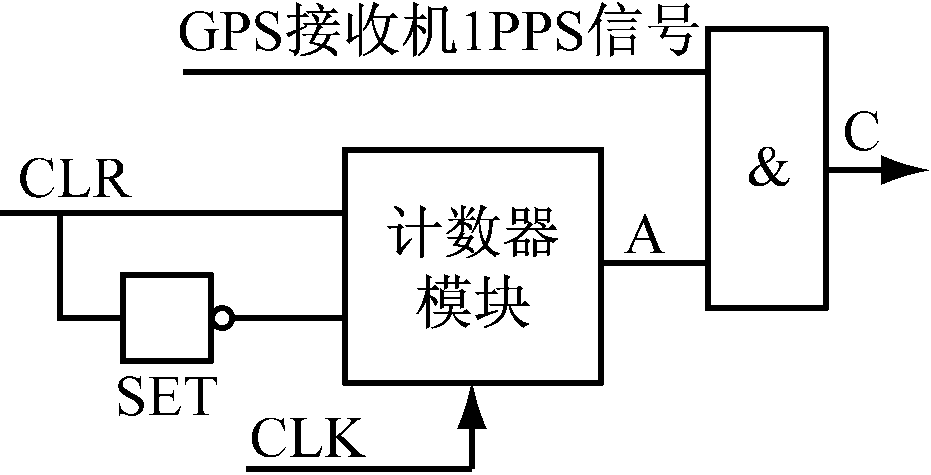
图2 1PPS有效性判断原理
结合图2和图3可以看出,该电路中的关键在于A信号的产生,A信号是GPS秒脉冲的使能信号,只有A信号为高电平期间的1PPS信号才有效,而A信号高电平产生的时刻应预先设定在接近于1 s~t时刻处,这里的t表示系统晶振的误差、相应中断服务程序执行的时间、1PPS误差值等时间误差的总和。处理器接收到秒脉冲信号后,将CLR端置“1”,使计数器清零。使用该方法有一定的误判风险,如在A信号的高电平区间出现了错误的1PPS信号,此时判别电路会认为该秒脉冲是有效的。由于采用恒温晶振作为计数器的基准时钟源,故1 s内的计时精度会很高,此时A信号高电平区间内的各1PPS信号相隔很近,甚至是重合的,因此,最终判别的秒脉冲信号对系统精度的影响很小,可以忽略。
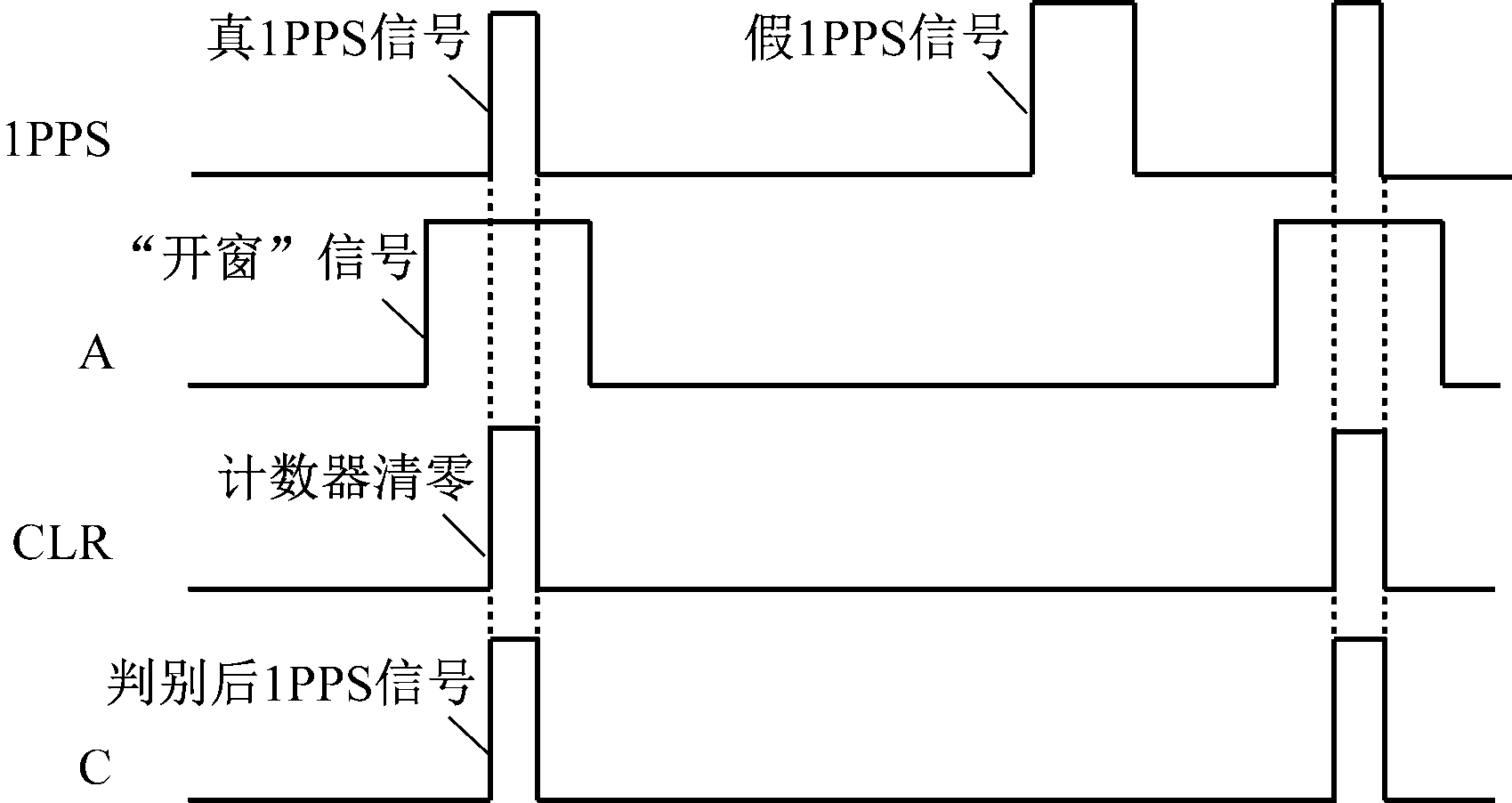
图3 1PPS有效性判断时序
1.3 频率偏差测量电路
频率偏差测量电路以GPS接收机输出的1PPS信号为基准。采用LEA-6T授时型GPS接收机,该款接收机输出的1PPS信号精度可高达15 ns。对恒温晶振倍频后的脉冲信号进行计数,然后与标称频率值相比较,实现频率偏差检测[9]。