图1 管道清堵机器人工作原理
科研成果
魏明生1,2, 童敏明1, 张春亚2, 夏静3
(1.中国矿业大学 信息与电气工程学院, 江苏 徐州 221008; 2.江苏师范大学 物理与电子工程学院,江苏 徐州 221116; 3.南京理工大学 机械工程学院, 江苏 南京 210094)
摘要:介绍了管道清堵机器人的定位原理,依据磁偶极子模型分析了管道外极低频电磁信号的分布规律,建立了管道清堵机器人一维定位方法,并设计了管道清堵机器人电磁定位系统。实验结果表明,该系统可以实现对机器人的有效定位,当接收天线分别以5 m/s和10 m/s的速度移动时,定位误差范围分别为-20.7~19.8 cm和-24.3~27.1 cm,完全满足工程的精度要求。
关键词:机器人; 管道清堵; 磁偶极子模型; 电磁定位
网络出版地址:http://www.cnki.net/kcms/detail/32.1627.TP.20160601.1009.001.html
矿井水灾是煤矿常见的主要灾害之一,一旦矿井发生透水,会影响矿井的正常生产,同时还会淹没矿井和采区,造成人员伤亡,危害十分严重。煤矿主排水系统是煤矿水害防治的主要手段,它的安全可靠性直接关系到矿井作业人员的安全。煤矿主排水管线经过一定年限排水工作后,其管道内壁会结垢从而造成通流面积减小、排水阻力加大及电耗增加,最终导致主排水系统的排水能力大大下降。同时由于沉积物会不同程度地腐蚀管道内壁,直接影响排水安全和工作效率。利用管道机器人进行在线清理是解决上述问题的有效途径[1-2]。为此,笔者设计了管道清堵机器人电磁定位系统。
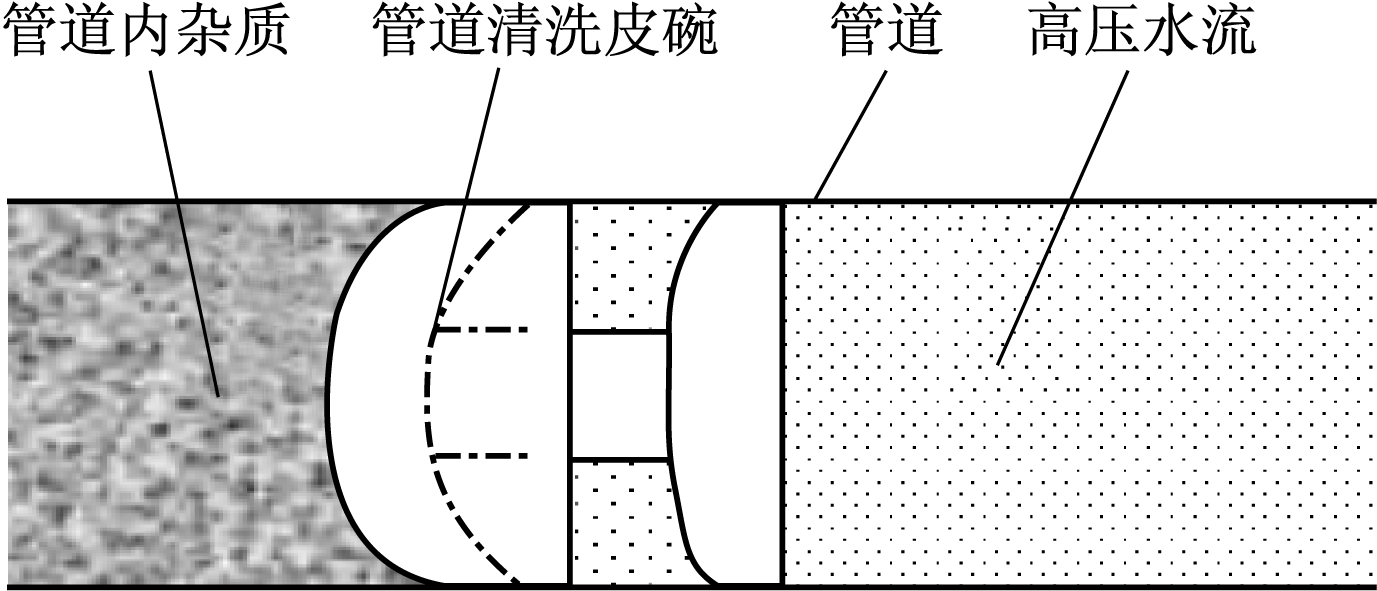
