图1 分布式槽波地震数据同步采集系统组成
科研成果
黄三1, 张法全1,2, 叶金才1, 王国富1, 王小红1
(1.桂林电子科技大学 信息与通信学院, 广西 桂林 541004;2.广西无线宽带通信与信号处理重点实验室, 广西 桂林 541004)
摘要:为实现槽波地震数据采集系统中各个采集终端之间及同一采集终端2个通道之间的同步,设计了一种分布式的双通道槽波地震数据同步采集系统。该系统采用弱信号调理电路提高地震信号的信噪比,采用八通道同步采样芯片实现了同一采集终端上2个通道的同步采样,构建了由GPS接收机、数字锁相环及STM32主控制器组成的时钟同步系统,并采用自适应恒温晶振模型驯服算法对恒温晶振的温漂特性和老化特性进行预测和校准,使得各采集终端在矿井中仍可保持长期的时钟同步和时间同步。测试结果表明,该系统实现了分布式多通道地震信号的同步采集,在井下连续工作8 h,各个数据采集终端之间的同步精度优于10 μs。
关键词:煤炭开采; 槽波地震监测; 数据采集; 同步采样; AOM驯服算法; 恒温晶振
在井下槽波地震勘探实验中,精确地采集地震波信号和记录地震波的走时是至关重要的,这就要求各个传感器的数据必须同步采集。在设计槽波地震数据采集系统时,不仅要解决井下各数据采集终端之间的同步问题,同时还要解决同一采集终端2个不同通道之间的同步采样问题,还需采用弱信号处理技术提高地震信号的信噪比[1]。目前,国外较先进的防爆槽波地震勘探仪器要属Summit型和Summit Ⅱ Ex型防爆槽波地震仪,该仪器由检波器、数据采集站、中继站及中心站等部分构成,各数据采集站通过数据传输线与中继站和中心站相连,即数据的同步采样通过线缆连接实现。但该仪器在井下勘探时存在布设不方便、连线复杂、灵活性差等问题。而国内的研究则侧重理论研究,热点主要集中在成像技术、数值模拟及频散分析等算法方面,对槽波地震勘探设备的研究较少[2-6]。因此,为提高槽波地震勘探设备的性能和灵活性,本文设计了一种分布式双通道槽波地震数据同步采集系统,采用GPS+数字锁相环的同步方法实现了各数据采集终端之间的同步。
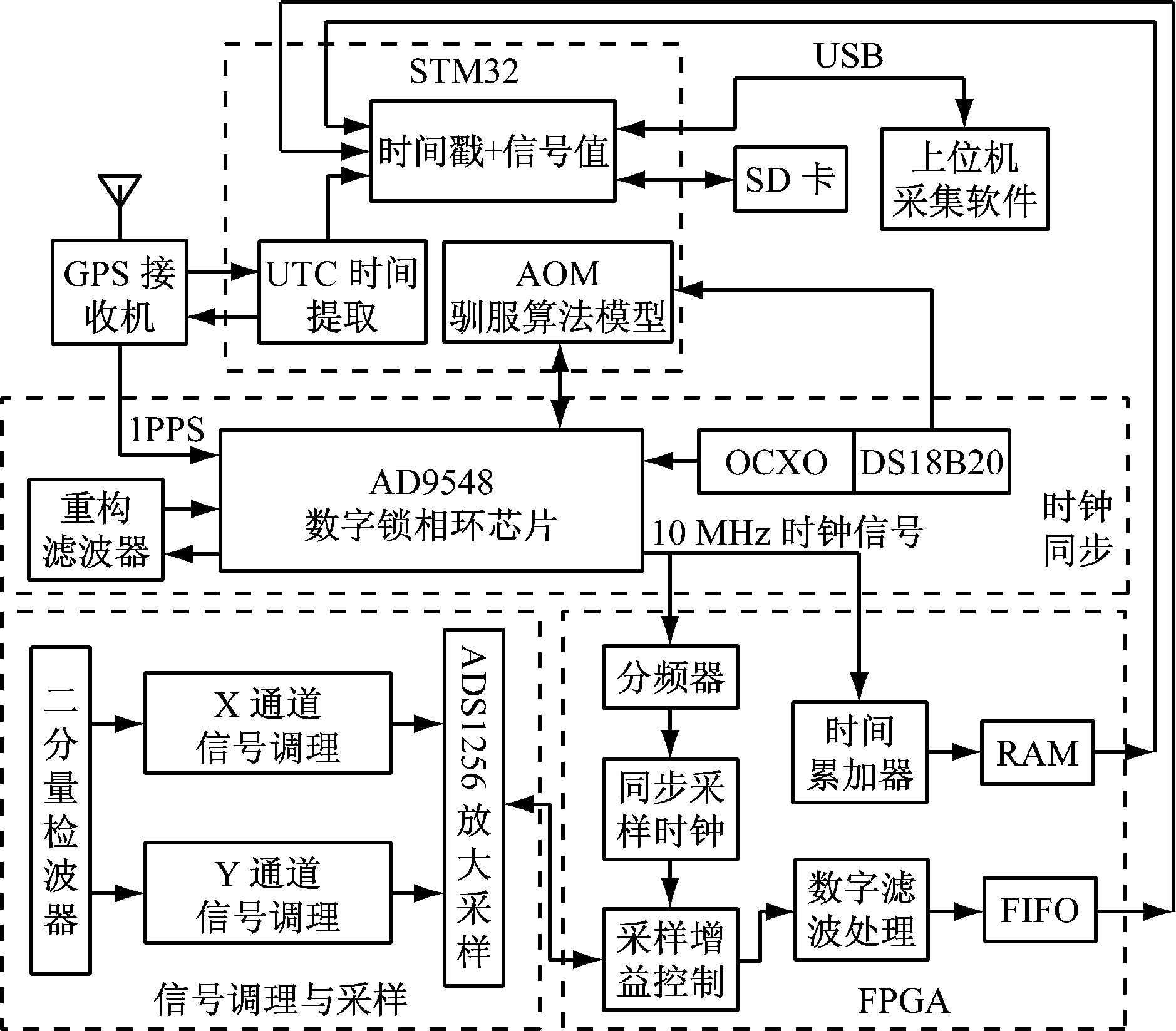
分布式槽波地震数据同步采集系统主要由信号调理与采样子系统、FPGA逻辑控制器、时钟同步子系统及STM32主控制器等组成,如图1所示。