频率偏差测量模块检测到GPS秒脉冲的上升沿时,开启计数器并对高频脉冲计数;当检测到下一个秒脉冲上升沿时,关闭计数器并锁存计数值N。根据频率定义可知,此时送入计数器的高频时钟频率f1=N。设计数脉冲的频率为80 MHz,周期为12.5 ns。将实测频率与标称频率作差即可得到频率的差值,即Δf=|f1-80 000 000|。根据Δf,通过PID控制器实现对恒温晶振输出频率的调节[9]。
系统软件主要由ARM处理器控制相关软件和CPLD逻辑电路相关软件2个部分构成。其中ARM处理器控制相关软件采用C语言编写,CPLD逻辑电路部分的软件采用硬件描述语言(Verilog)实现。由ARM处理器和C语言的特性可知,程序是顺序执行的。系统启动后,首先对STM32的控制时钟源、串口、定时器、看门狗、中断等寄存器进行初始化;然后初始化液晶屏,同时配置CPLD的分频系数;初始化DAC,此时DAC的输出为恒温晶振的基准电压值;最后向CPLD传送默认分频系数,本系统中开机默认同步频率值为2.5 Hz;初始化完成后,开启液晶屏,显示时间信息、同步状态信息、GPS状态信息和电池电量等。
2.1 恒温晶振频率漂移处理方法
现有的恒温晶振频率漂移处理方法都尚未形成比较系统严谨的数学模型,本文引入了自适应PID控制算法,该算法依据系统设定值r(t)和系统输出实际值y(t)之间的差值进行反馈调节控制[11-12]。
设系统设定值与实际值之差为e(t),即
