图1 手机定位APP结构
经验交流
刘毅
(中国矿业大学(北京) 机电与信息工程学院, 北京 100083)
摘要:针对基于RSSI技术的人员定位系统定位误差较大的问题,提出利用智能手机内置的三轴加速度传感器采集井下工作人员活动振动信号,参照人体运动特点,通过分析处理数据得到人体的步行运动规律,从而实现计步运算。以所经过的无线接入基站为参考点,结合RSSI测距方法实现较为准确的定位。测试结果表明,将RSSI技术和计步测距相结合,可有效提高定位精度。
关键词:人员定位; 三轴加速度传感器; RSSI技术; 计步测距
网络出版地址:http://www.cnki.net/kcms/detail/32.1627.TP.20160405.1134.017.html
煤矿井下人员位置监测系统是煤矿井下安全避险六大系统之一,是矿井安全生产的重要保障和应急救援必要手段。随着技术的发展,各种井下无线通信设备已广泛应用于煤矿,将这些设备接入煤矿井下人员位置监测系统是发展的必然趋势[1-2]。由于煤矿井下不能使用GPS定位,所以常用的定位方法是基于接收信号强度指示(RSSI)的基站定位法。井下为长距离且狭窄的空间环境,一般基站沿巷道线状安装分布,与地面蜂窝覆盖方式不同,所以如要在井下使用基站定位法,需对定位算法进行改进。基于RSSI技术的人员定位系统易受包括天线方向、遮挡物等外界影响,虽然定位精度高于RFID系统,但仍有较大的定位误差。因此,本文提出利用智能手机内置的三轴加速度传感器采集井下工作人员活动振动信号,通过处理3个方向的振动信号,得到工作人员的行走步数,将步数转换为行走距离,以基站为参考点实现精确定位。