管道清堵机器人工作原理如图1所示。在工作中,管道机器人依靠高压水流推进,皮碗形状的前端驱动结构把管道壁及管道内的沉积物等杂质依次推出,对管道进行清理。
图1 管道清堵机器人工作原理
管道清堵机器人进行在线清理工作时,有时会出现故障,造成机器人堵塞或安全牵引装置失去作用,这时需要准确确定机器人在管道内的具体位置,以便清堵或维修。因此,管道内机器人的定位成为其安全工作的重要保障。要实现管道机器人定位,首先要解决管道内机器人和外界的通信问题,由于普通铁质管道的屏蔽作用,使得常规的声、光、电等通信手段受到屏蔽,传统的无线通信手段很难应用到管道机器人的定位中。
极低频电磁信号能够穿透岩石、海水及一定厚度的金属,适用于管道内外的通信,可在管道机器人定位中应用[3-5]。
管道机器人定位原理如图2所示。管道机器人内放置1个通有23.5 Hz交流脉冲的发射线圈,间断发射无线极低频电磁脉冲,管道外放置1个接收线圈,通过感应管道内发射线圈的极低频电磁信号,产生交流信号。当管道外接收线圈和管道内发射线圈靠近时,就会感应出具有一定电动势的交流脉冲信号,而且随着机器人和接收线圈距离变小,接收线圈感应的电动势越来越大。发射线圈发射出的极低频电磁信号在管道外空间的分布规律是实现机器人定位的关键。
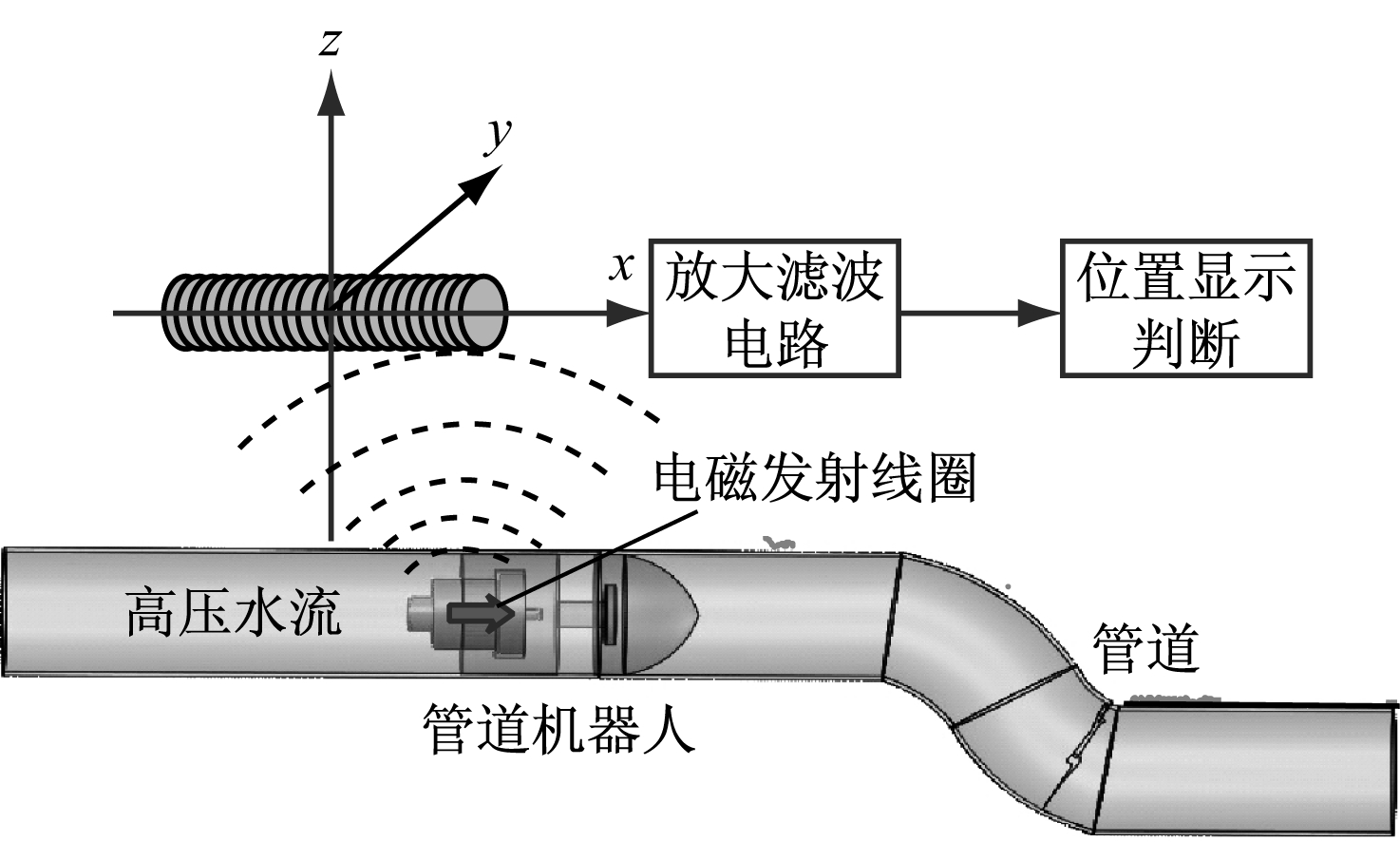
图2 管道机器人定位原理
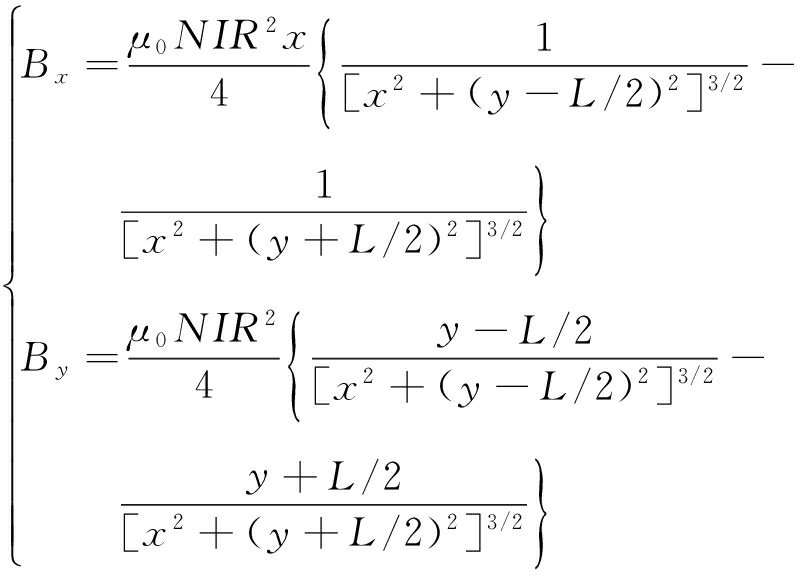
极低频电磁发射装置可等效为一个密绕的螺线管线圈,现以线圈的中心为坐标原点,建立空间柱坐标系,如图3所示。图3中,L为线圈长度,根据比奥—萨法尔定律,坐标系中任一点P(x,θ,y)的磁感应强度如式(1)所示[6]。
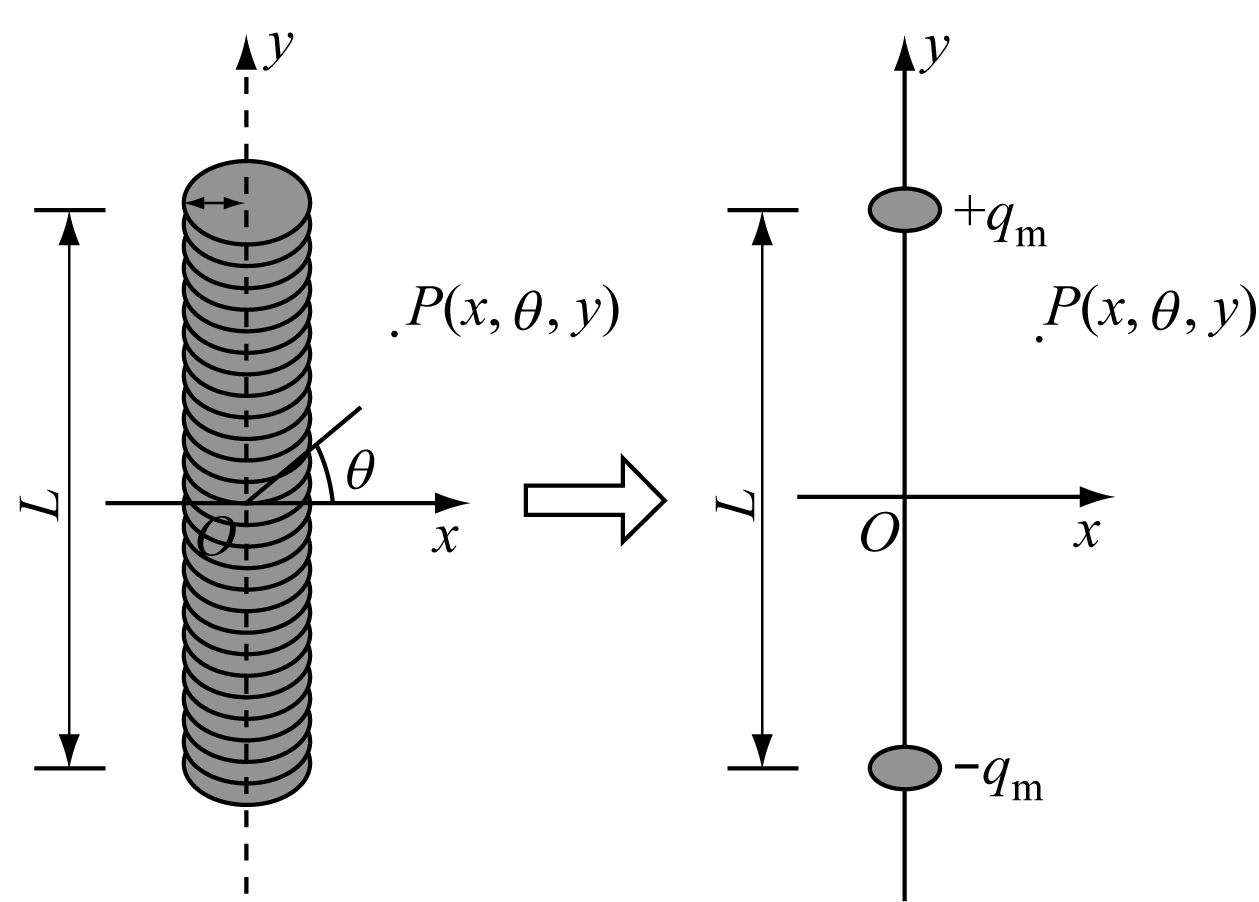