(1)
进行比例、积分、微分运算后构成PID控制规律:
(2)
式中:KP为比例常数项;TI为积分常数项;TD为微分常数项。
将e(t)作为输入,u(t)作为输出,则系统的传递函数为
(3)
自适应PID控制器原理如图4所示。

图4 自适应PID控制原理
在实际应用中,一般先将当前的采样数据与前3次的采样数据进行数学关联,以最大程度地降低采样数据中携带的噪声成分[13]。
y(t)经滤波后的表达式为
(4)
改进的PID控制算法为
(5)
式中α为设定值的目标值比例常数项,取值范围为0~1,当α=0时,控制器会比较平稳地给出对驱动负载的变化调节量;而当α=1时,控制器能够实现对被控对象的快速调节。
PID算法在ARM处理器里实现,在PID的执行过程中,由于控制环节的ARM处理器只能够得到晶振实际频率与标称频率的偏差值,并利用该偏差值来计算PID控制器输出的实际控制量,而不能得到式(5)中积分部分和微分部分的相关数据量,所以,为了实现控制必须对频率差值进行处理。本文采用离散化的方法将连续时间信号离散化成为采样序列,对这些采样序列的输入偏差值进行求和运算,用运算过程表示I环节,以相邻2个采样时刻的增量表示D环节,再对式(5)作近似变化,可得增量式数字PID控制算法:
(6)
