图1 RSSI方法
科研成果
包建军1,2
(1.中煤科工集团常州研究院有限公司, 江苏 常州 213015;2.天地(常州)自动化股份有限公司, 江苏 常州 213015)
摘要:在分析主流接近探测技术特点和应用现状的基础上,提出基于高精度无线测距和三维定位的井下装备接近探测方法。该方法用对称双向到达时间无线测距方法测量个人标签到探测器的距离,通过三维最小二乘法计算个人标签相对于移动设备的精确坐标,最后通过区域设定和判断得出探测结果。现场试验结果表明,该方法可以实现设备周边360°无死角探测,与RSSI方法和磁场区域标识方法相比,具有定位精度高、响应时间短、配置简便等特点。
关键词:接近探测; 无线测距; 精确定位; 碰撞避免
随着采煤自动化技术与装备的发展,连续采煤机、掘锚机、梭车、锚杆机、破碎机等多种井下移动设备已经广泛使用于采掘工作面。大型移动设备的使用在提高煤矿生产率的同时,也带来安全隐患:由于井下作业空间狭小、光线不足、设备体积噪声大,操作人员往往视线、听力受阻,极易造成设备对人员的挤压伤害事故。
据美国联邦矿山安全健康局(MSHA)技术报告,自1984年在井下推广使用远程遥控连续采煤机以来,至2010年美国煤炭行业已发生33起因采煤机挤压或撞击引起的死亡事故,梭车发生12起死亡事故,其他移动设备如掘锚机、锚杆机、铲斗车也存在不同程度的伤人或者撞车事故。澳大利亚2011年统计数据表明,连续3年煤矿井下作业共发生伤害事故4 633起,其中与设备相关的有2 149起,约占总数的46%[1]。