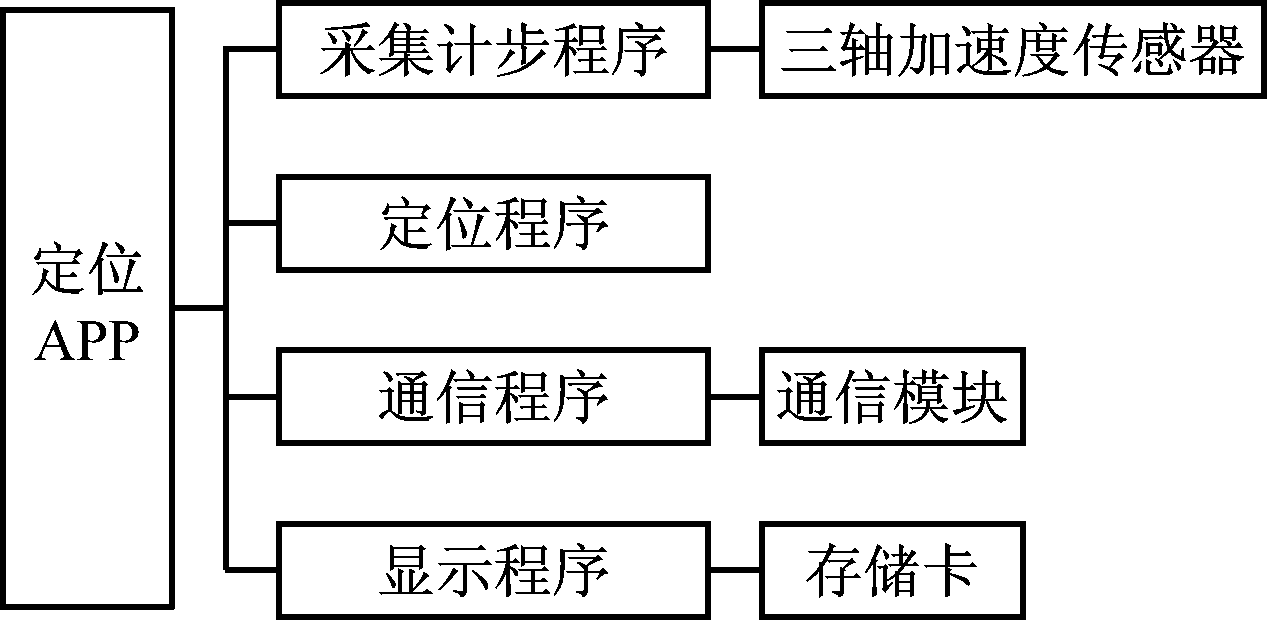
手机定位APP结构如图1所示。
图1 手机定位APP结构
1.1 采集计步程序
采集计步程序负责三轴加速度传感器信号的采集处理。安卓系统智能手机编程时使用SensorEventListener的onSensorChanged事件,将返回SensorEvent对象,包含各传感器的最新数据,通过event.values获得长度为3的三轴加速度传感器数组float[],其中的3个值分别代表X,Y和Z方向的数值。
根据人行走步态的特点定义了如图2(a)所示的3个方向轴,图2(b)为三轴加速度输出数据曲线。分析图2可以看出,垂直方向的轴波形有明显的周期变化,为上向轴,其他轴波形变化幅度和周期性没有上向轴明显,所以以上向轴作为计步依据。由于使用人员可将手机随意放置携带,X,Y和Z轴都可能是上向轴,所以在进行计步判断处理前应先进行轴向判断,先采集一段时间的加速度数据,将3个轴上的所有加速度数据绝对值求和,绝对值最大的轴即为上向轴。根据统计,人行走时左右脚各走一步的频率为0.5~5 Hz[3],可以此为依据滤除高频噪声。计步处理流程如图3所示。
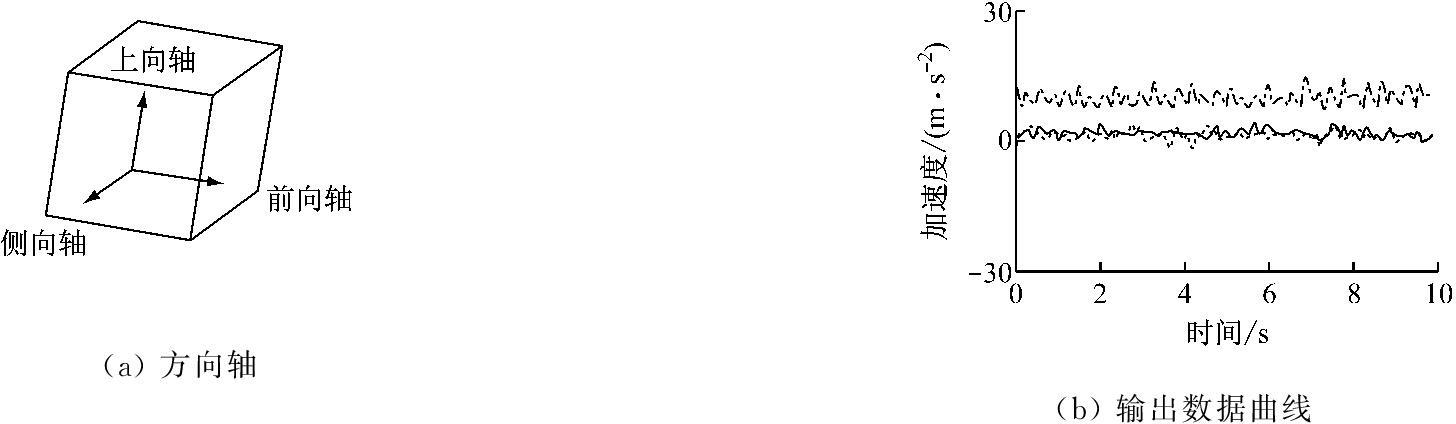
图2 方向轴及三轴加速度数据曲线