系统工作原理:下井前,GPS接收机为系统提供授时服务,同时产生1PPS信号(秒脉冲信号)送入数字锁相环作为基准时钟信号,OCXO(Oven Controlled Crystal Oscillator,恒温晶体振荡器)产生频率为10 MHz的本地时钟信号,数字锁相环以本地时钟信号作为系统时钟源,将其输出的时钟信号调整至与GPS秒脉冲信号同步,将同步后的10 MHz时钟信号送入FPGA作为系统时钟信号,经分频器分频后作为ADC的采样时钟信号,FPGA在系统时钟信号的驱动下进行时间累加运算,为系统提供准确的时间戳信息。STM32运行AOM(Adaptive Oscillator Model,自适应恒温晶振模型)驯服算法,利用Kalman滤波器预测恒温晶振的温漂特性和老化特性;下井后,GPS秒脉冲信号的消失使得数字锁相环芯片进入保持模式,数字锁相环根据AOM驯服算法训练所得的FTW(Frequency Tuning Word,频率调谐字)值控制输出时钟,继续保持与GPS秒脉冲信号同步。在井下数据采集过程中,由检波器拾取二分量的槽波信号,经由信号调理电路和AD转换后送入FPGA,由FPGA控制ADS1256的采样时序和放大增益,并将时间戳信息写入RAM中,将数字滤波处理后的信号值经归一化处理后写入FIFO中,STM32通过FSMC(Flexible Static Memory Controller,可变静态存储控制器)总线读取FPGA的RAM数据和FIFO数据,并按照标准的地震数据文件格式将数据和其他信息写入SD卡。
图1 分布式槽波地震数据同步采集系统组成
2.1 弱信号调理电路
由于检波器检测到的地震信号较微弱且信噪比低,不能直接进行AD转换,所以,在进行ADC采样前需对信号进行放大、滤波处理。同时,由于传播衰减和放炮药量等因素的影响,导致检测到的信号动态范围大,必须设计增益可调的功能,使信号幅度控制在ADC采样范围内。AD8230是一款低漂移、差分采样、精密仪表放大器,非常适合热电偶和桥式传感器应用,故本文将其作为前置放大器,通过2个外部电阻RF和RG进行增益设置[7],其增益稳定度远远高于采用单个电阻设置增益的仪表放大器。增益计算公式为
(1)
为了降低仪表放大器电路中的射频干扰整流误差,在仪表放大器前使用一个差分低通滤波器,一方面尽可能多地消除输入线路中的射频干扰,另一方面使每条线路与接地(共用)之间的交流信号保持平衡,同时在整个测量带宽内维持足够高的输入阻抗[8]。放大滤波电路如图2所示,RFI滤波器(射频干扰滤波器)是一种桥接电路,为了使桥路平衡,必须保证R1=R2=R,C1=C2=C,该滤波器的-3 dB差分带宽为
(2)
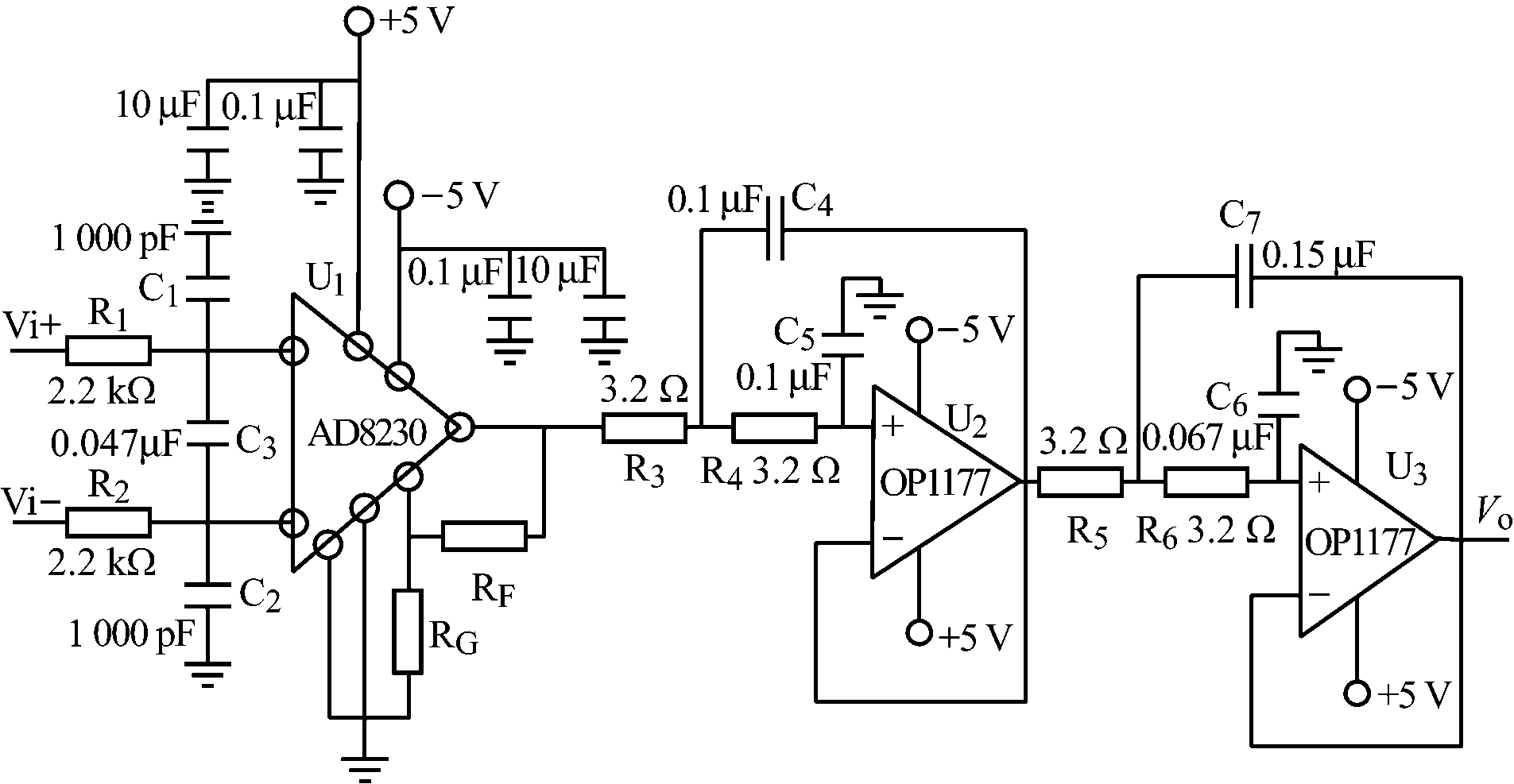
图2 放大滤波电路