本文首先分析了当前主流的移动设备接近探测系统实现原理,讨论其在应用时的局限性;继而提出基于高精度无线测距和三维定位实现接近探测的方法,通过解析系统关键技术的实现、分析比较试验结果,证明所提方法的可行性和有效性。
露天矿移动设备接近监测系统通常采用GPS和毫米波雷达技术[2]。但是,这种技术无法应用在井下,因为井下没有GPS信号,而雷达波因为空间狭窄和多径反射容易造成误判,较难实际应用。其他如图像识别技术(Image Recognition,IM)、激光探测与测量(Light Detection and Ranging,LiDAR)技术[3-5]虽然在地面无人驾驶领域广受关注,但由于井下光线与煤尘影响,实际效果满足不了应用需求。目前主流技术主要有两类:基于RFID的接收信号强度指示(Received Signal Strength Indication, RSSI)方法和磁场区域标识(Magnetic Field Marker)方法。
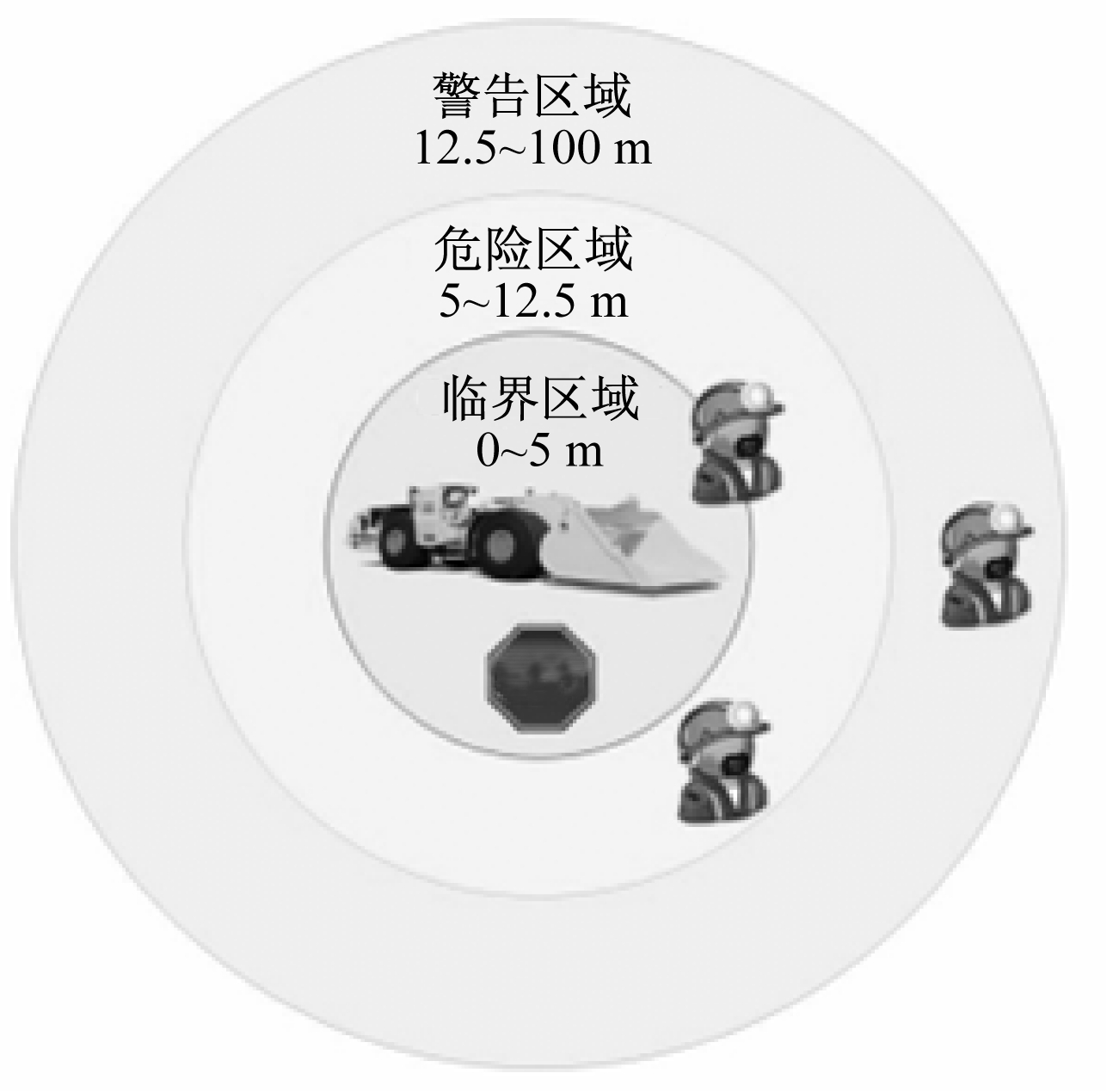
采用RSSI技术的代表性产品是CAS(Collision Avoidance System)系统[2]。CAS系统采用433 MHz的RFID标签,标签识别距离在5~100 m内可调,安装在机械设备上的接收器通过监测标签识别矿工是否进入危险区域,从而达到防碰撞的目的,如图1所示。
RSSI方法依据无线信号的传输损耗模型判断个人携带的标签与移动设备间的距离,测量精度比较低,平均误差通常超过5 m,区域范围仅能用同心圆来粗略设定,因此,一般利用RSSI方法设计接近警告系统。因无法在设备上精确设定操作区域,所以,RSSI方法不能实现自动停机。
