图1 四象限变流器驱动控制系统组成
邓永红, 曹浩堃, 张全柱
(华北科技学院 信息与控制技术研究所, 河北 三河 065201)
摘要:针对采煤机四象限变流器指标要求,设计了一种新型的采煤机四象限变流器驱动控制系统,详细介绍了系统硬件电路设计及软件实现。现场调试结果表明,该系统实现了采煤机的快速制动,可为采煤机提供持续的制动力,提高了采煤机牵引运行的控制性能和可靠性,具有较好的工程应用推广价值。
关键词:采煤机; 四象限变流器; 同步PI解耦电流控制; 牵引变频器
网络出版地址:http://www.cnki.net/kcms/detail/32.1627.TP.20160705.1457.006.html
采煤机是煤矿企业的重要生产设备,其安全稳定运行是煤矿生产的重要保障,采煤机在刮板输送机上往复行走进行采煤工作,主要依靠牵引变频器作为驱动力,一般采用1台或2台通用型(整流单元为不控整流桥二极管)牵引变频器 [1] 来驱动。对于这类依靠牵引变频器来驱动的采煤机具有如下的缺点:① 2台牵引电动机运行不同步、负荷不平衡。② 对于有较大倾角的采煤工作面,向下运行时需要足够大的制动力,同时采煤机工作过程中经常性出现急停产生的制动能量,往往需要采用外加制动单元的方案来解决,造成能耗大,故障率高,防爆性差,且占用采煤机电控箱内有限的空间[2]。③ 采煤机供电电压往往波动较大,严重时高达-30%~35%,造成二极管整流桥的牵引变频器中间直流电压波动较大,严重影响采煤机的正常运行。④ 采煤机牵引变频器在运行过程中产生的谐波会危害整个采煤机的安全运行,造成电网功率因数低[3-4]。⑤ 采煤机电控箱内密闭的环境要求牵引变频器具有很好的散热性;采煤机工作时会产生强烈的振动和冲击,要求牵引变频器有很好的抗振能力[5]。要解决上述问题,就要将采煤机牵引变频器改换成四象限变流器,研究其驱动控制系统,通过适当的脉冲控制方法实现其能量的双向流动,使制动能量回馈电网,改善输入电流波形,提高功率因数,消除谐波污染,实现节能环保,稳定中间直流电压,提高采煤机牵引的控制性能、安全性,降低故障率。为此,根据采煤机运行特点和应用要求,兼顾技术先进性和工程实用性,笔者设计了全数字化智能控制的高性能采煤机牵引四象限变流器驱动控制系统。