共模带宽决定于2个RC网络(R1C1和R2C2)的对地并联阻抗,而不受电容C3的影响,-3 dB共模带宽为
(3)
槽波地震信号的频率范围一般为几十赫兹至几百赫兹,设计截止频率为500 Hz的四阶巴特沃斯低通滤波器将高频噪声滤除。对于第1级滤波电路,R3=R4,则滤波器输出为
(4)
(5)
式中:Q1为品质因数;w1为滤波器带宽。
同理,对于第2级滤波电路,R5=R6,则滤波器输出为
(6)
(7)
2.2 ADC电路
ADC电路设计选用24位Δ-∑型八通道同步采样模数转换器ADS1256,该器件内部集成了模拟多路开关、输入缓冲器、可编程增益控制器(PGA)、四阶Δ-∑调制器及可编程数字滤波器等部件,既可实现ADC同步采样的功能,又可实现增益可编程调节的功能,可适应槽波信号动态范围大的特点。为了提高输入信号的抗干扰能力,ADC通常需要采用差分输入的形式,这种形式不仅有利于抑制共模噪声,还能带来更好的动态性能。因此,本设计采用AD8131作为ADC的驱动电路,将信号调理电路输出的单端模拟信号转换成差分信号输入ADC电路,设计的电路如图3所示。ADS1256通过四线模式的SPI总线与FPGA相连,2.5 V的基准电压由高精度的基准电压芯片ADR431B提供,并经过由运放OPA350组成的参考电压缓冲电路增强滤波后引入VREFP脚,晶振时钟频率为7.68 MHz,设置的采样率约为2 kSample/s[9-11]。
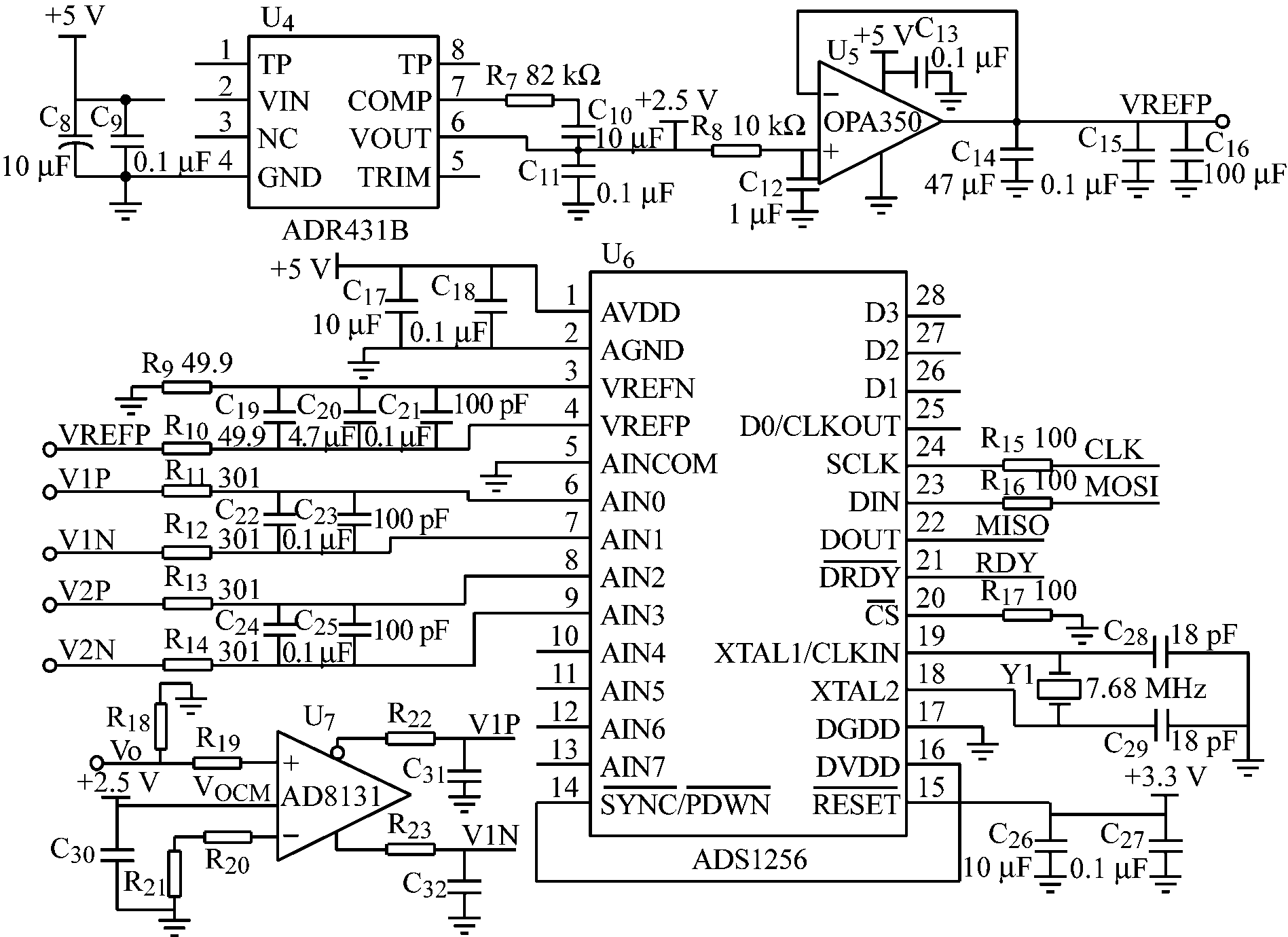
图3 ADC驱动电路及采样电路
3.1 GPS接收机电路
目前,授时系统中广泛应用的GPS接收机较多,由于各生产厂家采用的算法、工艺及硬件平台均不相同,故产品性能也有很大的差异。综合考虑产品的性价比、稳定性及精度等因素,本设计采用LEA-6T授时型GPS接收机,该款接收机输出的1PPS信号精度高达15 ns,同时有专用的频率输出引脚及秒脉冲输出引脚,频率的精度高达10-12,冷启动首次定位时间不超过26 s,热启动和辅助启动首次定位时间小于1 s,即使在GPS信号微弱时也可实现加速启动,这一特点很好地解决了GPS锁定慢、定位难的问题[12]。LEA-6T授时型GPS接收机在本设计中的具体应用电路如图4所示,J12是连接GPS天线的SMA底座,GPS_TX、GPS_RX引脚分别与STM32主控制器的USART1_RX、USART1_TX引脚相连,GPS_1PPS是秒脉冲信号的输出引脚,与AD9548芯片的REFA引脚相连,将1PPS信号作为参考输入信号引入AD9548芯片。
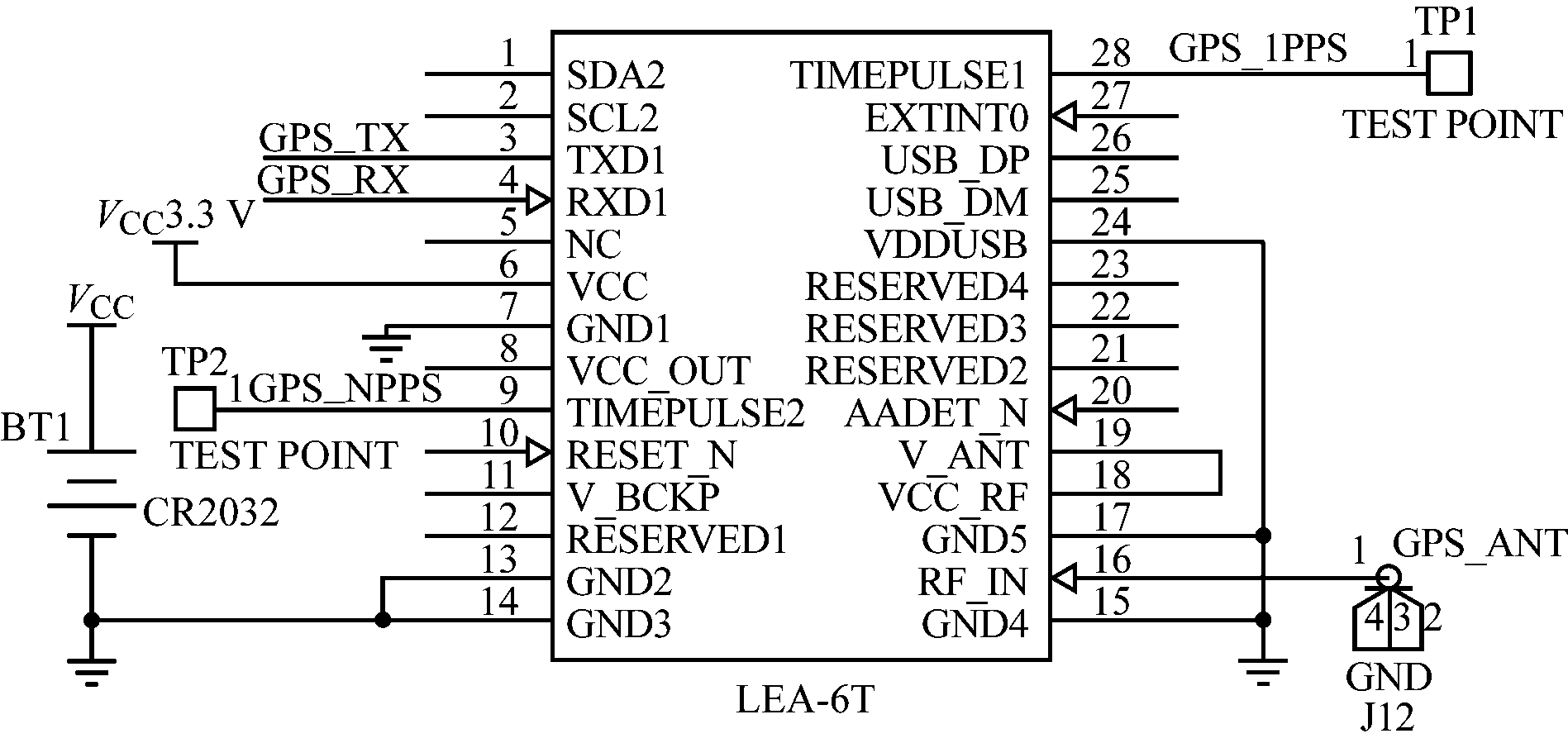