图1 RSSI方法
采用磁场区域标识方法的产品以HazardAvertTM系统为代表[6]。该系统采用称为Generator的装置产生椭圆体磁场覆盖,多台Generator装置可以在移动装备周边建立复杂的三维磁场区域。每个井下作业人员随身佩戴个人警告装置(Personal Alarm Device,PAD),PAD一旦进入磁场标识区域,就会被系统精确识别,如图2所示。
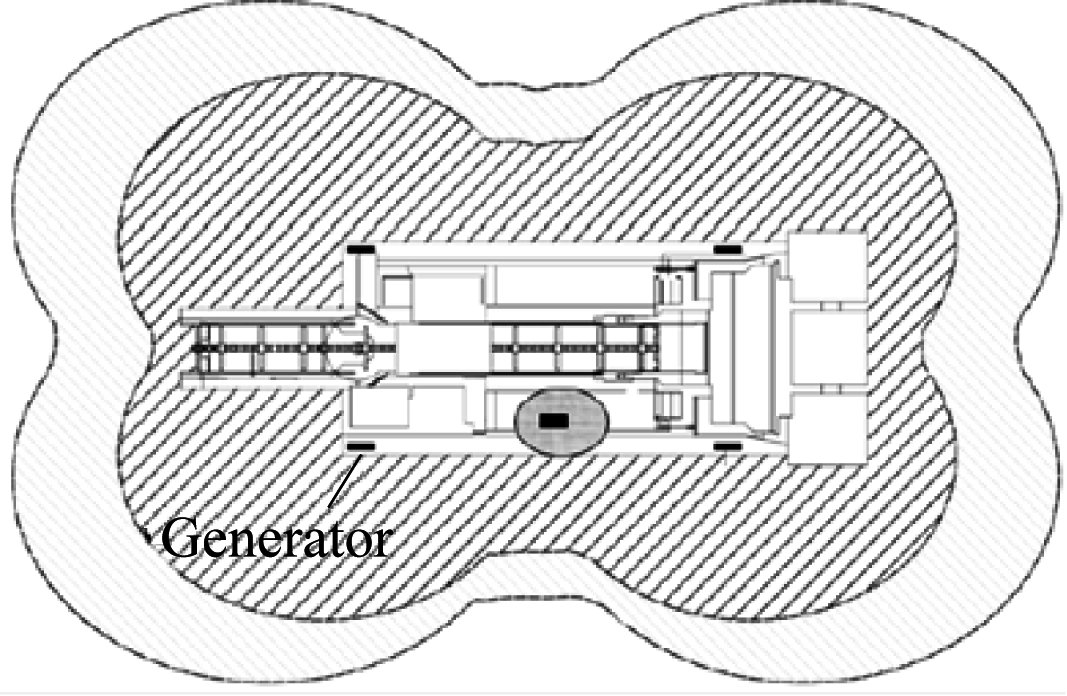
图2 磁场区域标识方法
磁场区域标识方法的位置探测精度可以达到1 m以内,但是由于每个Generator装置仅能建立椭圆体区域,多个区域重叠形成的磁场覆盖形状具有局限性,并且限制了Generator装置在设备上的安装位置,系统的灵活性和可靠性受到很大的约束,另一方面,由于Generator使用的是低频电磁场,容易受到采煤现场变频器等设备的干扰,从而影响实际使用效果。
高精度无线定位接近探测方法是通过在设备上安装多台无线定位探测器、作业人员携带定位标签实现的。该方法包括3个主要步骤:① 用对称双边双向到达时间(Symmetric-Double-Sides Two-Way Time-of-Arrival,SDS-TW-TOA)无线测距方法[6]测量个人标签到每一个探测器的距离。② 以设备中心为三维坐标原点,通过三维最小二乘法(Least Square,LSQ)[7-8]计算个人标签相对于移动设备的精确坐标。③ 判断个人标签坐标所处位置,作出警告或停机动作。
2.1 SDS-TW-TOA无线测距
