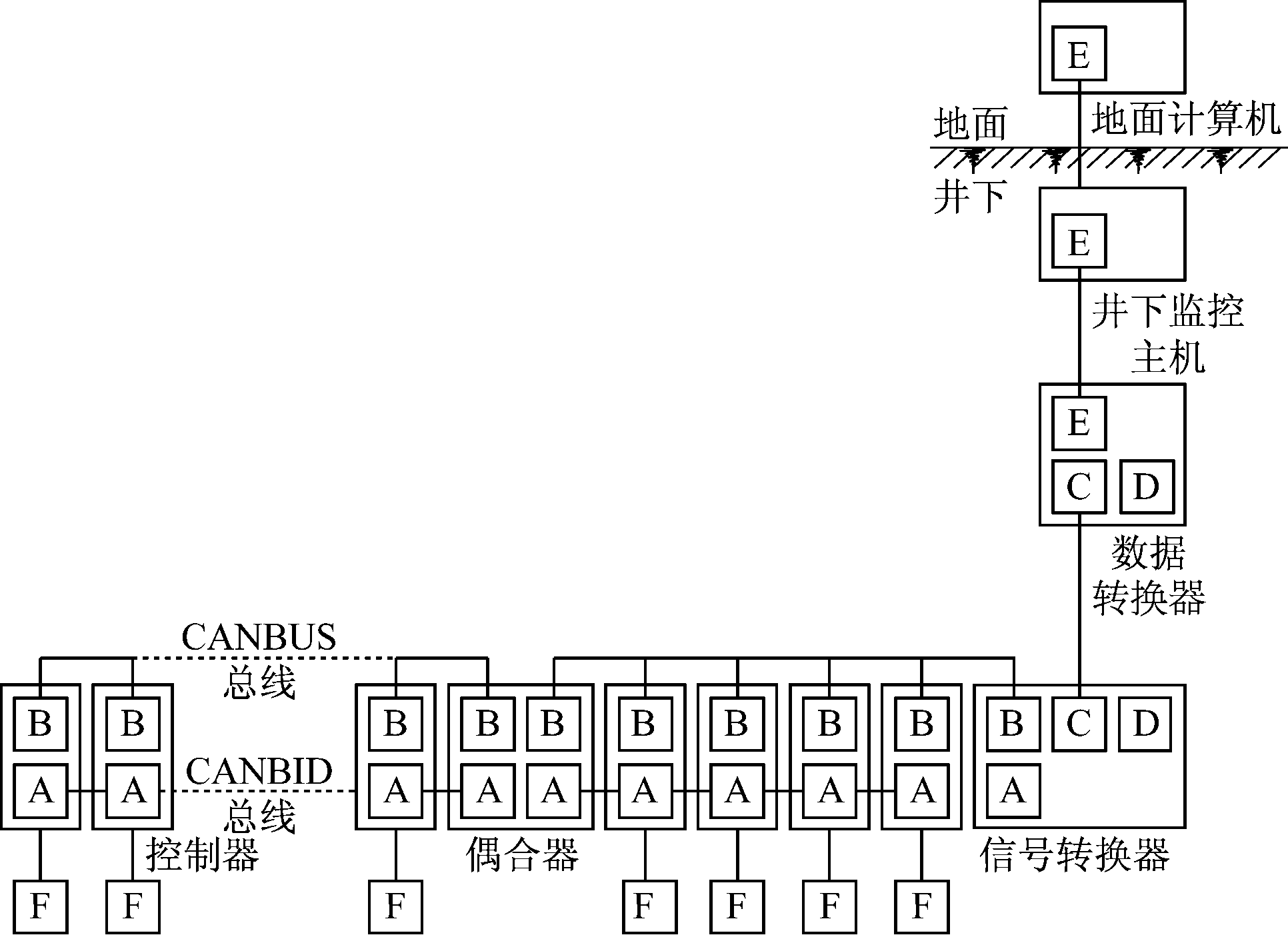
图1 液压支架电液控制系统透明通信网络系统拓扑结构
Fig.1 Topology structure of transparent communication network sytem of electro-hydraulic control system of hydraulic support
科研成果
王书明
(山西阳泉煤业集团 新元煤矿, 山西 寿阳 045400)
摘要:液压支架电液控制系统通信网络系统采用无主控制方式进行数据报送,数据生成时间、生成数量和报送时间存在不确定性, 导致通信网络系统对用户来说就像一个“黑盒子”。针对该问题,提出了一种液压支架电液控制系统透明通信网络系统设计方案。该系统通过通信状态图了解设备的互联性能,通过流量视图了解设备通信资源的使用情况,通过故障视图了解设备通信资源的可用性能及其通信路由管道管理情况。该系统以直观、可视化的方式将液压支架电液控制系统通信网络的实时性能、故障视图等呈现给用户,使通信网络透明化,可以清晰地了解系统的运行状况,及时发现通信网络存在的问题。
关键词:液压支架; 电液控制; 数据通信; 透明通信网络; 智能调度
液压支架电液控制系统已经得到了广泛的应用[1],其通信系统一般采用现场总线来实现。但由于液压支架依据采煤工艺在工作面产生的数据具有并发性特点,使得通信系统需要采用无主控制方式[2]进行数据报送,上报数据时间和报送数据量具有一定的不确定性。同时,液压支架电液控制系统通信网络检测间隔、传感器数据定时报送和增量报送参数的设置都会对通信总线的数据流量有很大影响。如果这些参数设置不当,会加重通信总线的负荷,从而出现数据传输拥堵、数据丢失的问题,使采煤机位置卡顿、跳变,跟机自动控制不稳定,支架电液控制系统通信系统资源缺乏有效的管理。若不能及时发现并排除通信故障,生产过程中将缺乏有效可用数据通信资源,通信网络系统对用户来说就像一个“黑盒子”,用户不知何时会传送数据,应该传送多少数据,通信网络运行状态是否良好,直接影响了液压支架电液控制系统的稳定性和可靠性。为此,笔者设计了一种液压支架电液控制系统透明通信网络系统。该系统实现了通信系统工作状态透明化、可视化管理,提高了液压支架电液控制系统的运行稳定性和可靠性。
