图1 井下人员定位系统结构
马京1,2, 胡青松2,3, 宋泊明1,2, 张申2,3
(1.中国矿业大学 信息与电气工程学院, 江苏 徐州 221008;2.中国矿业大学 物联网(感知矿山)研究中心, 江苏 徐州 221008;3.矿山互联网应用技术国家地方联合工程实验室, 江苏 徐州 221008)
摘要:针对RSSI指纹膜定位方法受矿井环境影响较大,而基于航迹推算的定位方法易形成误差累积的问题,设计了基于指纹膜与航迹推算的井下人员定位系统。该系统周期性采集人员的位置信息与运动姿态信息,利用K近邻和峰值检测方法求解指纹定位结果和航迹推算结果,并对定位结果进行加权融合得到目标位置。测试结果表明,该系统明显提高了定位精度和稳定性,对煤矿巷道复杂环境具有较强的适应能力。
关键词:井下人员定位; 指纹膜; 航迹推算; 融合算法
网络出版地址:http://www.cnki.net/kcms/detail/32.1627.TP.20160429.1117.005.html
当前煤矿井下人员定位系统大多采用基于测距的定位方法[1],其核心是采用AOA(Angle of Arrival),TOA(Time of Arrival),TDOA(Time Difference of Arrival),RSSI(Received Signal Strength Indicator)等方法测定目标节点与定位锚节点之间的距离[2-5]。在这些测距方法中,基于TOA和TDOA的定位方法简单、易于实现且精度较高。但是,由于定位对收发节点之间的时间准确性有严格要求,所以,该方法对硬件要求较高。