薛彦波
(中煤科工集团重庆研究院有限公司, 重庆 400039)
摘要:针对采用液体黏性软启动装置的多机驱动带式输送机在启动过程中各电动机功率不平衡的问题,提出了一种多机驱动带式输送机功率平衡控制方法:利用电流预测算法预测电动机电流,以提高控制响应速度;根据各电动机之间的预测电流偏差,通过比例微分控制算法调节液体黏性软启动装置所配用的控制泵给定频率,进而改变电动机电流,使各电动机电流差控制在一定范围内。现场应用结果表明,在带式输送机空载和重载启动时,该方法均能对电动机过大电流进行抑制调节,实现带式输送机平稳启动和功率平衡。
关键词:带式输送机; 多机驱动; 液体黏性软启动装置; 功率平衡; 电流预测; 比例微分控制
煤矿井下带式输送机采用多电动机驱动时,由于相同规格的驱动电动机其实际机械特性存在差异,各驱动滚筒的实际直径存在偏差,再加上安装时的误差率、输送带伸长率及其他环境因素的影响,会造成各电动机输出功率不平衡,即电动机负荷分配不均,严重危害带式输送机的安全运行,影响煤矿安全生产[1]。
调节带式输送机功率平衡的常用驱动装置有变频调速驱动装置、CST驱动装置、调速型液力偶合器驱动装置和液体黏性软启动装置等[2],其中液体黏性软启动装置成本低、易于维护、传递效率高,满足煤矿对带式输送机驱动装置高性价比的要求。针对采用液体黏性软启动装置的多机驱动带式输送机,本文提出了一种将电流预测算法和比例微分(Proportional Derivative, PD)控制算法相结合的功率平衡控制方法,根据各电动机之间的预测电流偏差,对液体黏性软启动装置所配用的控制泵给定频率进行PD控制,进而动态调节各电动机电流,实现多电动机驱动的带式输送机在启动过程中的功率平衡。
液体黏性软启动装置根据牛顿内摩擦定律,利用液体的黏性,通过油膜的剪切作用来传递动力,其主要由主、从动摩擦片,控制油缸,弹簧,壳体及密封件等组成。当主动轴带动主动摩擦片旋转时,摩擦片之间的黏性流体形成油膜带动从动摩擦片旋转[3]。由油膜剪切理论可知,液体黏性软启动装置的输出转矩为
(1)