式中:n为采样时刻,n=0,1,…;Δf(n)为n时刻采样的增量,本系统中为频率的偏差值;Kc为比例系数;ec(n)为n时刻比例控制项输入偏差量;Ki为积分系数,![]() ,Ts为采样间隔;ei(n)为n时刻积分控制项输入偏差量;Kd为微分系数,
,Ts为采样间隔;ei(n)为n时刻积分控制项输入偏差量;Kd为微分系数,![]() ;ed(n)为n时刻微分控制项输入偏差量。
;ed(n)为n时刻微分控制项输入偏差量。
自适应PID模型主要是由PID控制器和设定值延时传递及采样值反馈环节构成。通过频率偏差的测试模型可以找出与PID调节相关的信息:对于单一的比例控制,将得到最大的增益系数Km和最大的周期Tm;对于PI和PID控制,将得到系统响应时间和时间常数。这样,根据系统自动寻找的常数Km,Tm或响应时间和时间常数,可确 定Kc,TI和TD,进而计算出Ki和Kd。
ARM处理器根据当前得到的频率偏差数据,同时结合DAC频率偏差的历史数值,使用自适应PID控制算法进行计算,最终得到本次晶振电压的频率偏差控制量,进而实现对恒温晶振输出频率的调整。通过这种方式可有效地解决因单个频率偏差过大而影响恒温晶振控制电压精度的问题,提高了系统的稳定性。
2.2 恒温晶振累积误差自动消除方法
虽然通过自适应PID控制对恒温晶振的频率偏差进行了修正,但晶振的输出频率还是会存在缓慢的相位漂移现象[14]。由于瞬变电磁设备不仅要求发射机和接收机之间严格地频率同步,还要求两者的相位差小于1 μs,所以,在设计同步时钟时必须考虑消除晶振的累积误差。