假定需要测量节点A与B之间的距离,节点A向节点B发送测距帧R1,节点B向节点A返回响应帧R2,节点A向节点B发送二次响应帧R3,节点A与B之间的距离可用式(1)求得。
(1)
式中:c为电磁波传播速度常数,c=3×108m/s;Tab为节点A自发出测距帧到收到响应帧间的时间延迟;Tba为节点B自发出测距响应帧到收到二次响应帧间的时间延迟;Tdb为节点B自收到测距帧到发出响应帧间的时间延迟;Tda为节点A自收到测距响应帧到发出二次响应帧间的时间延迟。
SDS-TW-TOA无线测距方法的优点:根据电磁波传输时间推算距离,由于在直线距离上电磁波传输时间最短,所以能够有效克服电磁波传输中的多径效应;采用双向对称方法测量,可以有效排除测算误差,从而提高整体测量精度。
2.2 三维LSQ定位
设个人标签的待测坐标![]() T,定位探测器k的坐标
T,定位探测器k的坐标![]() T,k≥3,待测标签到定位参考点k的距离为dk,则求解坐标P的算法如下所述。
T,k≥3,待测标签到定位参考点k的距离为dk,则求解坐标P的算法如下所述。
根据个人标签到各定位探测器的距离,考虑三维平面定位环境,可得k+1个距离方程:
(2)
展开式(2)后,用三维LSQ算法得到坐标P:
(3)
矩阵A为
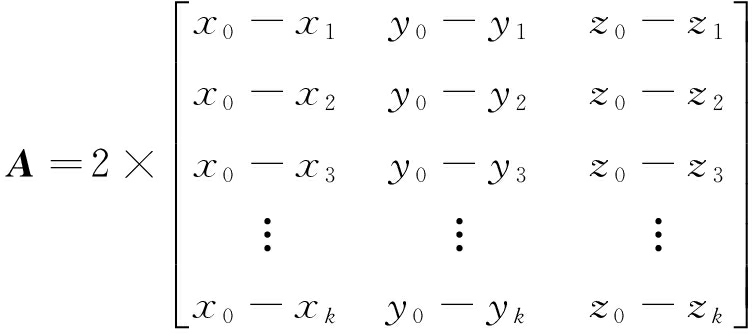
(4)
矩阵B为
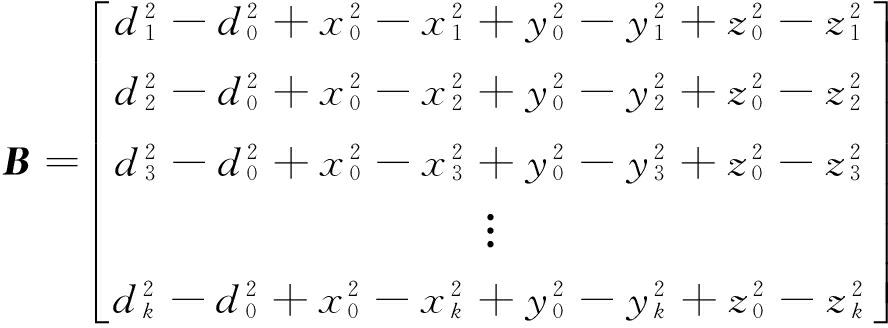
(5)
2.3 区域设定与判断
由于个人标签相对于设备的位置已经精确计算出来,所以,区域可以设定成任意多边形并作为参数配置保存于设备的存储器中,一个典型的设定方案如图3所示。
