(a)三相SRM绕组(b)四相SRM绕组
刘成尧1,2, 潘再平2
(1.浙江工业职业技术学院 电气电子工程学院, 浙江 绍兴 312000;
2.浙江大学 电气工程学院, 浙江 杭州 310027)
摘要:以4/6极三相开关磁阻电动机和6/8极四相开关磁阻电动机为研究对象,分析了三相、四相开关磁阻电动机的绕组布置结构和相间连接方式对两相同步励磁下的磁场以及转矩脉动和平均转矩的影响,给出了8种典型组合模式下两相同步励磁工作的电动机转矩特性,指出三相反向绕组、各相独立连接模式,三相正向绕组、相间星形连接模式,四相反向绕组、各相独立连接模式和四相反向绕组、相间星形连接模式下的两相同步励磁能够降低转矩脉动和提高平均转矩。
关键词:开关磁阻电动机; 两相同步励磁; 定子绕组; 平均转矩; 转矩脉动
网络出版地址:http://www.cnki.net/kcms/detail/32.1627.TP.20160405.1134.016.html
开关磁阻电动机(Switched Reluctance Motor,SRM)具有结构简单、工作可靠、调速性能优越等特点,但由于是双凸极结构,通常工作于磁饱和状态以及采用开关形式供电,导致换相期间电动机转矩脉动大,工作噪声大。Ahn等[1]首先提出了SRM两相同步励磁(Two-Phase Excitation,TPE)的控制方案,利用两相自感与互感的合理叠加实现对转矩脉动的抑制和平均转矩的提高[2],并基于简化的线性SRM模型,通过理论与实验方法解释了TPE能降低转矩脉动的原因;Edrington等[3]利用实验方法研究了TPE的动态建模;郭伟等 [4-5]建立了TPE模式磁链和转矩角模型;童怀[6]提出了TPE等效网络静态模型;高洁等[7-8]研究了TPE模式的功率拓扑结构。这些研究大大促进了TPE技术的发展,但目前关于电动机绕组模式对TPE工作特性影响的研究还较少[9]。本文以4/6极三相SRM和6/8极四相SRM为研究对象,系统地分析了三相、四相SRM的绕组布置结构、相间连接方式对TPE工作特性的影响。