将定时计数器的复位方式设置为上升沿触发方式,在对钟信号为低电平期间,分频器根据用户所选的频率值对时钟进行分频,系统不对其做任何处理;而一旦检测到对钟信号的上升沿,立即将分频器复位,将计数值清零后重新开始计数。为了消除2台同步时钟同步输出信号的初始相位差,考虑将同一个上升沿复位信号同时送入2台设备的分频器,此时分频器依据该信号同时执行复位清零操作,这样能够保证同步信号的初始相位差接近零。误差消除方法有自动消除和手动消除2种。恒温晶振累积误差自动消除方法仿真结果如图5所示。可见,累积误差自动消除方法不仅能够保证系统输出的同步信号相位一致,还能有效地避免因恒温晶振频率不一致导致的同步信号频率不一致的现象。

图5 恒温晶振累积误差自动消除方法仿真结果
为了保障测试结果的稳定性和准确度,在测试开始前先将恒温晶振开机0.5 h以上,使得恒温槽温度达到并保持预定值。在有GPS信号后的测试,要先对2台同步时钟进行手动对时。测试使用DSO5014A型数字存储示波器,该示波器的实时更新速率高达每秒100 000个波形,可提供准确的实时全带宽获取功能。测试波形如图6所示。从图6(a)可看出,2个同步时钟输出的同步波形之间的相位差为270 ns左右。从图6(b)可以看出,同步时钟之间的相位差约为350 ns。