图4 LEA-6T授时型GPS接收机应用电路
3.2 数字锁相环模块电路
数字锁相环模块主要由数字锁相环芯片和模拟滤波器构成,核心电路如图5所示。数字锁相环芯片作为整个模块的核心芯片,被用于跟踪和锁定GPS接收机产生的1PPS信号,从而实现本地时钟信号与1PPS信号同步,本系统采用AD9548芯片作为数字锁相环,该芯片支持频率低至1 Hz的参考输入信号,当所有的参考输入都消失的时候,AD9548可自动切换至保持(Holdover)模式,继续为系统提供同步的时钟信号[13]。模拟滤波器作为辅助器件,是由图5中的L1—L6、C18—C28及R7—R11等器件构成的一个截止频率为240 MHz的低通滤波器,当AD9548芯片内的DAC输出正弦波信号时,经过外部低通滤波器后得到频谱纯净的信号,然后从CLKINN和CLKINP引脚送回AD9548芯片,经由时钟分配单元分频路由后输出期望的时钟信号。AD9548与STM32单片机通过SPI总线通信,RESET是AD9548的复位管脚。
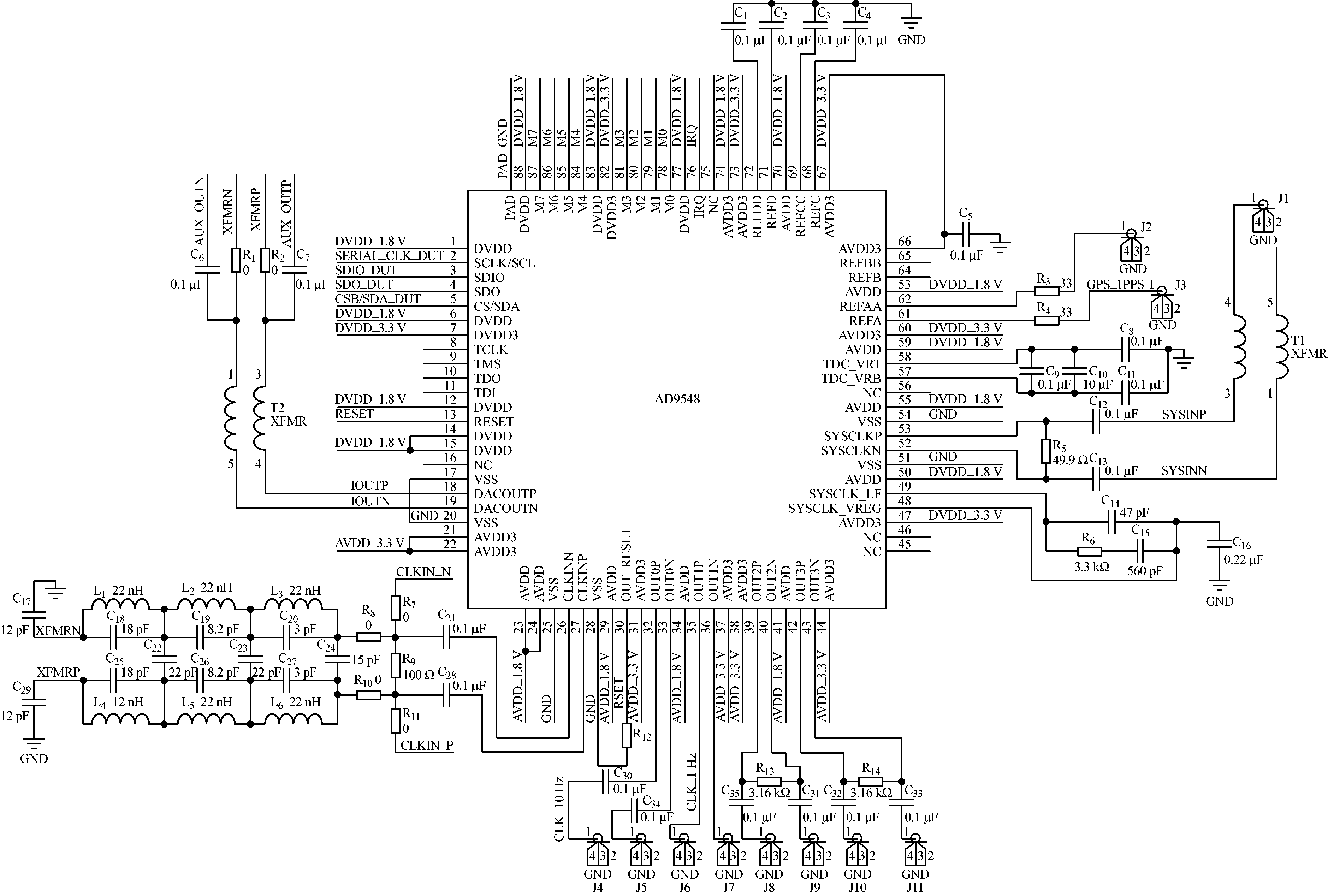
图5 数字锁相环模块核心电路
3.3 AOM驯服算法
若需要在井下继续保持时钟同步,则需利用AOM驯服算法对OCXO的频率变化趋势进行预测,即对OCXO的老化特性和温漂特性进行预测,而OCXO的老化特性和温漂特性均可近似为线性曲线,因此,可采用Kalman滤波器来进行线性模型的估计。由于老化特性是影响OCXO频率长期稳定性的主要因素,而温漂特性是影响OCXO频率短期稳定性的主要因素,所以,在进行模型预测之前,需将两者进行分离提取,即利用2种不同截止频率的IIR(Infinite Impulse Response,无限冲击响应)低通滤波器将2个频率不同的参数进行分离。由Kalman滤波器和IIR低通滤波器构成的AOM驯服算法模型如图6所示[14-15]。
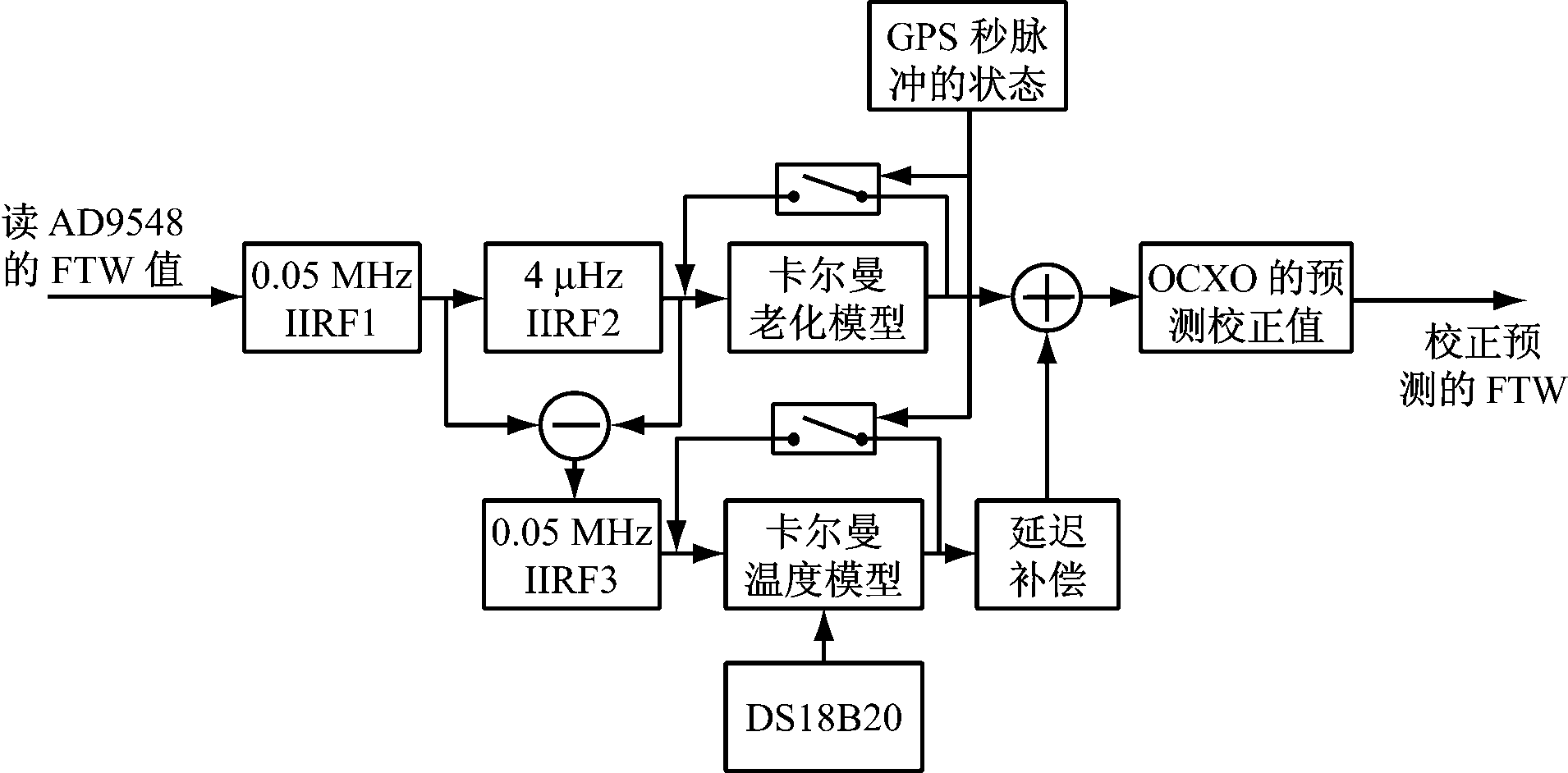
图6 AOM驯服算法模型
本文选用的MV180型OCXO的温频特性为2×10-3Hz/70 ℃,温度的最大变化率达10 ℃/h,则经运算可求出每秒的温漂为7.94×10-8Hz/s,从而可求出IIRF1的截止频率为0.05 MHz,即是每秒最大温漂值的6.3倍(另乘上数字锁相环倍频系数100),IIRF1用于衰减GPS接收机引入的高频噪声。MV180型OCXO老化率为2×10-1Hz/a,求出每秒的平均老化率为6.34×10-9Hz/s,所以,IIRF2的截止频率为4 μHz,即为秒老化率的6.3倍(另乘上数字锁相环倍频系数100),IIRF2用于从IIRF1的输出中分离出老化特性。