基于RSSI的定位方法无需额外的传感器设备,成本较低,在矿井中得到了广泛应用。但是,RSSI受环境影响较大,定位精度相对较低。基于AOA的定位方法要求节点配备天线阵列或智能天线[3],成本较高,在矿井中尚未得到较多应用。
由于加速度计、磁力计、陀螺仪等运动传感器能够捕捉运动者运动姿态信息,辅以恰当的解算方法,有望实现较为准确的矿井目标定位[4-5]。航迹推算定位不依赖外部其他设备,受环境因素影响小,但是定位误差会随时间累积,且需要提供定位初始位置,不适于长期单独工作。为此,本文综合基于RSSI的指纹定位方法和航迹推算定位方法的优势,设计了煤矿井下人员定位系统,较好地兼顾了定位精度与系统成本等因素的平衡。实验结果表明,该系统有效提高了人员定位精度,具有较强的煤矿巷道环境适应能力。
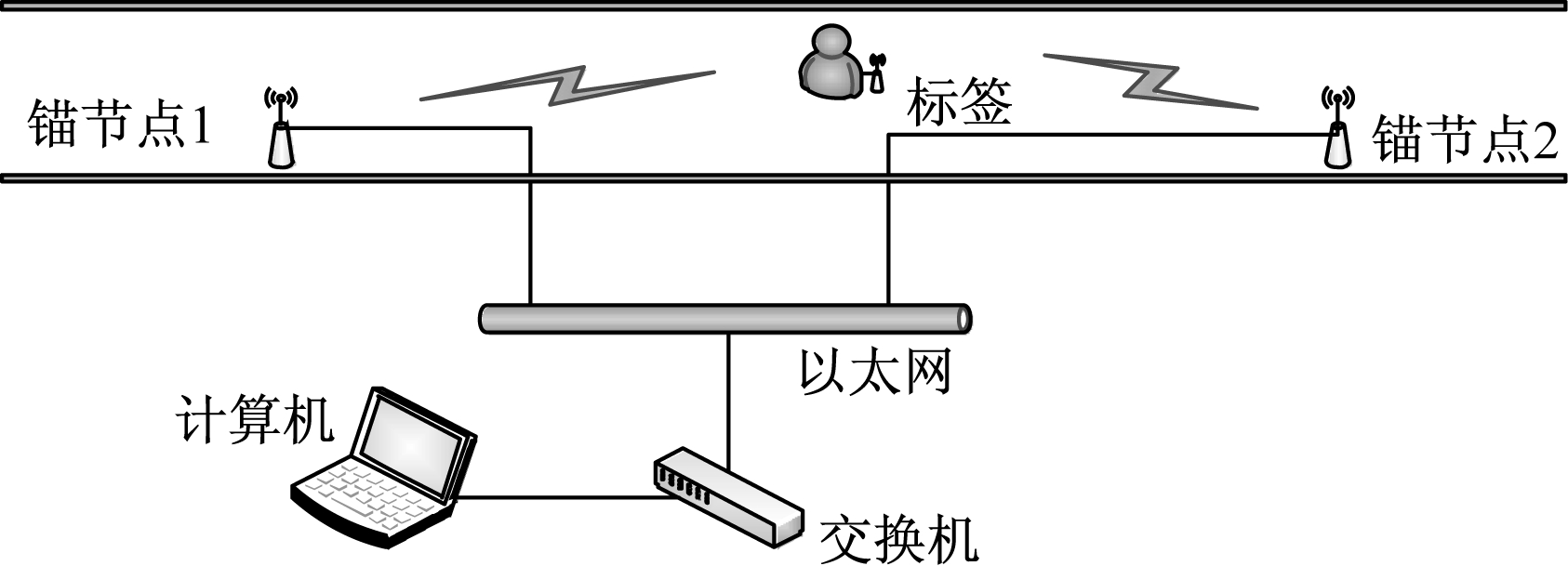
基于指纹膜与航迹推算的井下人员定位系统由定位人员随身携带的标签、锚节点(也称定位基站或基站)、以太网有线传输网络以及上位机解算软件构成,如图1所示。
图1 井下人员定位系统结构
系统定位过程:井下人员携带标签在煤矿巷道移动的时候,标签中的传感器周期性采集人体运动信息并传输给锚节点;锚节点接收到信号后,根据数据距离模型计算出该信号的RSSI值,随后将RSSI值与人员运动信息重新整合成一个新的数据包,通过以太网传输至位于地面的上位机解算软件进行定位信息解算,得到人员的空间位置。
定位标签以CC2530作为主控制芯片,辅以加速度计、磁力计和电源等模块,其结构如图2所示。其中,加速度计ADXL345的量程为±16 g,磁力计HMC5883的量程为±8 Ga。由于锚节点不需要进行数据采集工作,所以,无需包含加速度计和磁力计。