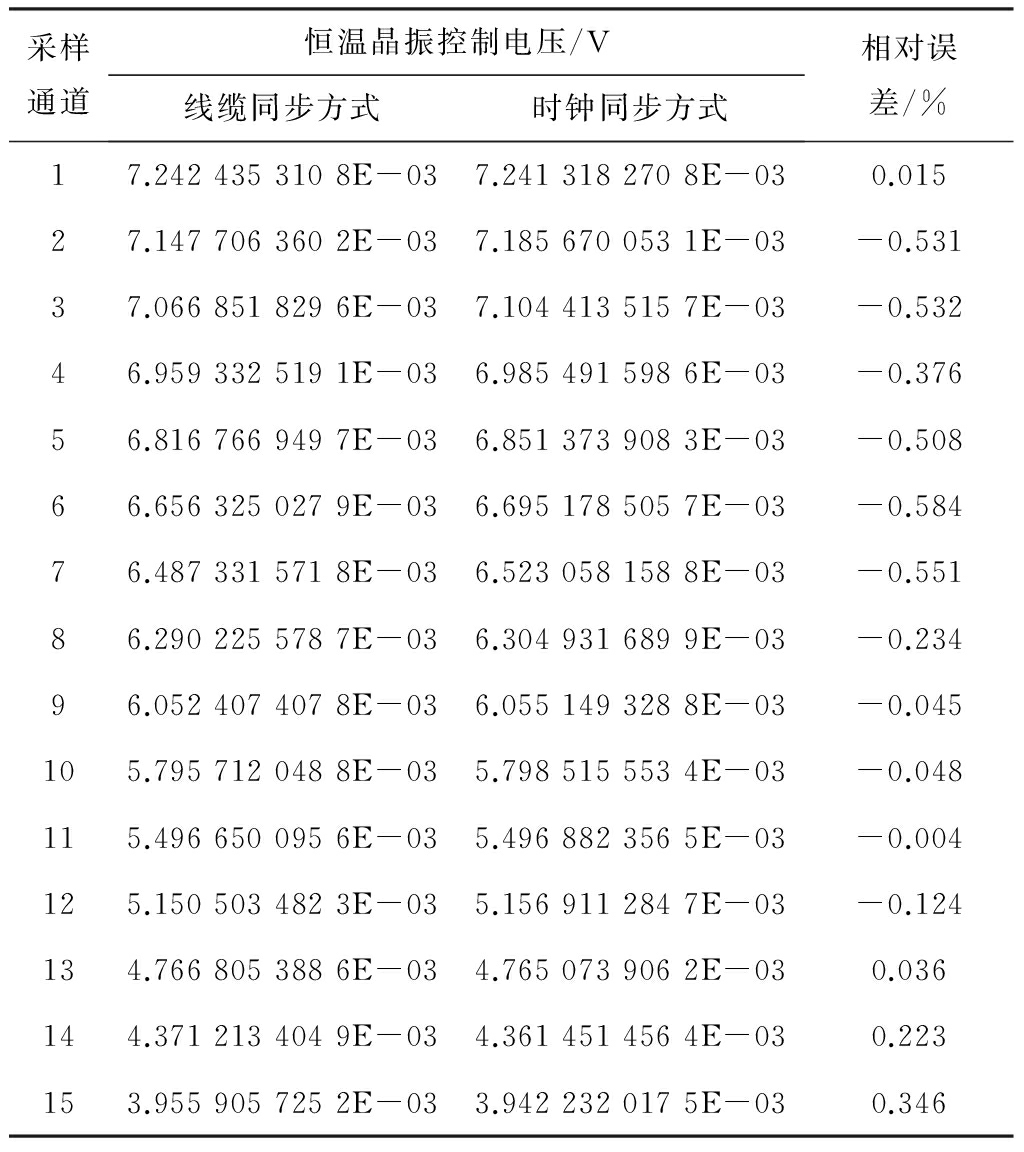
为进一步研究系统设计方案的可行性,在实际现场中应用瞬变电磁探测设备,并与线缆同步方式进行对比试验。试验中采用500 m×500 m中心回线,发射电流为30 A,同步频率为6.25 Hz。采用线缆同步与时钟同步2种方式,同步接收机采集的原始电压数据对比见表1。从表1可看出,2种同步方式的最大相对误差为0.584%。
采用时钟同步和线缆同步2种方式所得的数据衰减曲线对比如图7所示。可见,瞬变电磁接收机使用同步时钟采集到的数据衰减曲线与使用线缆同步采集到的数据衰减曲线轨迹一致。
由试验结果可以看出,由于系统可根据用户选择的频率自动设定消除误差的时间段,所以,相位偏移不会影响同步信号精度。如果其中1台或2台同步时钟的GPS信号丢失,系统将启动通过恒温晶振分频得到的秒时钟来对分频器进行复位[15],这是应对GPS丢星的首要对策,且该对策简单易行。
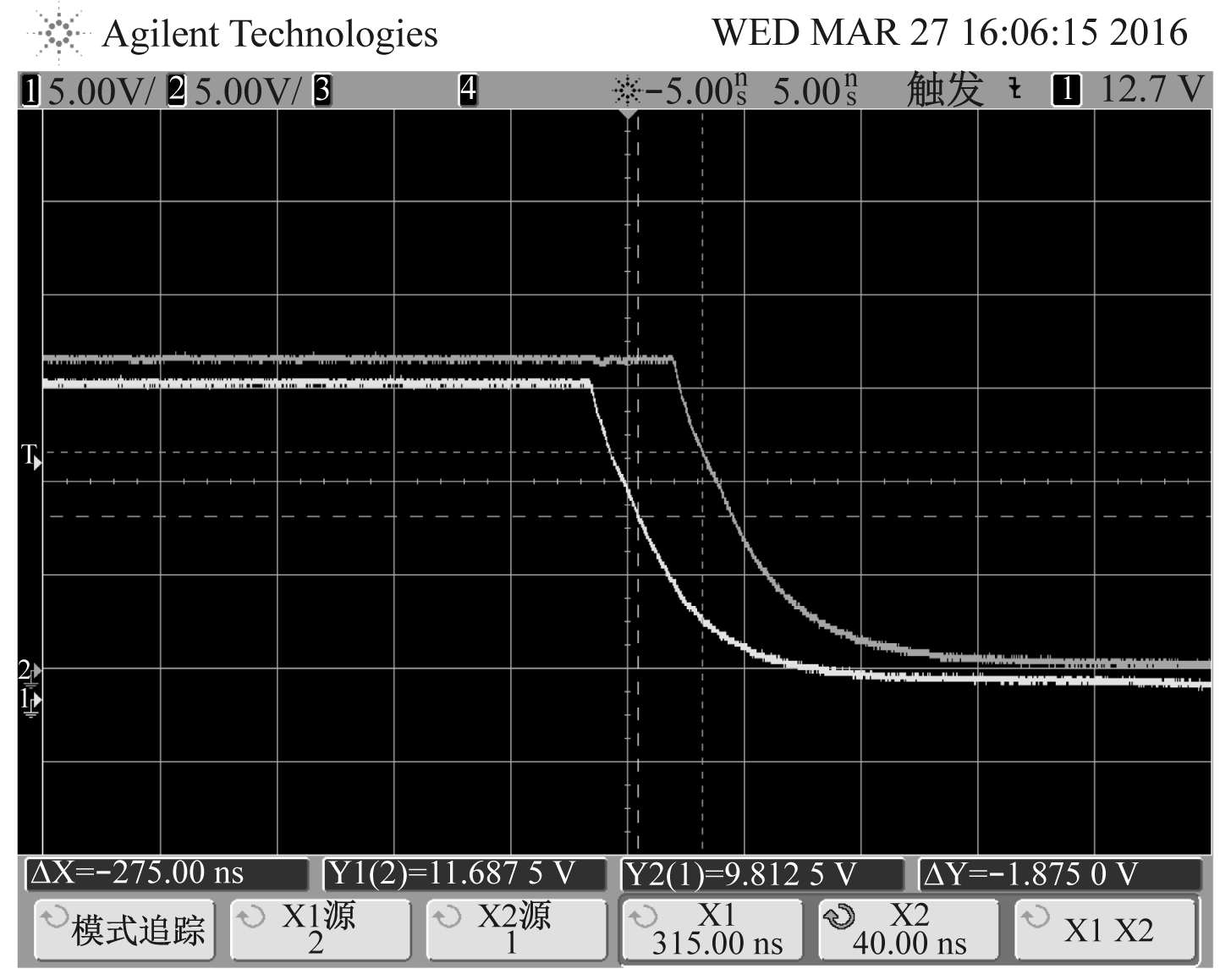
(a) 有GPS信号,正常连续工作4 h的同步波形

(b) GPS信号丢失,时钟系统保持的相位差波形
图6 2台仪器的同步信号测试波形
表1 同步接收机采集的原始数据对比