SRM转子无绕组,定子绕组方式分为正向绕组和反向绕组,定子的磁极用N和S表示,按顺时针方向表述定子的磁极分布,正向绕组通电后产生的磁极为NS或SN,反相绕组通电后产生的磁极为NN或SS。根据相间的连接方式,可分为各相独立连接和相间星形连接。
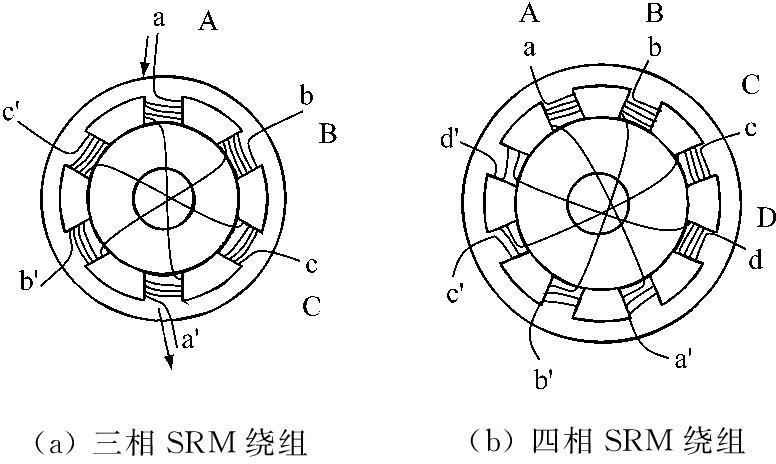
三相SRM绕组结构如图1(a)所示,从3个定子引出A,B,C三相,其中a,a′,b,b′,c,c′分别表示电动机定子端的绕组抽头,a和a′、b和b′、c和c′对应接入A,B,C相电源,A相电流从a流入、a′流出,可表示为电流沿aa′方向。四相SRM绕组结构如图1(b)所示,从4个定子引出A,B,C,D四相,其中a,a′,b,b′,c,c′,d,d′分别表示电动机定子端的绕组抽头,a和a′、b和b′、c和c′、d和d′对应接入A,B,C,D相电源。
图1 三相、四相SRM绕组结构
(1) 三相正向绕组、各相独立连接模式。由于各相独立连接,两相同时励磁的组合较多,设定固定电流流向以便于研究电动机磁场情况:① 电流沿aa′,b′b,cc′方向,可构成NSNSNS磁极分布,如图2(a)所示,极间磁极分布一致,且互感强度大于自感,转矩脉动较小,平均转矩较大;② 电流沿aa′,bb′,cc′方向,可构成NNNSSS磁极分布,如图2(b)所示,极间磁极分布不一致,存在NN(SS),NS不同的磁极分布,转矩脉动增大[6]。
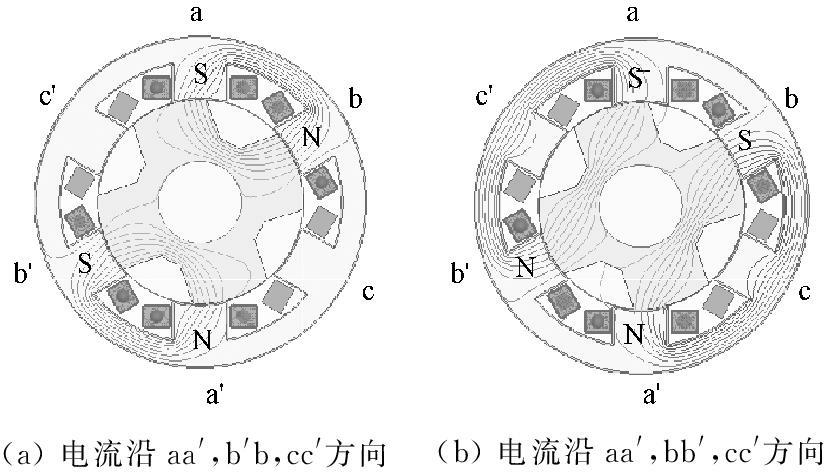
图2 三相正向绕组、各相独立连接模式的磁极分布