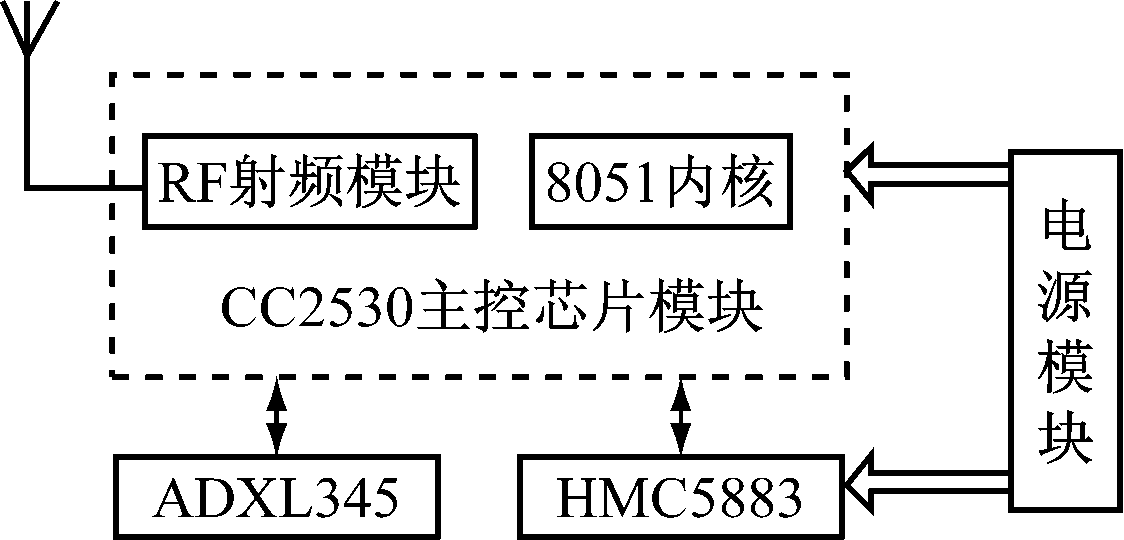
图2 定位标签结构
2.1 RSSI指纹膜定位
RSSI指纹膜定位过程主要分为离线数据采集阶段和在线实时定位阶段[6],如图3所示。
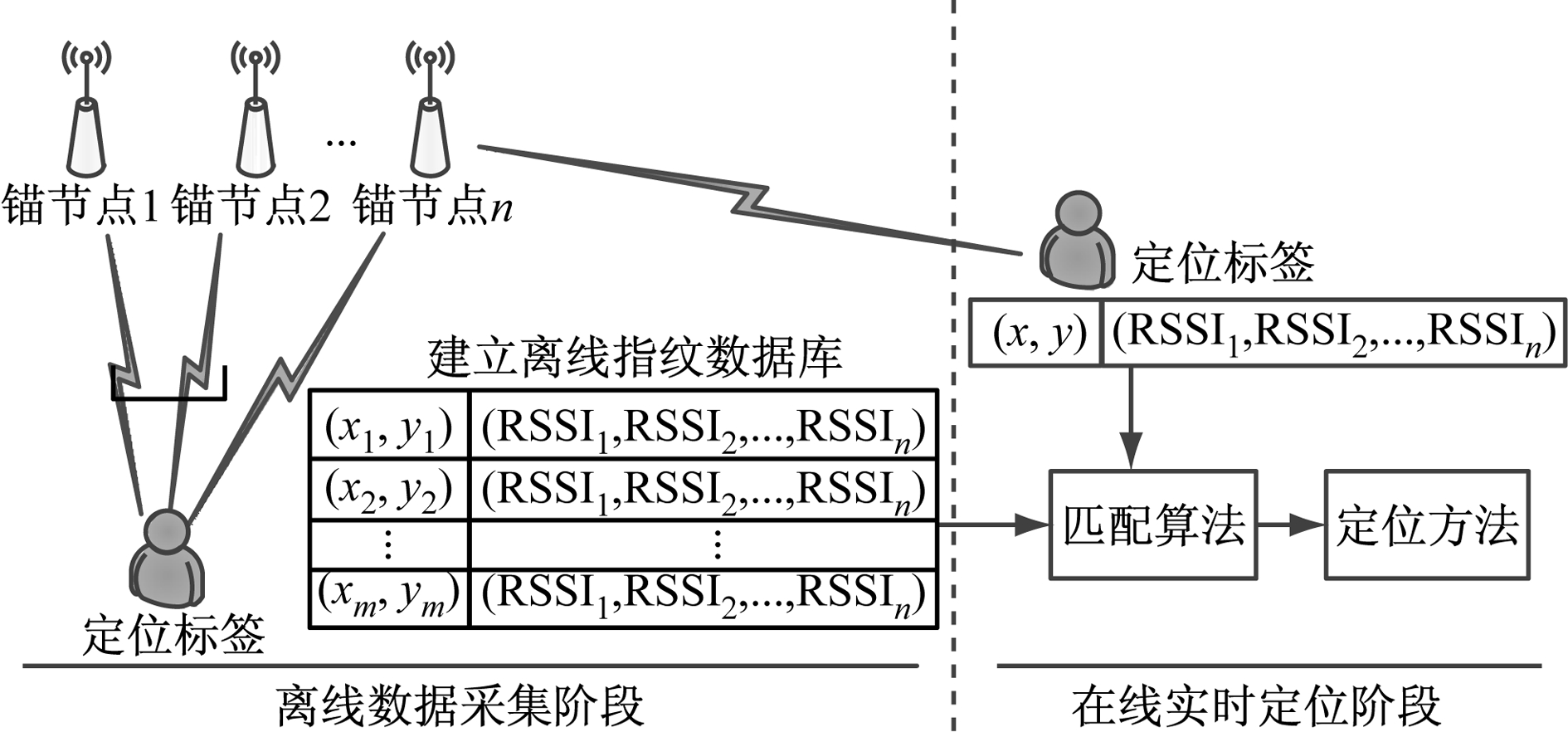
图3 指纹膜定位过程
离线数据采集阶段的主要目标是构建指纹数据库。需将待定位区域按照一定规则划分为若干子区域,在每个子区域内选取一个参考位置,测量该位置处的标签节点所发送的信号到达各个锚节点的RSSI值,所有子区域的信号强度值与其对应的参考点位置构成离线指纹数据库。
在线实时定位阶段将实测RSSI值与指纹数据库中的RSSI值进行匹配,并将指纹数据库中匹配项所对应的位置作为目标节点的估计位置。指纹数据库匹配算法包括确定性算法、神经网络算法等[7-8],其中,最为典型的是确定性方法中的K近邻算法[7]。在该方法中,匹配标准为
(1)
式中:Di为目标节点与第i个参考点的信号强度欧氏距离;n为锚节点个数;i为参考点个数;RSSIi为指纹库中第i个锚节点对应的信号强度;![]() 为第i个锚节点在实时定位阶段测量到的信号强度平均值。
为第i个锚节点在实时定位阶段测量到的信号强度平均值。
在所有的欧氏距离计算完成后,选取其中K个最小的欧氏距离,其对应的参考点即为目标节点的K个相距最近的参考节点,它们的质心即为目标节点的估计位置。为了进一步提高定位精度,使用基于欧氏距离的加权质心算法计算质心位置(x,y):