图4(a)为没有明确上向轴的情况,各轴均有符合行走规律的数据特征,所以在此情况下运用以上的计步方法,也可实现计步。井下工作人员移动方式除步行外还可以乘坐交通工具,图4(b)为乘坐地铁的三轴加速度数据曲线,可以看出,在垂直轴上的加速度有一定的周期变化,而其他2个轴上的数据曲线没有太大波动。所以计步判断时除了对垂直方向的数据进行处理外,还要判断其他轴的数据规律,防止计步误差。
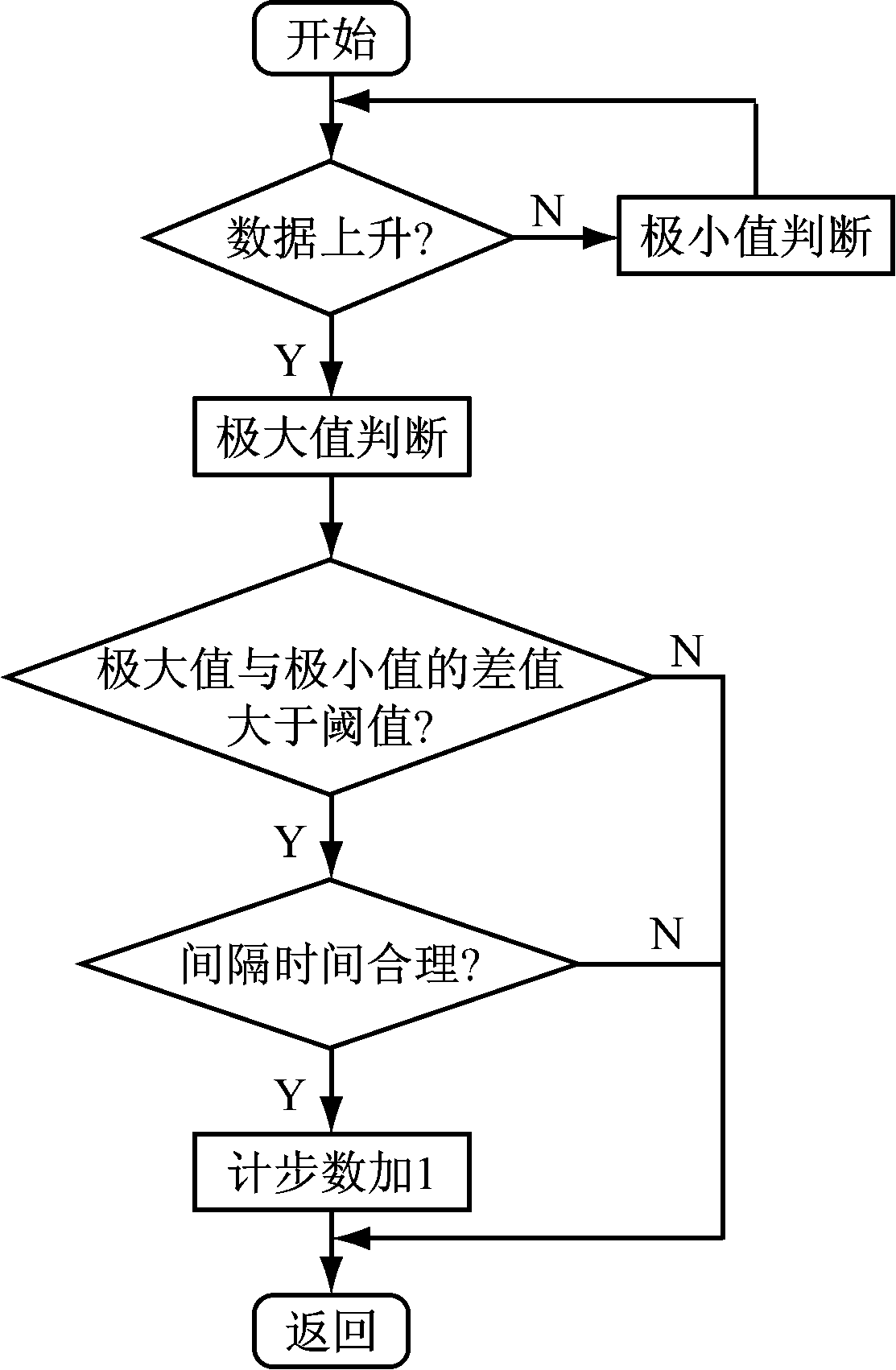
图3 计步处理流程

图4 特殊三轴加速度数据曲线
1.2 通信程序
通信程序负责移动通信装置与井上定位服务器之间的通信。Android系统与服务器主要采用Http和Socket通信方式。http连接采用“请求-响应方式”,即在请求时建立连接通道,当客户端向服务器发送请求后,服务器端才能向客户端返回数据。该方式用于BS模式的服务中。本文采用Socket通信方式和CS程序模式,终端设备与井上服务器采用不基于连接的UDP对等方式通信,定时向系统服务器的固定IP地址及端口发送设备ID及自身位置信息;也可从服务器获得井下其他人员的位置信息。地理信息和位置信息都由设备本身处理得到,不需向服务器获取。采用这种方案的优势在于当设备与服务器通信出现故障时,仍可正常显示地理信息。
1.3 显示程序
显示程序负责读取手机内置矿井地理信息并在屏幕上显示,同时根据定位程序获得的自身位置信息,在地图上相应位置显示。井下地图显示界面如图5所示。
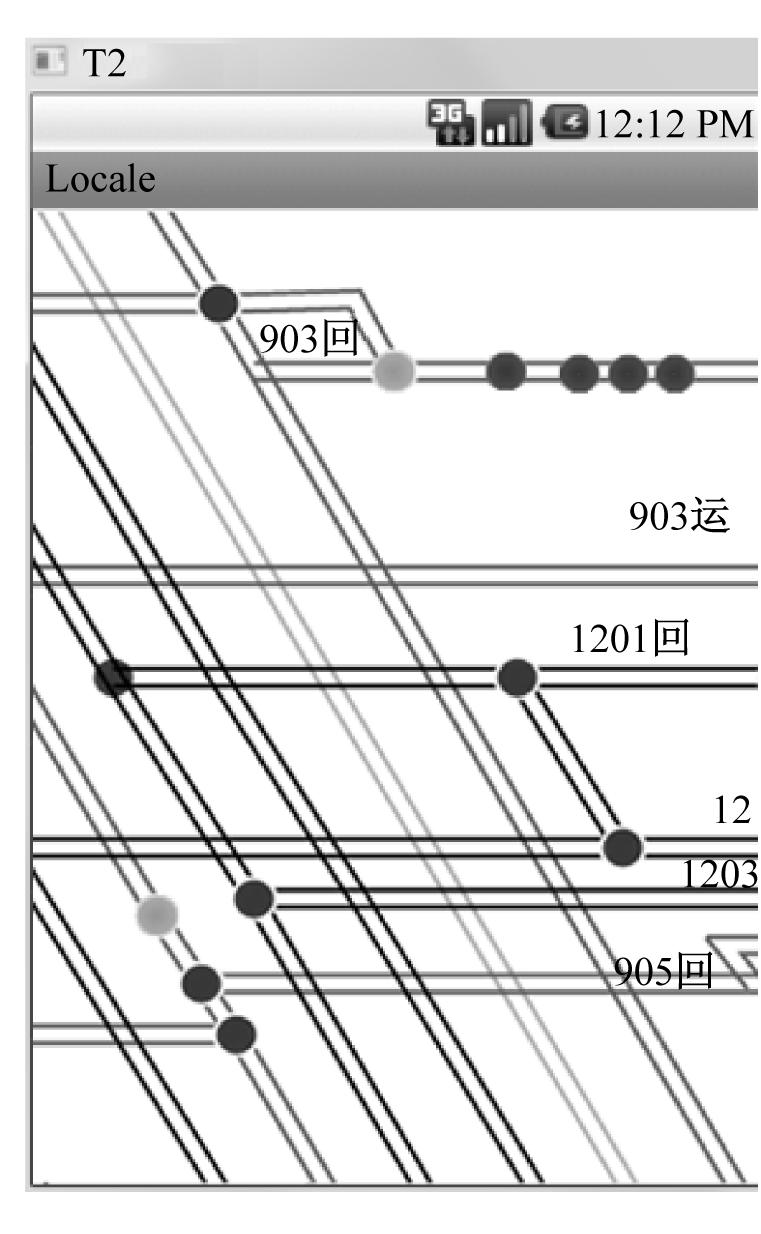
图5 井下地图显示界面