1.1 系统组成
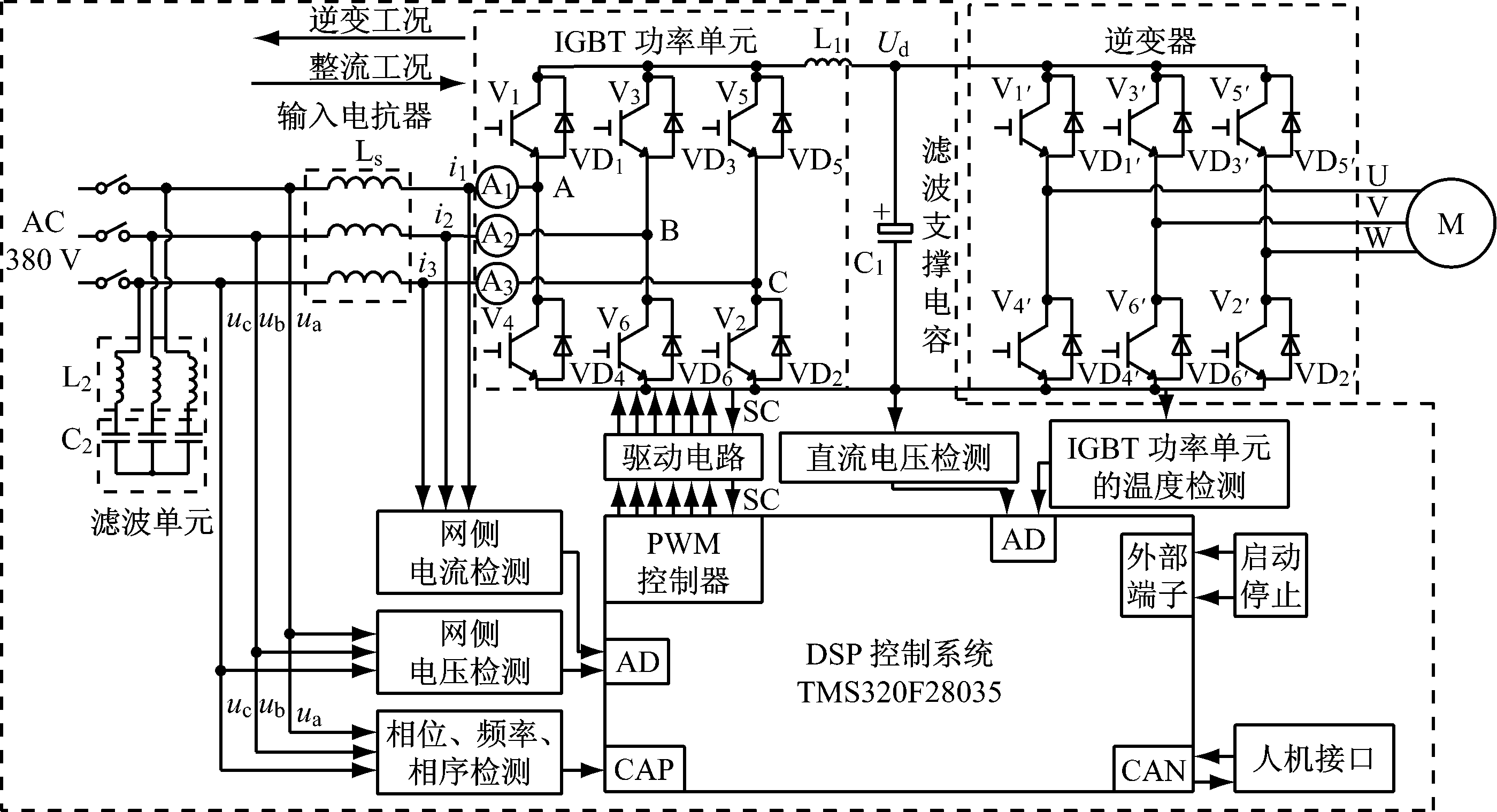
采煤机牵引四象限变流器驱动控制系统由滤波单元、输入电抗器、IGBT功率单元、滤波支撑电容、DSP控制系统、驱动电路、各种信号检测电路及人机接口组成,如图1所示,三相交流输入电源通过四象限变流器在整流工况运行时,输出稳定的直流电压,并提供给逆变器,带动采煤机向左或者向右运行;当采煤机瞬间停车或者下坡运行时,四象限变流器通过逆变工况运行将制动能量回馈电网。
图1 四象限变流器驱动控制系统组成
1.2 DSP控制系统
DSP控制系统如图2所示,系统核心芯片采用TMS320F28035定点DSP,利用TMS320F28035丰富的外围接口、12位高精度片内AD,完成四象限变流器驱动控制系统各种检测信号采样、PWM脉冲及保护状态信号输入。DSP控制系统是整个四象限变流器驱动控制系统的核心部分,其主要由DSP数字系统、模拟量输入电路、IGBT驱动电路、人机接口电路及电网电压相位/频率/相序检测[6]、缺相保护电路等部分组成。DSP数字系统由TMS320F28035、外部端子数字量输入信号等组成,它能完成各种数字计算,外部端子控制,四象限变流器的启停控制、运行等功能。模拟量输入电路主要由网侧电压、电流和直流电压检测与调理电路,IGBT温度检测与调理电路等组成。电压、电流检测电路主要是将强电信号转换为弱电信号,供DSP进行数字采样。IGBT驱动电路将DSP系统发出的SVPWM信号转换为可驱动IGBT的脉冲信号,同时当IGBT发生短路或过流故障时,向DSP控制系统反馈故障信号。人机接口电路主要由CAN通信电路、上位PC机显示电路及操作键盘组成,可以通过键盘设定各种给定指令和参数,如实现四象限变流器的启动与停止,给定中间直流电压值等;可以显示四象限变流器的各种状态,并记录四象限变流器的历史运行故障。
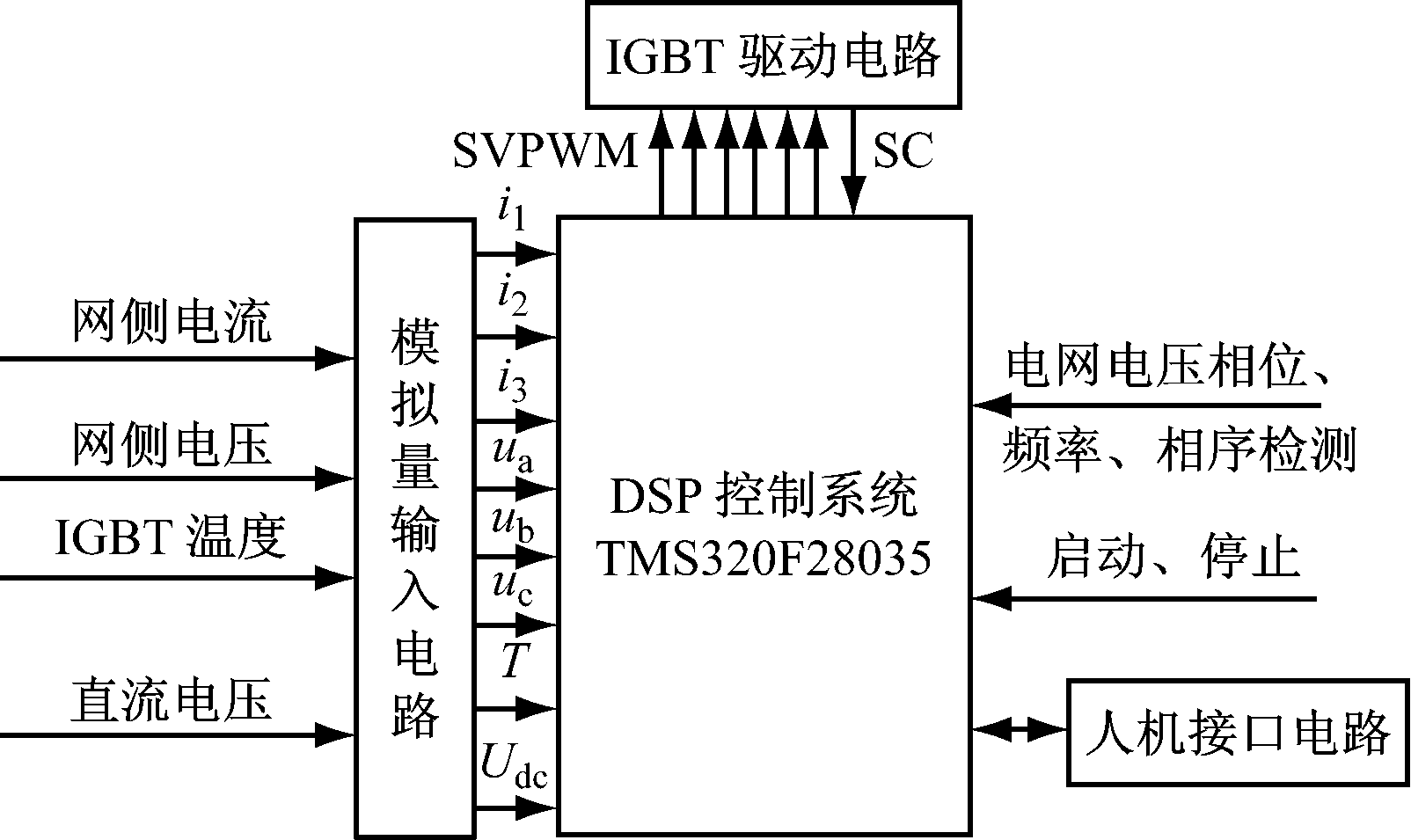
图2 DSP控制系统
1.3 硬件电路
1.3.1 网侧电流检测电路