液压支架电液控制系统由工作面支架控制器、偶合器、电源箱、传感器、信号转换器、数据转换器、井下监控主机和地面计算机系统等组成[3-4]。
(1) 支架控制器。支架控制器是支架电液控制系统的核心部件,有2条通信总线:一条通过邻架连接电缆,实现支架与支架之间的通信;另一条将工作面所有支架控制器通信线路连接在一起,实现支架与其他支架的相互通信[5-6],可以实现远程点对点的数据通信,实现一组特定网络支架的数据通信(成组通信),实现工作面所有支架的数据通信(广播[7])。
(2) 传感器。传感器是液压支架执行动作状态检测装置,与支架控制器相连,将液压支架动作感知数据报送到支架控制器,为液压支架动作决策提供依据。在液压支架执行动作的过程中,安装在液压支架上的传感器将数据报送到井下监控中心和地面调度室。
(3) 隔离偶合器。在煤矿井下,支架控制器的供电单元能量受一定限制,必须达到防爆标准,电源箱输出的信号为本质安全信号,一般最大信号为直流12 V,2 A,因此,一个电源箱所带的支架控制器单元一般为4~6个,在电源组之间需要通过隔离偶合器进行电气隔离,信号握手。偶合器分别与左右邻架的支架控制器的邻架通信线和总线相连,通过CPU进行信号转发。偶合器也造成了数据通信传输滞时,每个偶合器大约有3~4 ms延时,如果工作面每6架支架配置一个偶合器,一个工作面有200架液压支架[8],则最后1架通过总线传输数据到工作面第1架的时间为134 ms。如果工作面某架支架连续发送数据间隔小于4 ms时,则将产生传输数据追帧问题,即后一帧数据追上了前一帧数据,导致数据堆积在某一偶合器,轻者造成数据丢失,严重时将使通信系统短时间瘫痪,无法继续传输数据。