(2)
式中ωi为加权因子,![]() 。
。
2.2 航迹推算
航迹推算是利用已知的初始位置信息,根据运动传感器提供的航向角和加速度变化信息,推算运动节点下一时刻位置的一种惯性导航定位方法[9],其定位原理如图4所示。
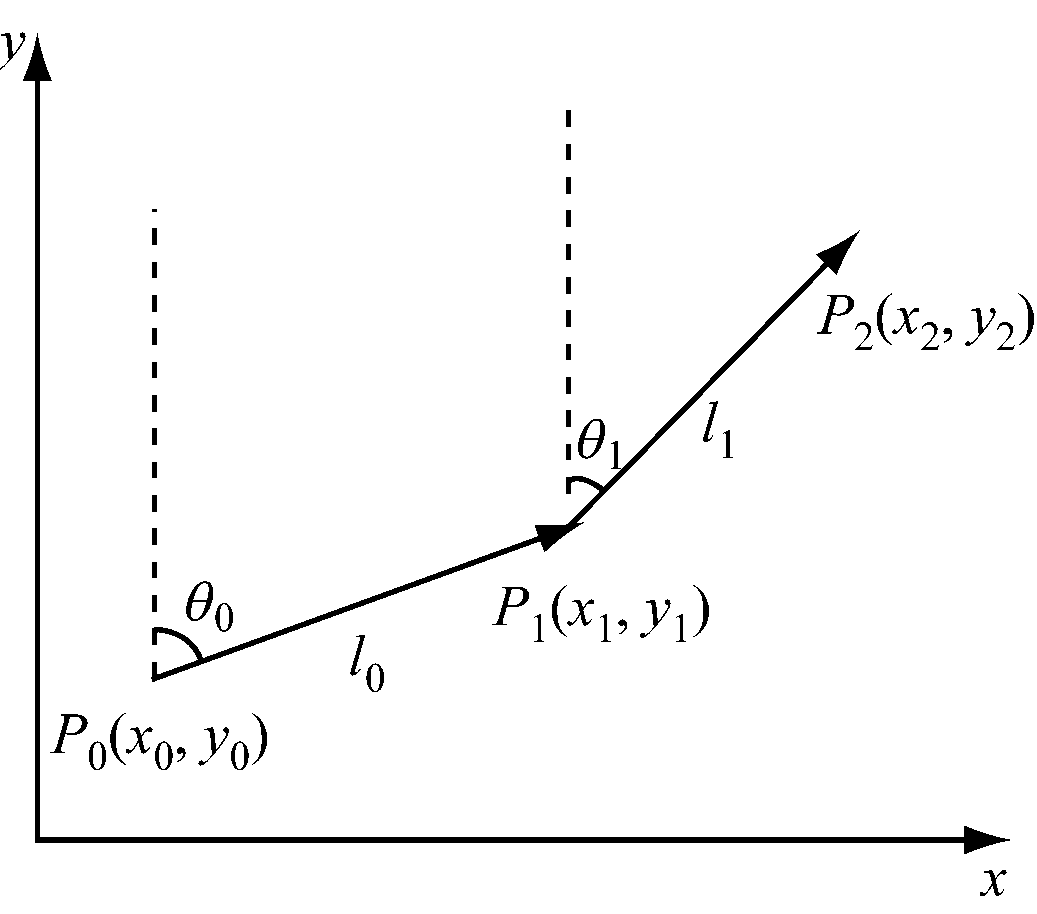
图4 航迹推算原理
假定节点的初始位置点为![]() ,沿航向角θ0移动,移动距离l0后到达位置点
,沿航向角θ0移动,移动距离l0后到达位置点![]() ,则点P0和点P1之间的关系如下:
,则点P0和点P1之间的关系如下:
(3)
节点以航向角θ1移动距离l1后到达位置点![]()
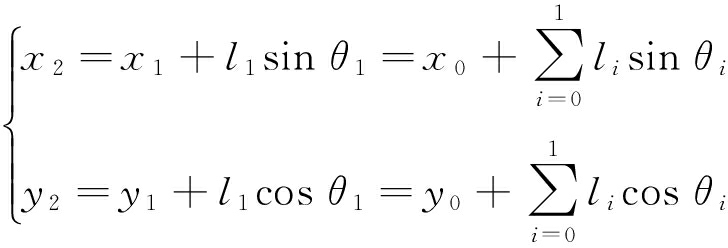
(4)
继续按照节点的航迹进行推算,可得到点Pk的坐标为
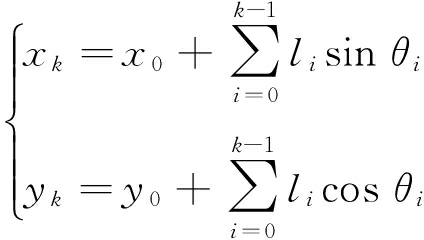
(5)
从航迹推算过程可以看出,航迹推算定位模型的关键是准确获取移动目标的移动距离和航向角。由于普通加速计的精度较低,不能根据传统惯性导航算法通过加速度积分求运动距离[10],所以,行走距离l无法直接测得。为此,本文根据被测人员的行走特征,使用峰值检测法[11]检测行走的步频,再通过估算目标运动中每一步的步幅来计算运动距离。
本节将指纹定位算法和航迹推算技术进行融合,解决初始位置获取困难和航迹推算误差累积的问题,以获得更好的定位效果。
3.1 目标位置解算