网侧电流的检测对四象限变流器驱动控制系统十分重要,其值将作为同步PI解耦电流控制时的指令电流,检测的可靠性与精度是首要考虑的指标。按典型功率45 kW考虑,在三相平衡系统中,线电压为380 V,每相最大电流不超过100 A,考虑到一些裕量,选用TBC100EH3型三相交流电流传感器来检测网侧电流。TBC100EH3型三相交流电流传感器初次级绝缘分辨率为1 000∶1,测量范围为300 A,可用于测量直流、交流和脉冲电流,其额定输出电流有效值为20 mA,电源电压为±15 V。
网侧电流检测电路如图3所示,电源的三相线分别从传感器的3个测量孔中穿过,传感器的M1、M2、M3分别为三相的测量电流输出。由于是三相平衡系统,三相电流调理电路一致,图中给出了其中一相电流调理电路。各相电流检测值输出经过磁珠(抑制高频干扰与尖峰)后流过采样电阻,使电流信号变为电压信号,然后经过TL082运放调理,使输出电压在0~3.3 V,最后经过DAN217箝位保护后输入DSP的AD口。
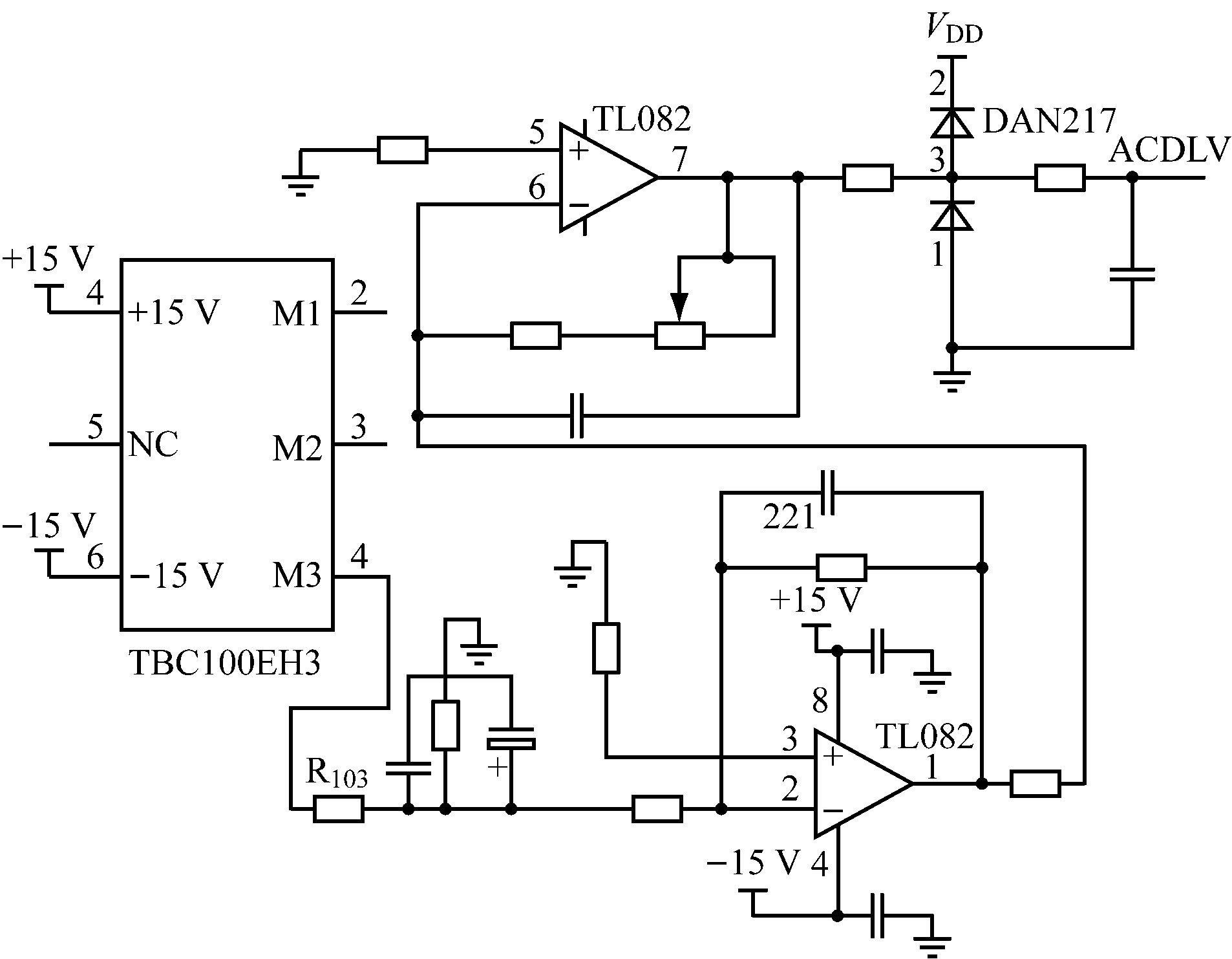
图3 网侧电流检测电路
1.3.2 网侧电压和直流电压检测电路
网侧电压值也作为同步PI解耦电流控制的指令,实现解耦算法。检测的网侧电压,其线电压额定值为380 V,故选择电压传感器的型号为TBV10/25 A,该型号传感器初级与次级绝缘,可用于测量直流、交流和脉冲电压,额定输入电流为10 mA,输出电流为25 mA,电源电压为±15 V。网侧电压三相检测电路是一致的。网侧电压两线电压的检测电路如图4所示。两线电压经过传感器输入侧限流电阻R5接入,经过采样电阻R8后变为电压信号,然后经电容滤波后由TL082运放调理运算后输入DSP的AD口。
直流电压的值作为同步PI解耦电流控制的外环控制反馈指令,使四象限变流器输出稳定的直流电压,直流电压检测电路与网侧电压检测电路相同,只是输入限流电阻R5和采样电阻R8的值不同。
1.3.3 电网电压相位、相序、频率检测电路
电网电压频率、相位、相序的值作为同步PI解耦电流控制中SVPWM算法运算的参数,使四象限变流器回馈电网时能准确并网,检测电路如图5(a)所示。输入交流三相电压经过隔离变压器变换为5 V,其频率、相位与电网一致,然后经电容滤除高频谐波,输入到由TL082运放构成的过零比较器,左侧2个反并联二极管为输入级保护,经过过零比较器后,变为同频率同相位的方波(图5(b))。方波信号经过滤波稳压管稳压后,送入74LS14(六路施密特触发反相器),进行2次反相的信号为SX1、SX2、SX3,对SX1、SX2、SX3进行整形,最后经过箝位保护后送入DSP的捕获口。