(2) 三相反向绕组、各相独立连接模式。在各相独立连接情况下,TPE的电流流向对SRM磁场影响极大,本文设定2种电流流向:① 电流沿aa′,bb′,cc′方向,可构成SSSSSS磁极分布,如图3(a)所示,极间互感较弱,平均转矩小;② 电流沿aa′,b′b,cc′方向,可构成NSNSNS磁极分布,如图3(b)所示,极间磁极分布一致,互感较强,转矩脉动抑制较好,平均转矩较大。
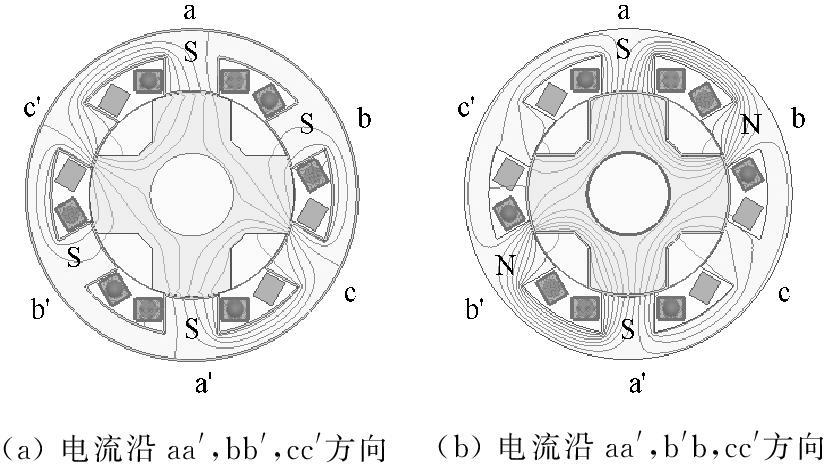
图3 三相反向绕组、各相独立连接模式的磁极分布
(3) 四相正向绕组、各相独立连接模式。参考三相正向绕组、各相独立连接模式的电流流向设定规则,设定四相正向绕组、各相独立连接模式的2种电流流向:① 电流沿aa′,b′b,cc′,d′d方向,可构成NSNSSNSN磁极分布,如图4(a)所示,极间磁极分布不一致,转矩脉动较大;② 电流沿aa′,bb′,cc′,dd′方向,可构成NNNNSSSS磁极分布,如图4(b)所示,极间磁极分布不一致,转矩脉动较大。

图4 四相正向绕组、各相独立连接模式的磁极分布
(4) 四相反向绕组、各相独立连接模式。四相反向绕组与三相反向绕组类似,由于多了一相,可以通过合适的电流流向实现定子磁极的规则分布。按照aa′,b′b,cc′,d′d的电流流向,可构成NSNSNSNS磁极分布,如图5所示,极间磁极为NS,极间互感较强,转矩脉动较小,平均转矩较大。
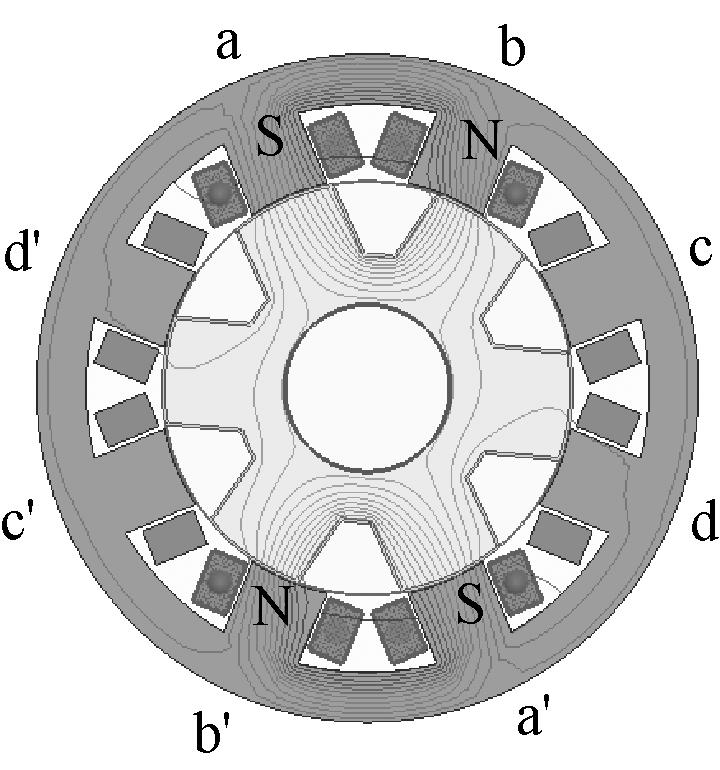
图5 四相反向绕组、各相独立连接模式的磁极分布