Android系统提供了较为完善的地图相关控件,如用来显示地图的Mapview,控制地图移动、伸缩的MapController等,其他公司也提供了支持离线显示的地图引擎,如Osmdroid,GMapCatcher等。本系统使用UCMap开发组件,用Mapgis将矿用CAD工程图转换为shp格式的GIS地图文件,再使用UCMap地图配置程序将shp格式的地图配置成UCMap特定的地图格式;将生成的文件拷贝到单独的文件夹下,再将此文件夹拷贝至SD卡根目录,即可使用UCMap调取显示地图。在定位程序获取的自身位置坐标在屏幕显示的坐标区域内,则使用绘图函数DrawPolygon在相应位置绘制特定符号,在函数使用时涉及到地图坐标和屏幕坐标的转换。同理,可在地图的相应位置绘制并显示井下其他人员的位置。
1.4 定位程序
定位程序负责采集周边无线通信基站的信号场强,并根据信号场强、基站位置信息,结合佩戴人员的步长步数进行运算,得到定位装置的位置,通过通信程序上传至系统定位服务器。定位流程如图6所示。
定位步骤如下:
(1) 定位终端实时检测三轴加速度传感器数据,并进行计步判断。
(2) 定时检测基站信号场强,并对数据进行滤波处理。
(3) 信号场强达到设定值时,认为定位终端已到达基站所在位置,对计步数清零。
(4) 判断是否到达定位间隔时间,如果间隔时间已到,计算定位终端与基站的距离。设使用者的身高为T,其平均步长为N,则N=1.85(T-1.32)[4];设步数为M,定位装置与计步参考基站的距离为L,则L=MN。
