(a)Solidworks结构(b)测试样机
翟国栋, 苏一新, 高培源
(中国矿业大学(北京) 机电与信息工程学院, 北京 100083)
摘要:为了提高探测机器人的智能化,设计了一种以ARM架构为核心的电气系统。该系统采用2.4 GHz无线通信、电动机闭环控制、多自由度机械臂控制以及多传感器信息融合等技术,实现了避障、越障、定位、通信、传感器测量等功能;利用光伏效应和改进爬山法进行最大功率点追踪,解决了探测机器人能耗问题。
关键词:探测机器人; 电气系统; 光伏发电; MPPT
网络出版地址:http://www.cnki.net/kcms/detail/32.1627.TP.20160705.1505.020.html
探测机器人是用于在危险区域与复杂地形执行目标物及环境探测任务的地面移动平台[1],是现代传感技术、检测技术、人工智能、自动控制、机构学、信息技术及计算机技术等多学科、高新技术的结晶,不仅在空间、军事、消防、采矿、林业、勘探等领域发挥着重要作用,而且与相关学科的发展也有很大关系,具有重要研究意义。
探测机器人主要依赖自身电气硬件系统,配合相应软件实现避障、越障、定位、通信、传感器测量等功能。笔者设计了一种探测机器人电气系统,并完成了样机制作。
探测机器人的机械构造决定了其运动性能的好坏,本文基于结构力学和动力学的相关理论,针对复杂未知的地形,设计了一种六轮摇臂悬架行走机构;经运动学分析,推导出了探测机器人在任意运动位置时质心域的计算公式;利用Matlab软件进行了实体分析与优化,用Adams进行了动力学建模与仿真分析,验证了优化结果。
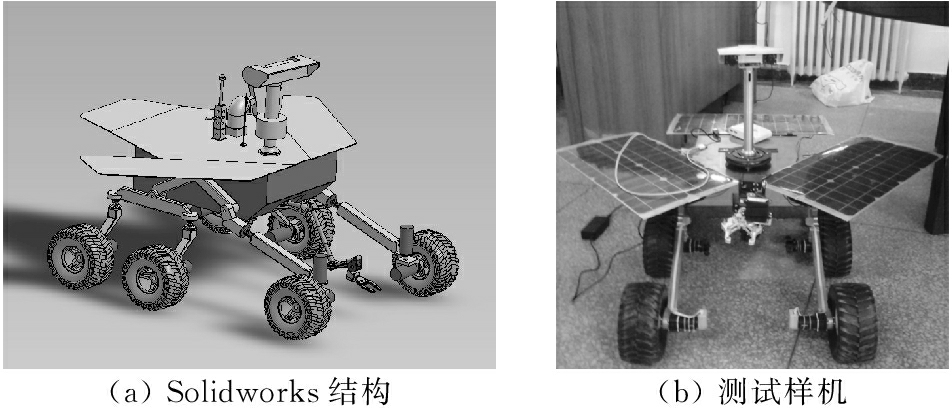