IIRF3的参数与IIRF1的一致,均是一阶低通滤波器,IIRF2是三阶低通椭圆滤波器,将IIRF1的输出量减去IIRF2的输出量,即可分离得到温度漂移率,经过IIR滤波器处理后的信号分别送入AAM模型(老化模型)和ATM模型(温度模型)进行训练,最后根据2个模型的训练可预测出校正之后的FTW值,当GPS秒脉冲失效时,STM32再通过SPI总线将最终训练所得的FTW值写入AD9548,AAM模型和ATM模型的反馈回路由GPS秒脉冲信号的状态决定。
通过调用STM32的DSP库在硬件上实现了AOM驯服算法,为了测量各数据采集终端在GPS信号消失后的同步误差,拔掉GPS 1PPS信号,然后用示波器观察2个数据采集终端在24 h内的时钟同步情况,记录下2个采集终端输出的1 Hz 时钟信号之间的相位差并绘制成曲线,如图7(每4 h记录1次)所示,24 h后LCD屏上显示的信息如图8(a)所示,2个时钟信号的波形如图8(b)所示。由图7可知,系统进入保持模式的24 h内,前8 h内,2个采集终端的同步精度优于10 μs,后16 h内的同步精度优于18 μs。
完成时钟同步的测试后,在井下进行了放炮测试,传感器与放炮点相距200 m,采用频率为125 Hz的勒夫波,数据采集系统采集到的地震波波形如图9所示,系统记录的地震波到达检波器的时间为54 029.31 ms,而放炮信号触发记录仪记录的放炮时间是53 878.27 ms,计算得到地震波在煤层中的走时是151.04 ms,因此,可计算出地震波在煤层中的传播速度约为1 324.15 m/s,根据频散特性可推测煤层厚度约为4 m,与实际挖掘验证的情况基本一致。
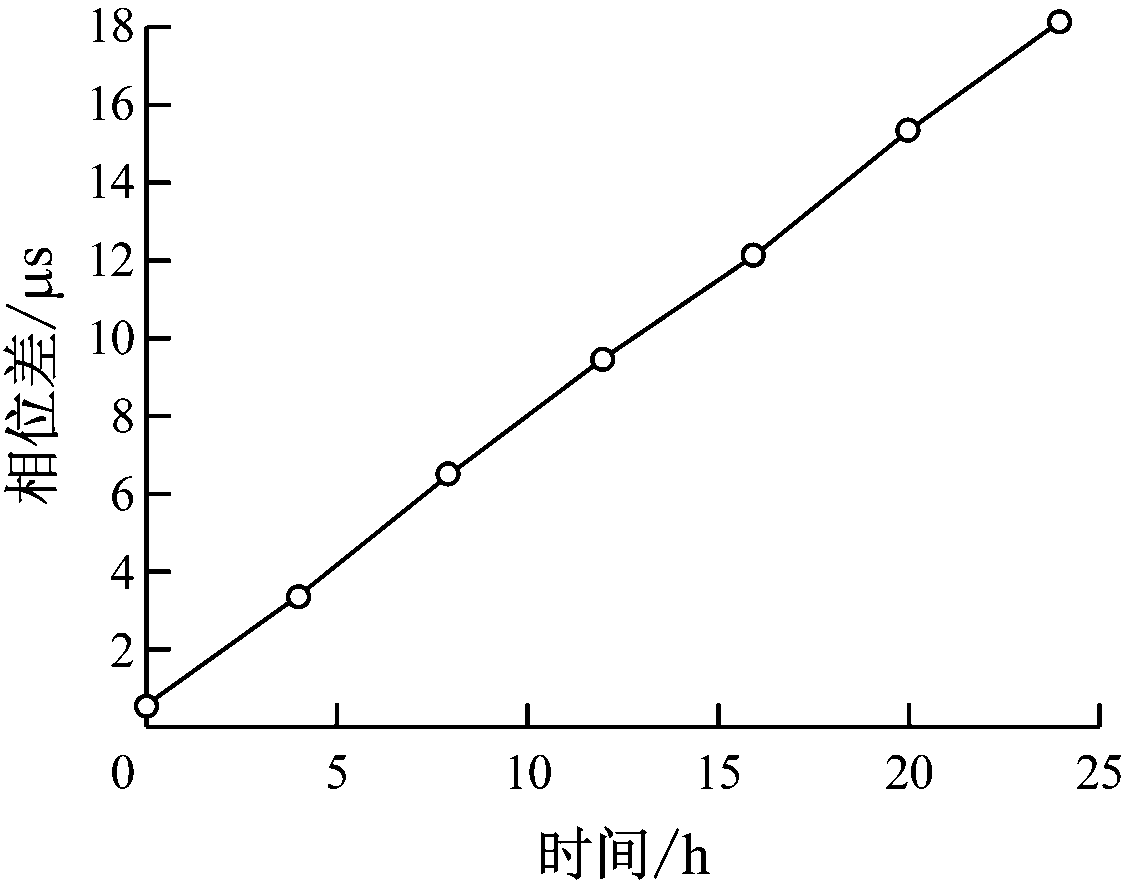
图7 2个采集终端输出时钟的相位差变化曲线
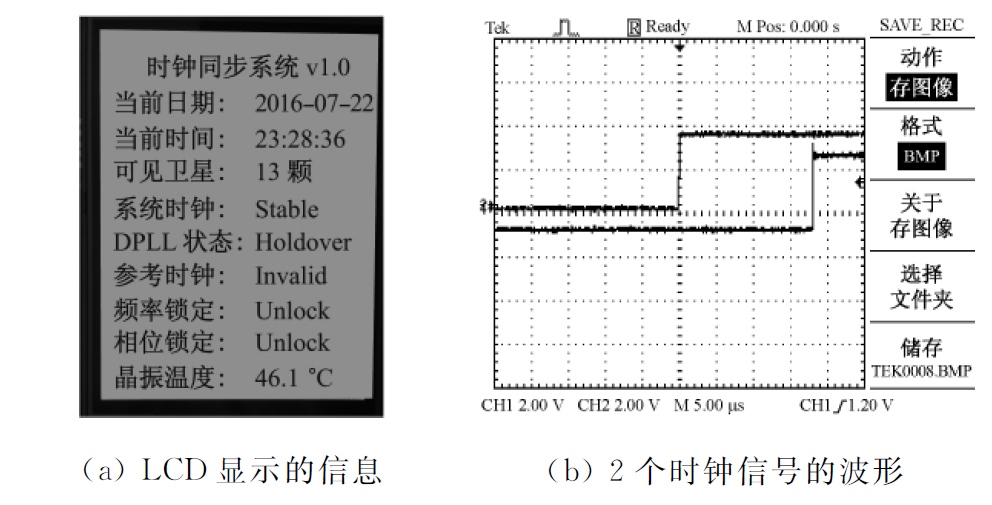
图8 LCD显示的信息及信号波形(第24 h)
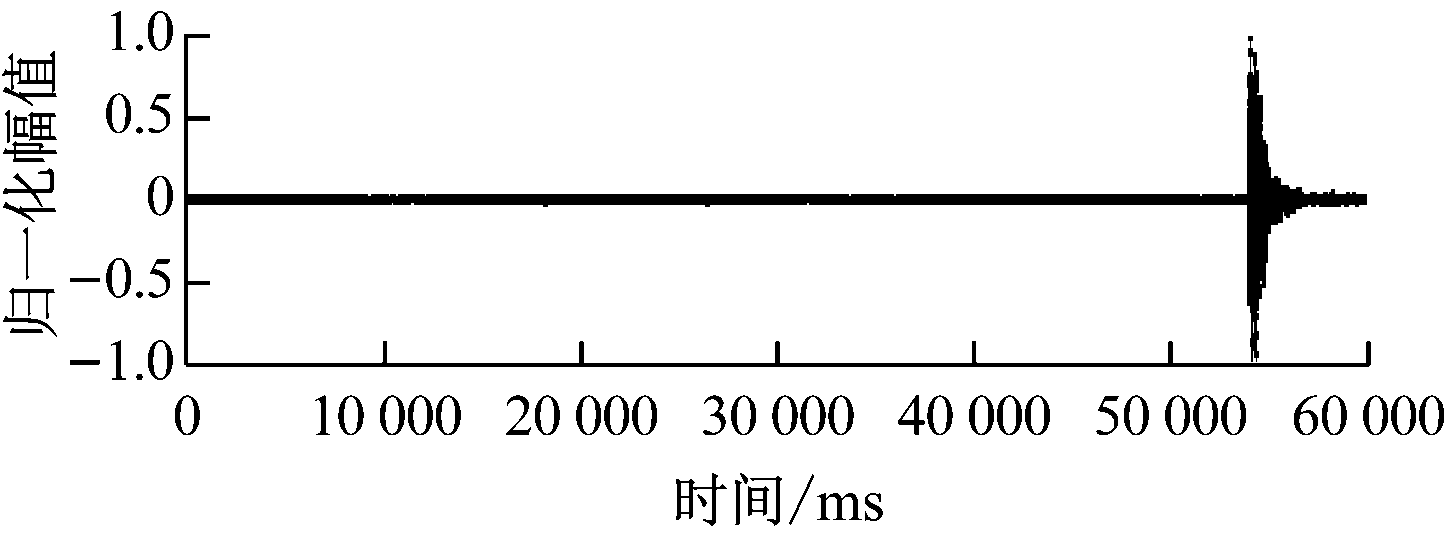
(a) X通道的槽波地震波波形
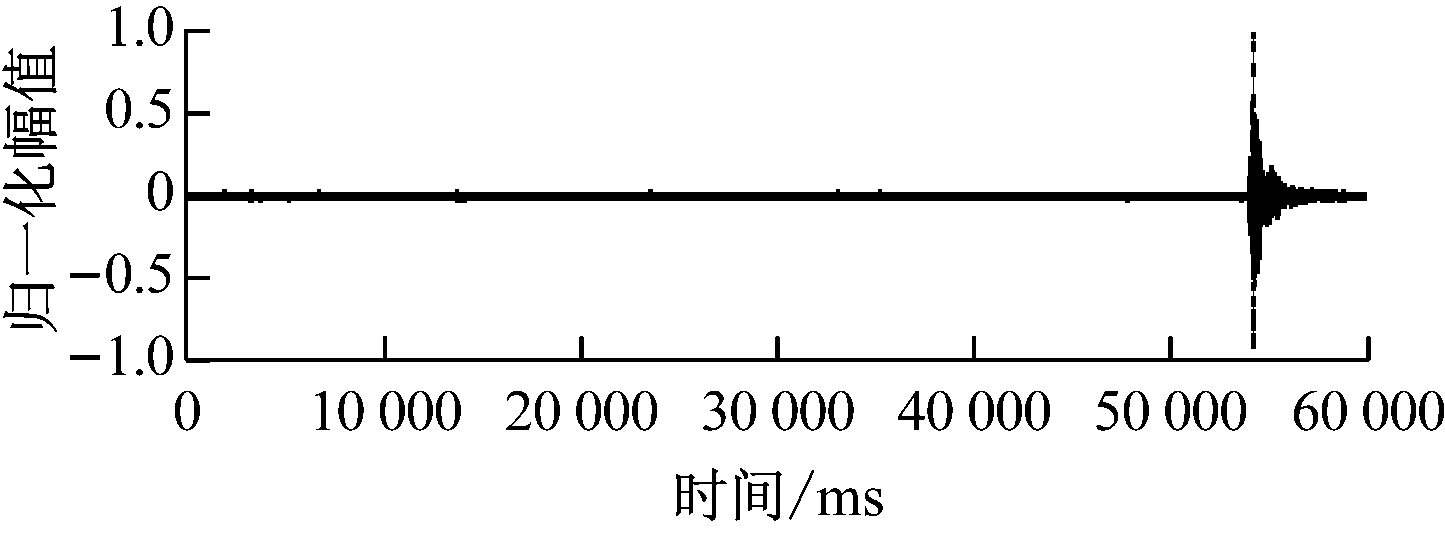
(b) Y通道的槽波地震波波形
图9 X通道和Y通道的槽波地震波波形