(4) 信号转换器。信号转换器不仅可作为工作面与井下监控主机进行远程通信的通信转换接口,同时还肩负着多重任务:① 作为网络通信检测服务单元,定时启动和触发工作面通信网络检测任务,发送工作面通信检测令牌。② 实现对工作面采煤机位置的红外信号的汇集、分析、发布任务,根据接收到的工作面采煤机位置红外信号,依据采煤机运行方向、速度和红外信号接收位置分布情况,确定采煤机位置,并将采煤机位置信息发送给工作面支架控制器。③ 实现工作面数据向井下监控主机的转发任务。④ 实现工作面液压支架电液控制系统时间和井下监控主机系统时间及地面计算机系统时间的统一,即时间同步。
(5) 数据转换器。数据转换器将从信号转换器上接收到的工作面数据转发到井下监控主机中。
(6) 井下监控主机。井下监控主机从数据转换器接收工作面报送上来的数据,实现工作面数据汇集,并集中展示工作面设备、环境、控制等方面的信息。同时,监控主机还可发送工作面液压支架远程控制命令。
(7) 地面计算机。根据井下监控主机传送的工作面数据实现对井下工作面液压支架电液控制系统的状态监视。同时,地面计算机还可发送地面远程遥控命令。为了实现地面数据与井下数据的传输同步,在数据传送时,将传送数据进行打标,标识传输数据在井下监控主机数据库中的存储位置,并逐条传送到地面计算机上。
如何把通信网络系统由“黑盒子”变为“白盒子”,使用户能够透明地观察到通信网络系统的运行状态,为此,笔者采用面向对象的方法设计了透明通信网络系统。该系统可以从不同的视角观察设备的互联属性及其视图,可以通过通信状态图了解设备的互联性能,通过流量视图了解设备通信资源的使用情况,通过故障视图了解设备通信资源的可用性能及其通信路由管道管理情况。
液压支架电液控制系统透明通信网络系统拓扑结构如图1所示。工作面数据由现场双总线构成,一条线缆(B)贯穿整个工作面,实现工作面数据的广播、成组、远程点对点的数据通信;一条线缆(A)逐架传输,工作面的数据通过端头支架信号转换器将数据接口转换为可以远程传输的RS422或双线CAN总线(C或D),以便与距离300 m处的井下监控主机进行数据交换。通过数据转换器将接收到的数据通过RS232(E)接口传输给井下监控主机,再使用交换机将工作面数据通过矿井环网或专线传送到地面计算机。每台液压支架配置多个传感器(F),通过支架控制器将液压支架的工作状态发送到井下监控中心或地面调度室[9]。