混合定位算法流程如图5所示。在定位起始阶段,利用RSSI指纹定位算法求解目标位置,作为目标航迹推算的初始坐标。在定位过程中,锚节点接收目标运动姿态信息和RSSI值,分别利用K近邻和峰值检测方法求解指纹定位结果和航迹推算结果,最后对2种定位结果进行加权融合,得到最终的目标位置。
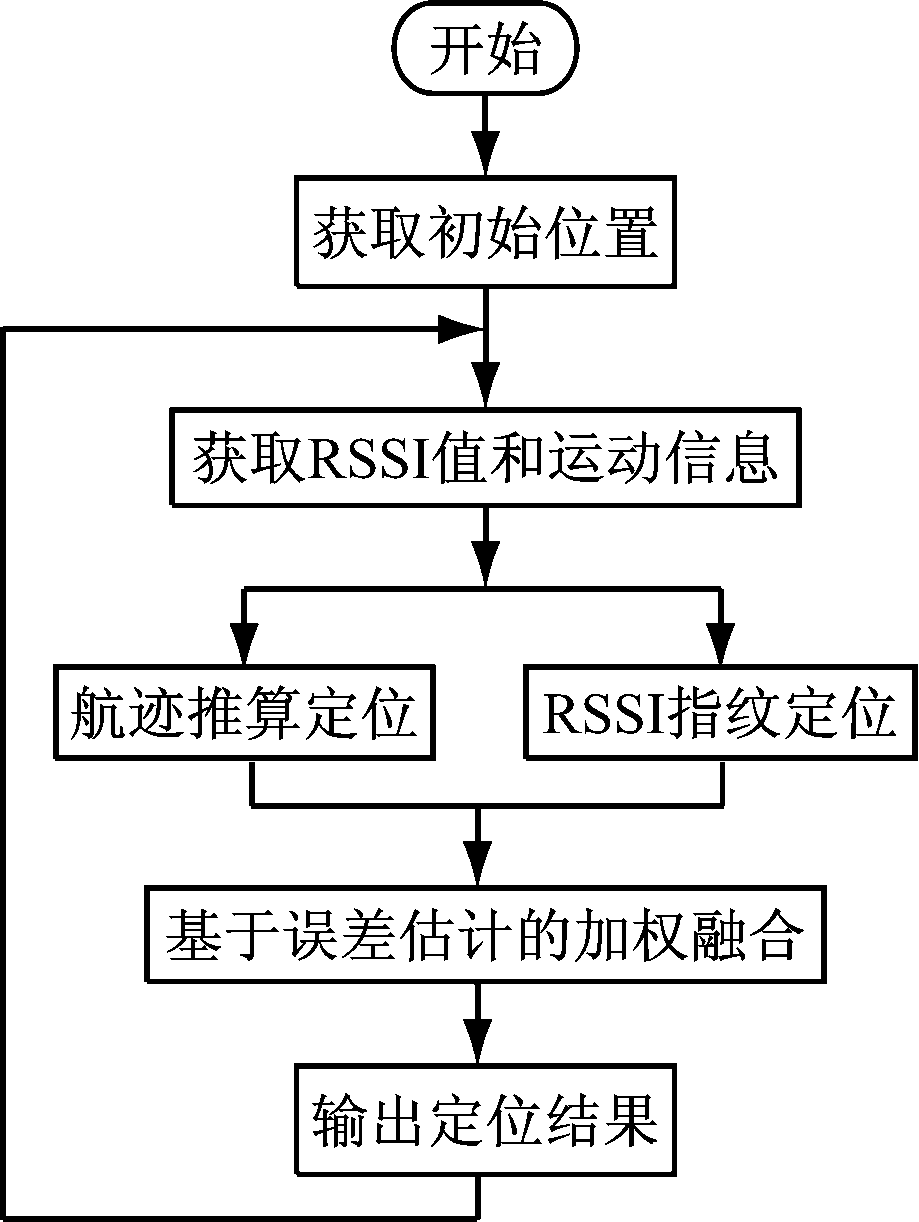
图5 混合定位算法流程
假定目标节点与m个参考节点的RSSI欧氏距离为![]() 。由于目标节点与锚节点之间的欧氏距离越小,指纹定位结果越精确,所以,定义加权因子ω1:
。由于目标节点与锚节点之间的欧氏距离越小,指纹定位结果越精确,所以,定义加权因子ω1:
(6)
另外,注意到目标航迹推算误差会随着时间而累积,因此,定义加权因子ω2:
(7)
式中T为定位时间。
将指纹定位与航迹推算的位置求解结果加权求和,得到最终的定位结果为
(8)
式中:P(t)为t时刻最终定位位置;PRSSI(t)为t时刻RSSI指纹法估计位置;PPDR(t)为t时刻航迹推算估计位置。
3.2 基于RSSI衰减特性的误差控制
基于指纹膜与航迹推算的混合定位算法利用指纹定位降低了航迹推算的累积误差。不过,由于航迹推算的初始位置是由RSSI指纹膜方法求得的,所以,其本身不太精确,且误差是随机、不可控的。考虑到定位环境中的锚节点位置固定不变,本文提出根据接收信号的RSSI值与距离的变化特性,利用锚节点位置更新初始位置。
3次实测得到的RSSI值与距离关系曲线如图6所示。从图6可看出,当目标节点与锚节点相距较近时,RSSI值与目标位置对应关系比较好;随着距离的增大,RSSI值的随机误差不断增大。因此,可以根据RSSI值的衰减特性进行短距离辅助定位。