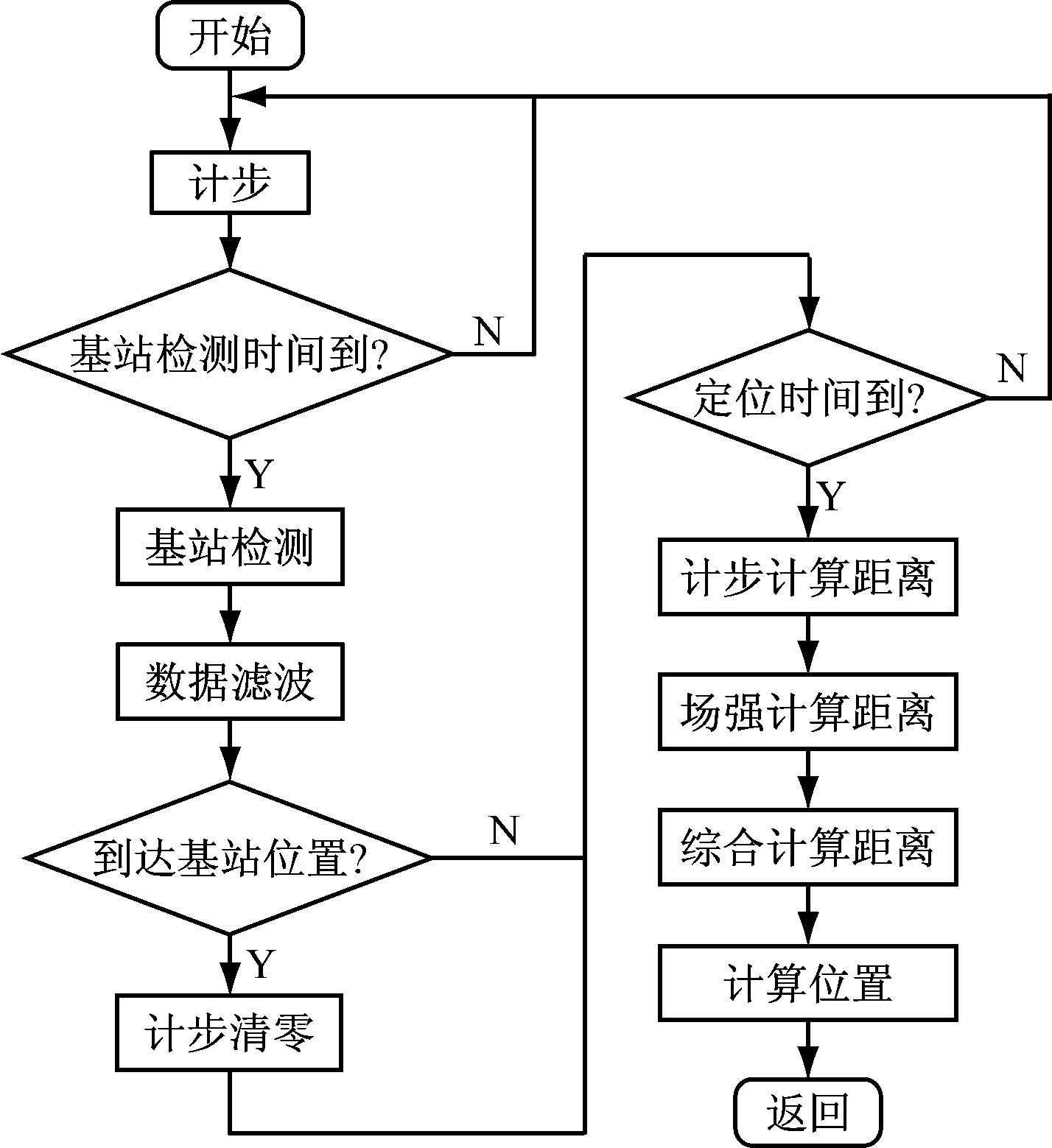
图6 定位流程
(5) 计算终端设备与基站之间的距离z:
(1)
式中:W为基站信号的发射功率;wz为基站信号功率密度;Lz巷道电磁波的总衰减率。
对z进行合理性判断,如果z大于两基站间距离s,则z不参与定位运算。
(6) 设基站位置如图7所示,判断基站B的计步距离d的合理性,如果d不在设定范围内,则d不参与定位运算;若z和d的值都合理,则根据z和d对定位终端到基站B的距离l进行算术平均运算。若定位终端在图7中的位置2,定位终端的接入基站为基站B,则l的计算公式为式(2),基站位置示意如图8(a)所示。若定位终端在图7中的位置3,定位终端的接入基站为基站C,则l的计算公式变为式(3),基站位置示意如图8(b)所示。若z值不合理,则l=d;若d值不合理,则l=z。
(2)
(3)
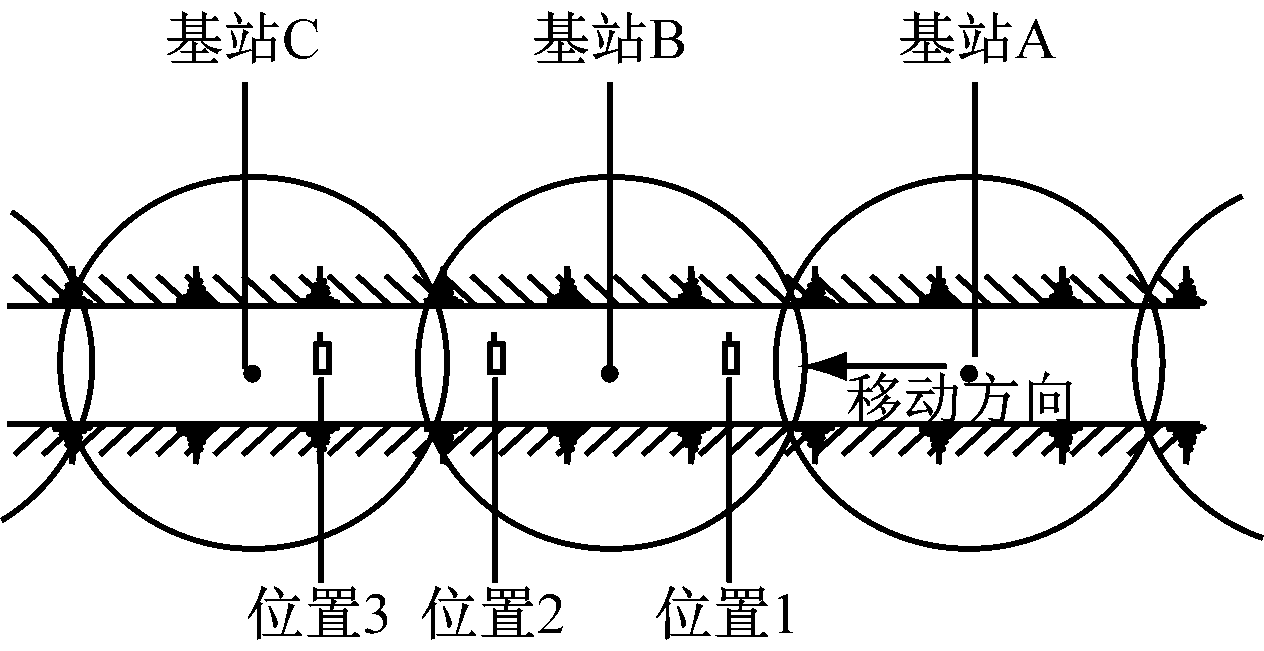
图7 基站位置示意
(7) 将基站B、基站C的坐标(x1,y1),(x2,y2)

图8 不同基站的综合测距
和l代入由点到直线的距离公式、两点式直线方程和线段约束条件组成的方程组,可得到终端设备的当前坐标(x,y):
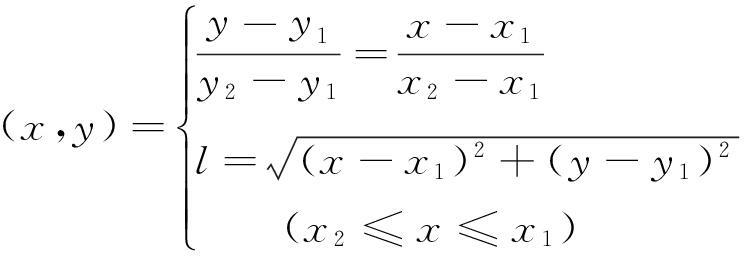
(4)