探测机器人基本结构由中心车体和两侧的摇臂悬架2个部分组成[2] ,如图1所示。机器人两侧的摇臂悬架能够紧贴路面行走,运行平稳。机器人采用六轮独立闭环驱动,驱动能力强,轮胎采用特殊材料避免迅速老化,通过六轮差速控制算法实现机构转向。在机器人的正前方搭载了6自由度机械臂,以实现样本采集工作,其结构如图2所示。其中OR,D2,P2为机器人坐标系;l1—l5为各杆长;b为半个车体的宽度;β2为右摇臂绕车体转动的角度;r为车轮半径;α1,α2为D2的Z轴与前臂形成的2个夹角。
图1 探测机器人Solidworks结构及测试样机
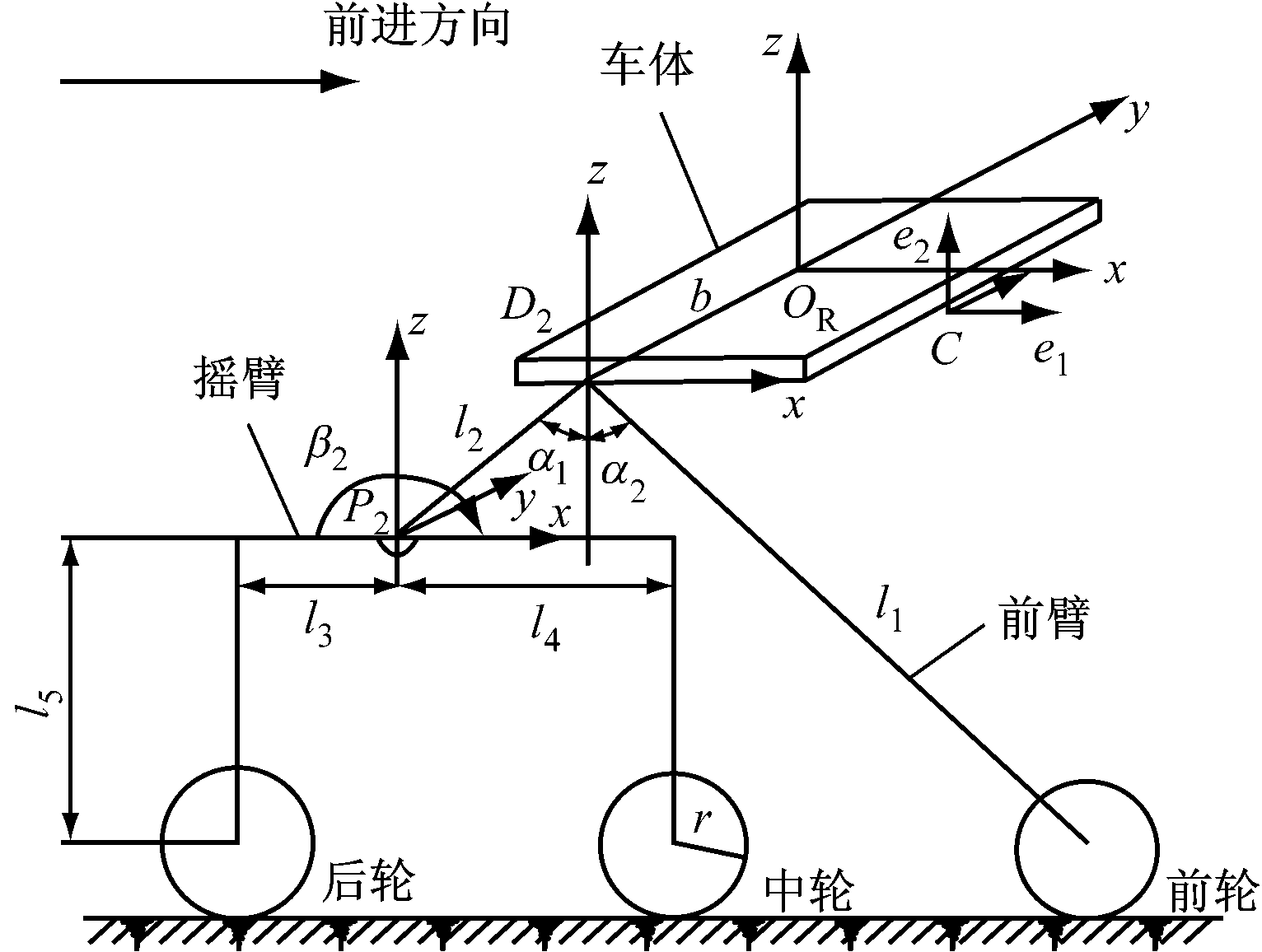
图2 探测机器人结构
探测机器人电气系统功能要求:为了安全和便于控制,要求机器人能够精确闭环控制行进距离、行进速度,能准确自我定位和远程实时通信;为了提高探测深度,要求机器人具备视觉采集、反馈控制与存储,周围环境信息采集存储、样本采集存储等功能;为了有效行进与越障,要求机器人能提供较大的驱动电流;为了躲避无法逾越的障碍,要求机器人能够具备CMOS图像模式识别与红外测距功能,以进行有效避障。
探测机器人电气系统包括供电、核心控制、通信、驱动、测量传感等子系统,结构如图3所示。
2.1 核心控制系统
核心控制系统运行主算法程序,负责多传感器信息融合[5]、远程通信、图像采集与处理、机械臂及行走机构控制等。
CPU采用基于ARM7架构的32位处理芯片LPC2138,其带有512 kB的高速Flash存储器、47个GPIO、2个10位8路ADC、10位DAC、PWM通道和多个32位定时器,以及9个边沿或电平触发的外部中断。该芯片还具有实时仿真和嵌入式跟踪功能,宽范围的串行通信接口和片内32 kB的SRAM,非常适用于通信网关、协议转换等。