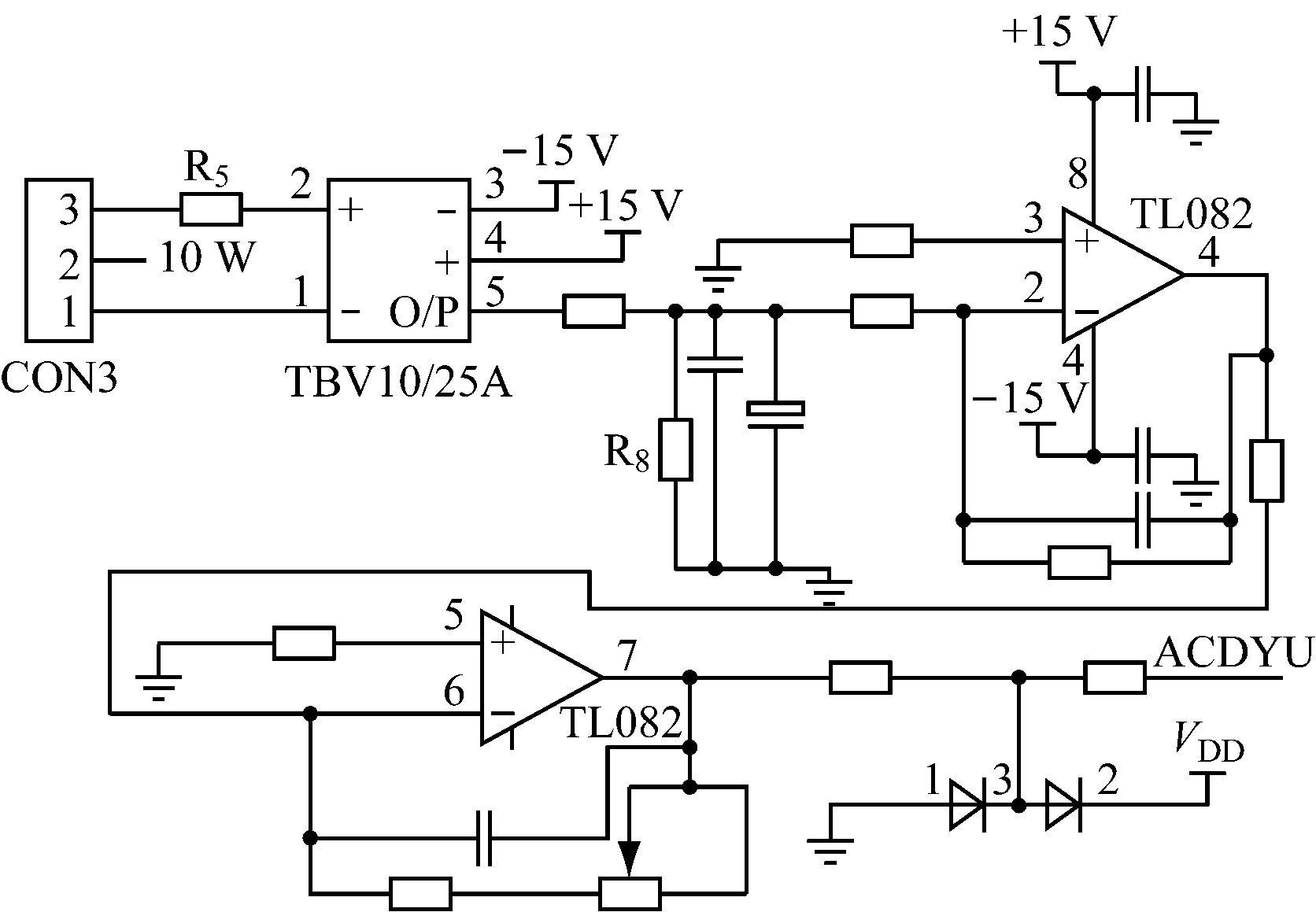
图4 网侧电压和直流电压检测电路
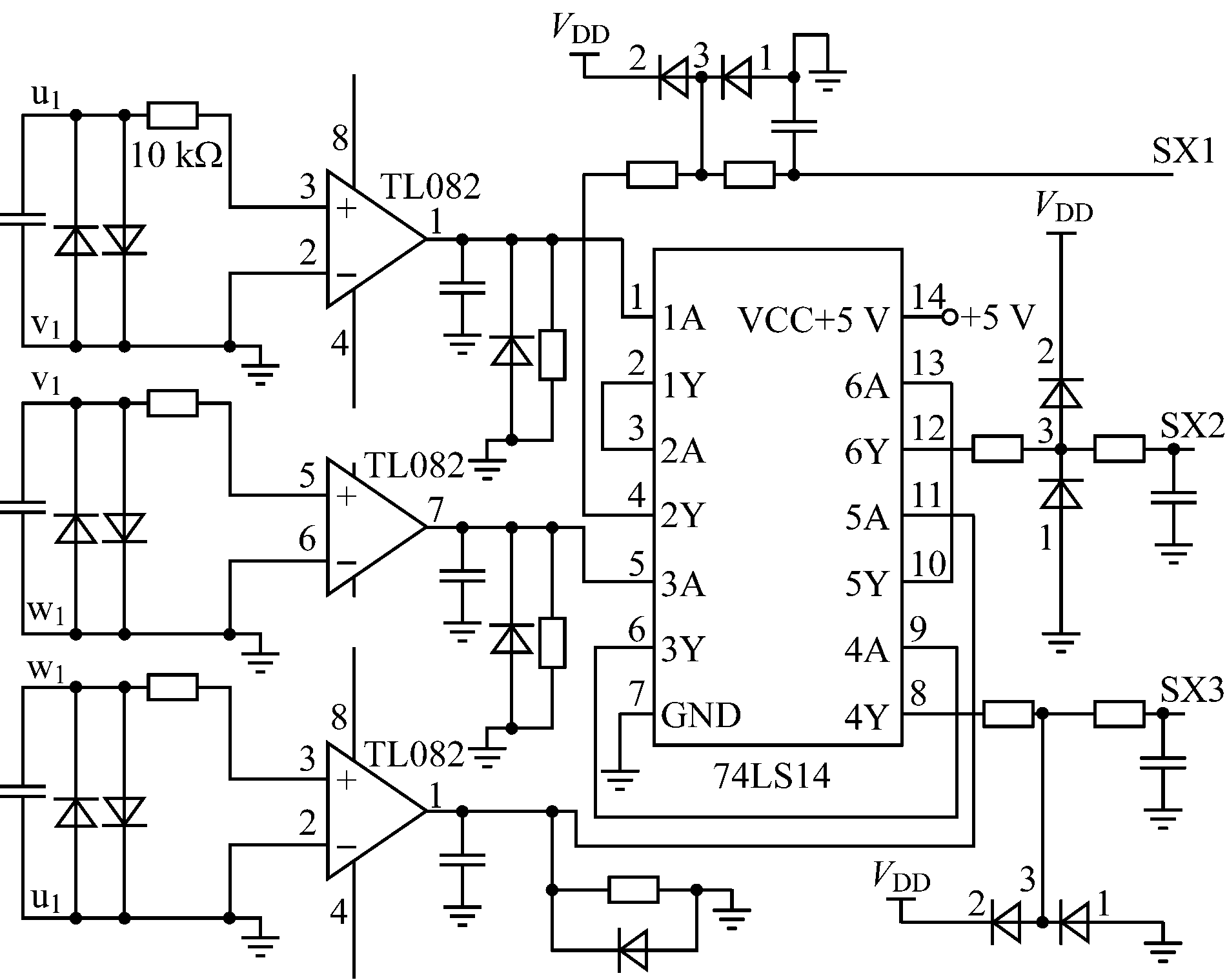
(a) 网侧电压相位、相序、频率检测电路
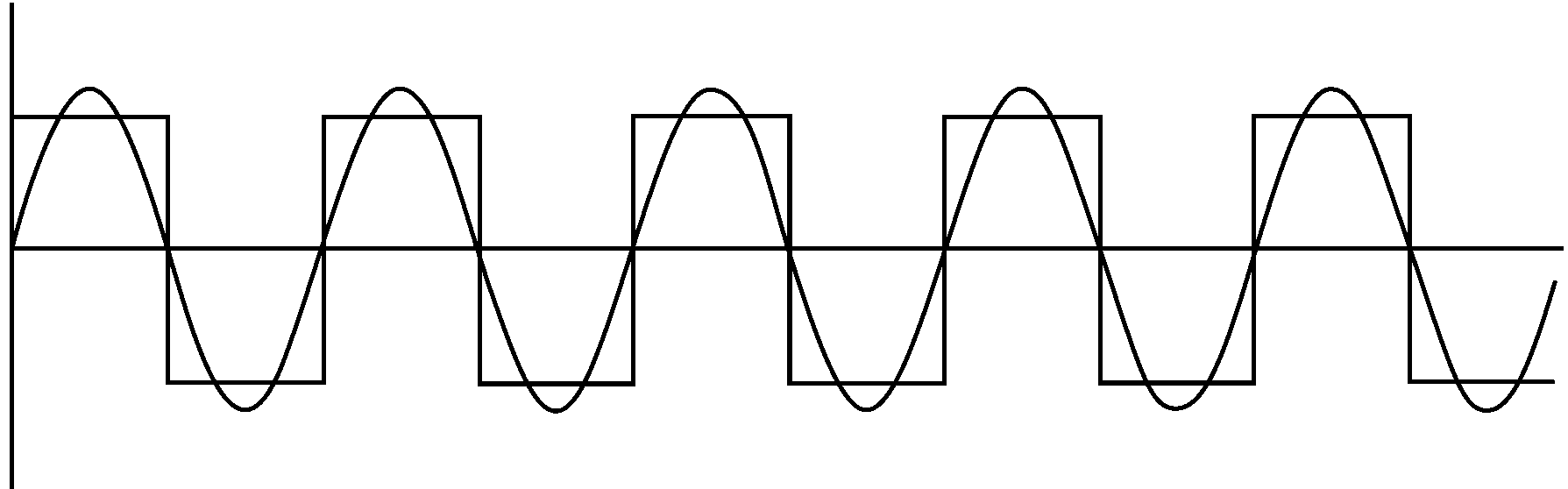
(b) 方波波形
图5 电网电压相位、相序、频率检测电路及方波波形
由于DSP自带高精度捕获口,且具有相位计数模式,依据输入的3路方波信号,可很方便计算出电网电压的频率、相位,用于判断正、逆相序及进行缺相检测。
1.3.4 IGBT温度检测电路
四象限变流器驱动控制系统安装在采煤机密闭的电控箱里面,本身是自然冷却,依靠安装在采煤机水冷系统外壁上来加强散热效果,但工作时温度会急剧升高,即使由采煤机外壳加强散热,长期使用,冷却效果仍不理想,会使系统温度过高,从而损坏驱动控制系统,所以,须对IGBT温度进行检测。IGBT温度检测采用PT100温度传感器来完成,检测电路如图6所示,PT100与系统散热器表面充分接触,当四象限变流器驱动控制系统温度发生变化时,PT100的阻值也随之变化,利用检测电路可以测得阻值的变化,从而测得驱动控制系统的温度。图6中TL431构成稳压电路,提供精准+5 V电压,运算放大器TL082和电阻组成一个200 mA的恒流源电路,利用恒流源将PT100的阻值转换为电压信号,再利用AD620调理信号后,将信号送入DSP的AD口进行转换。整个温度检测电路将实时反馈四象限变流器IGBT的温度情况,利用DSP可实现实时监测与温度保护。
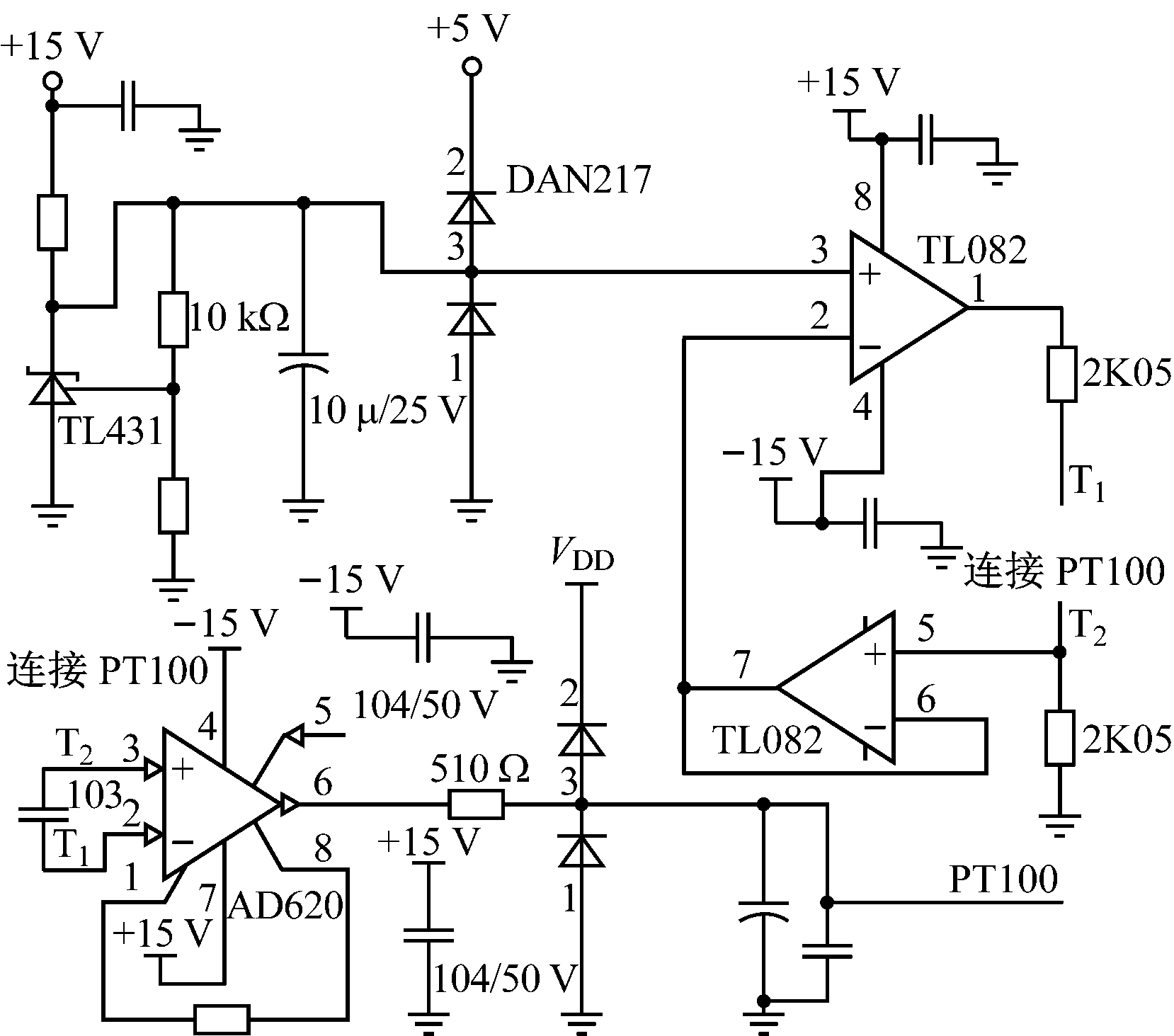
图6 IGBT温度检测电路
1.3.5 IGBT驱动电路