式中:μ为油膜的动力黏度,Pa·s;n为油膜数;h为油膜厚度,m;ω1为主动摩擦片的角速度,rad/s;ω2为从动摩擦片的角速度,rad/s;R1为主、从动摩擦片的接触面内径,m;R2为主、从动摩擦片的接触面外径,m;i为主、从动摩擦片的角速度比,![]() 。
。
由式(1)可知,对于确定的液体黏性软启动装置,μ,n,R1,R2均为定值,液体黏性软启动装置的输出转矩与主、从动摩擦片的角速度差呈正比,与油膜厚度呈反比。因此,可通过控制油缸内油压大小来调节主、从动摩擦片之间的油膜厚度,进而改变从动轴输出转矩和转速的大小,实现带式输送机的平稳启动及速度调节[4]。
功率平衡控制原理如图1所示。控制器接收到上位机发送的启动命令后,输出模拟量信号作为变频器的给定频率输入信号,同时变频器将其输出频率反馈至控制器。变频器驱动控制泵给定频率逐步增加,而控制泵油压与其频率呈正比,因此控制泵油压同步增加,同时将油压信号反馈至控制器。液体黏性软启动装置中主、从动摩擦片之间的油膜厚度与控制泵油压呈反比,随着控制泵油压的增大,油膜厚度减小,液体黏性软启动装置输出转矩变大,电动机输出功率增加,电动机输出转矩通过液体黏性软启动装置传递到驱动滚筒,从而拖动带式输送机启动运行。
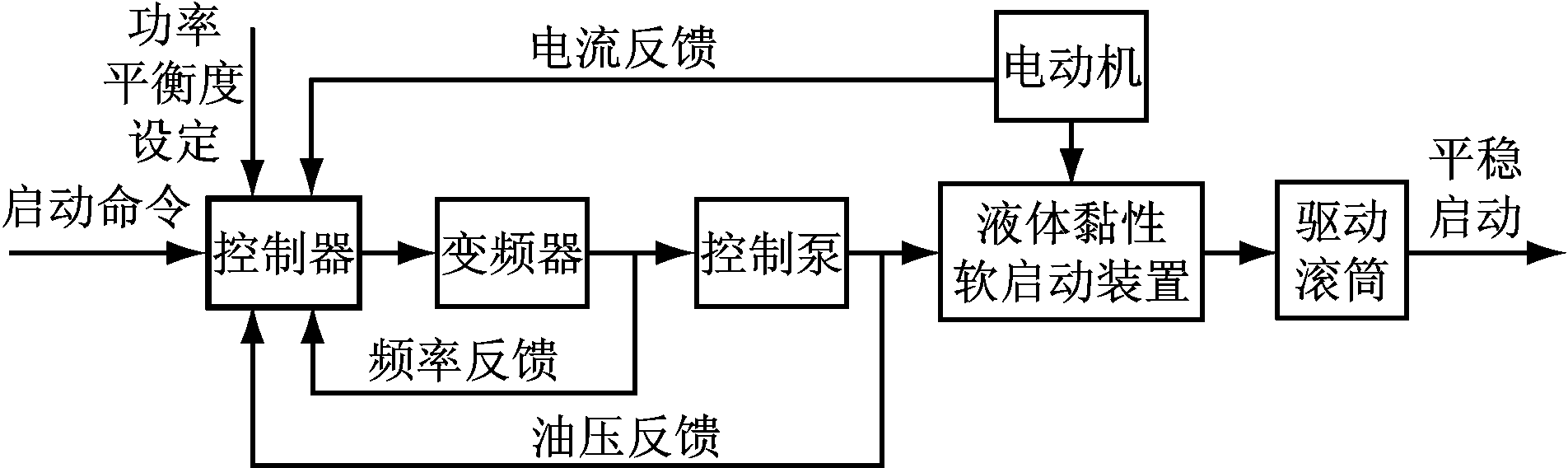
图1 功率平衡控制原理
由于电动机输出功率与电动机电流呈正比,可将各电动机电流作为功率平衡调节的依据。电动机的功率平衡度通过各电动机间的电流差来体现。控制器预先设定功率平衡度阈值,即各电动机电流差的阈值。带式输送机在启动过程中,电动机电流反馈至控制器,当各电动机电流差大于设定的阈值时,控制器根据电流差大小调节对应电动机的控制泵给定频率,以改变电动机电流,进而改变电动机输出功率,实现各电动机之间的功率平衡。
多机驱动的带式输送机功率平衡控制,就是根据电动机反馈的电流来调节控制泵给定频率。然而控制泵油压的调节与反馈,主、从动摩擦片之间的油膜厚度改变等环节具有滞后性与非线性的特性,影响功率平衡控制的稳定与可靠。本文将电流预测算法和PD控制算法相结合,对电动机输出功率进行快速、准确控制,实现多电动机间的功率平衡。