图3 线圈模型及其磁偶极子简化模型

(1)
式中:μ0为自由空间中的磁导率;N为匝数;I为线圈电流;R为螺线管电磁发射线圈的半径。
在实际的工程应用中,因为发射线圈半径一般远小于发射线圈长度L,所以空间某点的电磁分布模型可采用磁偶极子模型对线圈模型进行合理简化。将半径为R、长为L的线圈等效为一对相距L的磁偶极子±qm,磁偶极子模型下的空间磁感应强度分布为
(2)
根据式(2),对空间内的磁感应强度进行数值分析,得到磁感应信号的分布规律,如图4、图5所示。
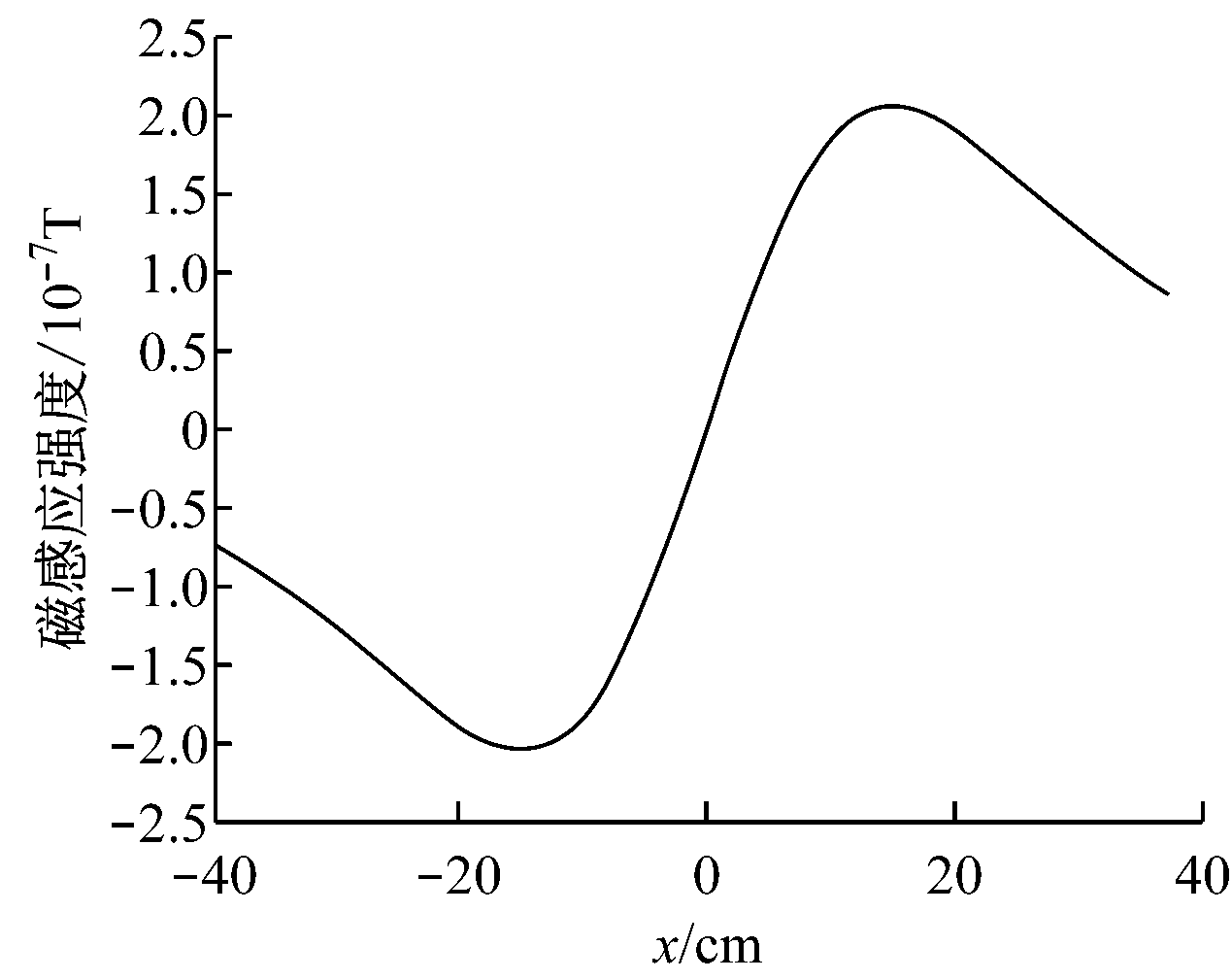
图4 线圈垂直方向的磁场
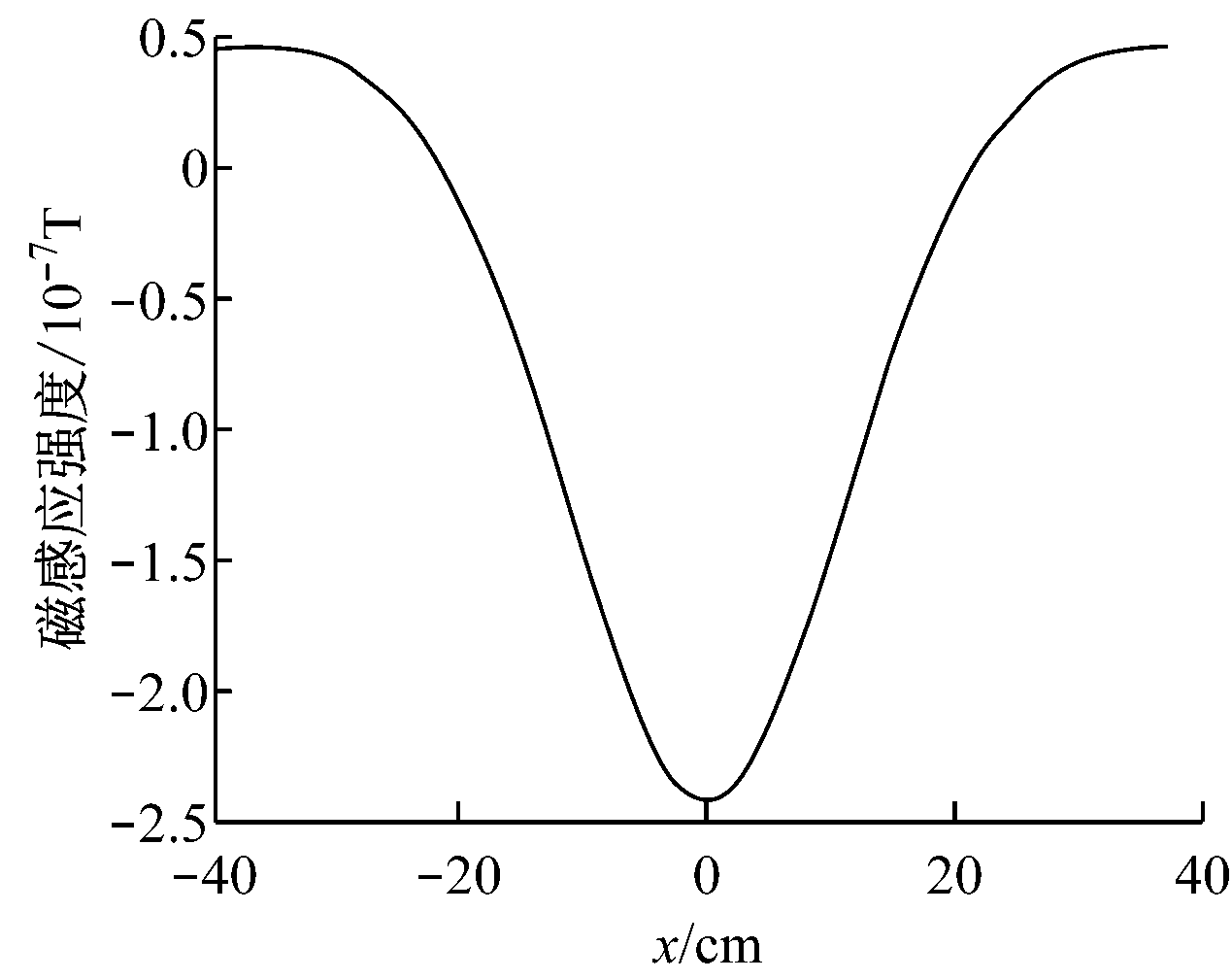
图5 线圈平行方向的磁场
由图4、图5可知,垂直方向的磁感应强度包络线关于发射机中心呈双峰对称分布,左右两边的磁感应强度方向相反,垂直发射线圈中心方向的磁感应强度为零。平行于发射线圈中心的磁感应强度包络线在发射机的中心处强度最大,相对于发射机呈主峰对称分布。根据发射机磁感应强度的分布规律,通过管道外接收天线的移动产生相应的感应电动势,由感应电动势的大小和变化规律可以对管道机器人进行精确定位。
根据对管道外极低频电磁信号空间分布的分析,采用图2所示的方案对已知走向管道内的机器人实现一维定位。管道清堵机器人电磁定位系统主要分为2个部分,一是管道内的极低频电磁信号发射系统,二是管道外的信号接收系统。
3.1 极低频电磁信号发射系统