针对45 kW的四象限变流器驱动控制系统,驱动电路的IGBT型号为FF300R12ME4,这是第4代IGBT,该IGBT的电感低,开关损耗低,进一步优化了软开关特性,其封装两端接线结构简化了主回路电气连接。IGBT驱动电路如图7所示,选择配套的驱动板2SP0115T,直接焊接到IGBT上,只需设计外围电路,便可使用,采用光纤直接与DSP控制系统连接,使得系统更加稳定可靠。
四象限变流器驱动控制系统同步PI解耦电流控制算法[5-6]如图8所示,取q轴电流![]() 为0,直流电压为外环控制,计算出同步旋转坐标系下交流电流d轴的指令值
为0,直流电压为外环控制,计算出同步旋转坐标系下交流电流d轴的指令值![]() ,通过id的控制实现直流电压无静差控制。检测网侧三相电压和三相电流,经坐标变换计算出该电流的d、q轴分量id、iq,计算出该电压的d、q轴分量ed、eq及相位,通过2个单独的PI控制器,计算出对应电感上的电流变化,实现解耦。通过内环电流环控制实现四象限变流器交流侧电流波形和相位的直接控制,用于快速跟踪参考电流值,实现电压、电流、相位的控制。最后计算四象限变流器交流输入侧IGBT桥臂中点电压的d、q轴分量vd、vq,通过坐标变换,再经过空间矢量脉宽调制(SVPWM)[6-9]算法得到控制开关管的触发脉冲。
,通过id的控制实现直流电压无静差控制。检测网侧三相电压和三相电流,经坐标变换计算出该电流的d、q轴分量id、iq,计算出该电压的d、q轴分量ed、eq及相位,通过2个单独的PI控制器,计算出对应电感上的电流变化,实现解耦。通过内环电流环控制实现四象限变流器交流侧电流波形和相位的直接控制,用于快速跟踪参考电流值,实现电压、电流、相位的控制。最后计算四象限变流器交流输入侧IGBT桥臂中点电压的d、q轴分量vd、vq,通过坐标变换,再经过空间矢量脉宽调制(SVPWM)[6-9]算法得到控制开关管的触发脉冲。
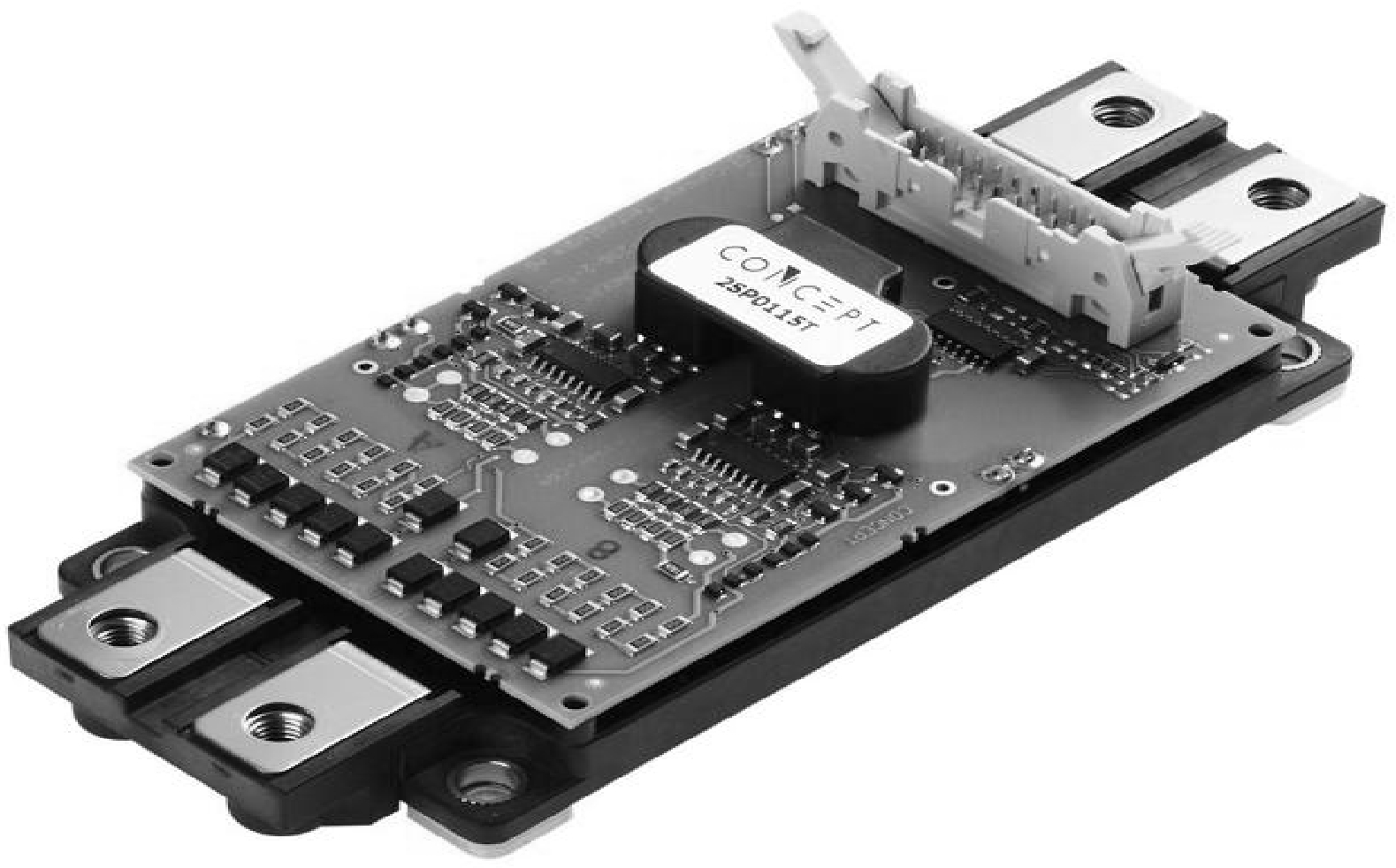
图7 IGBT驱动电路
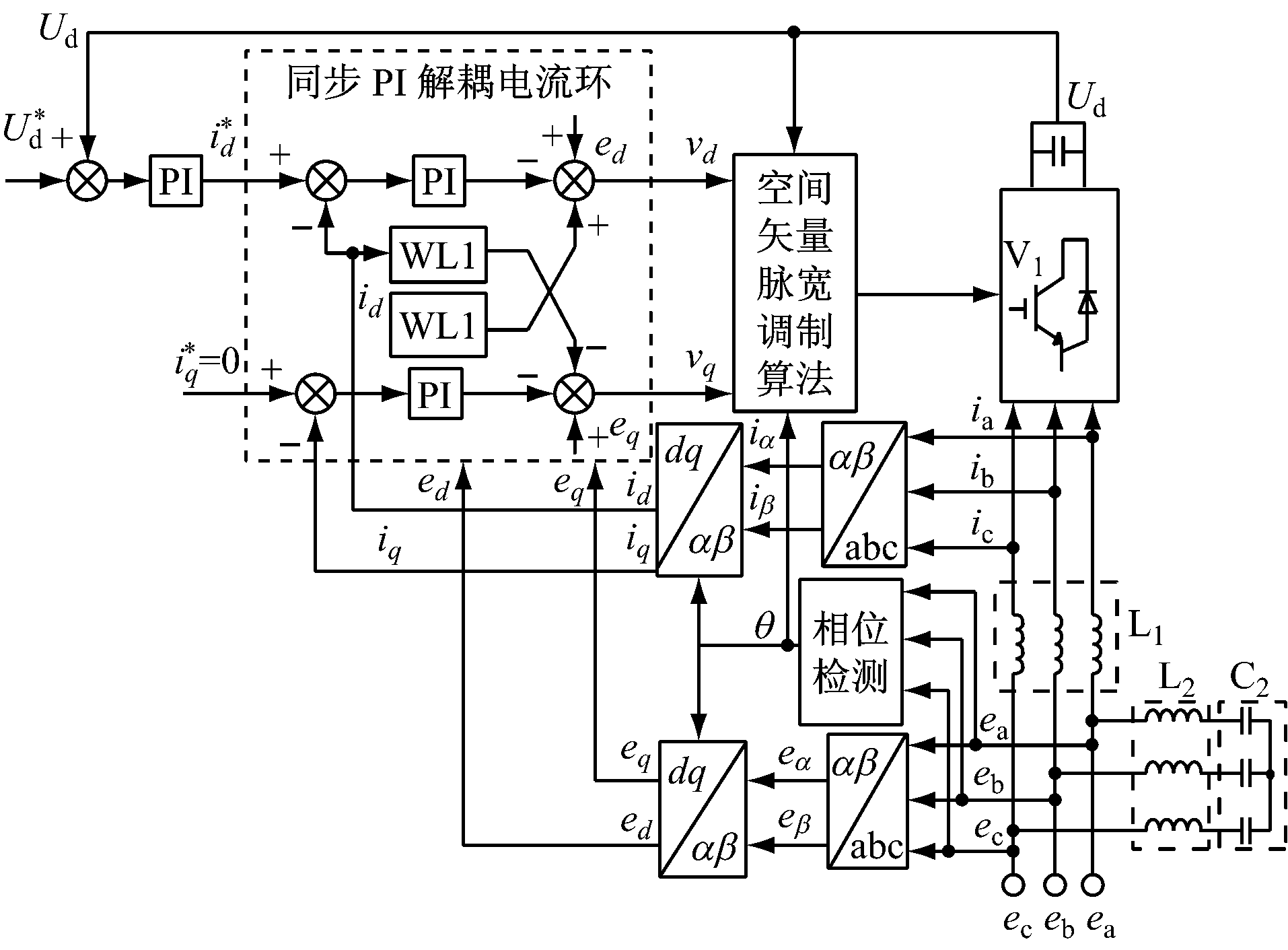
图8 四象限变流器驱动控制系统同步PI解耦电流控制算法
四象限变流器驱动控制系统程序主要由主程序、AD定时器中断服务程序、捕获中断服务程序、CAN通信中断程序、波形发生器中断服务程序等组成。系统主要程序流程如图9所示。