图1 液压支架电液控制系统透明通信网络系统拓扑结构
Fig.1 Topology structure of transparent communication network sytem of electro-hydraulic control system of hydraulic support
将网络通信状态检测与网络拓扑图相结合,可以使系统通信网络状态透明化地展现出来[8]。系统初步上电时,在井下监控主机屏幕上构建通信网络图,网络对象使用虚线连接,如图2所示。系统上电后,自动触发通信网络检测,逐步建立其完整的网络连接状态图,如图3—图5所示。系统运行过程中,定期检测并刷新系统通信网络状态图。
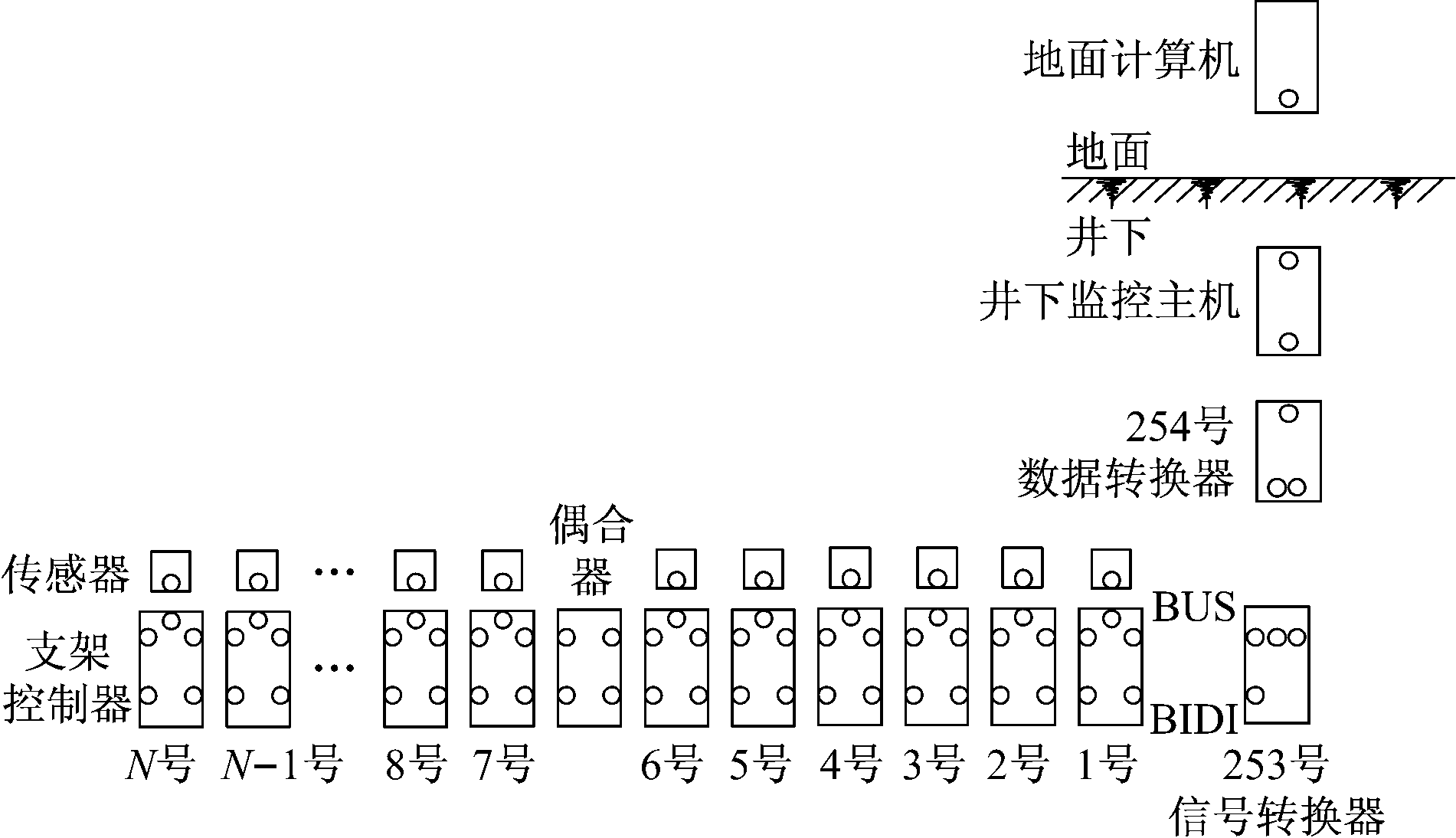
图2 通信网络设备未连接
Fig.2 No connected communication network equipment
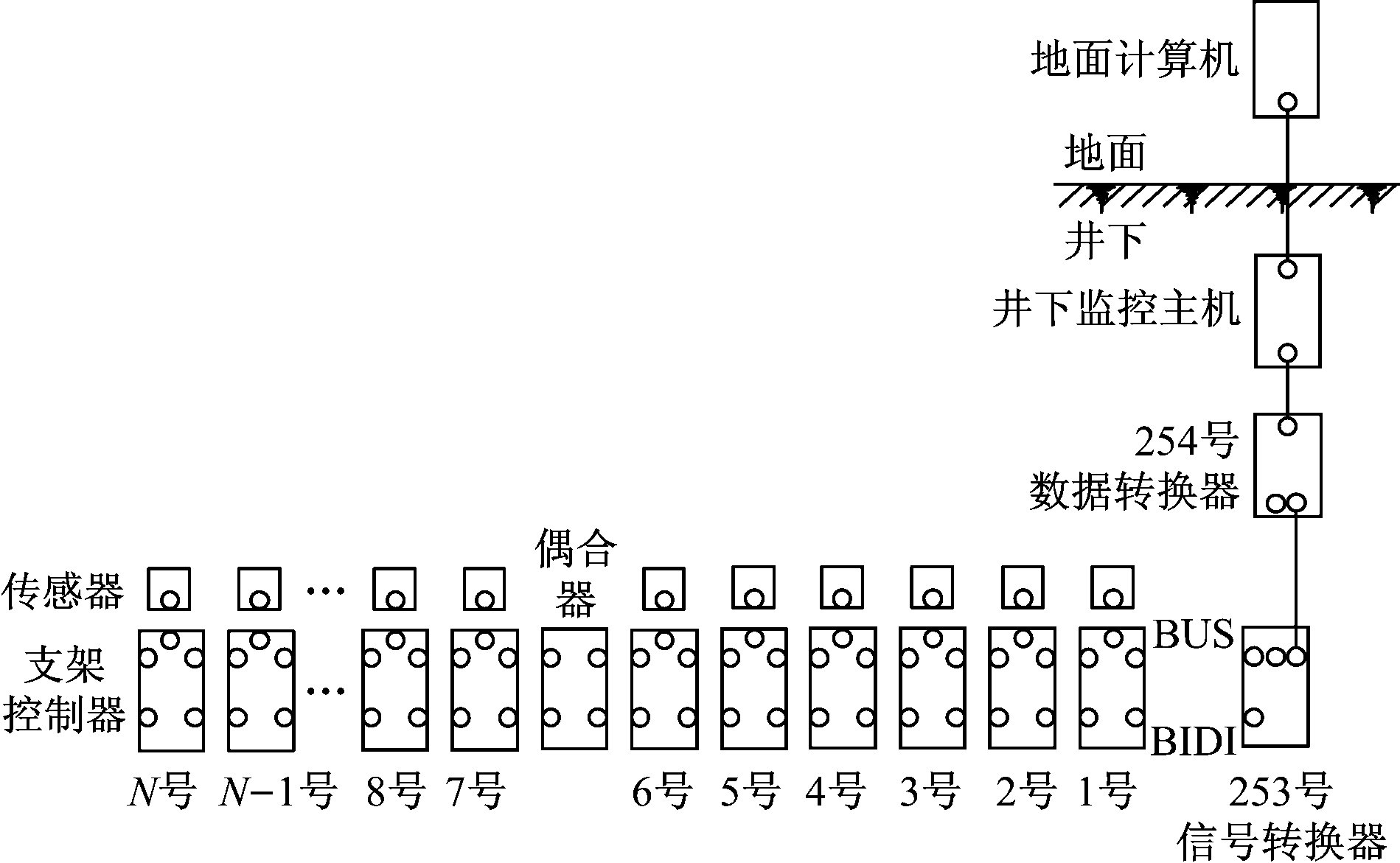
图3 通信网络设备互联视图(连接到工作面信号转换器)
Fig.3 Interconnection view of communication network equipment (connected to signal converter on working face )
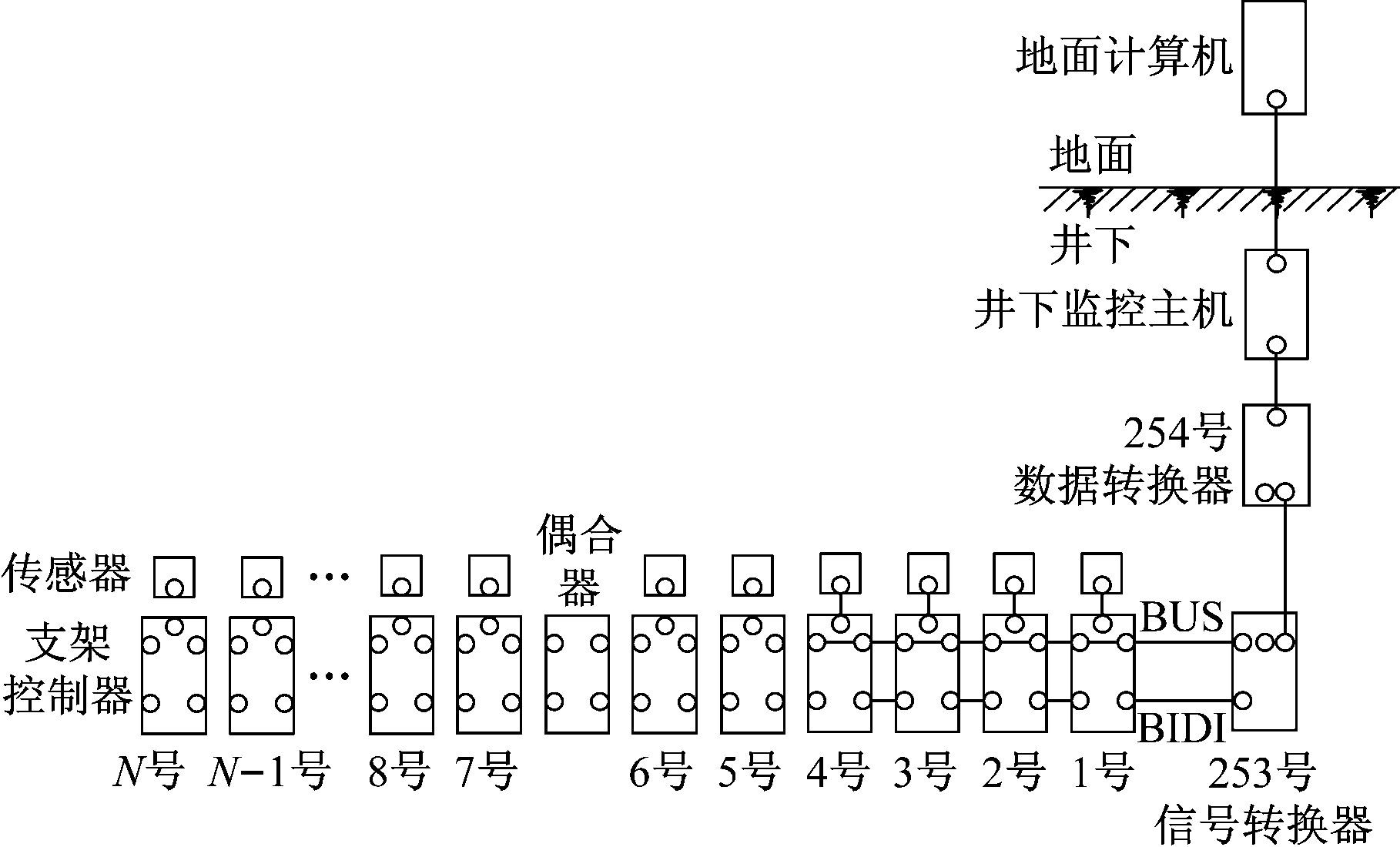
图4 通信网络设备互联视图(连接到工作面第4架 支架控制器)
Fig.4 Interconnection view of communication network equipment (connected to fourth support on working face)