(5) 三相正向绕组、相间星形连接模式。将电动机定子绕组的a′,b,c′抽头短接,a,b′,c抽头外接三相电源,任意2个抽头导通即可实现TPE工作。该模式下相电流导通顺序及电流流向为aa′bb′,cc′bb′,cc′a′a,b′ba′a,b′bc′c,aa′c′c,可构成NSNSNS磁极分布,如图6所示,极间磁极分布一致,互感较强,转矩脉动较小,平均转矩显著变大。
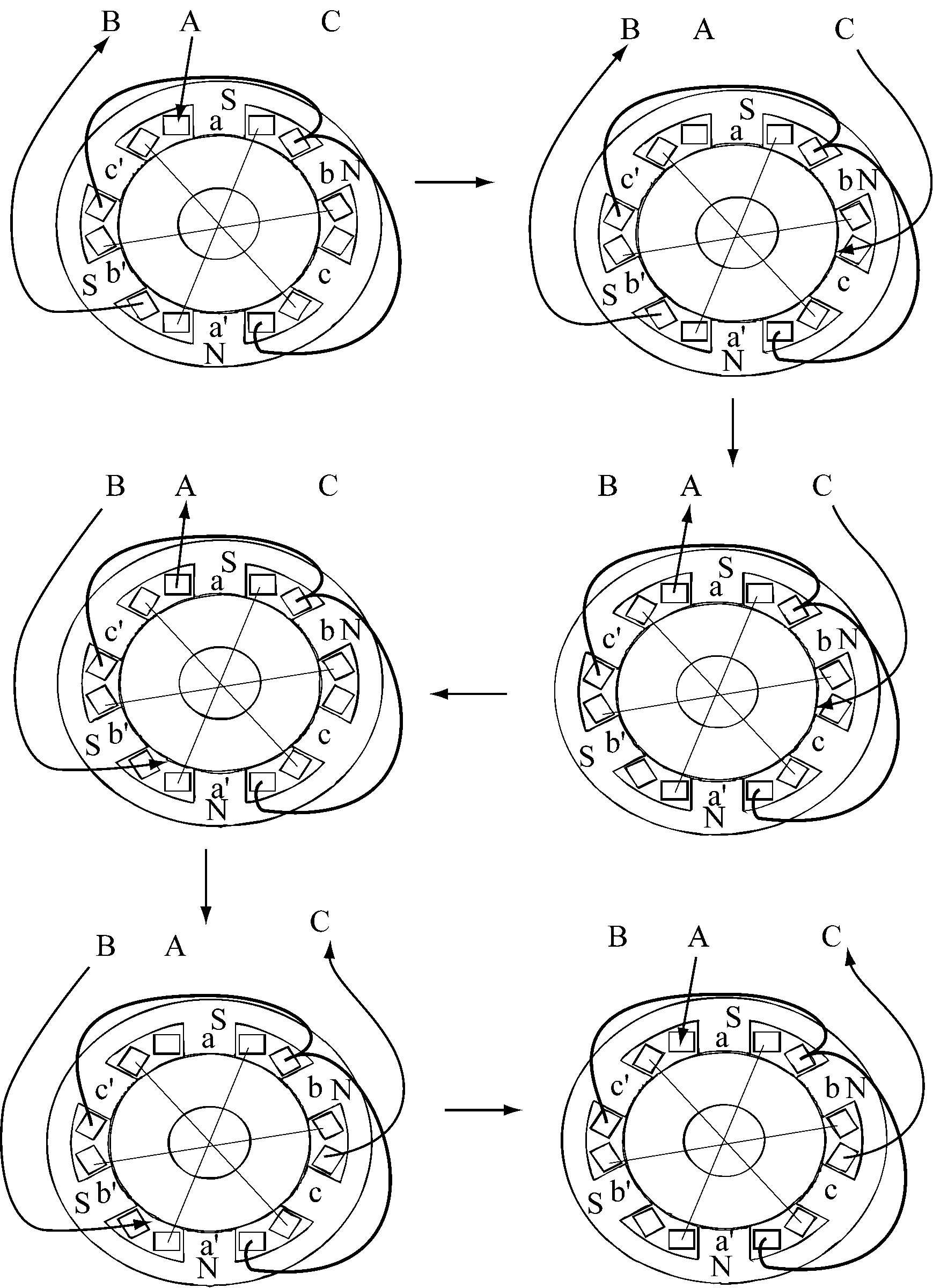
图6 三相正向绕组、相间星形连接模式的
相电流导通顺序及电流流向
(6) 三相反向绕组、相间星形连接模式。该模式下需要保持相邻两相电流反向以获得极间磁极的一致性分布,采用与三相正向绕组、相间星形连接模式同样的连接方式、相电流导通顺序及电流流向,可构成NSNSNS磁极分布。由于反向绕组的自感强度大于互感,所以该模式下的转矩脉动较三相正向绕组、相间星形连接模式下的转矩脉动大,平均转矩较小。
(7) 四相正向绕组、相间星形连接模式。将定子绕组的a′,b′,c′,d′抽头短接,a,b,c,d抽头外接四相电源,任意2个抽头导通即可实现TPE工作。该模式下相电流导通顺序及电流流向为aa′b′b,cc′b′b,cc′d′d,aa′d′d,可构成SNSNNSNS磁极分布,如图7所示,极间磁极分布不一致,互感不一致,导致转矩脉动较大。
(8) 四相反向绕组、相间星形连接模式。该模式下需要保持相邻两相电流反向以获得极间磁极的一致性分布,采用与四相正向绕组、相间星形连接模式同样的连接方式、相电流导通顺序及电流流向,可构成NSNSNSNS磁极分布,如图8所示,极间磁极分布一致,互感较强,转矩脉动较小,平均转矩显著变大。
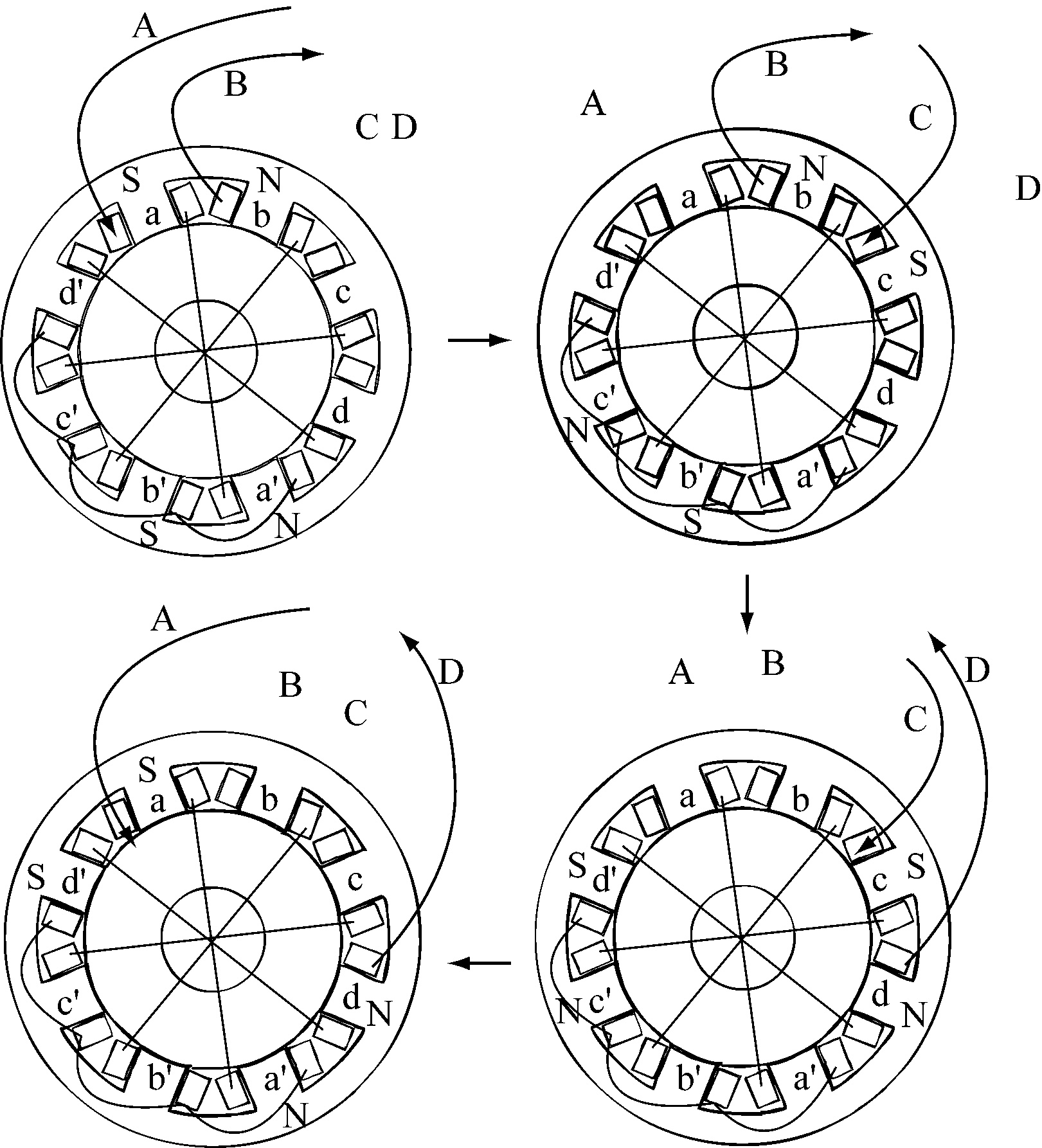
图7 四相正向绕组、相间星形连接模式的
相电流导通顺序及电流流向
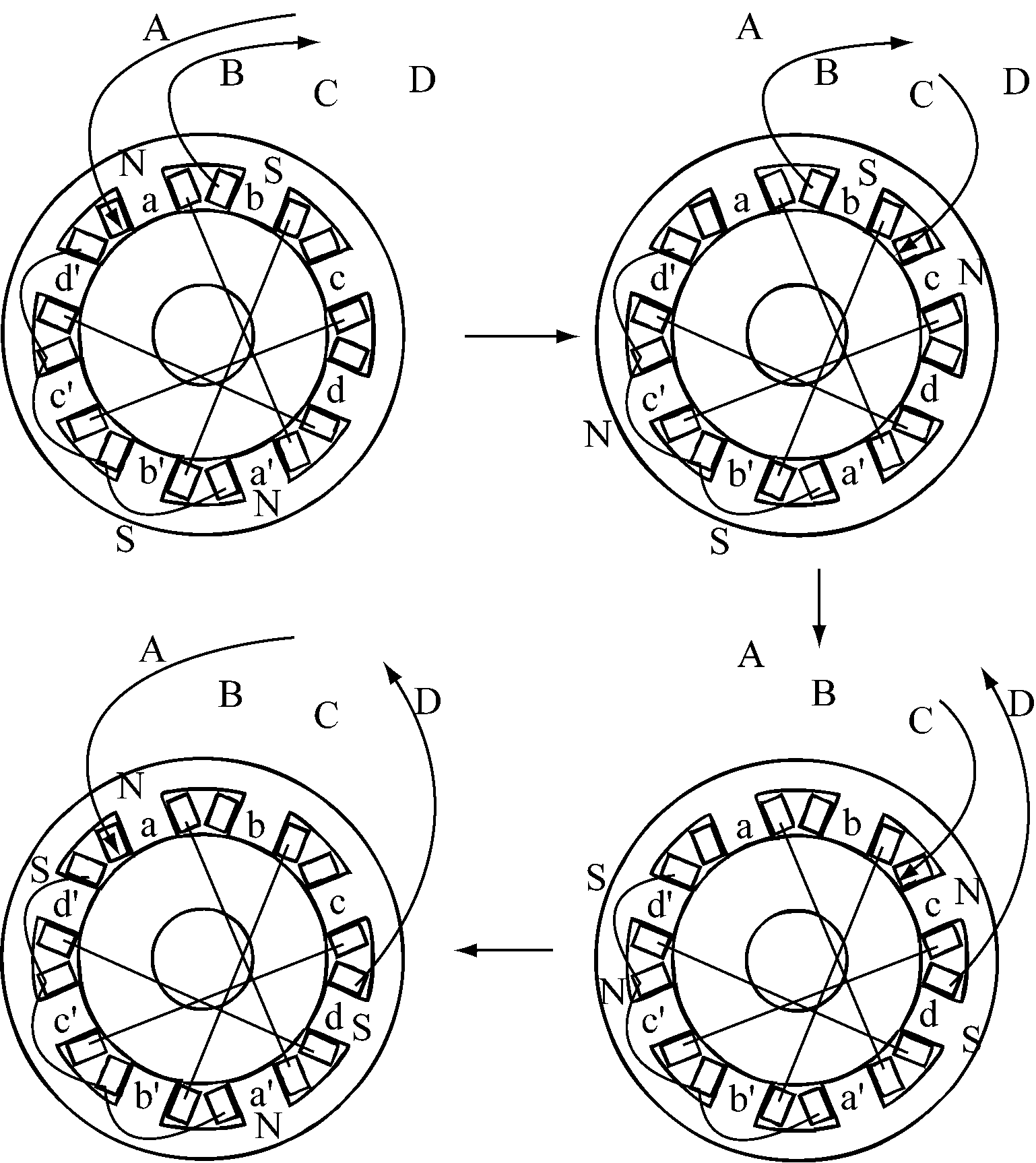
图8 四相反向绕组、相间星形连接模式的