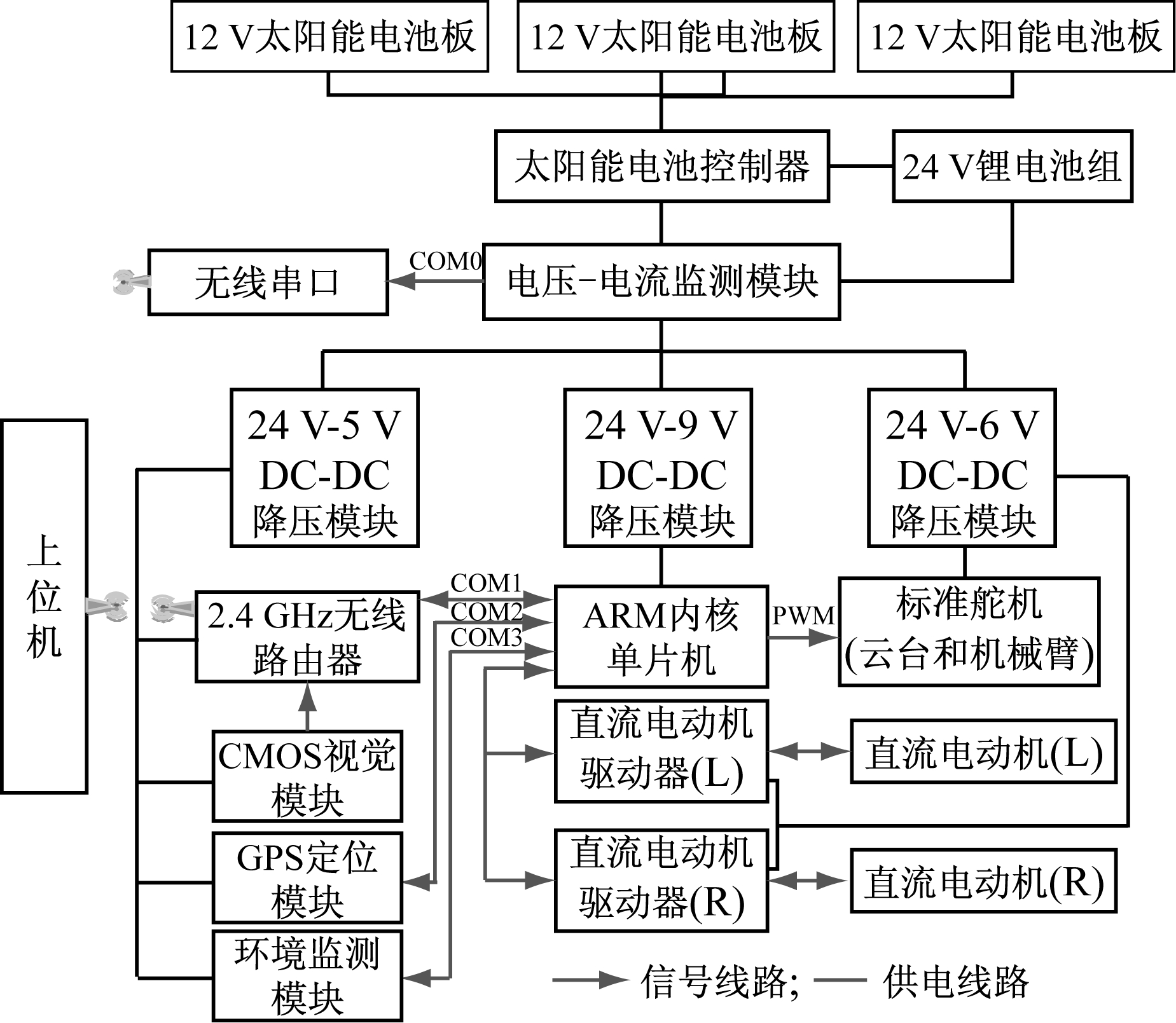
图3 探测机器人电气系统结构
2.2 驱动系统
探测机器人采用六轮独立闭环方式驱动,使用Faulhaber带编码器的空心杯减速直流电动机2342L012(额定电压为12 V,输出功率为17 W,输出扭矩大,减速比为64∶1),并设计了双直流电动机闭环驱动集成电路板,其核心处理器及外围电路可以采集光电编码器反馈信息,并进行PID运算、PID参数优化,可更准确地调整电动机转动角度和转速。
2.3 测量传感系统
探测机器人配有8个GP2D12红外测距传感器,同水平面均匀分布。该传感器具有红外信号发射端和接收端,发射端发射出红外光线,光束传播过程中遇到物体后被反射,回到传感器接收端,利用发射与接收的时间差计算得到与物体的距离。其功耗小,体积小,抗干扰能力强,测量射程范围为10~80 cm,可用于实现近距离物体的测距避障功能。
探测机器人配备了2个CMOS视觉模块,搭配机械云台进行全方位图像采集与模式识别。双目视觉技术模仿人双目立体感知的方法[6],用2部视觉传感器同时采集同一场景的图像,利用计算机进行图像阈值化、图像增强处理,以及连通域提取等流程,实现彩色图像中的多个障碍物识别[1],然后根据场景在不同摄像机成像中存在的视差,得到空间物体的深度信息,从而重建出场景的三维信息。
探测机器人还装配了全球定位系统,用于采集纬度和经度,同时也能室外定位。陀螺仪用于室内位姿调整,BH1750FVI芯片的光照度传感器、单总线DS18B20数字温度传感器、DHT11湿度传感器等用于机器人周围环境数据实时监测及存储,最后,通过无线通信系统将传感器信息上传到上位机。