液压支架电液控制系统具有双冗余的通信线路。支架动作控制以邻架通信线路作为控制主线,总线通信为辅助通信线路,当邻架线出现故障时,通过总线来完成控制命令,实现对故障点的自动识别和通信数据的智能跳传[10-11]。通信网络故障状态图使用连接符(![]() 故障,
故障,![]() 异常,
异常,![]() 正常)绘制,通过故障状态图可以直观地看到系统通信网络的故障节点,便于维修人员直接排除设备故障。同时在设备出现通信故障时,可以利用冗余的通信资源,借用另一个数据通信通道跳过故障点,实现通信数据的智能跳传[12],如图6所示。当有一个任务要求使用BIDI信号线将数据帧从5号支架控制器网络节点逐架传送到1号支架控制器网络节点时,在信号从5号支架控制器到4号支架控制器后,4号支架控制器到3号支架控制器的邻架线出现了故障,这时可以通过程序调度,改用BUS信号线缆将数据从4号支架控制器传输到3号支架控制器,然后再从3号支架控制器恢复到BIDI信号线上继续传输,最终到达目标1号支架控制器。
正常)绘制,通过故障状态图可以直观地看到系统通信网络的故障节点,便于维修人员直接排除设备故障。同时在设备出现通信故障时,可以利用冗余的通信资源,借用另一个数据通信通道跳过故障点,实现通信数据的智能跳传[12],如图6所示。当有一个任务要求使用BIDI信号线将数据帧从5号支架控制器网络节点逐架传送到1号支架控制器网络节点时,在信号从5号支架控制器到4号支架控制器后,4号支架控制器到3号支架控制器的邻架线出现了故障,这时可以通过程序调度,改用BUS信号线缆将数据从4号支架控制器传输到3号支架控制器,然后再从3号支架控制器恢复到BIDI信号线上继续传输,最终到达目标1号支架控制器。
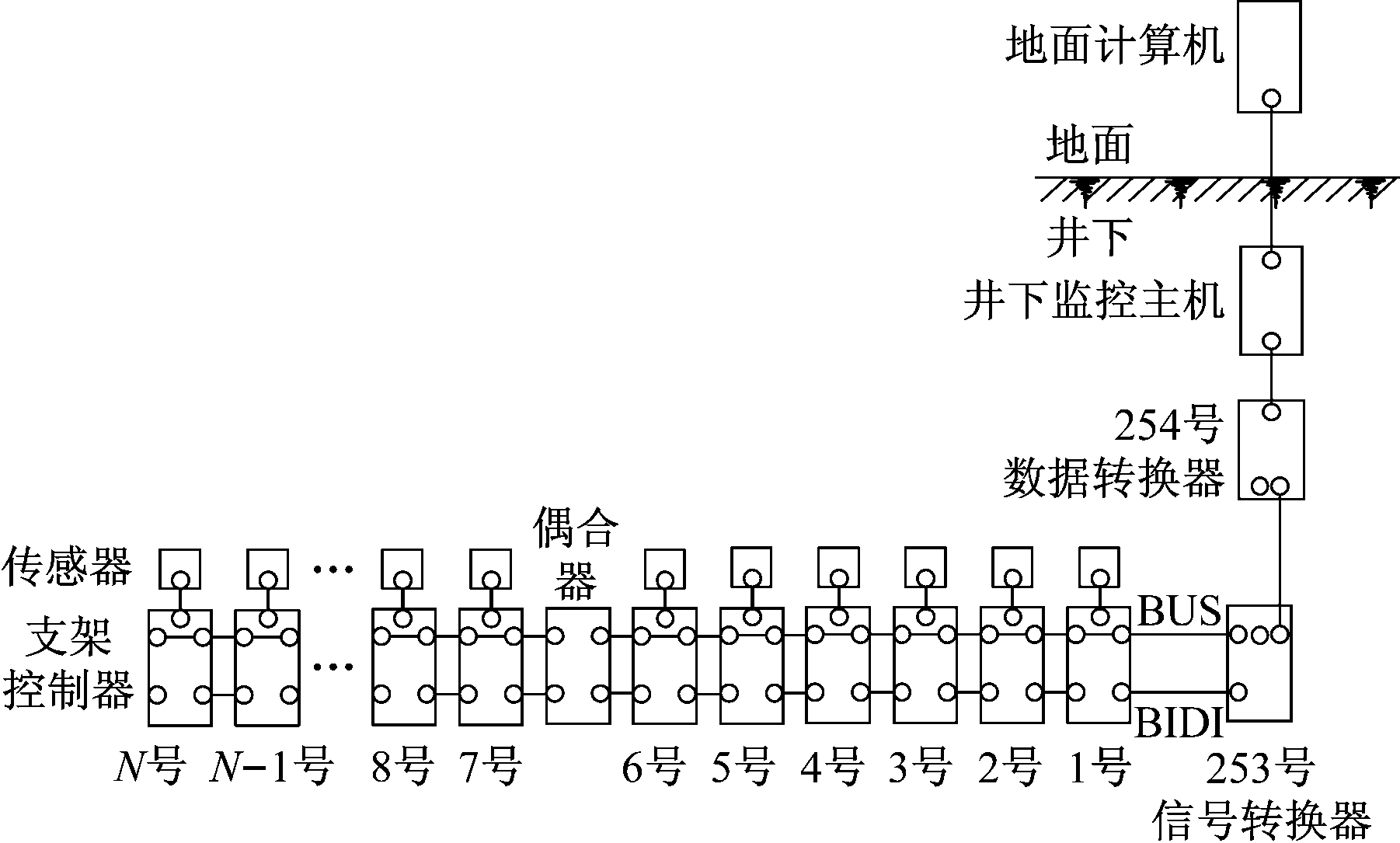
图5 通信网络设备互联视图(工作面全部建立连接)
Fig.5 Interconnection view of communication network equipment(all connections are created on working face)