极低频电磁信号发射系统采用单片机控制电路,在线圈中通入时变电流I(t)=Imexp(iωt),发射23.5 Hz极低频电磁信号。单片机将极低频正弦脉冲信号离散化,并发射离散的数字信号,驱动16位DA转换器MAX541,然后通过DA转换和放大器输出23.5 Hz极低频电压信号,通过发射线圈发射。采用0.2 mm的漆包线缠绕12 000圈作为发射天线。极低频电磁信号发射电路如图6所示。
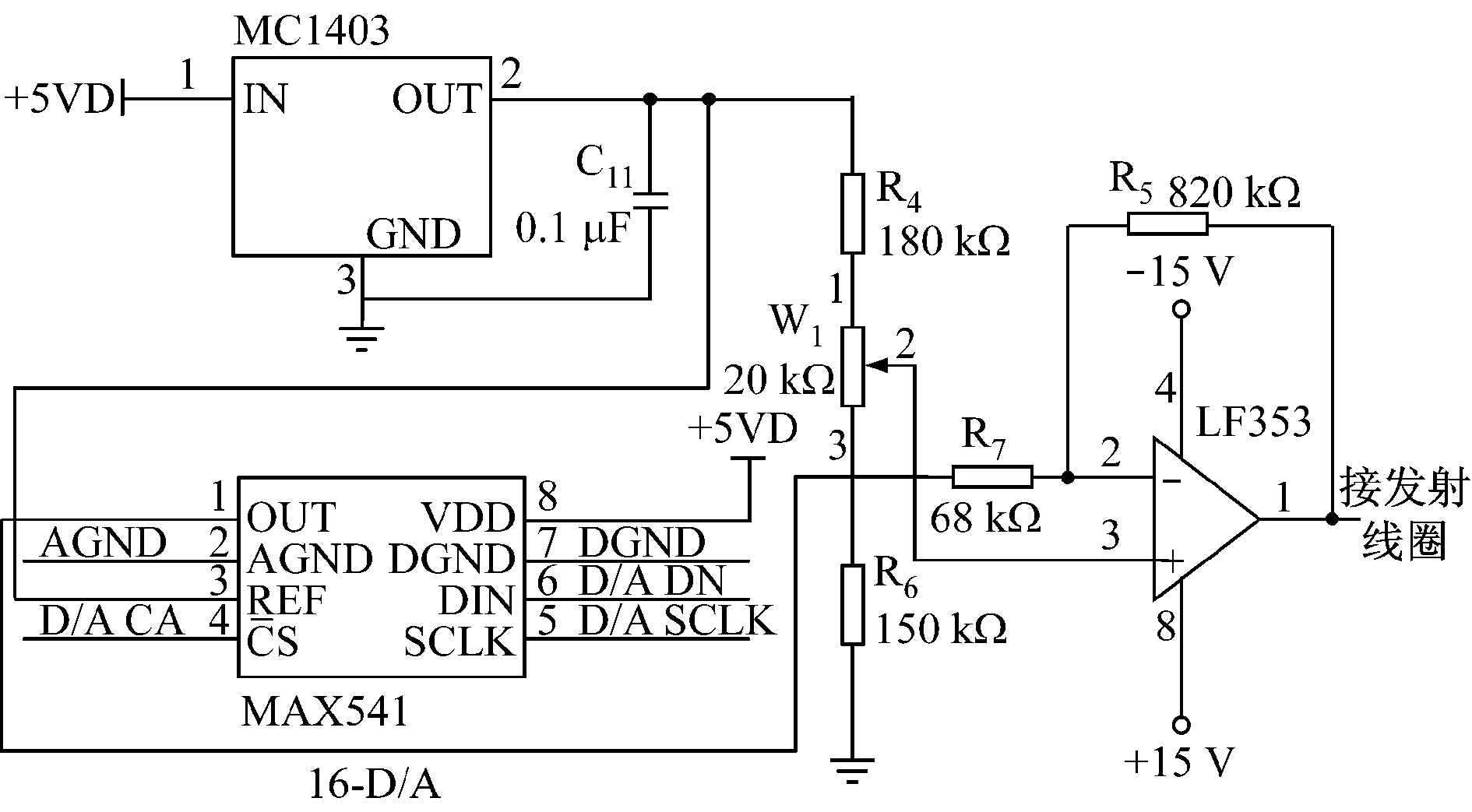
图6 极低频电磁信号发射电路
连续发射12个正弦脉冲后,间断1.5 s再继续发送信号,即发送的低频正弦信号占空比为1:3,管道内电磁信号间断发射,达到了省电目的。MAX541为低功耗16位DA转换芯片,无缓冲电压输出,转换时间为1 μs,采用该芯片输出23.5 Hz极低频电压信号,经过运算放大器接发射线圈。极低频电磁信号如图7所示。
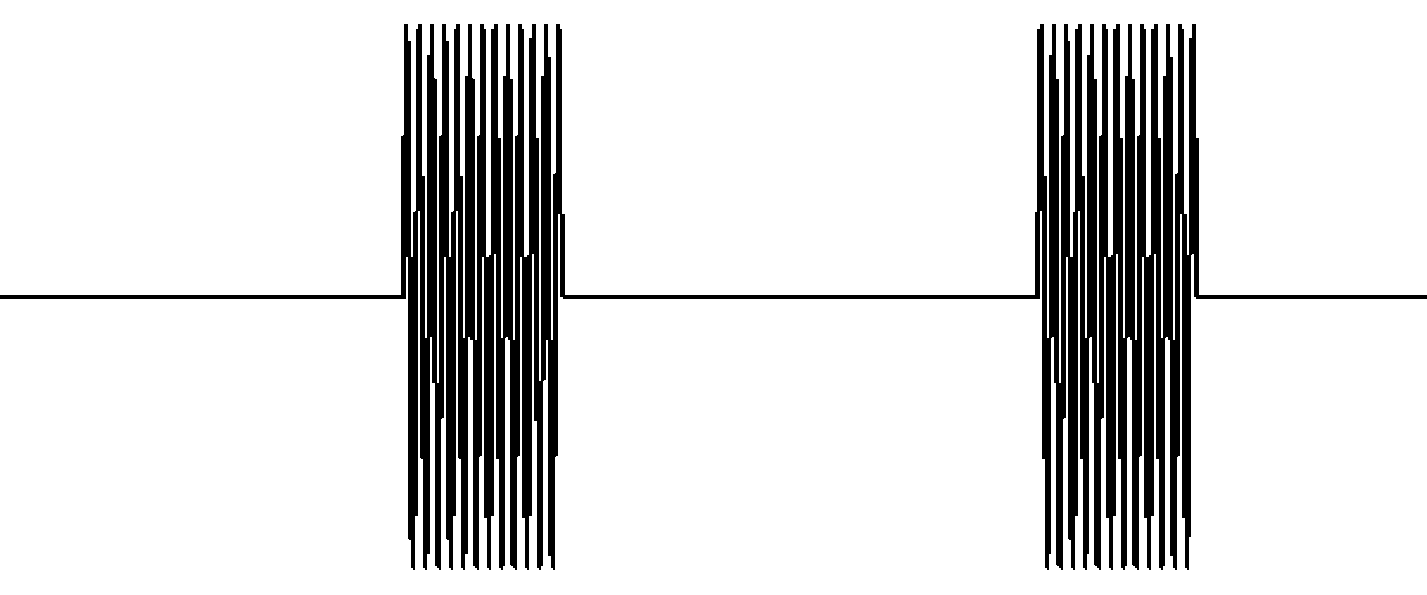
图7 极低频电磁信号
3.2 信号接收系统
在实际工况条件下,接收信号极其微弱且含有大量干扰噪声,因此,需要对信号进行放大和滤波,当信号强度大于一定值时,系统自动判断和识别机器人的位置。信号接收系统结构如图8所示。
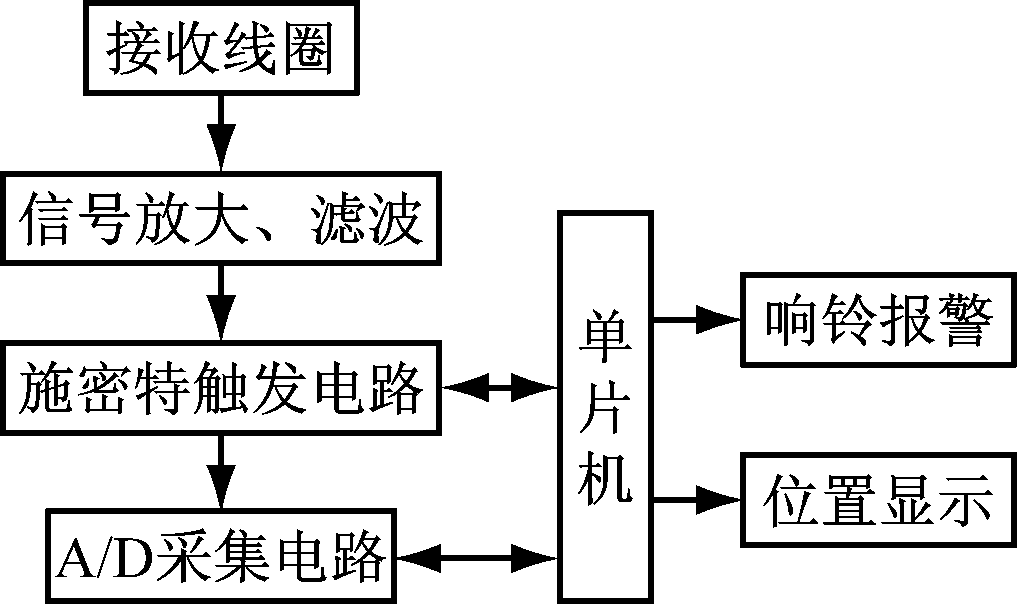
图8 信号接收系统结构
接收线圈采用0.1 mm漆包线缠绕24 000圈形成,线圈缠绕后放在由尼龙做成的圆筒内进行封装,由导线连接到信号调理电路上。磁感应线圈的感应电动势为
(3)
式中:Φ为磁通量;B为平行于传感器轴线的磁感应强度。
采用6级滤波和放大电路进行信号调理。首先采用2个无限增益多路反馈巴特沃斯低通滤波器进行低通滤波和放大,低通截止频率为28 Hz;然后采用切比雪夫高通滤波器进行滤波,高通滤波截止频率为18 Hz;最后设计了具有高Q值的双T带通滤波器进行带通滤波,并对信号进行放大。双T带通滤波电路如图9所示。