2.4 通信系统
探测机器人一方面可以根据自身硬件进行自主决策,实现一定程度的自主导航、定位与控制;另一方面,还可以接收上位机的远程操作控制指令[7]。
通信系统是实现机器人信息流传递的关键,机器人采用无线通信技术与上位机进行实时双向通信,上位机发送控制信息,同时接收机器人各模块数据与图像信息。通信系统具体实现:在2.4 GHz无线路由器中写入OpenWrt系统,并在该系统上运行Serial2net程序,进行核心处理器串口与网口的信息交换。
3.1 光伏发电系统组成
光伏发电是利用由半导体材料制成的PN结电池结构所产生的光生伏特效应[3]。太阳能电池是为了满足各种供电系统所需,直接把光能转换成电能,并通过串联和封装保护后形成的大面积太阳能电池板。
探测机器人配有3块可折叠式薄膜太阳能电池板,其光电转换效率高,聚光条件下也适用。配合使用具有功率控制功能的MPPT(Maximum Power Point Tracking,最大功率点跟踪)控制器和储能锂电池组,便组成了整个光伏发电系统,如图4所示,该系统不受地域制约,安全、环保,且性能可靠。
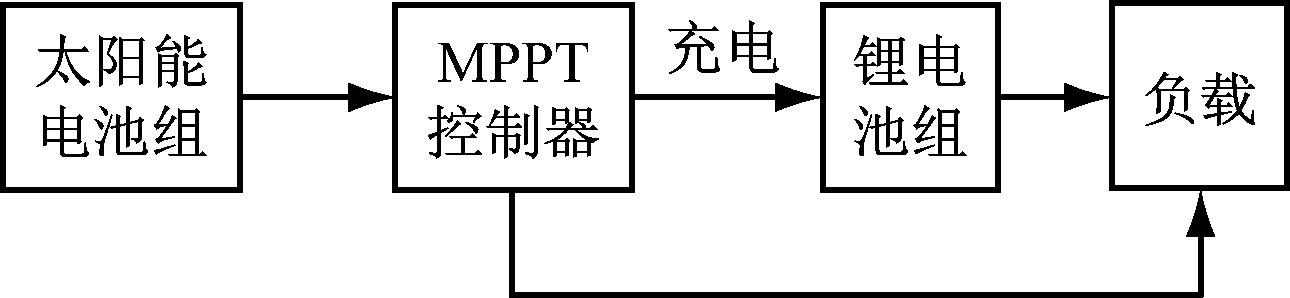
图4 探测机器人光伏发电系统
根据光伏发电系统实际工作状态,设计了3种工作模式:光照充足时,完全由光伏电池给负载供电,锂电池只有储能作用,锂电池充满时,应断开充电线路,防止锂电池过充;光照不足时,由光伏电池和锂电池同时给负载提供电能;无光条件下,由锂电池单独供电,此时太阳能电池续航能力较弱。
3.2 最大功率点跟踪算法