主程序主要完成初始化变量和数据设置、特殊功能寄存器和外部事件管理寄存器的初始化设置、各种中断设置、开中断等功能,以及完成外部端子的信号采样,管理四象限变流器的启停、CPU的复位信号,输出故障信号等。
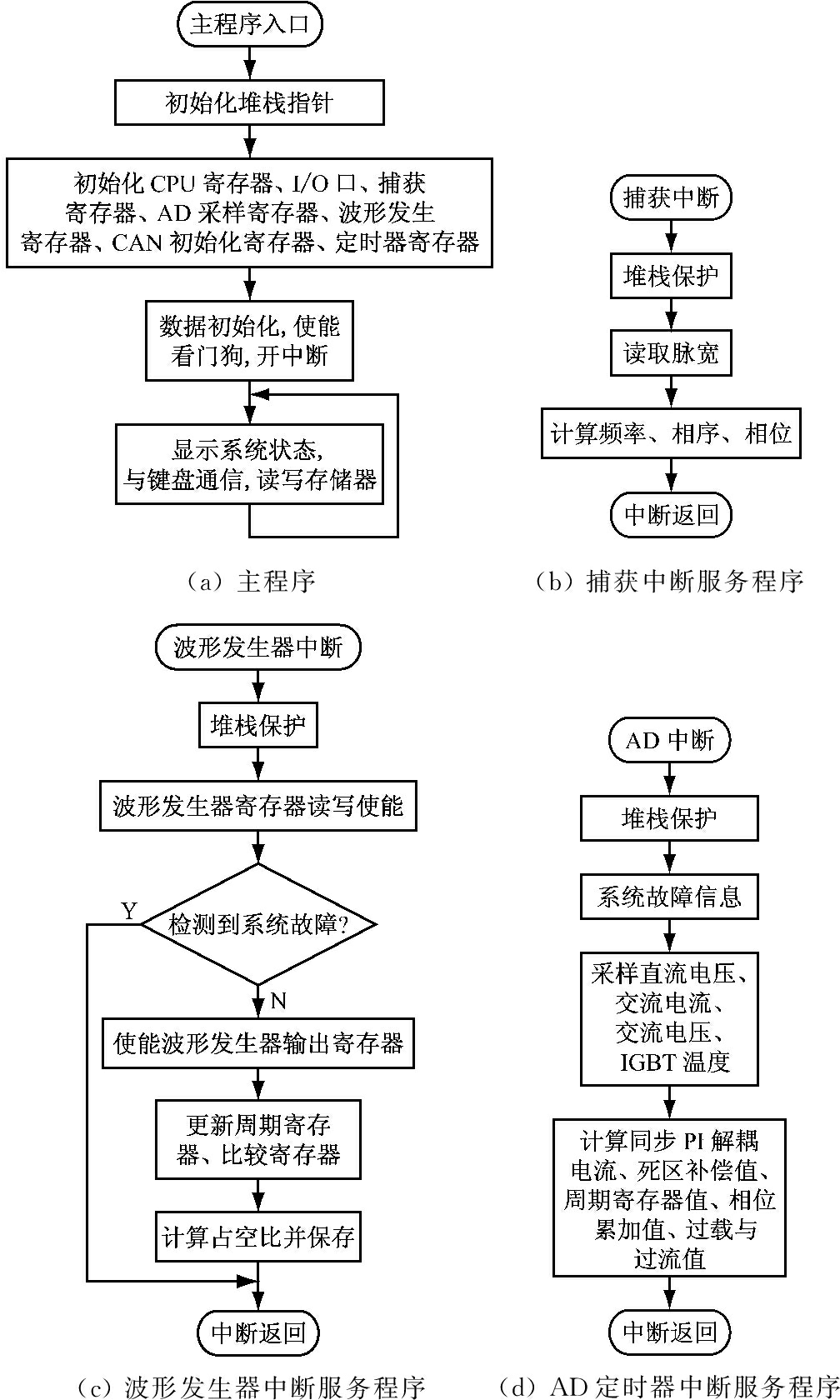
图9 系统主要程序流程
CAN通信中断程序主要完成与操作键盘的通信,将四象限变流器驱动控制系统的运行状态、故障信息发给键盘显示,同时接收键盘的设置命令。捕获中断服务程序主要完成电网相位、相序和频率的采样计算。波形发生器中断服务程序主要完成周期寄存器和占空比的更新、占空比的计算及SVPWM波的生成输出。AD定时器中断服务程序主要完成以下工作:① 三相交流电流与电压、直流电压、IGBT温度采样的计算。② 完成死区补偿、波形发生器周期寄存器值的计算,相位累加值及过载、过流值的计算等。③ 完成同步PI解耦电流控制算法的计算。
为了验证四象限变流器驱动控制系统的可靠性,对其进行了实验研究,系统主要参数:额定功率为45 kW,输入三相交流电压为AC380 V,调制频率为5 kHz。四象限变流器额定功率整流工作时,网侧相电压、相电流和整流输出直流电压波形如图10(a)所示,从图10(a)可以看出,直流电压稳定在DC672 V,输入相电压和相电流同相位,功率因数接近1,网侧电流波形变得明显正弦化,谐波含量大大减小。四象限变流器逆变回馈电网时,网侧相电流、相电压及中间直流电压波形如图10(b)所示,从图10(b)可以看出,直流电压稳定在DC672 V,输入相电压和输出相电流相位反向,功率因数接近-1,电流波形也明显成正弦波。可见四象限变流器整流工况和逆变工况工作稳定,谐波含量低。
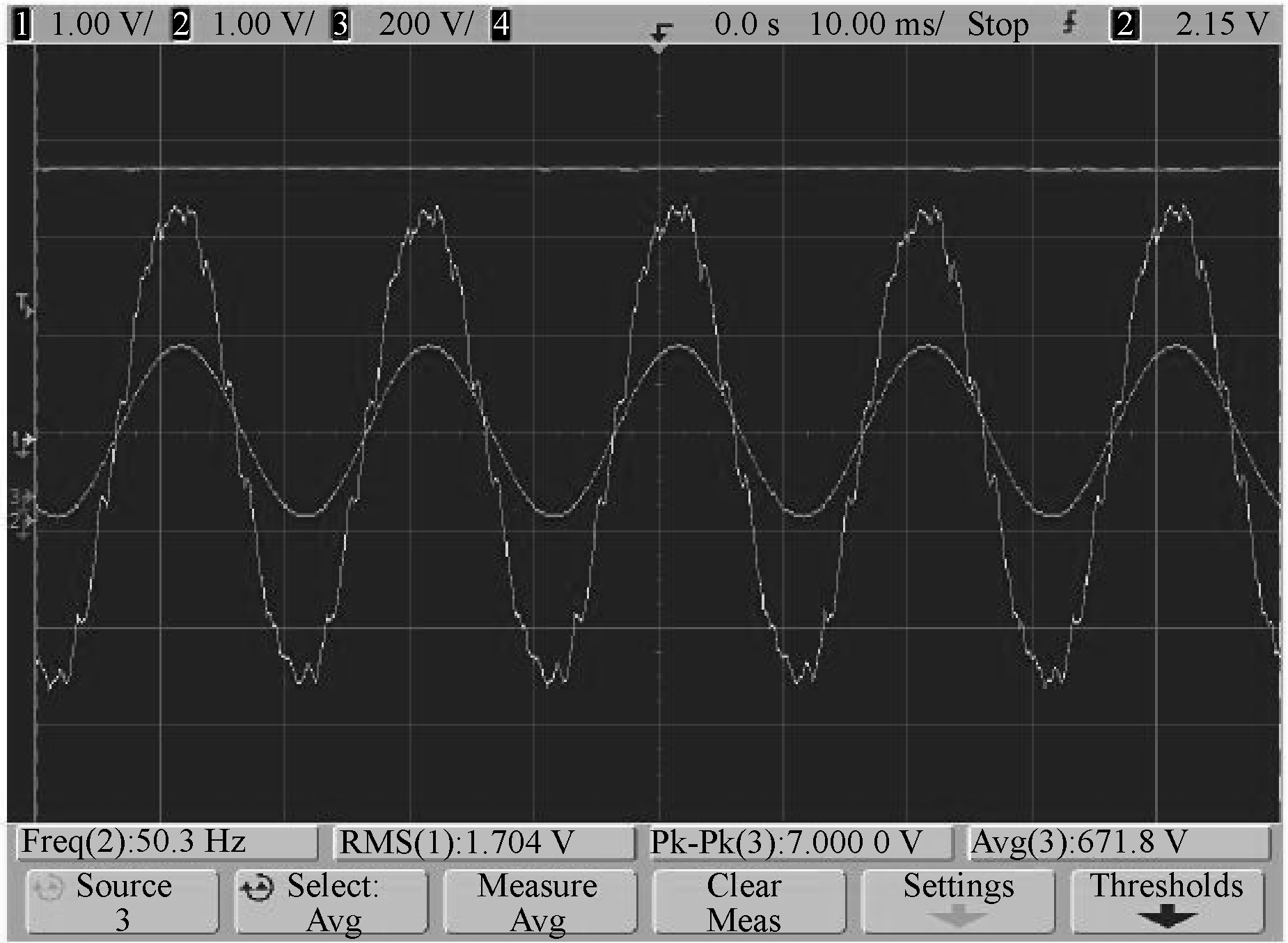
(a) 整流工况时的相电压、相电流和直流电压波形
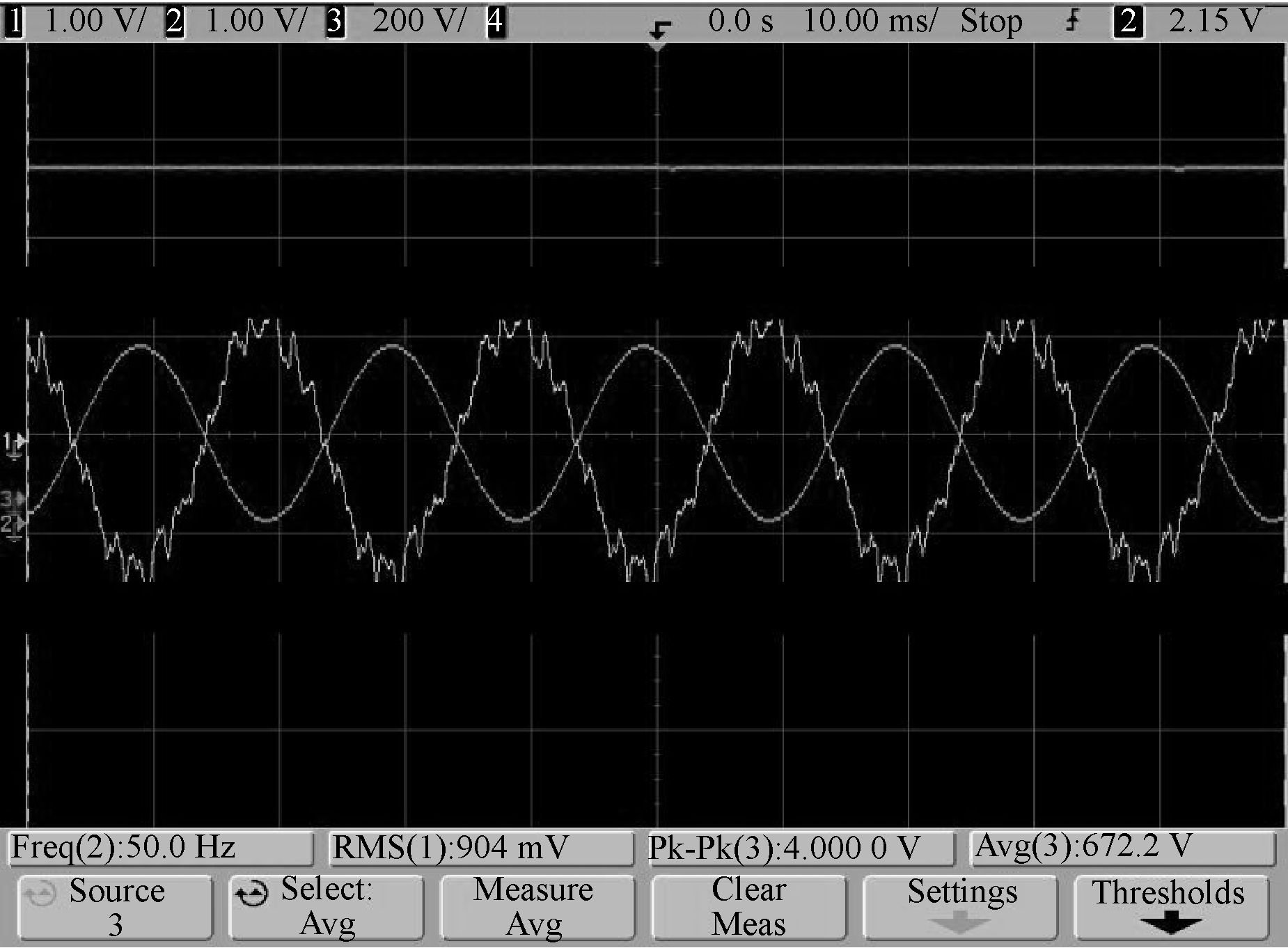
(b) 逆变工况时的相电压、相电流和直流电压波形
图10 四象限变流器在整流工况和逆变工况工作时的
相电压、相电流和直流电压波形