3.1 电流预测算法
已知采样点x0—x3及其对应的电动机电流采样值f(x0)—f(x3),采用T/2预测算法(T为采样周期)[5]预测采样点xi的电动机电流f(xi),如图2所示。
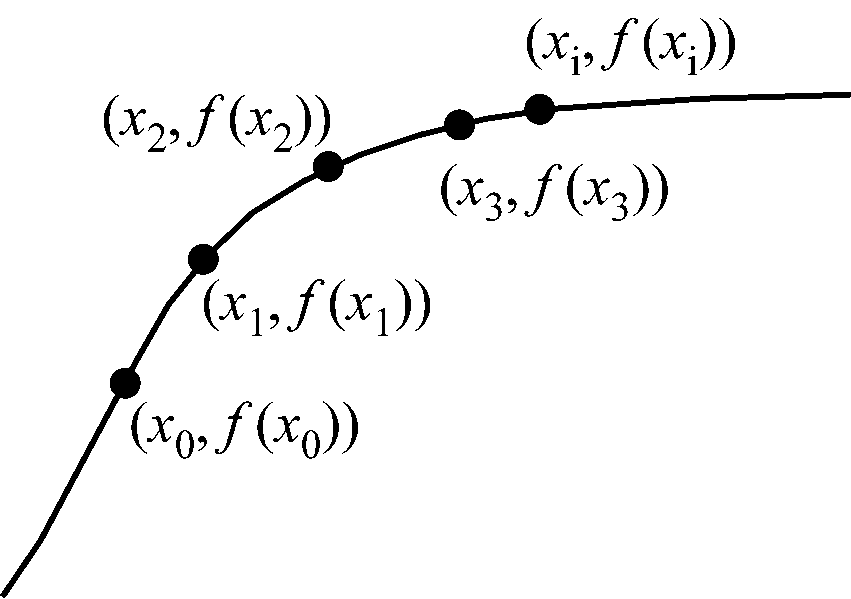
图2 预测示意
由四阶牛顿插值公式可得
f(xi)=f(x0)+f[x0,x1](xi-x0)+
f[x0,x1,x2](xi-x0)(xi-x1)+
f[x0,x1,x2,x3](xi-x0)(xi-x1)×
(xi-x2)
(2)
式中:f[x0,x1]为一阶差商,![]() ;f[x0,x1,x2]为二阶差商,
;f[x0,x1,x2]为二阶差商,![]() ;f[x0,x1,x2,x3]为三阶差商,
;f[x0,x1,x2,x3]为三阶差商,![]() 。
。
由于x3-x2=x2-x1=x1-x0=T,根据式(2)可得
(3)
由此,控制器可根据已知采样点的电流计算出下半个周期的电动机电流预测值。
3.2 PD控制算法
PD控制算法能预测误差变化的趋势,避免被控量的严重超调,改善调节过程中的动态特性[6]。因此,本文采用PD控制算法调节控制泵给定频率。
PD控制算法微分方程为
(4)
式中:u(t)为PD控制输出量;KP为比例系数;e(t)为PD控制输入量;TD为微分时间常数;t为时间。
通过离散化,可推导出增量式PD控制算法差分方程:
(5)
式中:Δu(k)为PD控制输出量的增量;e(k),e(k-1),e(k-2)分别为PD控制在k,k-1,k-2采样时刻的输入量;KD为微分系数。
当2台电动机电流差超出阈值时,电流较大的电动机对应的控制泵给定频率调整公式如下:
(6)
式中:f(k),f(k-1)分别为控制泵在k,k-1采样时刻的给定频率。