光伏方阵的最优工作点称为最大功率点,其值主要取决于电池板的工作温度和当时的光照水平[4]。最大功率点跟踪算法是指太阳能电池的最大功率点追踪方法,在快速变化的天气条件下,控制电池板尽量在最大功率点工作。MPPT控制器能够实现电路中电压、电流的监测,以及锂电池的充、放电控制,不仅可防止锂电池过充,延长锂电池的寿命,还可根据负载需求,实现太阳能电池组件的主动控制及锂电池的电能输出。锂电池充电时,太阳能电池的输出电压应大于锂电池当前电压,否则无法充电。
MPPT算法依据改进的爬山法,为了实现最大功率点追踪,通过比较相邻2次的光伏方阵输出功率来决定是增大还是减小工作时的电压。改进爬山法跟踪原理如图5所示。在光照条件为S1不变的情况下,Δp为当前时刻输出功率ω2与上一时刻输出功率ω1的差值,Δp=ω2-ω1。在光照条件改变的情况下,S1,S2分别为上一时刻和当前时刻的光照条件;ω1为上一时刻工作电压为V1时的输出功率值![]() 为当前时刻工作电压为V2时的输出功率值;ω3为下一时刻工作电压为V3时的输出功率值,V3=V1;Δp′为当前时刻输出功率与上一时刻输出功率的差值,
为当前时刻工作电压为V2时的输出功率值;ω3为下一时刻工作电压为V3时的输出功率值,V3=V1;Δp′为当前时刻输出功率与上一时刻输出功率的差值,![]() -ω1。图中,如果Δp>0,电池板在功率上升段工作,这时有必要持续加强工作时的电压,使实际工作功率从左侧逐渐接近最大功率点位置;如果Δp<0,电池板在功率下降段工作,此时有必要降低工作时的电压,使功率从右侧逐渐接近最大功率点位置;如果Δp=0,则电池板在最大功率点旁边工作,需使工作电压在光照强度改变之前保持稳定。