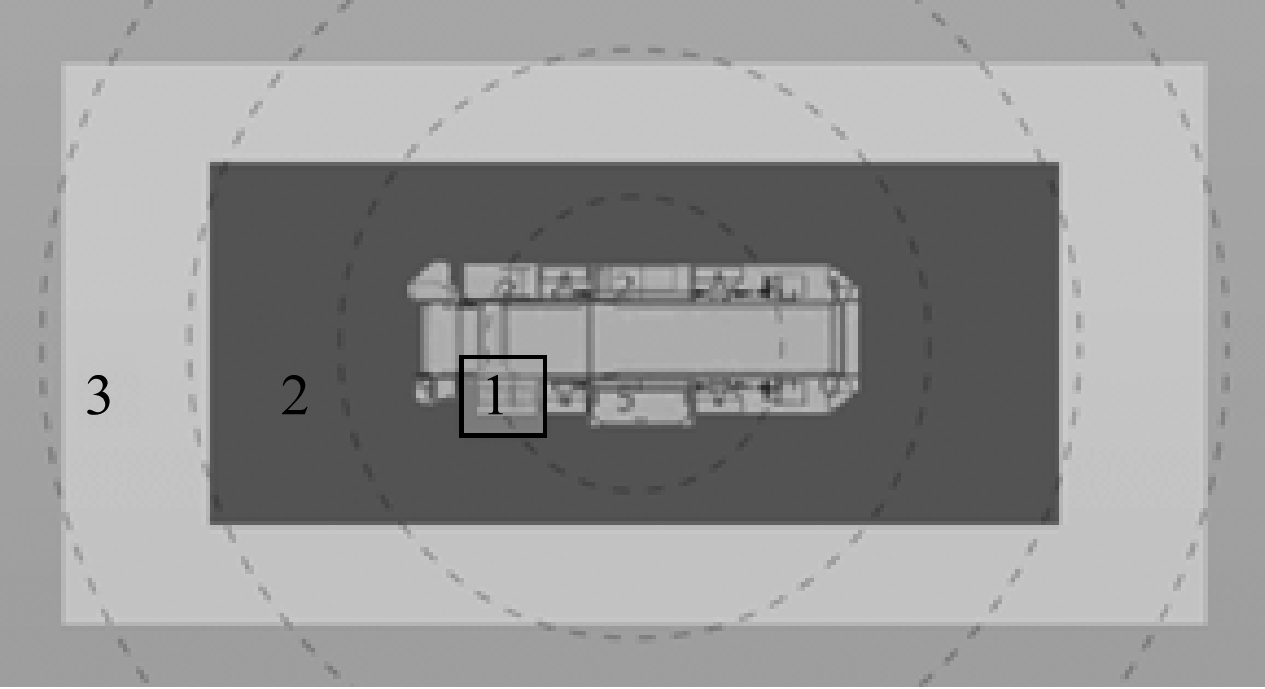
图3 区域设定与判别
图3的中心区域是一台梭车的俯视图,在梭车的驾驶室内标号为1的区域为操作区域,当标签处于该区域时,设备正常运行;标号为2的区域为危险区域,当标签进入该区域时,设备自动停机;标号为3的区域为警告区域,当标签进入这个区域时,系统发出双向预警。
接近探测装置共包括4种设备,分别为控制器、探测器、显示器和集成个人标签的信息化矿灯,如图4所示。
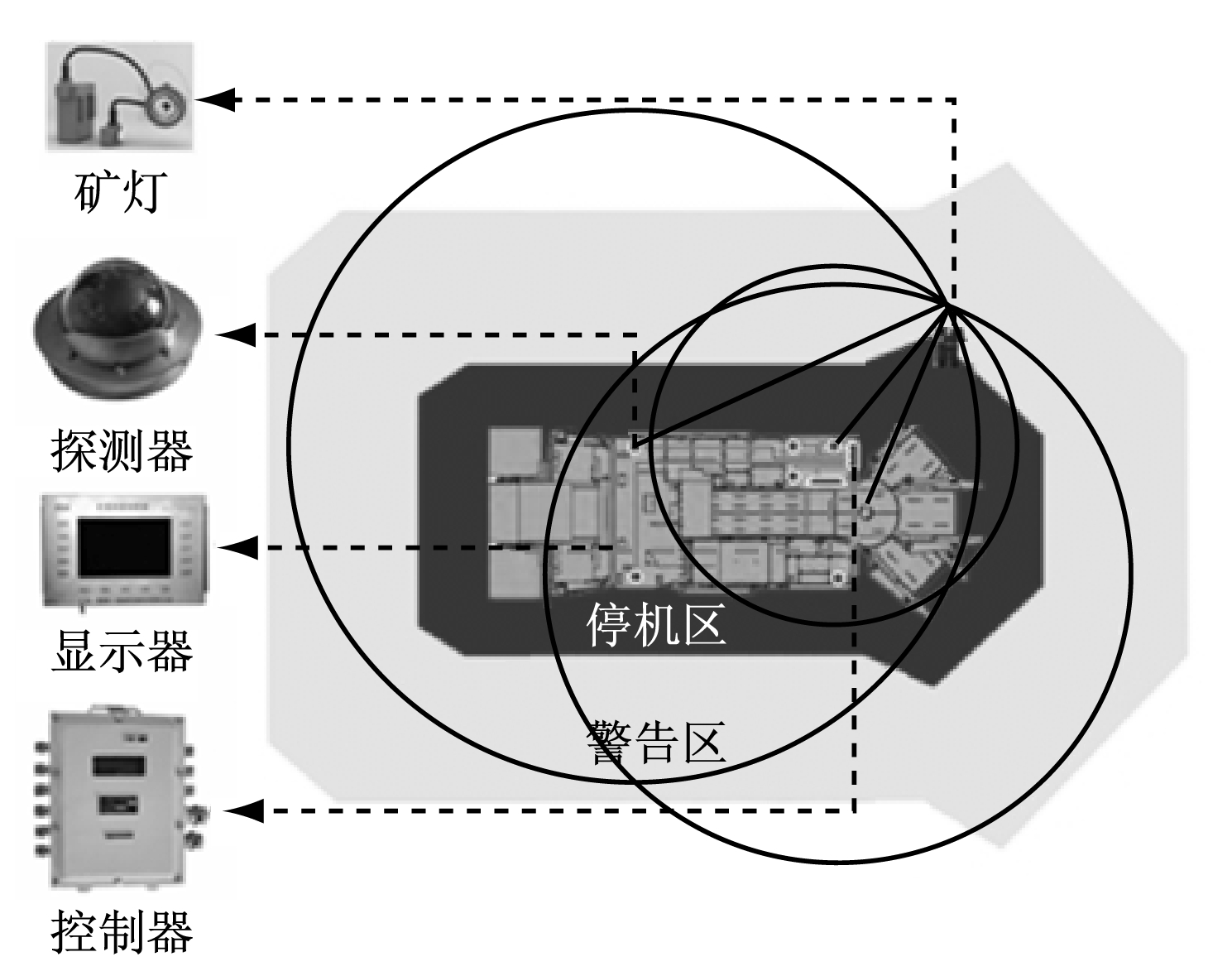
图4 接近探测装置
控制器是接近探测装置的核心,采用127 V交流供电,负责向探测器供电并传输定位信息与动作指示;探测器负责与个人标签通信并实现无线测距功能,同一台设备上可以安装多台探测器;显示器用来向驾驶员输出设备周围人员实时位置信息及装置工作状态。
为了检验本文方法的可行性和有效性,设计了全套接近检测装置,车载控制器设计为隔爆兼本质安全型,探测器、显示器和信息化矿灯均设计为本质安全型。控制器和探测器硬件部分采用基于ARM7的多任务Embedded OS,显示器采用基于Android的移动嵌入式平台。
试验在神华神东煤炭分公司乌兰木伦煤矿进行,该矿采用斜井、平硐联合开拓布置方式,生产布局为一井一面。试验时在掘进工作面梭车和连续采煤机上各安装了一套装置。
试验所用的梭车型号为JOY-10SC32,一共安装有1台控制器、6台探测器和1台显示器。操作区域为驾驶室俯视平面范围,停机区域为梭车前后4 m、两侧2 m范围,警告区域为梭车前后6 m、两侧34 m范围(图3)。