相电流导通顺序及电流流向
三相、四相SRM通过合适的绕组形式和相间连接方式能够实现TPE有效工作,但由于绕组形式和相间连接方式的不同,导致TPE的转矩脉动和平均转矩不同。其中,三相反向绕组、各相独立连接模式,三相正向绕组、相间星形连接模式,四相反向绕组、各相独立连接模式和四相反向绕组、相间星形连接模式的TPE可以获得较好的转矩脉动抑制和较大的平均转矩,为进一步研究基于TPE的SRM系统设计提供了参考。
参考文献:
[1] AHN J W,OH S G,MOON J W,et al.A three-phase switched reluctance motor with two-phase excitation[J].IEEE Transactions on Industry Applications,1999,35(5):1067-1075.
[2] 詹琼华,吴莹,郭伟.开关磁阻电机绕组连接方式的研究[J].电机与控制学报,2002,6(2):93-95.
[3] EDRINGTON C S,KRISHNAMURTHY M,FAHIMI B.Bipolar switched reluctance machines: a novel solution for automotive applications[J].IEEE Transactions on Vehicular Technology,2005,54(3):795-808.
[4] 郭伟,詹琼华,丘亦慧.一种新型两相励磁开关磁阻电机驱动系统的静态特性[J].中国电机工程学报,2002,22(12):92-97.
[5] 郭伟,赵争鸣,詹琼华.磁网络模型在两相激磁开关磁阻电机中的应用[J].电机与控制学报,2006,10(2):154-159.
