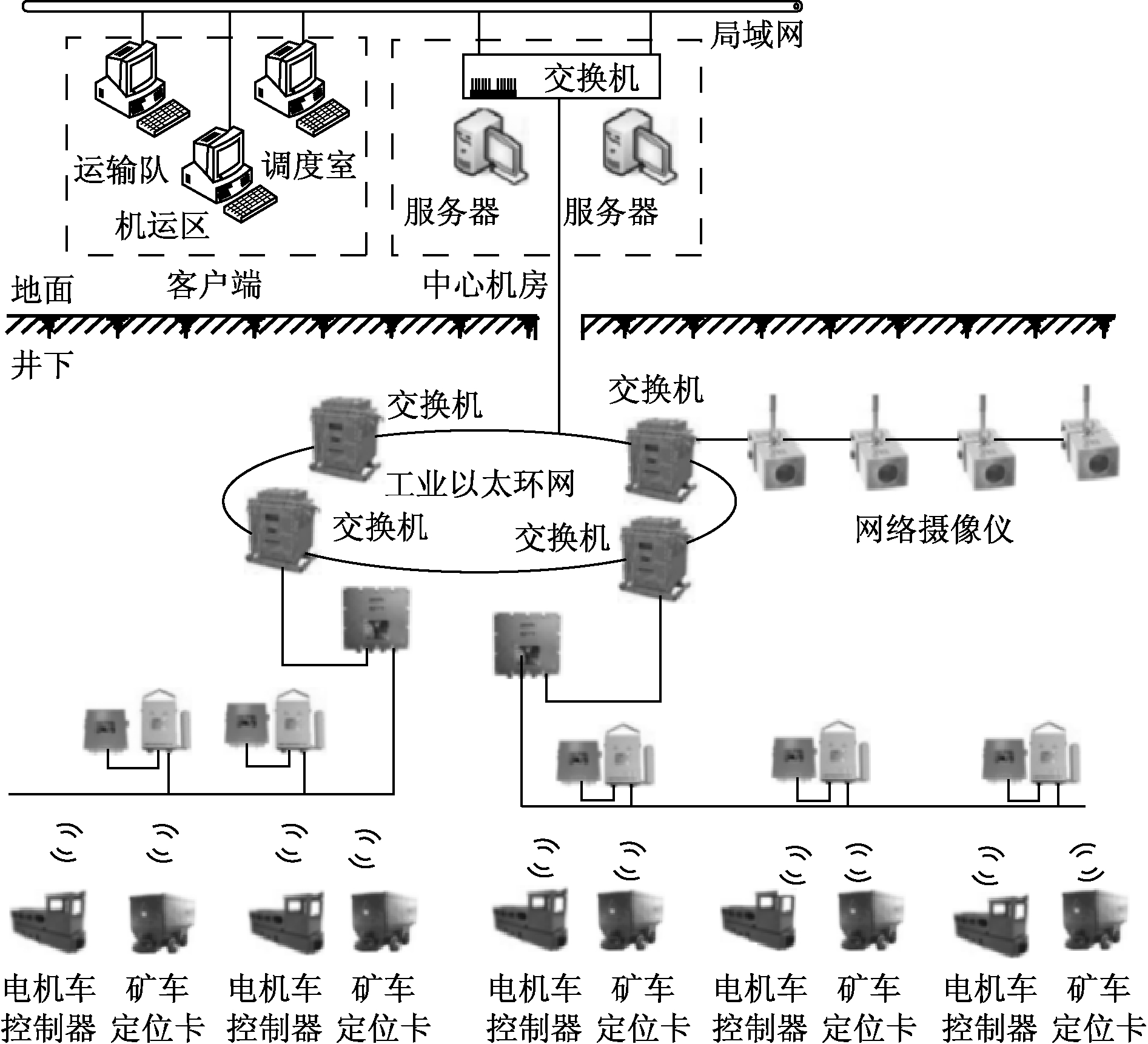
图1 矿井电机车安全防护系统网络结构
李军鸿
(平顶山天安煤业股份有限公司 八矿, 河南 平顶山 467000)
摘要:针对现有煤矿井下电机车安全控制不能有效防止闯红灯、追尾和相撞的问题,设计了一种矿井电机车安全防护系统。该系统采用射频无线通信技术,利用信集闭信号控制电机车安全运行,实现了闯红灯报警、车辆距离提示和超速行驶控制等功能。实际应用表明,该系统提高了电机车运输的安全性,大幅降低了运输事故发生率。
关键词:矿井电机车; 安全防护; 无线通信; 信集闭系统; 闯红灯报警; 车距控制; 超速控制
网络出版地址:http://www.cnki.net/kcms/detail/32.1627.TP.20160601.1034.018.html
平顶山天安煤业股份有限公司八矿(以下简称平煤股份八矿)大巷全长近20 km,现运行36台CDXT2-12J型蓄电池电机车,245台底卸式5 t矿车,880台2 t矿车,45台人车,220台其他材料设备车,井下合计运行1 426台各种用途车辆。井下大巷原煤、矸石、材料、设备、人员运输任务繁重,电机车运输频次高,管理难度大,安全事故时有出现。虽然大巷运输采用了矿井电机车运输监控系统,但电机车司机操作失误或误闯红灯发生相撞和追尾事故,车辆超速造成掉道事故,调车、倒车误撞事故,车辆与巷道管线刮蹭事故等时有发生。为防止这些事故的发生,矿井电机车设计有防撞功能,通过车架前后端装有的弹性缓冲器,在碰撞时缓冲和吸收碰撞能量,以减轻撞击时对电机车的危害。但缓冲器能够吸收的能量有限,无法起到较好的防撞缓冲效果[1]。另外,电机车还安装有车载瓦斯断电仪和过电流保护等简单的安全防护装置,但这些保护装置不能满足井下安全运输的需要。目前地面机动车辆所采用的防撞预警或刹车装置工作原理:红外线、超声波、激光、无线电等发生器发出的信号被反射回来,接收器对接收到的信号进行判断处理,然后报警或刹车。由于煤矿井下环境恶劣,巷道狭窄昏暗,岔道及弯道较多,车辆与巷帮间距较小,在电机车运行到大巷弯道等处时,车身上安装的传感器发出的电磁波经常被巷道、巷道内的管线及煤尘等阻挡反射造成误报警、误动作,不能可靠工作[2]。为此,平煤股份八矿结合现有电机车运输信集闭系统、人员定位系统和矿井1 000 MB工业以太网系统,与有关厂家合作,设计了矿井电机车安全防护系统,提高了矿井电机车运输的安全可靠性。该矿井电机车安全防护系统综合采用射频、超声波、霍尔等多种技术手段检测电机车及周边数据,实现了电机车安全预警及防护功能。
平煤股份八矿现已运行井上、井下工业以太环网、电机车信集闭系统、人员定位系统等,应尽可能利用原有系统,在原有系统架构上设计完善电机车安全防护设施[3]。矿井电机车安全防护系统扩展了原有的人员定位系统,将单一人员定位升级为矿车及人员定位,通过定位分站采集电机车自身运行工况和环境数据,并通过信集闭系统和工业以太网传输整合数据,系统网络结构如图1所示。
每台电机车安装有电机车控制器、触摸屏显示器,用于监测电机车运行数据和位置,控制电机车制动和开停。每台电机车还安装了多波段射频接收和发射装置,接收大巷信集闭系统的红绿灯信号和周边人员车辆位置信号。每台矿车安装有矿车定位卡,读卡分站采用原有人员定位分站,负责采集井下人员及矿车位置等数据,读卡分站读取数据后,通过井下交换机将数据传输至井下工业以太网。同时,利用网络摄像仪采集大巷乘车点、放煤站、关键巷道交叉口等视频信息,并将信息传输至工业以太网。中心机房服务器将接收的电机车运行信息进行分类整理,并根据报警条件产生报警信息,形成统计报表,为运输调度提供依据。
图1 矿井电机车安全防护系统网络结构
矿井电机车安全防护系统可以实现电机车运输过程中闯红灯报警、防追尾、防相撞、防超速行驶、防倒车误撞等功能。借助综合自动化、信息化网络平台,结合工业以太网、射频通信技术、数据库技术,系统还可及时、准确显示井下各个采区电机车和矿车的动态情况,掌握井下电机车、矿车的分布状况和每台车辆的运动轨迹。