图6 通信网络出现故障时通信管道路由的跳传
Fig.6 Jump of communication pipeline routing under communication network fails
依据通信线路带宽及其通信线路上传输的数据流量来构建透明通信网络系统的流量视图,如图7所示,按照通信资源利用率或占空比来判断系统通信资源状态,使用图形符号表示通信状态(良好、拥堵、堵塞),按照占用带宽、传输通信状态显示,红色表示堵塞,黄色表示拥堵,绿色表示正常。按照通道最大带宽与实际的传输数据流量带宽的比值进行展现,在拥堵时可能会发生丢包现象,在堵塞时可能会发生通信系统瘫痪现象。
偶合器中具有多个寄存器作为接收转发命令的缓冲区,在正常情况下不会有命令滞留在缓冲区中,当转发速度小于接收命令速度时,就有命令滞留在缓冲区,如果这种现象得不到缓解,将会使缓冲区填满,出现数据丢失现象,最终出现系统通信瘫痪。所以,可以将缓冲区中滞留的数据作为通信状态评判标准。当缓冲区中滞留有数据时用黄色显示,表示系统出现了拥堵情况;当缓冲区中滞留了80%数据时用红色显示,表示系统出现了堵塞情况。
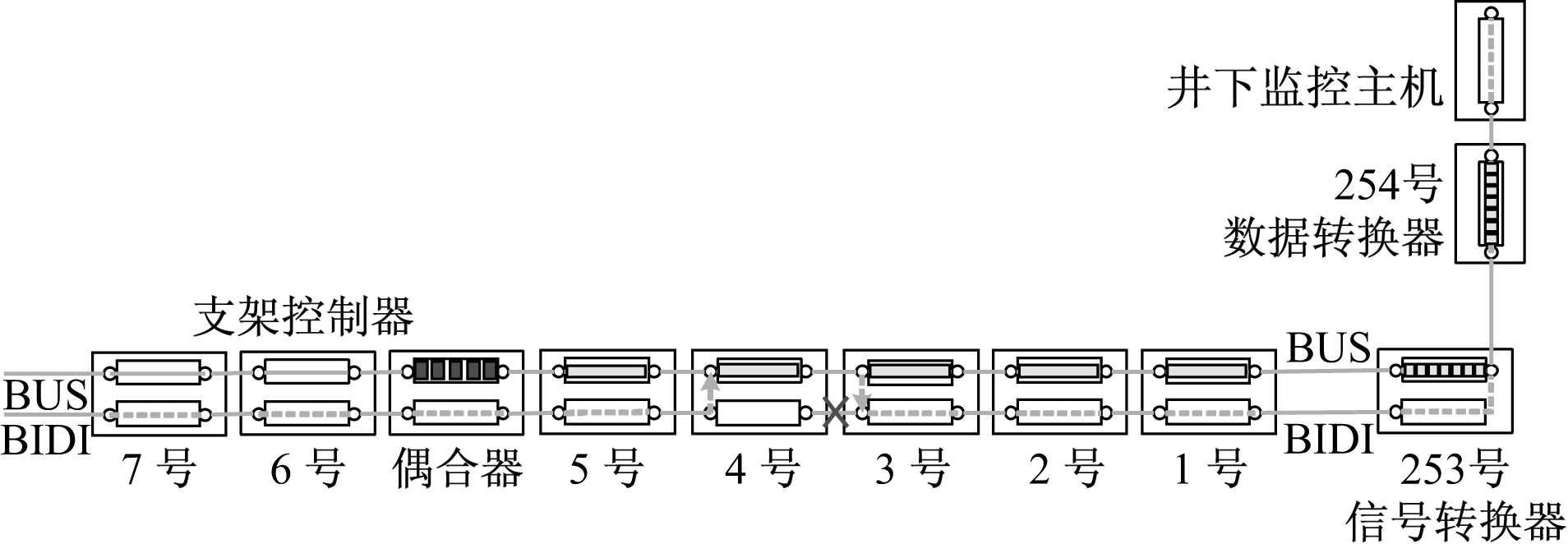
图7 透明通信网络系统流量视图
Fig.7 Flows view of transparent communication network system
信号转换器作为工作面网络通信管理单元,启动触发网络检测任务,发出工作面网络检测令牌,从1号支架控制器网络节点开始逐架通过邻架线传输通信令牌,直到最后一架,然后再从最后一架返回到信号转换器,信号转换器再从1号开始通过总线逐架传输通信令牌,直到最后一架。当出现通信故障时,将通信故障信息报送给信号转换器,然后信号转换器将故障信息报送给井下监控主机,对工作面通信网络状态图进行维护。