在川煤集团广能公司绿水洞煤矿主平硐5.6 km长带式输送机上对本文控制方法进行验证。带式输送机由4台250 kW电动机及相应的4台液体黏性软启动装置驱动,如图3所示。设采样周期为1 s,电动机电流差阈值为5 A,KP=0.2,KD=0.05。当控制泵给定频率小于25 Hz时,控制泵给定频率以2 Hz/s自增;当控制泵给定频率大于等于25 Hz且小于40 Hz时,若任意2台电动机预测电流偏差小于阈值,控制泵给定频率以0.2 Hz/s自增,若任意2台电动机预测电流偏差大于阈值,则电流较大的电动机对应的控制泵给定频率以PD控制算法计算出的|Δu(k)|逐秒减小;当控制泵给定频率大于等于40 Hz且小于50 Hz时,控制泵给定频率以1 Hz/s自增。
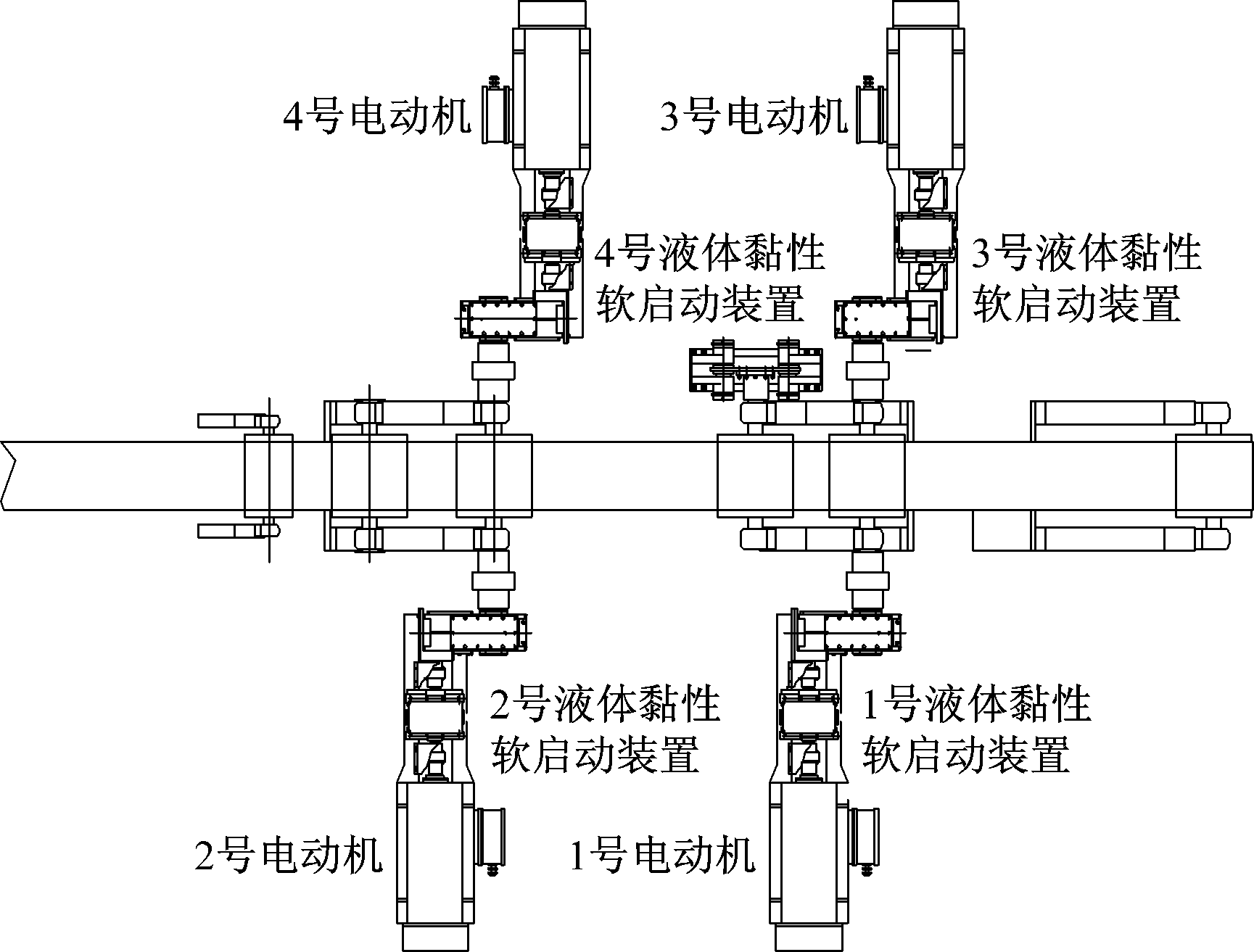
图3 带式输送机驱动装置平面布置
空载和重载启动时4台电动机电流及控制泵给定频率曲线分别如图4、图5所示。从图4可看出,1号电动机电流在启动后快速增大,超出阈值,1号控制泵给定频率减小从而调节1号电动机电流减小;当3号控制泵给定频率增大至31 Hz左右时,3号电动机电流猛增,此时1号电动机电流骤降,3号控制泵给定频率开始减小,3号电动机电流迅速减小;直到3号控制泵给定频率重新上升从而调节3号电动机电流与其他3台电动机电流接近时,4台控制泵给定频率开始同步增加,直至到达工频。从图5可看出,由于重载启动惯性更大,在启动过程中3号电动机电流有2次较大的波动,启动时间也比空载时延长了42 s,但本文控制方法依然起到了有效的调节作用,启动完成时4台电动机电流趋于一致,有效控制了4台电动机在启动过程中的功率平衡。
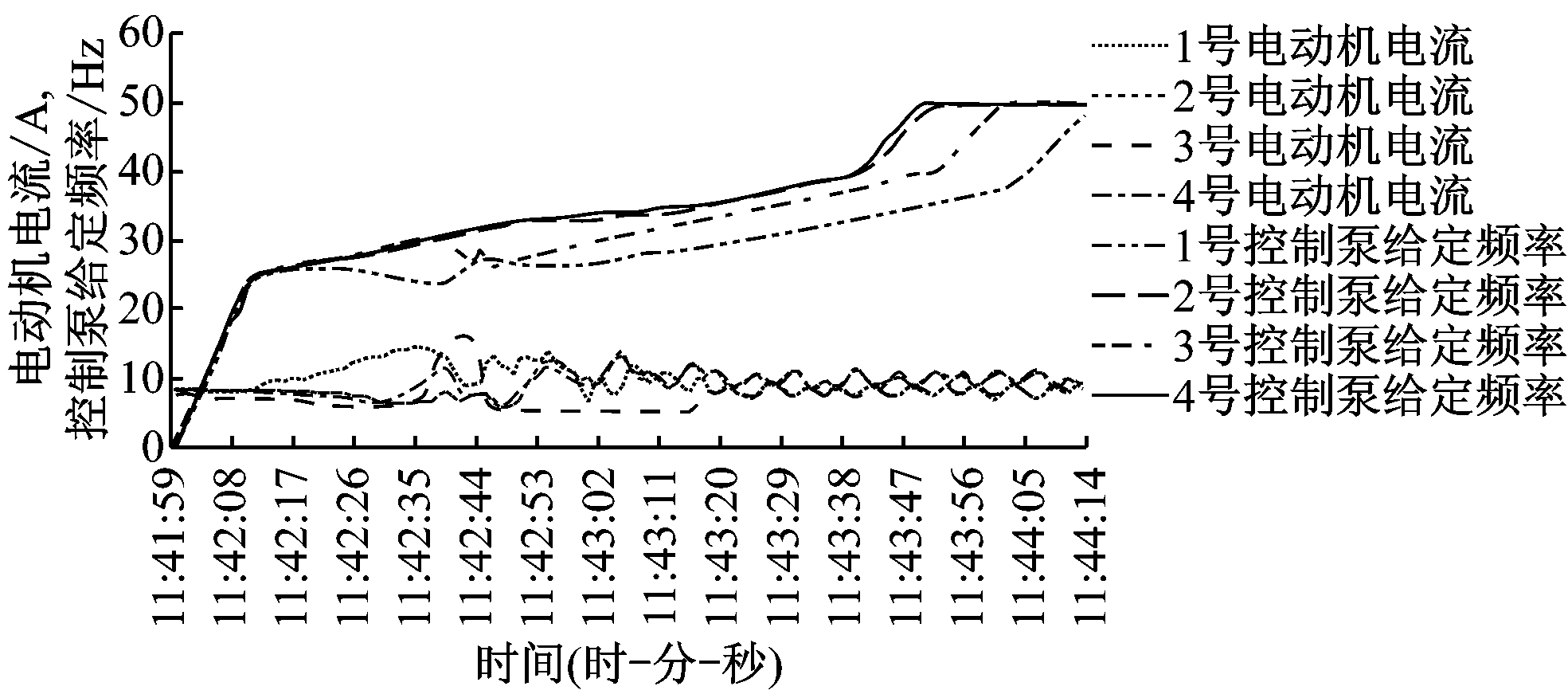
图4 空载启动时4台电动机电流及控制泵给定频率曲线
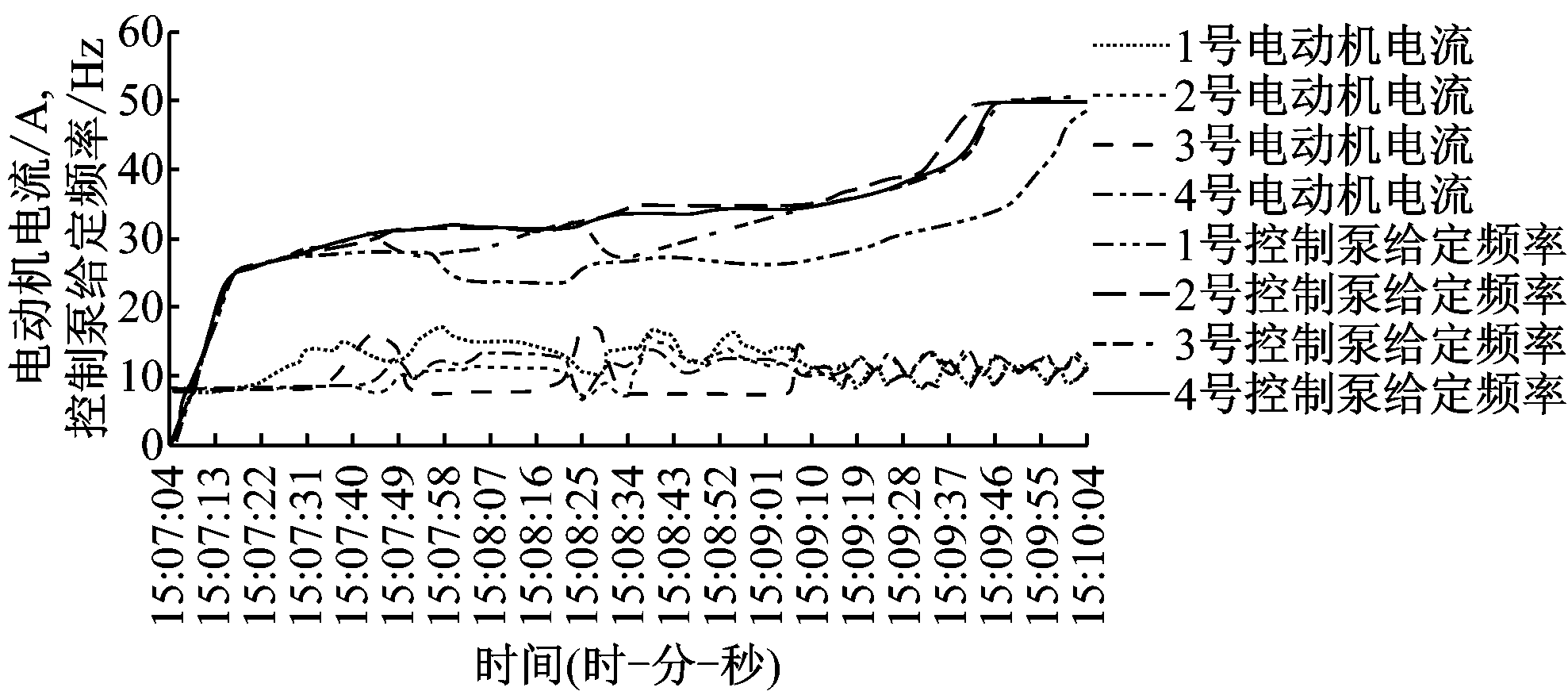
图5 重载启动时4台电动机电流及控制泵给定频率曲线
在采用液体黏性软启动装置的多机驱动带式输送机启动过程中,利用电流预测算法及PD控制算法将各电动机电流差控制在一定范围内,平衡各电动机的输出功率,保证了多机驱动带式输送机的平稳启动和功率平衡,满足煤矿对带式输送机启动及运行经济性、高效性的需求。
参考文献:
[1] 杨光辉,安琪.多机驱动带式输送机功率平衡模糊控制方法[J].工矿自动化,2014,40(3):69-73.