-ω1。图中,如果Δp>0,电池板在功率上升段工作,这时有必要持续加强工作时的电压,使实际工作功率从左侧逐渐接近最大功率点位置;如果Δp<0,电池板在功率下降段工作,此时有必要降低工作时的电压,使功率从右侧逐渐接近最大功率点位置;如果Δp=0,则电池板在最大功率点旁边工作,需使工作电压在光照强度改变之前保持稳定。
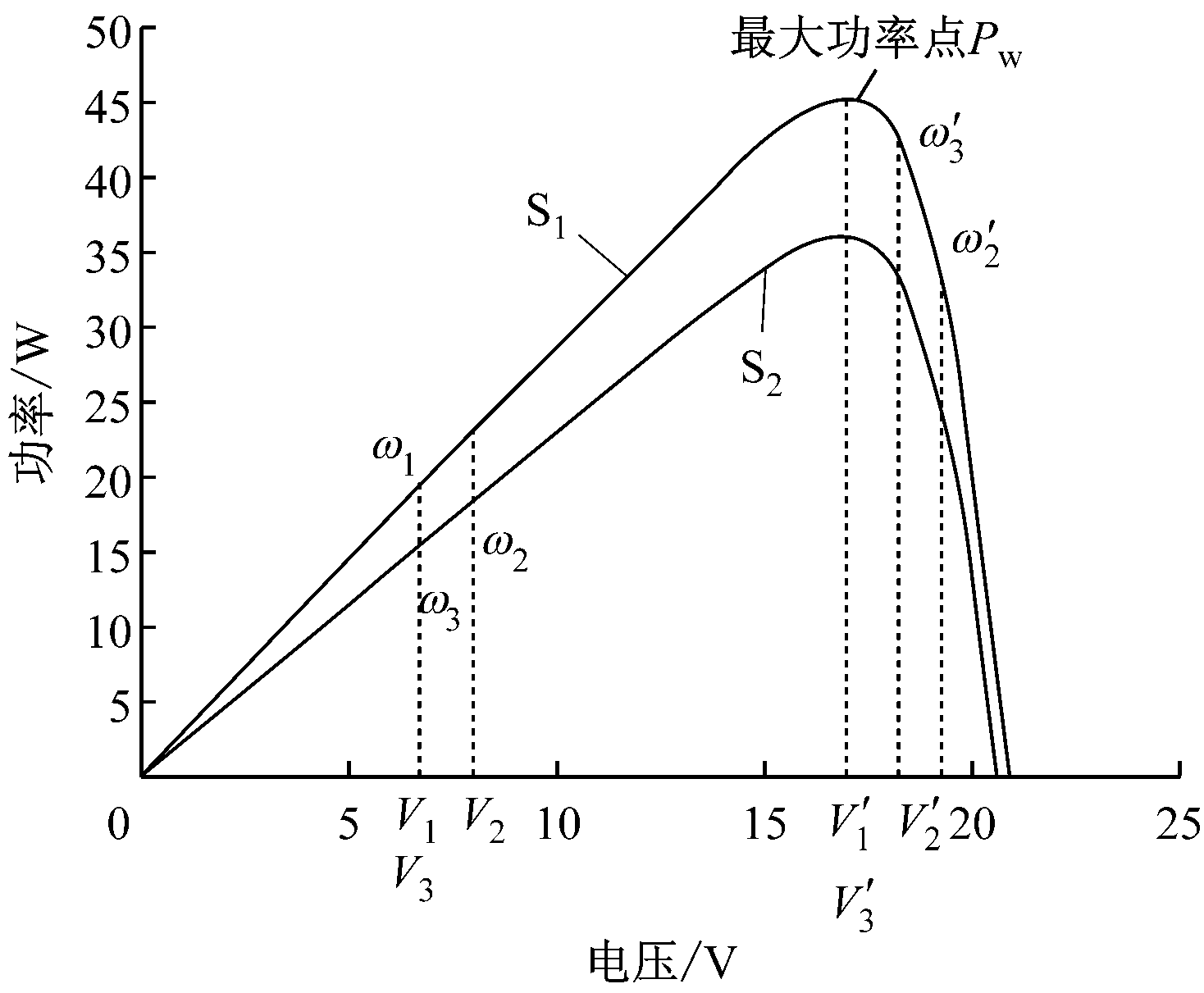
图5 改进爬山法跟踪原理
为了避免误动作,加入对ω3的判断作为辅助决策条件。当Δp′>0时,假设ω2<ω3,则证明功率变化是由光强影响的,应该继续维持一开始工作状态时的电压值不变,否则,证明电池板在最大功率点的左侧工作,需增加工作时的电压;同理,当Δp′<0时,假设ω2>ω3,则应继续保持原来的工作电压不变,否则,有必要降低工作时的电压。改进爬山法有效减少了爬山法跟踪的误动作,并能更好地跟踪光照强度的快速变化,提高最大功率跟踪效率,使跟踪匹配因数更接近于1。跟踪匹配因数越接近1,说明MPPT控制算法效果越好[4]。改进爬山法流程如图6所示。
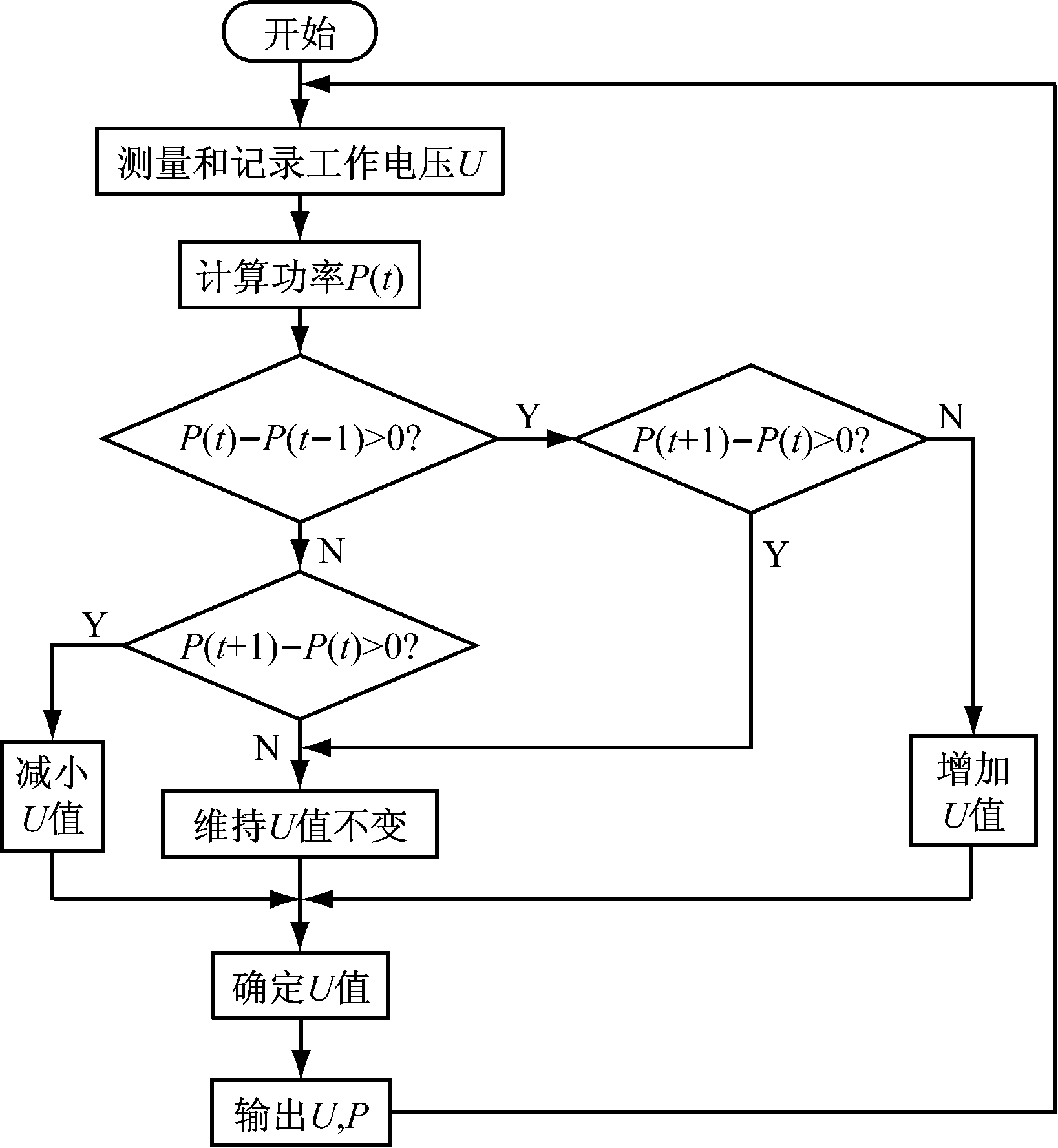
图6 改进爬山法流程
探测机器人电气系统以ARM7架构处理器为核心,并运用GPS、红外传感器、陀螺仪、视觉传感器、环境探测传感器等进行多传感器信息融合,进而控制行走机构与机械臂等执行机构;选用改进的爬山法进行最大功率点追踪,有效降低了爬山法跟踪的误动作,能更好地跟踪光强的迅速变化,提升最大功率跟踪的效率,解决了探测机器人的能耗问题。
参考文献:
[1] 郑海华.基于视觉的平地探测机器人避障研究[D].长沙:中南大学,2014.
[2] 赵建伟,高培源,陈占营,等. 六轮月球探测机器人质心域分析及摇臂优化[J].兵工自动化,2015,34(5):66-69.