试验所用的连续采煤机型号为JOY-12CM15,一共安装有1台控制器、4台探测器和1台显示器,操作区域同样为驾驶室俯视平面范围,停机区域为连续采煤机周边5 m范围,警告区域为连续采煤机周边7 m范围(图4)。
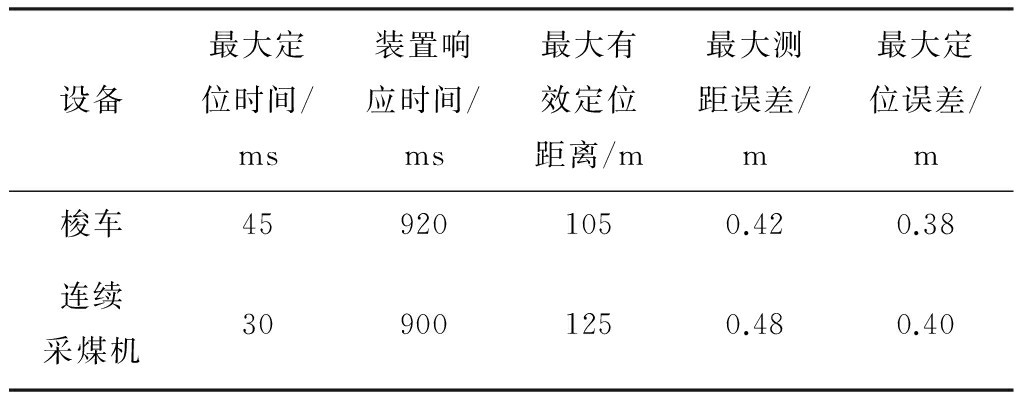
试验过程中分别以10台信息化矿灯,从每个装备自身和周边不同位置进行测试和统计,试验结果见表1。从表1可以看出,本文所提方法的定位精度可达0.5 m以内,定位距离可达100 m,响应时间可达1 s以内,能够满足煤矿安全生产对于井下设备接近探测的应用需求。
表1 接近探测方法试验结果
提出了高精度无线定位接近探测方法,并在乌
兰木伦煤矿进行了全面试验。试验结果表明,基于SDS-TW-TOA无线测距、三维LSQ定位和设备区域划分与判定的接近探测方法实现了煤矿井下设备接近探测及设备周边360°无死角探测,解决了视频监控方式的局限性问题[9],与RSSI方法和磁场区域标识方法相比,具有定位精度高、响应时间短、区域设定参数化、实用性强等特点。后续工作将着重在增加系统容量、选择优化算法以提高定位可靠性等方面做进一步研究。
参考文献:
[1] BURGESS-LIMERICK R. Injuries associated with underground coal mining equipment in Australia[J].The Ergonomics Open Journal, 2011, 4(Suppl 2-M2): 62-73.