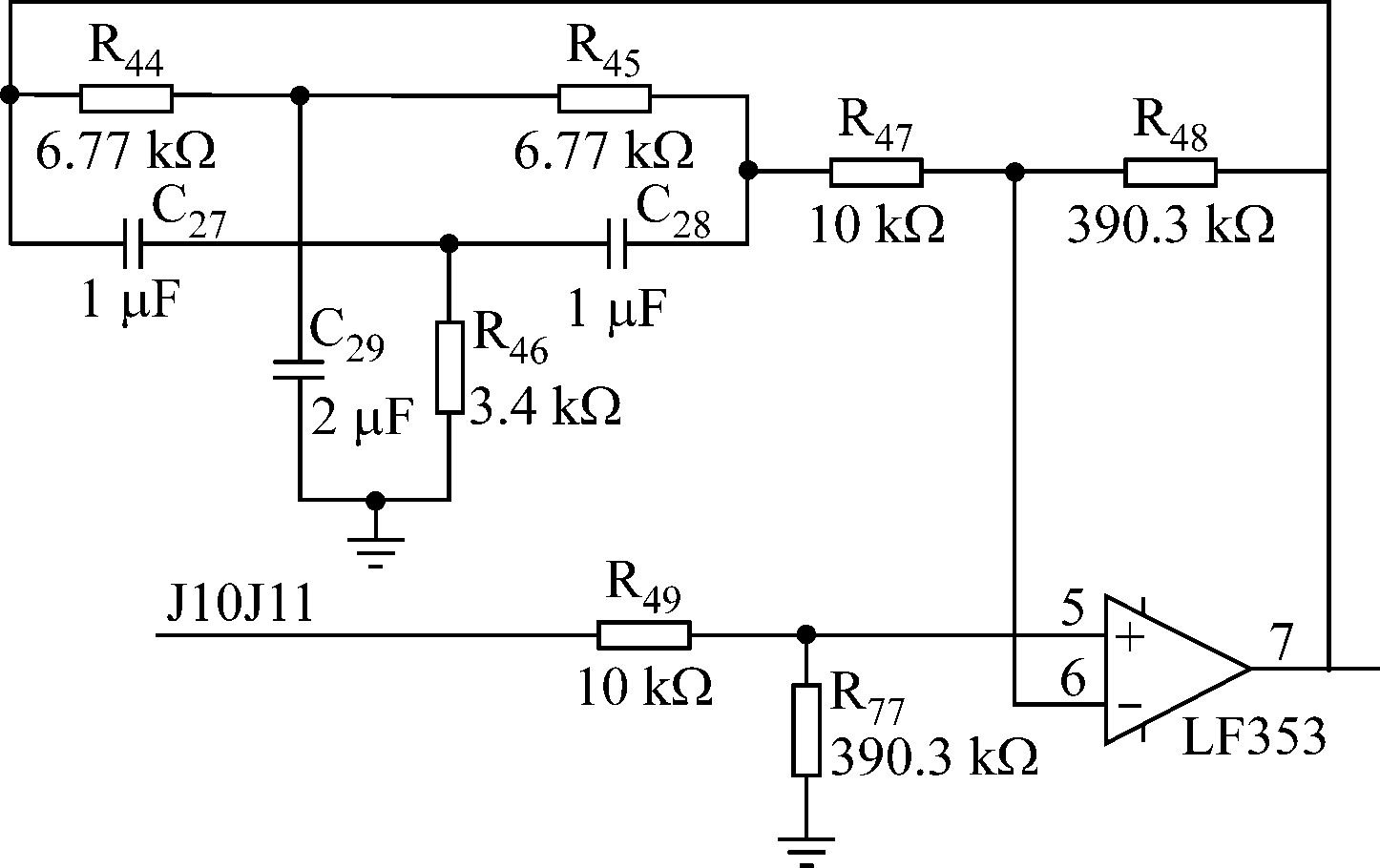
图9 双T带通滤波电路
有源带通滤波器的关键部分是双T选频网络,该滤波器由2个T型电路并联而成。从图9可看出,其中一个T型电路由6.77 kΩ电阻和1 μF电容组成,另一个T型电路由3.4 kΩ电阻和1 μF电容组成。陷波带阻滤波器的输出信号连接到放大器的负向输入端,通过运算放大器后达到滤波目的。
滤波器的中心频率为
(4)
信号采集部分采用施密特触发器触发单片机进行采集。当接收天线和管道机器人距离较远时,接收天线接收到的信号较小,施密特触发器不被触发,单片机接收不到采集的有用信号;当距离较近时,接收天线接收的信号被施密特触发器触发,被采集为数字量送到单片机中。考虑到信号干扰等影响,程序设定当采集的信号为6个及以上23.5 Hz正弦信号时,单片机认为接收到了机器人的信号。
当接收天线平行于管道时,接收信号最大的时刻就是和管道机器人距离最近的时刻。当接收天线与管道垂直放置时,根据图5所示的发射线圈电磁特性,接收到的信号先增强,然后变弱,然后再增强。当天线和管道垂直时,接收的信号最弱,机器人处于2个强信号的中间位置。单片机对采集的信号进行识别,当采集的电磁信号大于一定数值时,进行语音提示,同时显示采集信号的强度,工作人员可以根据采集信号强度的变化规律进行识别定位。
采用组合天线与发射机平行和垂直方法进行管道机器人的定位。开始时,操作人员手持天线与管道平行行走,当工作人员靠近机器人发射机时,接收天线接收的磁感应强度逐渐增强,产生的电动势也渐渐升高;当工作人员走过管道机器人发射机的位置时,感应电动势逐渐变弱,这时工作人员应该返回到刚才信号最强的位置,把天线调整到和管道垂直的位置,同样慢慢移动天线;当接收信号完全消失时的位置就是管道机器人的位置。