为解决槽波地震勘探实验中的弱信号采集与同步采集问题,设计了一种分布式的双通道槽波地震数据同步采集系统,利用弱信号调理电路实现了信号的放大和滤波,采用高精度ADC芯片实现了双通道地震信号的同步采样,搭建了基于GPS、数字锁相环及AOM驯服算法的时钟同步系统。测试结果表明,该系统采集到的信号波形完整,信噪比高,各采集终端在井下连续工作8 h的时钟同步精度优于10 μs,探测到的煤层厚度与实际挖掘验证的情况基本一致。
参考文献:
[1] 张法全,李宗敏,王国富,等.高动态范围微震信号采集系统设计[J].工矿自动化,2015,41(10):12-15.
[2] 姬广忠,程建远,朱培民,等.煤矿井下槽波三维数值模拟及频散分析[J].地球物理学报,2012,55(2):645-654.
[3] 杨思通,程久龙.煤巷小构造Rayleigh型槽波超前探测数值模拟[J].地球物理学报,2012,55(2):655-662.
[4] 胡国泽,滕吉文,皮娇龙,等.井下槽波地震勘探——预防煤矿灾害的一种地球物理方法[J].地球物理学进展,2013,28(1):439-451.
[5] 李淅龙.煤矿井下反射地震勘探技术初步研究与应用[D].西安:西安科技大学,2010.
[6] 程建远,江浩,姬广忠,等.基于节点式地震仪的煤矿井下槽波地震勘探技术[J].煤炭科学技术,2015,43(2):25-28.
[7] 高明,童子权.基于STM32的动态压力控制器设计[EB/OL].(2014-04-04)[2016-05-03].http://www.paper.edu.cn/releasepaper/content/201203-131.
[8] KITCHIN C, COUNTS L, GERSTENHABER M. Reducing RFI rectification errors in In-Amp circuits [EB/OL].(2007-05-12)[2016-07-16].http://www.analog.com/media/en/technical-docum-entation/app-lication-notes/AN-671.pdf.
[9] 赵坤.井地电位接收系统设计[D].长春:吉林大学,2008.
[10] 杨立宏.矿用微震监测系统的研究[D].淮南:安徽理工大学,2013.
[11] 孙沁梅.地震数据采集与传输系统[D].武汉:华中科技大学,2005.
[12] 盛晓红,张志刚.基于GPS的IRIG-B授时模块的设计[J].科技与企业,2012(14):113-114.
[13] 冯雪阳.基于GPS秒脉冲的恒温晶振驯服和自适应保持技术研究与实现[D].成都:电子科技大学,2014.