[2] 余发山,韩超超,田西方,等.带式输送机多机变频驱动功率平衡控制研究[J].工矿自动化,2013,39(3):69-73.
[3] 杨继周,李文国,赵中华.带式输送机液粘软启动装置的分析[J].中州煤炭,2007(6):29-30.
[4] 郭春林.带式输送机多机驱动功率平衡调整原理的研究[J].煤矿机械,2009,30(10):33-34.
[5] 欧阳名三,莫丽红.采用参数预测及模糊控制的胶带多机驱动功率平衡的研究[J].煤炭学报,2005,30(2):255-258.
[6] 张国范,顾树生,王明顺,等.计算机控制系统[M].北京:冶金工业出版社,2004.
XUE Yanbo
(CCTEG Chongqing Research Institute, Chongqing 400039, China)
Abstract:In view of problem of motor power unbalance in process of starting of multi-motor driving belt conveyor which uses hydro-viscous soft starting device, a power balance control method of multi-motor driving belt conveyor was proposed. A current prediction algorithm is used to predict motor current in order to improve control response speed. According to difference between the motor predictive currents, given frequency of control pump which is connected with the hydro-viscous soft starting device is adjusted through proportional derivative control algorithm, then the motor current is changed, so difference between the motor currents can be controlled in a certain range. The field application result shows that the method can restrain excessive current of motor whether no-load or heavy-load starting of the belt conveyor, which achieves smooth start and power balance of the belt conveyor.
Key words:belt conveyor; multi-motor driving; hydro-viscous soft starting device; power balance; current prediction; PD control
中图分类号:TD634.1
文献标志码:A 网络出版时间:2016-03-07 15:22
作者简介:薛彦波(1982-),男,河南焦作人,助理研究员,硕士,主要从事煤矿自动化与信息化、工业自动化方面的研究工作,E-mail:84576683@qq.com。
基金项目:工信部2014年物联网发展专项资金项目(2014083105)。
收稿日期:2015-11-19;修回日期:2016-01-23;责任编辑:盛男。
文章编号:1671-251X(2016)03-0074-04
DOI:10.13272/j.issn.1671-251x.2016.03.017
网络出版地址:http://www.cnki.net/kcms/detail/32.1627.TP.20160307.1522.017.html
薛彦波.多机驱动带式输送机功率平衡控制方法[J].工矿自动化,2016,42(3):74-77.