针对采煤机牵引四象限变流器特点,设计了全数字化智能控制的高性能采煤机牵引四象限变流器驱动控制系统。该系统具有电路简洁、模块化强、参数设置灵活、动态性能好、能量双向流动的特点。现场调试结果表明,系统在整流工况工作时,可输出稳定的直流电压,能够适应波动范围较大的输入电源;在逆变工况工作时,制动能量能快速回馈电网,无需外加制动单元,实现了采煤机的快速制动,为采煤机提供持续的制动力,提高了采煤机牵引运行的控制性能和可靠性,具有较好的工程应用推广价值。
参考文献:
[1] 贾剑,纪红英.变频技术在采煤机调速系统的应用[J].煤矿机械,2013,34(4):223-224.
[2] 庄德玉.采煤机用4象限变频器前端LCL滤波器设计[J].电气传动,2001,44(8):55-58.
[3] 张章,宋海峰.电压型四象限变流器死区补偿方法研究[J].电源技术应用,2012,15(8):29-34.
[4] 刘陵顺,张勇.PWM逆变器死区效应的检测与补偿[J].电测与仪表,2001,38(6):34-36.
[5] 刘振坚.VVVF变频器在采煤机上应用的几个问题[J].煤炭科学技术,2000,28(7):38-41.
[6] 唐益宏.15 kW电压型四象限变流器系统研究[D].北京:北京交通大学,2004.
[7] 张兴,张崇魏.PWM整流器及其控制[M].北京:机械工业出版社,2012.
[8] 陈瑶,童亦斌,金新民.基于PWM整流器的SVPWM谐波分析新算法[J].中国电机工程学报2007,27(13):76-80.
[9] 周卫平,吴正国,唐劲松,等.SVPWM的等效算法及SVPWM与SPWM的本质联系[J].中国电机工程学报,2006,26(2):133-137.
DENG Yonghong, CAO Haokun, ZHANG Quanzhu
(Institute of Information and Control Technology, North China Institute of Science and Technology, Sanhe 065201, China)
Abstract:The paper designed a new drive and control system of 4-quadrant converter for traction shearer according to index requirements of 4-quadrant converter of shearer, and introduced design of hardware circuit and software implementation of the system. The field experiment results show that the system realizes fast braking of shearer, provides continuous braking force for shearer, and improves control performance and reliability of traction operation for shearer, which has good popularization value for engineering applications.
Key words:shearer; 4-quadrant converter; synchronous PI decoupling current control; traction frequency converter
文章编号:1671-251X(2016)07-0020-06
DOI:10.13272/j.issn.1671-251x.2016.07.006
收稿日期:2016-04-01;修回日期:2016-05-25;责任编辑:张强。
基金项目:廊坊市科技支撑项目(2015011017);中央高校基本科研业务费资助项目(3142013101,DX2013B05,3142015023)。
作者简介:邓永红(1975-),男,湖南涟源人,讲师,硕士,研究方向为电力电子与电能变换技术、微型计算机控制技术,E-mail:dyhsyjdyx@163.com。
中图分类号:TD632
文献标志码:A 网络出版时间:2016-07-05 14:57
邓永红,曹浩堃,张全柱.采煤机牵引四象限变流器驱动控制系统设计[J].工矿自动化,2016,42(7):20-25.