基于GPS与恒温晶振的瞬变电磁同步时钟系统采用GPS与恒温晶振互补协调工作,实现了瞬变电磁发射机与接收机的高精度同步。对GPS信号丢失情况下时钟的保持等问题进行了研究,并对系统软硬件的具体实现进行了阐述。以实际应用为导向,设计了1PPS信号稳定性的判断电路,给出了频率偏差的检测方法,同时采用改进的PID控制算法实现了恒温晶振频率偏差的自动调节功能,并最终消除了晶振的累积误差。目前该同步时钟系统已投入了批量生产,并成功应用到瞬变电磁探测系统中。大量实际应用结果表明,同步时钟系统稳定性好,同步精度高。
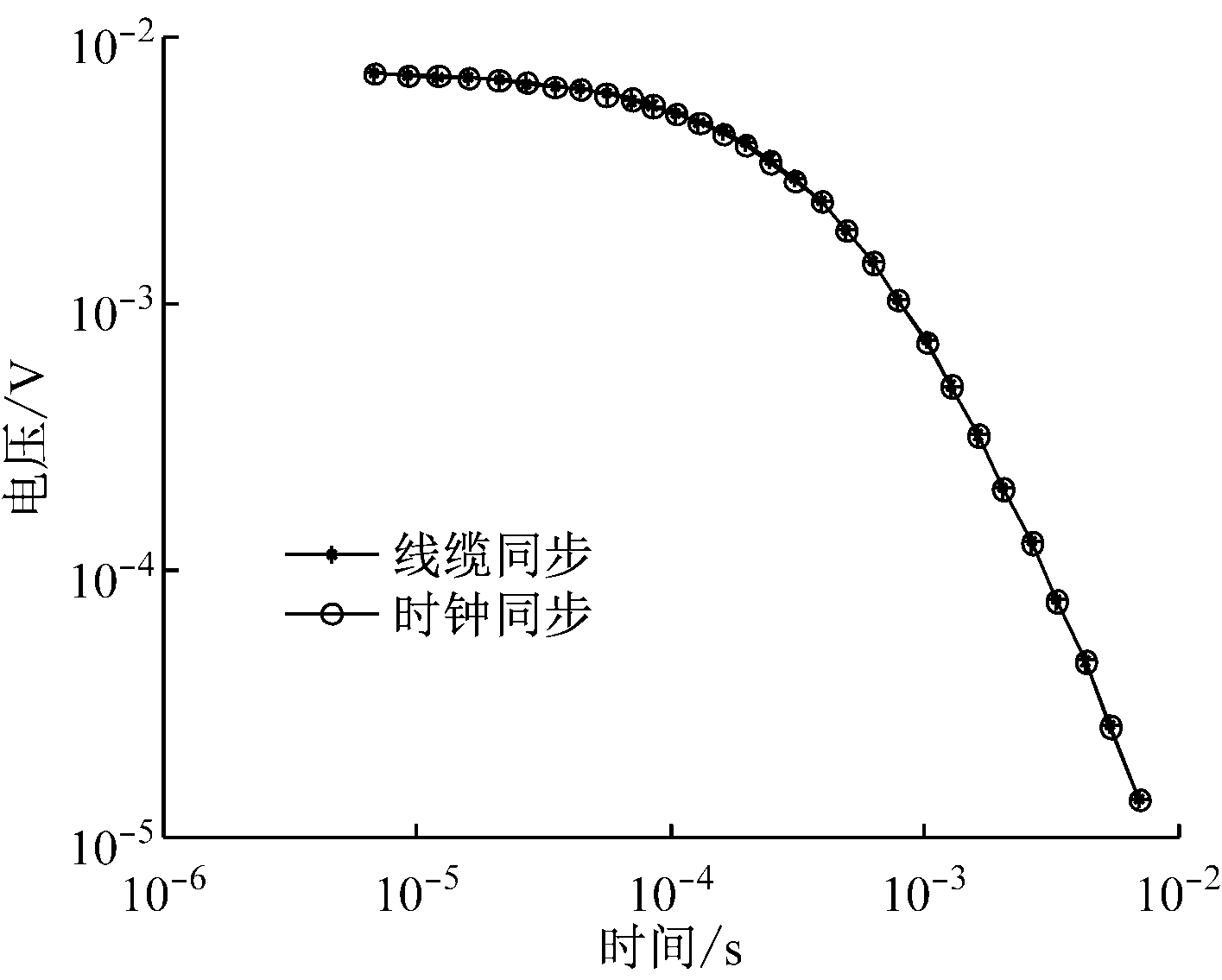
图7 2种方式所得的数据衰减曲线对比
参考文献:
[1] 范涛,李文刚,王鹏,等.瞬变电磁拟MT深度反演方法精细解释煤矿岩层富水性研究[J].煤炭学报,2013,38(增刊1):129-135.
[2] 韩冰,于生宝,孙晗.一种新型瞬变电磁发射机去过冲系统设计[J].工矿自动化,2014,40(3):45-48.
[3] 刘盛东,刘静,岳建华.中国矿井物探技术发展现状和关键问题[J].煤炭学报,2014,39(1):19-25.
[4] 房波.基于修正Anderson模型的冲击载荷下地基振动响应预测方法[J].中国工程科学,2014(11):96-102.
[5] 陕亮,许荣科,鲁胜章,等.瞬变电磁法原理、现状及在矿产勘查中的应用浅析[J].地质与资源,2009(1):70-73.