[14] 马彦青.恒温晶振OCXO自适应驯服保持技术研究[D].西安:西安电子科技大学,2011.
[15] 孙江涛.基于GPS的1PPS的二级频标驯服技术[D].西安:西安电子科技大学,2010.
Design of distributed synchronous acquisition system of seam seismic data
HUANG San1, ZHANG Faquan1,2, YE Jincai1, WANG Guofu1, WANG Xiaohong1
(1.School of Information and Communication, Guilin University of Electronic Technology,Guilin 541004, China; 2.Key Lab of Wireless Wideband Communication & SignalProcessing of Guangxi, Guilin 541004, China)
Abstract:In order to synchronize various collection terminals with each other and synchronize two- channel in the same collection terminal in acquisition system of seam seismic data,a distributed two-channel synchronous acquisition system of seam seismic data was designed. The system applies a weak signal conditioning circuit to improve signal-to-noise ratio of seismic signal, and uses eight-channel synchronization sampling core to realize synchronization sampling of two-channel in the same collection terminal.A clock synchronization system is constructed which is composed of GPS receiver, digital phase lock loop and STM32 main controller. The adaptive oscillator model drift correction algorithm is used to predict and estimate temperature-drift characteristic and aging characteristic of oven controlled crystal oscillator, so as to realize clock synchronization and time synchronization of various collection terminals in coal mines. The test results show that the system realizes distributed synchronous acquisition of multi-channel seismic signal, the accuracy of synchronization between the different data collection terminals is better than 10 μs within 8 hours continuous work in underground coal mine.
Key words:coal mining; seam seismic monitoring; data acquisition; synchronous sampling; AOM drift correction algorithm; OCXO
文章编号:1671-251X(2017)03-0001-06
DOI:10.13272/j.issn.1671-251x.2017.03.001
收稿日期:2016-08-08;
修回日期:2016-11-08;责任编辑:张强。
基金项目:国家自然科学基金项目(61362020,61540040);桂林电子科技大学研究生教育创新计划资助项目(2016YJCX78)。
作者简介:黄三(1990-),男,湖南岳阳人,硕士研究生,主要研究方向为信号采集与处理,E-mail:guet-huangsan@qq.com。
中图分类号:TD178
文献标志码:A
网络出版:时间:2017-02-28 16:33
网络出版地址:http://kns.cnki.net/kcms/detail/32.1627.TP.20170301.1051.001.html
黄三,张法全,叶金才,等.分布式槽波地震数据同步采集系统设计[J].工矿自动化,2017,43(3):1-6.