使用信号转换器在工作面停止割煤期间定期逐架触发工作面液压支架传感器进行数据报送,实现液压支架传感器的“平安报送”,以便了解传感器的工作状态及其互联状态,对工作面通信状态视图进行维护。
由于液压支架电液控制系统采用无主式通信方式进行数据报送,报送数据具有一定的不确定性,通信系统质量直接影响到数据传输的完整性。为此,在设计通信系统时,应设计定时定量包用于检测传输到井下监控主机的数据的完整性,如通过信号转换器触发传送传感器平安报送数据,通过比较监控主机上应接收的数据与实际接收的数据来确定系统的丢包率,以测试通信系统的传输质量,判定井下监控主机接收到的工作面数据的完整性。
液压支架在进行成组控制时,先检测成组动作的液压支架范围内通信网络状况,根据通信网络状况来确定实际执行成组动作的液压支架范围,然后再启动液压支架的成组动作控制。
根据采煤机位置,通过采煤工艺可以掌握液压支架执行动作的范围,对于未执行动作的液压支架,支架控制器处于空闲状态,可以自主式定期触发邻架通信检测命令,以判定液压支架架间电缆是否被挤断,是否出现通信故障,并通过总线报送给井下监控主机,对工作面液压支架通信状态进行维护,通信电缆断裂故障报送时间控制在1 s以内。当故障排除后,自行恢复通信状态,并利用井下监控主机刷新通信状态图。
采用面向对象的设计方法设计了液压支架电液控制系统透明通信网络系统。该系统以直观、可视化的方式将系统网络的实时性能、故障视图等呈现给用户,使通信网络系统透明化,使用户可以清晰地了解通信系统的运行状况,及时发现通信网络存在的问题。使用冗余的双总线实现了对通信管道的智能控制与通信资源的有效管理,确保了系统有可用的通信资源,保证了系统通信资源的有效利用率,提高了通信系统的可靠性。通过对通信系统的定期检测和架间线缆断裂的实时快速检测,实现了通信系统自适应管理与通信网络状态图的动态维护;通过定量包传输实现了对通信系统传输质量的定期检测。
参考文献(References):
[1] 牛剑峰. 综采液压支架跟机自动化智能化控制系统研究[J]. 煤炭科学技术,2015,43(12):85-91.