设定信号强度阈值R(本文设R=-55 dB),当锚节点收到的目标节点RSSI值大于阈值时,认为运动目标与锚节点距离较短(如3 m),将当前锚节点的位置作为目标节点的实际位置,并将航迹推算的定位时间T置零。这样既保障了目标节点真实位置与纠正位置之间的距离不超过3 m,有效控制了更新位置的误差范围,同时清空了航迹推算过程中的累积误差,有效提高了定位精度。
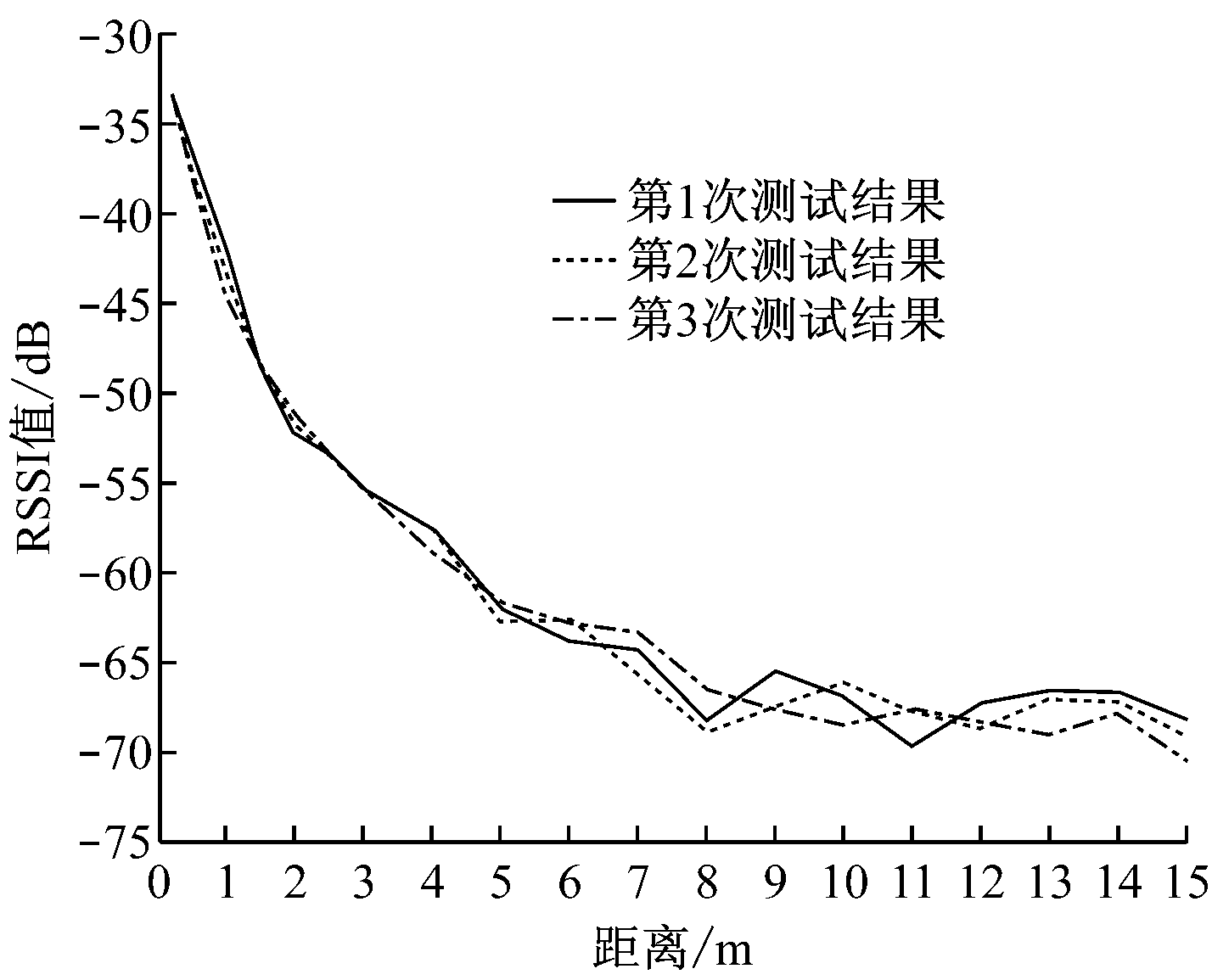
图6 RSSI值与距离关系曲线
基于误差控制的混合定位算法流程如图7所示,具体步骤如下:
(1) 锚节点收到目标节点RSSI信号之后,比较RSSI值与信号强度阈值R的大小关系,判断目标节点是否在锚节点有效范围内,若RSSI>R,则执行步骤(2),否则,执行步骤(3)。
(2) 选定接收到的信号强度最大值,确定距目标节点最近的锚节点,将该锚节点的物理位置坐标设定为目标节点的定位结果。
(3) 分别利用传感数据和信号强度值进行航迹推算定位和指纹定位,得到2种定位结果后进行加权融合,将融合结果设定为目标节点的定位结果。
(4) 利用定位结果更新航迹推算的初始位置。
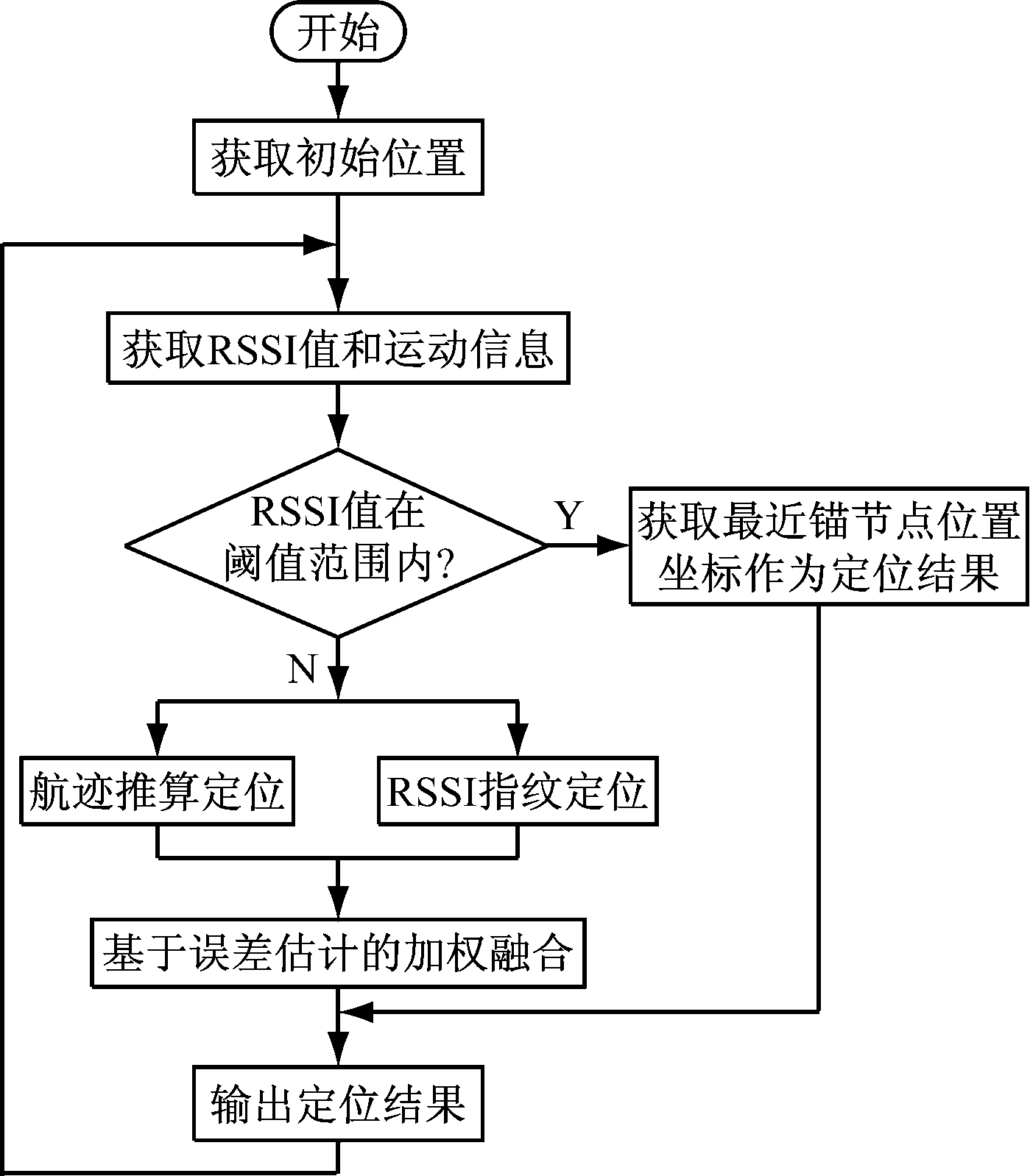
图7 基于误差控制的混合定位算法流程
在某模拟巷道内进行系统测试,模拟巷道为直线结构,宽为2.8 m,选取的测试区域巷道长度为100 m,区域内有2个相距约30 m的硐室,如图8所示。
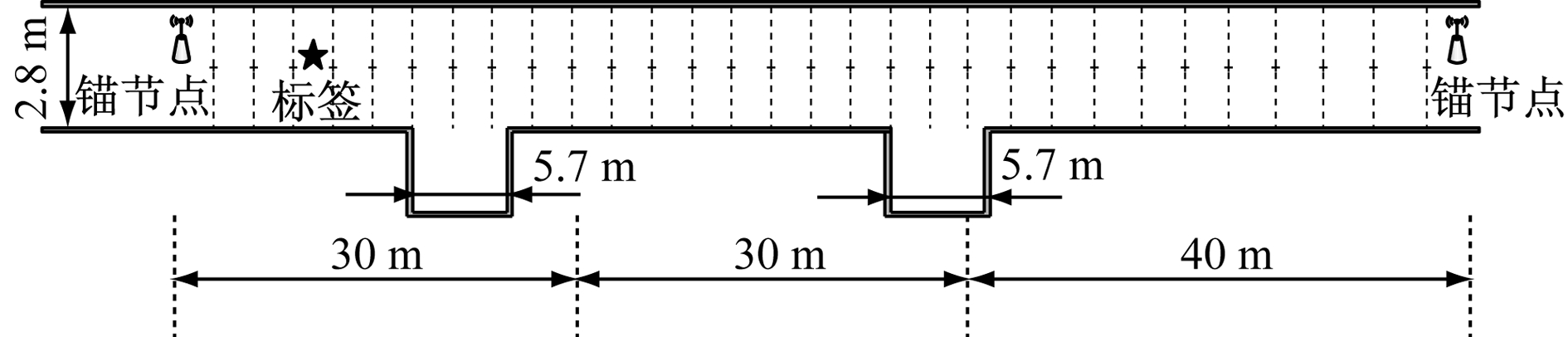
图8 模拟巷道结构