[3] 刘旺.太阳能车电气系统及功率平衡控制[D].长沙:中南大学,2013:11-15.
[4] 崔岩,蔡炳煌,李大勇,等.太阳能光伏系统MPPT控制算法的对比研究[J].太阳能学报,2006,27(6):535-539.
[5] 付志超.基于信息融合技术的煤矿井下探测机器人检测系统研究[D].太原: 太原理工大学,2010.
[6] 邱河波.基于DSP的移动机器人双目视觉技术研究[D].成都:电子科技大学,2013:14-15.
[7] 王巍,梁斌,强文义.月球探测机器人及其关键技术浅析[J].哈尔滨工业大学学报,2001,33(3):321-325.
ZHAI Guodong, SU Yixin, GAO Peiyuan
(School of Mechanical Electronic and Information Engineering,China University of Mining and Technology (Beijing), Beijing 100083, China)
Abstract:In order to improve intelligence of exploration robot, an electrical system taking ARM architecture as core was designed. The system adopts techniques including 2.4 GHz wireless communication, closed-loop control of motors, control of multi degree of freedom mechanical arm and multi sensor information fusion to achieve functions of obstacle avoidance, obstacle crossing, positioning, communication and sensor measurement. It uses photovoltaic effect and improved hill climbing method to realize maximum power point tracking, and solves energy consumption problem of exploration robot.
Key words:exploration robot; electrical system; photovoltaic power generation; MPPT
文章编号:1671-251X(2016)07-0079-04
DOI:10.13272/j.issn.1671-251x.2016.07.020
收稿日期:2016-01-25;修回日期:2016-05-16;责任编辑:胡娴。
基金项目:中央高校基本科研业务费专项资金资助项目(2014YJ02)。
作者简介:翟国栋(1973-),男,河北高碑店人,高级工程师,博士,主要从事机电专业的教学、科研工作,E-mail:zgd@cumtb.edu.cn。
中图分类号:TD67
文献标志码:A 网络出版时间:2016-07-05 15:05
翟国栋,苏一新,高培源.探测机器人电气系统设计[J].工矿自动化,2016,42(7):79-82.