基于计步的测距方法在短距离测距时较为准确,但用于长距离测距时由于计步误差的累加,会使误差逐渐增大。将RSSI测距的已知位置点作为计步测距的参考点,计步测距只需测量小于两参考点间的距离,有效避免了计步累积误差,从而实现了准确测距。表1为计步算法测试数据,可见运用在较短距离内时,不同的手机放置方向和位置均可得到较为准确的计步值。
表1 计步算法测试数据
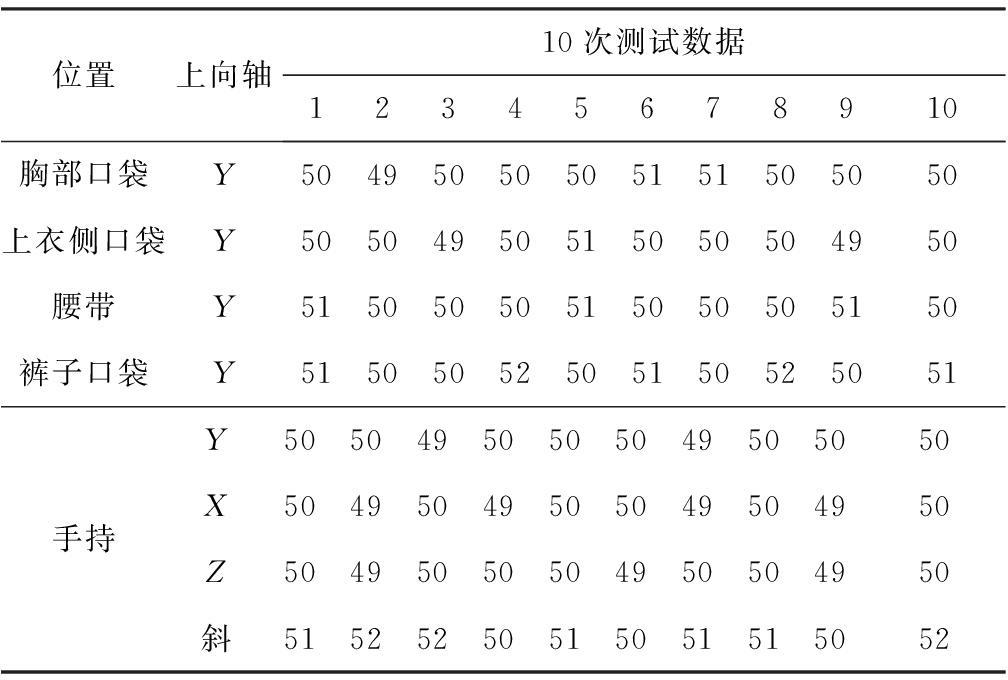
图9为RSSI测距定位与RSSI结合计步测距定位误差比较。从图9可以看出,由于20 m后信号衰减变化幅度不大,而计步测距在此距离内基本准确,在综合计算设备到基站距离时,可将误差减少一半,所以结合计步测距可有效减少RSSI的定位误差。
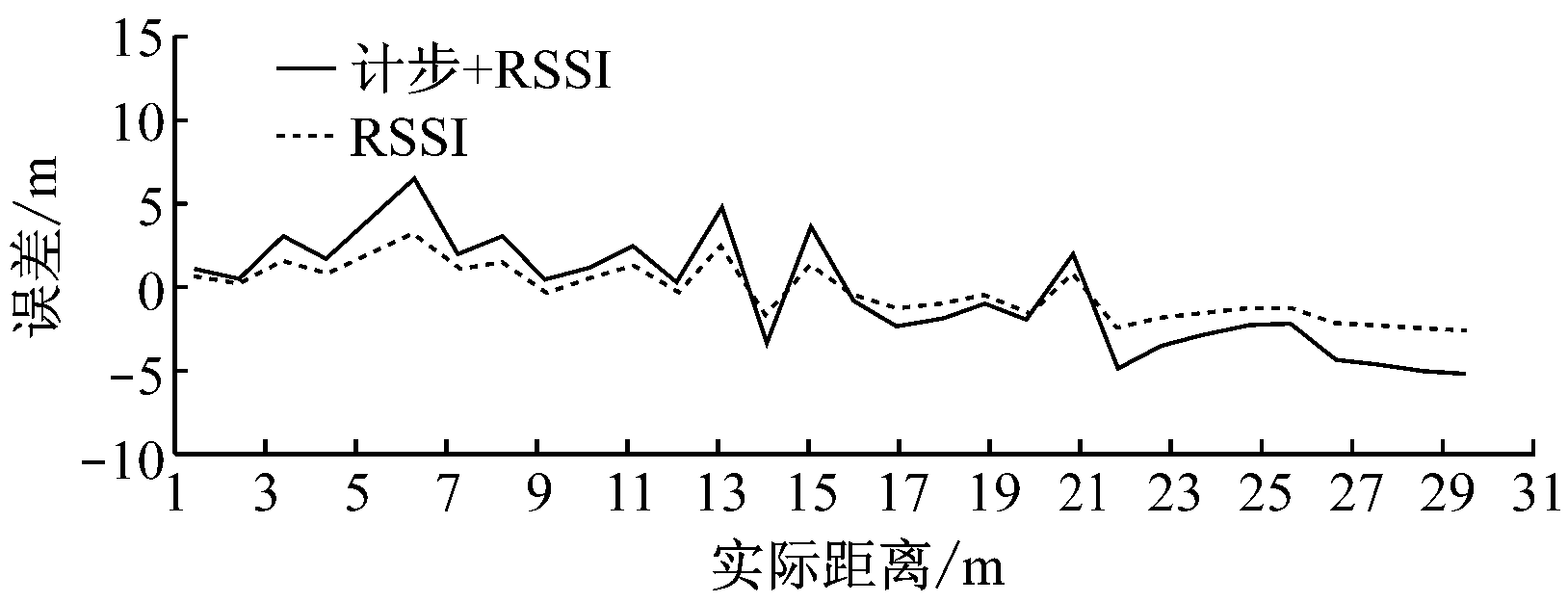
图9 RSSI测距定位与RSSI结合计步测距定位误差比较
基于三向加速度数据的井下移动通信设备定位方法解决了智能手机在煤矿井下无法实现GPS定位,而通过基站RSSI定位误差较大的问题;修正了天线方向、由于人体和其他物体遮挡而引起的定位坐标不稳定和跳变,稳定了坐标数据并提高了定位精度。所设计的设备程序不仅可定位并上报人员位置,还可为井下工作人员提供井下地图显示服务,同时可获取井下其他工作人员的位置信息。
参考文献:
[1] 孙继平.煤矿井下紧急避险与应急救援技术[J].工矿自动化,2014,40(1):1-4.
[2] 孙继平.煤矿井下安全避险“六大系统”的作用和配置方案[J].工矿自动化,2010,36(11):1-4.
[3] 苏丽娜,董金明,赵琦.基于加速度传感器的计步器系统[J].测控技术,2007,26(增刊1):163-165.