实际测试中,在选取的测试区域两端分别放置1个锚节点。在离线采样阶段,以锚节点1为初始零点位置,每隔3 m进行一次指纹采样,并遍历所需定位区域,将采集到的数据按图3要求建立指纹数据库。在线定位阶段,用户携带定位标签由锚节点1向锚节点2方向移动,行走路程为100 m,历时70 s。移动过程中数据采样周期为150 ms,定位周期为1 500 ms,共进行20组实验。
指纹定位算法、航迹推算法、混合定位算法的定位误差如图9所示。从图9可以看出,指纹定位结果存在一定的位置偏移,其误差在靠近锚节点位置处较小,远离锚节点位置处较大。航迹推算的定位误差随着采样时间的增加而增大,存在误差累积现象。当定位标签靠近锚节点2(即采样时间在70 s左右)时,航迹推算误差大幅度减小,误差累积现象明显改善。
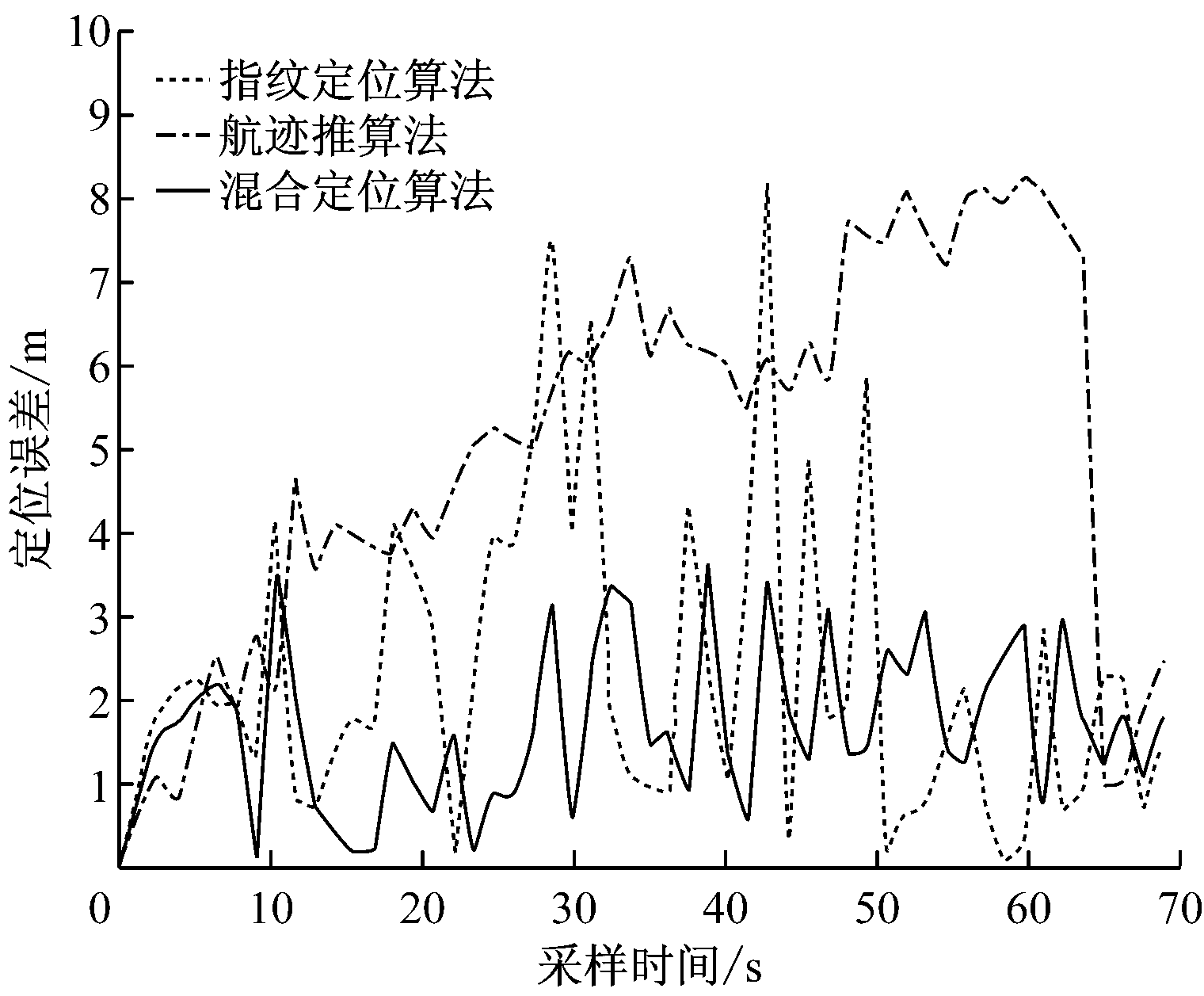
图9 各算法定位误差
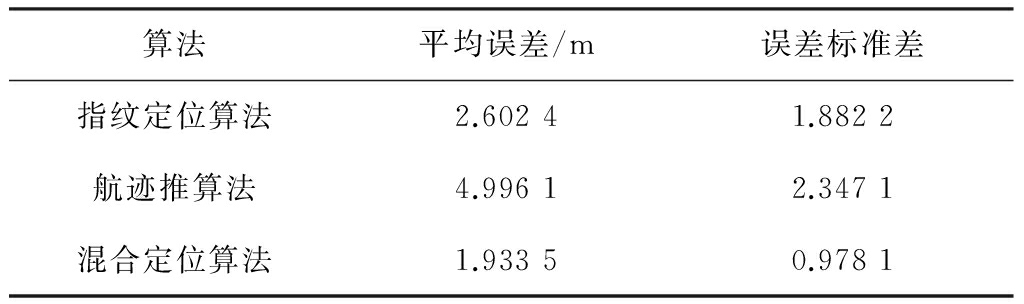
经过20组测试得到的定位平均误差和标准差见表1。从表1可以看出,混合定位算法明显减小了定位误差,提高了系统的定位精度和稳定性。
表1 各算法平均误差和标准差
为了提高煤矿人员安全保障,设计了基于指纹膜与航迹推算的井下人员定位系统。该系统将基于RSSI的指纹定位方法和航迹推算相结合,根据RSSI衰减特性对航迹推算进行误差控制。测试结果表明,该系统解决了航迹推算法初始位置获取困难和误差累积问题,有效提高了定位精度和稳定性。
参考文献:
[1] 姜华,袁晓兵,付耀先,等.无线传感器网络中信道仿真模型的研究[J].计算机仿真,2006,23(11): 129-133.