(1) 闯红灯报警功能。 当电机车运行至红绿灯位置,遇到红灯闭锁时,若司机不停车则报警装置动作,可发出报警信息,当电机车司机强行闯红灯时,电机车强制断电停车。电机车闯红灯报警装置采用加装射频电路的红绿灯传感器,通过远程通信模块与电机车控制器通信联系。信集闭系统设定好路线后,电机车按照红绿灯的指示路线行驶,监控画面上显示电机车行驶的速度和位置。信集闭系统分站采用循环扫描的方式采集电机车动态信息,电机车运行至大巷红绿灯位置时,电机车控制器接收模块通过红绿灯传感器采集红绿灯信号[4]。如果得到允许电机车通过的绿灯信号,电机车控制器输出低电平信号,电机车可以继续运行;如果得到禁止电机车通过的红灯信号,电机车控制器输出高电平信号,发出指令控制电机车报警和停车。
(2) 防追尾、防相撞功能。在2辆电机车同向或逆向行驶靠近时,电机车显示屏显示电机车车号、2辆车的车距等信息,根据车距、车辆行驶方向等采用不同控制策略,在接近危险车距时自动控制电机车制动刹车。电机车控制器通过射频模块发射低频无线电波[5],检测周围是否存在其他电机车或矿车,若存在其他车辆,接收其他车辆射频定位卡发出携带车辆ID的低频无线电波,经电机车控制器处理,提取其他电机车的编号信息并在电机车显示屏上显示电机车编号及车距。电机车控制器可以根据接收到的信号判断车距后发出报警信号,从而为电机车的安全运行提供保障。当同一轨道的2辆电机车靠近时,射频模块在发射信号的同时接收到一组信号数据,这组数据经滤波、隔离、整形、放大,判断报警条件是否成立,若成立则发出报警信号,同时降低电机车的运行速度,有效防止同一轨道的电机车发生追尾事故。行驶在相同巷道2条轨道上的电机车防追尾信号通信频率不一样时,不报警。
(3) 防超速行驶功能。速度超过设定值时,电机车控制器输出信号并报警,控制电机车调速器降低车速。速度检测方法是在电机车车轴上安装霍尔传感器,将电机车车轴的转动速度转换为频率信号,电机车控制器对频率信号进行采样计算并得到电机车的实际运行速度。同时,设定2组车速报警值,根据预设报警值比较判断是否进行报警及车辆制动。当电机车运行速度超过设定高速报警值时,电机车控制器发出报警信号,实现声光报警,并控制电机车调速器降低车速。当车速超过危险车速时,电机车控制器可输出一组控制触点,以控制刹车系统,通过气刹制动阀拉臂的动作,使制动阀上、下两腔进风口分别与制动压风相通,储气筒前、后腔空气分别通过制动阀进入后、前制动气缸,制动器进入工作状态,实现电机车气刹控制,控制电机车在危险距离实施刹车,防止电机车超速行驶造成脱轨事故。
(4) 防倒车误撞功能。利用超声波测距原理测量电机车与障碍物的距离,超声波发射器向特定方向发射超声波,当超声波遇到障碍物就反射回来,超声波接收器负责接收反射信号。由于超声波在空气中的传播速度是固定的,所以通过测量发射和接收超声波的时间差就可以测量电机车与障碍物的实际距离[6]。电机车防倒车误撞装置由收发一体式超声波探头、电机车控制器、显示器等组成,超声波探头安装在电机车两端。当电机车开始进入倒车时,防倒车误撞装置自动触发,相关电路开始工作,超声波探头在上下左右各方向搜寻障碍物,发射模块发送40 kHz的超声波,接收模块检测处理返回的超声波信号,通过间隔时间计算出电机车车体与障碍物之间的实际距离,并在显示器上显示计算结果。当电机车车体与障碍物间距接近一定距离时,报警器触发,提醒司机注意安全,超过危险距离时,禁止电机车启动。
矿井电机车安全防护系统对电机车司机常见的违章行为和常见的事故类型采取了相应的防范措施,在电机车运行中减少了人为闯红灯、超速行驶等事故的发生,能有效提醒司机注意电机车间距过近、倒车等危险因素。该系统完善了原有电机车信集闭系统,可通过无线通信实现对电机车运行数据的采集与管理,还可以实现矿车的定位和调度管理功能。矿井电机车安全防护系统已在平煤股份八矿二水平大巷投入试用,明显减少了电机车超速行驶、闯红灯等行为,降低了电机车事故发生率。