采用此方法,选择了一段新铺设的管道进行实验研究,进行了18个点的定位。实验管道的材料为合金钢,管壁厚度为5.74 mm,发射天线距离管道6 m左右,当工作人员以5 m/s的速度移动时,平均定位误差为-20.7~19.8 cm;当移动速度为10 m/s时,平均定位误差为-24.3~27.1 cm,完全满足工程技术要求。
介绍了管道清堵机器人定位系统的总体设计,建立了低频信号电磁空间分布的理论模型,推导出了电磁强度的表达式并进行了数值分析。实验结果表明,设计的管道清堵机器人定位系统可以实现清堵机器人运动状态下的快速、精确定位,定位精度满足工程技术要求。
参考文献:
[1] 赵宝华.管道机器人在线清理技术在煤矿的研究与应用[J].能源技术与管理,2015(3):162-164.
[2] 刘清友.油气管道机器人技术现状及发展趋势[J].西华大学学报(自然科学版),2016,35(1):1-6.
[3] 魏明生,童敏明,訾斌,等.管道机器人无线电磁自适应定位技术[J].光学精密工程,2012,20(4):772-781.
[4] 魏明生,童敏明,訾斌,等.基于粒子群-拟牛顿混合算法的管道机器人定位[J].仪器仪表学报,2012,33(11):2594-2600.
[5] 郭静波,蔡雄,胡铁华, 等.油气管道中智能机器人跟踪定位关键技术综述[J].仪器仪表学报,2015,36(3):481-498.
[6] QI H M, YE J R, ZHANG X H, et al. Wireless tracing and locating system for in-pipe robot[J]. Sensors and Actuators A: Physical, 2010, 159(1):117-125.