[2] AFZAL S. A review of localization techniques for wireless sensor networks[J]. Journal of Basic and Applied Scientific Research, 2012, 2(8):7795-7801.
[3] 翟彦蓉,黄欢,张申,等.基于DOA和TDOA的井下定位算法研究[J].工矿自动化,2013,39(11):57-60.
[4] ZHANG Y, BROWN A K, MALIK W Q, et al. High resolution 3-D angle of arrival determination for indoor UWB multipath propagation[J]. IEEE Transaction on Wireless Communications, 2008, 7(8): 3047-3055.
[5] HU Qingsong, DING Yishan, WU Lixin, et al. An enhanced localization method for moving targets in coal mines based on witness nodes[J]. International Journal of Distributed Sensor Networks, 2015, Article ID 876721:1-10.
[6] HASTIE T, TIBSHIRANI R. Discriminant adaptive nearest neighbor classification[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1996, 18(6): 607-616.
[7] 李泽民, 段凤阳, 李赞平. 基于MEMS传感器的数字式航姿系统设计[J]. 传感器与微系统, 2012, 31(6): 94-96.
[8] LEE S,KIM B,KIM H,et al.Inertial sensor-based indoor pedestrian localization with minimum 802.15.4a configuration[J]. IEEE Transactions on Industrial Informatics,2011,7(3):455-466.
[9] 周亮, 付永涛, 李广军. 无线定位与惯性导航结合的室内定位系统设计[J].电子技术应用, 2014, 40(4): 73-76.
[10] 刘勇, 罗宇锋, 王红旗, 等. 一种新型井下人员组合定位系统设计[J]. 工矿自动化, 2014, 40(2): 11-15.
[11] 陈国良, 李飞, 张言哲. 一种基于自适应波峰检测的MEMS计步算法[J].中国惯性技术学报, 2015, 23(3): 315-321.
[12] FANG S H, LIN T N, LEE K C. A novel algorithm for multipath fingerprinting in indoor WLAN environments[J].IEEE Transaction on Wireless Communications,2008,7(9): 3579-3588.
MA Jing1,2, HU Qingsong2,3, SONG Boming1,2, ZHANG Shen2,3
(1.School of Information and Electrical Engineering, China University of Mining and Technology, Xuzhou 221008, China; 2.IoT Perception Mine Research Center, China University of Mining and Technology, Xuzhou 221008,China; 3.The National and Local Joint Engineering Laboratory of Internet Application Technology on Mine, China University of Mining and Technology, Xuzhou 221008,China)
Abstract:In view of problem that RSSI-based fingerprint positioning method is greatly influenced by environment of coal mine tunnel, and localization method based on dead-reckoning is easy to form accumulation of errors, underground personnel positioning system based on fingerprint and dead-reckoning was designed. The system periodically collects location and attitude information, uses KNN and peak detection method to solve result of fingerprint and dead-reckoning, and the target position was obtained by weighted fusion of the two positioning results. The test results demonstrate that the system can obviously improve positioning accuracy and stability, and has strong adaptability to the complex environment of coal mine tunnel.
Key words:underground personnel positioning; fingerprint; dead-reckoning; fusion algorithm
文章编号:1671-251X(2016)05-0019-05
DOI:10.13272/j.issn.1671-251x.2016.05.005
收稿日期:2016-01-20;
修回日期:2016-03-11;责任编辑:胡娴。
基金项目:国家自然科学基金项目(51204177);江苏省自然科学基金项目(BK20151148);中央高校基本科研业务费专项基金项目(2015XKMS097)。
作者简介:马京(1991-),女,山东菏泽人,硕士研究生,主要研究方向为无线传感器网络定位,E-mail:1148587652@qq.com。 通信作者:张申(1955-),男,江苏兴化人,教授,博士研究生导师,主要研究方向为矿山通信与信息化,E-mail:yunnan05@tom.com。
中图分类号:TD655.3
文献标志码:A 网络出版时间:2016-04-29 11:17
马京,胡青松,宋泊明,等.基于指纹膜与航迹推算的井下人员定位系统[J].工矿自动化,2016,42(5):19-23.