参考文献:
[1] 黄运华,李芾,傅茂海.车辆缓冲器特性研究[J].中国铁道科学,2005,26(1):95-99.
[2] 王晓宏,牛广勤,郝海军,等.智能化电机车防撞系统的可行性研究[J].煤,2009,18(2):10-12.
[3] 谭得健.我国煤矿自动化现状及发展趋势[J].工矿自动化,2010,36(9):126-129.
[4] 魏臻,陆阳.矿井移动目标安全监控原理及关键技术[M].北京:煤炭工业出版社,2011:114-116.
[5] 安裕强,王庭有,杨斌.基于射频识别和PLC的地下金属矿山有轨机车监控系统[J].有色金属(矿山部分),2011,63(5):67-70.
[6] 于海存,王官.基于超声测距的智能车辆防追尾安全测控仪[J].仪表技术与传感器,2013(6):37-39.
LI Junhong
(No.8 Coal Mine, Pingdingshan Tian'an Coal Mining Co.,Ltd., Pingdingshan 467000 ,China)
Abstract:In view of problems that existing coal mine electric locomotive safety control cannot effectively prevent red light running, rear-end collision and collision, a kind of safety protection system of mine electric locomotive was designed. The system adopts radio frequency wireless communication technology and uses signals of signal, integrated and blocked system to control safe operation of the electric locomotive, which realizes functions of red light alarm, vehicle distance presentation and over-speed control. The practical application shows that the system improves security of electric locomotive transportation, and greatly reduces rate of transportation accidents.
Key words:mine electric locomotive; safety protection; wireless communication; signal, integrated and blocked system; red light alarm; vehicle distance control; over-speed control
文章编号:1671-251X(2016)06-0077-03
DOI:10.13272/j.issn.1671-251x.2016.06.019
收稿日期:2015-12-15;
修回日期:2016-03-10;责任编辑:张强。
作者简介:李军鸿(1968-),男,河南鲁山人,高级工程师,现主要从事煤矿机电技术管理工作,E-mail:zhhr1968@163.com。
中图分类号:TD64
文献标志码:B 网络出版时间:2016-06-01 10:34
李军鸿.矿井电机车安全防护系统设计[J].工矿自动化,2016,42(6):77-79.