[6] 童怀.新型两相励磁开关磁阻电机驱动系统的稳态特性分析[J].中国电机工程学报,2005,25(10):149-153.
[7] 高洁,孙鹤旭,何林,等.四相SRM驱动系统两相励磁功率因数校正研究[J].电机与控制学报,2011,15(8):34-38.
[8] 高洁,孙鹤旭,米彦青,等.计及互感的开关磁阻电机单双相励磁静态性能分析[J].电机与控制学报,2012,16(11):45-51.
[9] 徐鹏鹏,陆凤扬,何静.开关磁阻电动机电磁干扰抑制方法研究[J].工矿自动化,2013,39(11):65-70.
LIU Chengyao1,2, PAN Zaiping2
(1.College of Electrical and Electric Engineering, Zhejiang Industry Polytechnic College, Shaoxing
312000, China; 2.College of Electrical Engineering, Zhejiang University, Hangzhou 310027, China)
Abstract:The paper took 4/6 poles three-phase switched reluctance motor and 6/8 poles four-phase switched reluctance motor as study objects, analyzed influence of winding structure and phase connection way of three-phase and four-phase switched reluctance motor on magnetic field, torque ripple and average torque under two-phase excitation, gave motor torque characteristics of two-phase excitation under eight typical combination modes, and pointed that two-phase excitation under modes of three-phase reverse winding with independent connection of each phase, three-phase positive winding with star connection of each phase, four-phase reverse winding with independent connection of each phase and four-phase reverse winding with star connection of each phase could reduce torque ripple and improve average torque.
Key words:switched reluctance motor; two-phase excitation; stator winding; average torque; torque ripple
中图分类号:TD614
文献标志码:A 网络出版时间:2016-04-05 11:34
文章编号:1671-251X(2016)04-0066-04
DOI:10.13272/j.issn.1671-251x.2016.04.016
刘成尧,潘再平.开关磁阻电动机两相同步励磁与定子绕组模式研究[J].工矿自动化,2016,42(4):66-69.