[2] 韦海良, 郭安斌, 董文斌,等. 矿用卡车毫米波雷达防碰撞系统的研究与应用[J].煤矿安全,2015, 46(增刊1):43-47.
[3] REINA G, UNDERWOOD J, BROOKER G, et al. Radar-based perception for autonomous outdoor vehicles[J]. Journal of Field Robotics, 2011, 28(6):894-913.
[4] DANESCU R, NEDEVSCHI S. Probabilistic lane tracking in difficult road scenarios using stereovision[J]. IEEE Transactions on Intelligent Transportation Systems, 2009,10(2):272-282.
[5] ROTARU C, GRAF T, ZHANG J. Color image segmentation in HSI space for automotive application[J]. Journal of Real-Time Image Processing, 2008,3(4):311-322.
[6] LI Jingcheng, CARR J, JOBES C. A shell-based magnetic field model for magnetic proximity detection systems[J]. Safety Science, 2012,50(3): 463-471.
[7] 包建军,霍振龙,徐炜,等.一种高精度井下人员无线定位方法[J].工矿自动化,2009,35(10):18-21.
[8] 王福豹, 史龙, 任丰原. 无线传感器网络中的自身定位系统和算法[J]. 软件学报,2005,16(5):857-868.
[9] GODWIN A, SCHWABE N. Using a case study fatality to depict the limits of proximity detection systems for articulating, underground machinery[J]. Safety Science, 2016,87:47-52.
BAO Jianjun1,2
(1.CCTEG Changzhou Research Institute, Changzhou 213015, China;2.Tiandi(Changzhou) Automation Co., Ltd., Changzhou 213015, China)
Abstract:Based on analysis of different properties and application status of mainstream proximity detection methods for machines in coal mine, a novel proximity detection method using high wireless precision ranging and three-dimensional location technology was proposed. The method uses wireless distance measurement method SDS-TW-TOA to measure distance between personal tag and detector, calculates precise coordinates of personal tag relative to mobile device through three-dimensional least squares method, and finally obtains detection result through regional setting and judgment. Field test results show that the proposed method can achieve 360° detection around the equipment, and has characteristics of high positioning accuracy, short response time and convenient configuration compared with RSSI method and magnetic field marker method.
Key words:proximity detection; wireless ranging; precision location; collision avoidance
文章编号:1671-251X(2017)01-0001-04
DOI:10.13272/j.issn.1671-251x.2017.01.001
收稿日期:2016-12-06;
修回日期:2016-12-16;责任编辑:胡娴。
基金项目:中国煤炭科工集团科技创新基金项目(2016MS019)。
作者简介:包建军(1975-),男,江苏如皋人,高级工程师,硕士,主要研究方向为煤矿网络通信与自动化,E-mail:baojj@tom.com。
中图分类号:TD655.3
文献标志码:A
网络出版:时间:2016-12-30 09:29
网络出版地址:http://www.cnki.net/kcms/detail/32.1627.TP.20161230.0929.001.html
包建军.煤矿井下装备接近探测方法研究[J].工矿自动化,2017,43(1):1-4.