NIU Jianfeng. Study on automatic and intelligent following control system of hydraulic powered support in fully-mechanized coal mining face[J]. Coal Science and Technology, 2015,43(12):85-91.
[2] 辛致远. 电液控制系统在煤矿综采液压支架的应用[J]. 煤矿机电,2015(6):112-114.
XIN Zhiyuan. Application of electro-hydraulic control system for mine fully mechanized hydraulic support[J]. Colliery Mechanical & Electrical Technology, 2015(6):112-114
[3] 林福严,韦成龙,陶显,等. 基于RS485总线和实时数据库的液压支架远程控制系统通信设计[J]. 煤炭工
程,2015,47(1):25-27.
LIN Fuyan, WEI Chenglong, TAO Xian, et al. Communication design of remote control system for hydraulic support based on RS485 bus and real-time database[J]. Coal Engineering, 2015, 47(1):25-27.
[4] 余佳鑫,黄金福,王新军,等. 一种液压支架电液控制系统通信网络设计[J]. 机电工程技术,2014,43(4): 54-57.
YU Jiaxin, HUANG Jinfu, WANG Xinjun, et al. Design of communication network in hydraulic powered support electric and hydraulic control system[J]. Mechanical & Electrical Engineering Technology, 2014,43(4):54-57.
[5] 邱吉元.基于双CAN总线的液压支架电液控制系统设计[D].南昌:南昌大学,2009.
[6] 何秀媛. 基于CAN总线的液压支架控制系统的研究[J]. 制造业自动化,2015,37(4):151-152.
HE Xiuyuan. Research of hydraulic support computer control system based on CAN[J]. Manufacturing Automation, 2015,37(4):151-152.
[7] 王吉松. 基于CAN总线的液压支架电液控制系统节点设计[J].电脑知识与技术,2015,11(30):197-199.
[8] 侯志伟. 液压支架电液控制系统的设计[J]. 机床与液压,2010,38(14):35-36.
HOU Zhiwei. Design of electro-hydraulic control system for hydraulic support[J]. Machine Tool & Hydraulics, 2010,38(14):35-36.
[9] 伍小杰 , 程尧 ,崔建民 ,等. 液压支架电液控制系统的设计[J]. 煤炭科学技术,2011,39(4):106-109.
WU Xiaojie, CHENG Yao, CUI Jianmin, et al. Design on electric and hydraulic control system for hydraulic powered support[J]. Coal Science and Technology,2011,39(4):106-109.
[10] 王计波. 面向智能断路器的多协议通信技术研究[D]. 天津:河北工业大学,2013.
[11] 岳亮. 矿井无线通信网络多跳传输性能分析[J]. 煤炭技术,2013,32(8):196-197.
YUE Liang. Analysis of multi-hop transmission performance of coal wireless communication network[J]. Coal Technology, 2013,32(8):196-197.
[12] 李秀朋,李少辉. 一种 Ad Hoc 自组织网络系统的设计与实现[J]. 无线电工程,2014,44(8):8-10.
LI Xiupeng, LI Shaohui. Design and experimental system of high-capacity Ad Hoc self-organizing network[J]. Radio Engineering, 2014,44(8):8-10.
WANG Shuming
(Xinyuan Coal Mine , Yangquan Coal Industry Group, Shouyang 045400,China)
Abstract:Current communication network system of electro-hydraulic control system of hydraulic support adopts no host control method to transmit data, and data generation time, generation quantity and delivery time has uncertainty,so as to cause communication network system is like a "black box" for users. In order to solve the above problems, a design scheme of transparent communication network system of electro-hydraulic control system of hydraulic support was put forward. The system can understand interconnection performance of equipment through communication state diagram, understand usage of equipment communication resources through traffic view, and know availability of device communication resources and management of communication routing pipelines through fault views. The system uses intuitive and visual way to display real-time performance and fault view of communication network of electro-hydraulic control system of hydraulic support for users, and makes the system transparent. The communication network system can also clearly understand the running status of electro-hydraulic control system of hydraulic support, and find problems existed in communication network timely.
Key words:hydraulic support; electronic-hydraulic control; data commntcation; transparent communication network; intelligent scheduling
文章编号:1671-251X(2017)12-0006-05
DOI:10.13272/j.issn.1671-251x.2017.12.002
中图分类号:TD355
文献标志码:A 网络出版时间:2017-12-06 09:33
网络出版地址:http://kns.cnki.net/kcms/detail/32.1627.TP.20171205.1751.020.html
收稿日期:2017-07-26;
修回日期:2017-10-13;责任编辑张强。
基金项目:山西省煤基重点科技攻关项目(MJ2014-08)。
作者简介:王书明(1968-),男,山西阳泉人,高级工程师,现主要从事综采自动化系统、矿井综合自动化系统的现场实践工作, E-mail: 759895019@qq.com。
引用格式:王书明.液压支架电液控制系统透明通信网络系统设计[J].工矿自动化,2017,43(12):6-10.
WANG Shuming. Design of transparent communication network system of electro-hydraulic control system of hydraulic support[J].Industry and Mine Automation,2017,43(12):6-10.