[4] 姚力,高以群,王辉.利用步长分析身高的实验研究[J]. 刑事技术,1999(1):17-19.
[5] 汪玉凤,李凯,张月玲.基于加速度传感器的井下电机车实时定位系统[J].计算机系统应用,2014(11):251-255.
LIU Yi
(School of Mechanical Electronic and Information Engineering, China University of Mining and Technology(Beijing), Beijing 100083, China)
Abstract:In view of the problem of big position error of personnel positioning system based on RSSI technology, the paper proposed to use triaxial acceleration sensor built-in smart phone to collect active vibration signal, and get walking motion law of the human through data analysis with reference to body movement, so as to achieve pedometer operations. The passed wireless access point was taken as a reference to achieve accurate positioning combined with RSSI ranging method. The test results show that the combination of RSSI ranging technology and pedometer ranging can effectively improve positioning accuracy.
Key words:personnel positioning; three axis acceleration sensor; RSSI technology; pedometer ranging
作者简介:刘毅(1973-),男,山西临汾人,讲师,从事煤矿图像监控、井下人员定位理论与技术研究工作,E-mail:liu_y@sina.com。
基金项目:国家自然科学基金资助重点项目(51134024)。
收稿日期:2015-11-26;修回日期:2016-02-19;责任编辑:胡娴。
中图分类号:TD655.3
文献标志码:A 网络出版时间:2016-04-05 11:34
文章编号:1671-251X(2016)04-0070-04
DOI:10.13272/j.issn.1671-251x.2016.04.017
刘毅.基于三向加速度数据的井下移动通信设备定位[J].工矿自动化,2016,42(4):70-73.