WEI Mingsheng1,2, TONG Minming1, ZHANG Chunya2, XIA Jing3
(1.School of Information and Electrical Engineering, China University of Mining and Technology,Xuzhou 221008, China; 2.College of Physics and Electronic Engineering, Jiangsu Normal University,Xuzhou 221116, China; 3.School of Mechanical Engineering, Nanjing University of Science and Technology, Nanjing 210094, China)
Abstract:Positioning principle of pipeline blockage clearing robot was introduced, the distribution regularities of extremely low frequency electromagnetic signals outside the pipe were analyzed according to magnetic dipole model, one-dimensional positioning method of pipeline blockage clearing robot was established, and electromagnetic positioning system of pipeline blockage clearing robot was designed. Experimental results show that the system can achieve effective positioning of robot, when receiving antennas moves at speed of 5 m/s and 10 m/s, mobile positioning error ranges are -20.7-19.8 cm and -24.3-27.1 cm, which can fully meet project accuracy requirements.
Key words:robot; pipeline blockage clearing; magnetic dipole model; electromagnetic positioning
文章编号:1671-251X(2016)06-0001-04
DOI:10.13272/j.issn.1671-251x.2016.06.001
收稿日期:2016-01-18;
修回日期:2016-04-18;责任编辑:胡娴。
基金项目:国家科技支撑计划项目(2013BAK06B00)。
作者简介:魏明生(1976-),男,山东济宁人,副教授,博士,主要从事传感器检测方面的研究工作,E-mail:weims516@163.com。
中图分类号:TD655
文献标志码:A 网络出版时间:2016-06-01 10:09
魏明生,童敏明,张春亚,等.管道清堵机器人电磁定位系统[J].工矿自动化,2016,42(6):1-4.