[6] 范涛,王秀臣,李貅,等.瞬变电磁方法在探测煤矿浅层高阻采空区中的应用[J].西北地质,2010,43(2):156-162.
[7] 姬智艳,邓维克,苏娟,等.瞬变电磁仪高精度GPS时钟同步的研究[J].电源技术,2014,38(1):145-148.
[8] 王国富,张超凡,闫海明,等.基于GPS与恒温晶振的时钟源装置:201120417327.0[P].2012-08-12.
[9] 张延,黄佩诚.高精度时间间隔测量技术与方法[J].天文学进展,2006,24(1):1-15.
[10] 张莹,周渭,梁志荣.基于GPS锁定高稳晶体振荡器技术的研究[J].宇航计测技术,2005,25(1):54-58.
[11] 郭楠,李智.专家PID算法在伺服系统中的应用与仿真[J].机械工程与自动化,2009(6):61-63.
[12] 陈昊.未建模自适应PID控制研究[D].南京:河海大学,2007.
[13] 赵德永,雷振山,杨文平,等.基于虚拟仪器技术的锅炉供热自动控制系统[J].机械与电子,2000(3):12-14.
[14] 李泽文,曾祥君,黄智伟,等.基于高精度晶振的GPS秒时钟误差在线修正方法[J].电力系统自动化,2006,30(13):55-58.
[15] ZHOU H, KUNZ T, SCHWARTZ H. Adaptive correction method for an OCXO[C]// IEEE International Frequency Control Symposium, 2010.
Synchronous clock system of transient electromagnetic based on GPS and OCXO
CHEN Yuanyuan, LIU Yuchun
(College of Physics and Telecommunication Engineering, Zhoukou Normal University,Zhoukou 466001, China)
Abstract:In view of problems of poor long-term stability of OCXO and susceptibility to interference and poor short-term stability of GPS, synchronous clock system of transient electromagnetic based on GPS and OCXO was designed. "ARM+CPLD" mode is used as core processing unit, and frequency deviation measurement module is used to detect crystal frequency of high frequency signal between two adjacent second pulses, taking GPS second pulse signal as benchmark. The self-adaptive PID controller is used to adjust output frequency of crystal oscillator, which effectively solves the problem that accuracy of control voltage of OCXO is affected because single frequency deviation is too large, and improves stability of the system. Second pulse signal is used as a timer to reset divider at regular intervals, which achieves automatic elimination of cumulative error of OCXO and ensures phase synchronization of output signal. The test results show that the system achieves high precision synchronization of transient electromagnetic transmitter and receiver, synchronization precision is about 270 ns when GPS signal is normal, and synchronization precision is about 350 ns when GPS signal is lost. The system has been successfully applied to transient electromagnetic detection system, a large number of practical application results show that the system has good stability and high synchronization accuracy.
Key words:transient electromagnetic detection; synchronous clock; GPS; OCXO; frequency deviation measurement; cumulative error elimination
文章编号:1671-251X(2017)03-0010-06
DOI:10.13272/j.issn.1671-251x.2017.03.003
收稿日期:2016-06-06;
修回日期:2017-01-18;责任编辑:胡娴。
基金项目:国家自然科学基金项目(61401526);河南省基础与前沿技术研究计划项目(142102210580);河南省科技厅重点科技攻关项目(132102210101)。
作者简介:陈园园(1986-),女,河南周口人,助教,硕士,主要研究方向为数字信号处理及自动控制,E-mail:phoneixtvctfy@163.com。
中图分类号:TD679
文献标志码:A
网络出版:时间:2017-02-28 16:38
网络出版地址:http://kns.cnki.net/kcms/detail/32.1627.TP.20170301.1508.003.html
陈园园,刘玉春.基于GPS与恒温晶振的瞬变电磁同步时钟系统[J].工矿自动化,2017,43(3):10-15.