王楠1,2, 吴亮生1,2, 杨阳1,2, 卢杏坚1,2
(1.广东省自动化研究所 广东省现代控制技术重点实验室, 广东 广州 510070;
2.广东省自动化研究所 广东省现代控制与光机电技术公共实验室, 广东 广州 510070)
摘要:针对现有小功率半导体激光指向器的作用距离检测方法存在稳定性差、效率低的缺点,提出了一种基于CCD测量技术的激光指向器作用距离检测方法。该方法采用CCD传感器及图像处理技术,对基于人眼为接收器的激光指向器作用距离公式进行了理论推导及建模,建立了CCD传感器接收光功率和输出灰度之间的函数关系,并运用最小二乘法求解出关系式中的相关系数,通过相关系数求解出作用距离,实现了小功率激光指向器作用距离的定量检测。实验证明了该方法的可行性。
关键词:激光指向器; 作用距离; CCD传感器; 光功率; 灰度
激光指向器现已广泛应用于矿山巷道掘进时的指向定位。激光指向器的作用距离是指激光指向器在打开的状态下,人眼能清晰可辨激光光斑的最远距离[1],它是考核激光指向器性能的一个重要参数,因此,对其进行准确测量有着重要的意义。
目前,激光指向器作用距离的检测方法主要有立靶法,即在距离激光指向器激光出射口一定距离处放置一个靶标,将指向器激光打到靶上,以能否清晰看到靶标上的激光光斑作为检测其作用距离的标准。这种方法因受个体人眼差异影响比较大,检测存在稳定性差、效率低的缺点。为此,笔者提出了一种基于CCD测量技术的激光指向器作用距离检测方法。该方法首先对基于人眼的激光指向器作用距离公式进行推导并建模,然后得出激光指向器作用距离与CCD灰度的关系,进而实现小功率激光指向器作用距离的定量检测,提高了检测效率[2]。
由于激光指向器是用人眼观察的,所以,其作用距离与人眼对环境的感受有关,即在亮背景和暗背景下,其作用距离的值是不同的。激光指向器作用距离的计算不能采用一般形式的雷达方程[3]。距激光出射口R处光斑面积的计算如图1所示。假设激光器指向器的激光出射口径为D,束散角为θ,则在距离激光指向器出射口R处光斑的面积A为
(1)
式中r为光斑的半径。
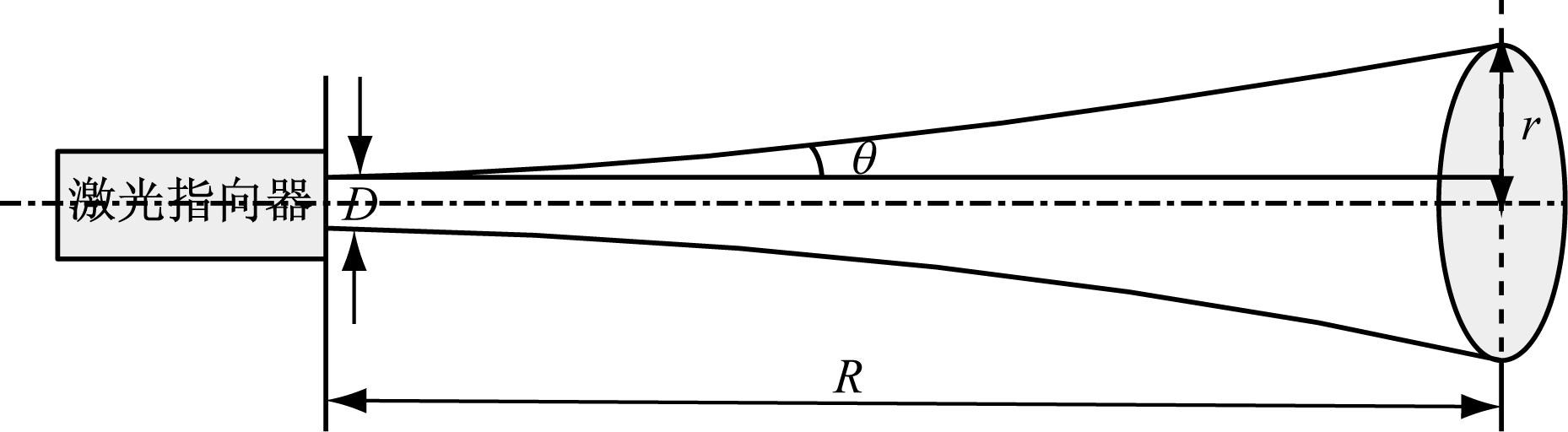
图1 距激光出射口R处光斑面积的计算
由光照度公式[4]可计算出激光光通量φv。
(2)
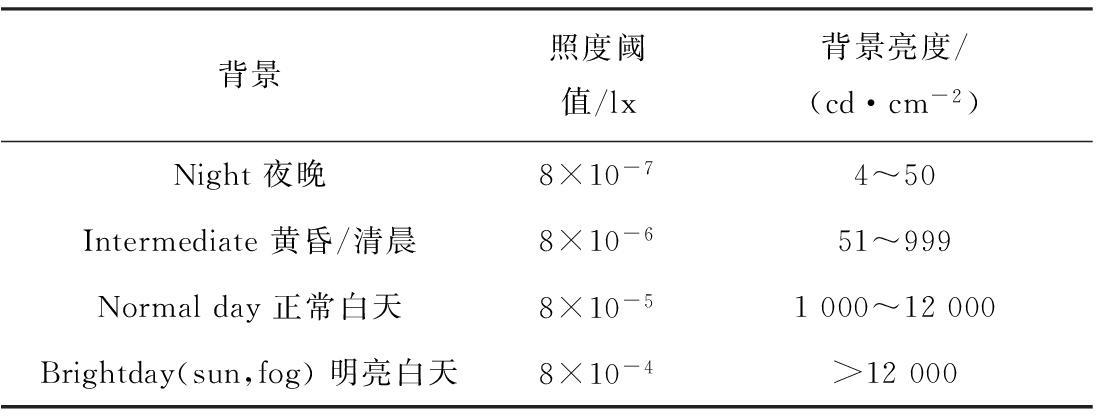
式中:Ev为光照度;E为背景照度,由于巷道内的亮度很低,根据不同背景下照度阈值与背景亮度之间的关系[5](表1),E取夜晚状态。
表1 不同背景下照度阈值与背景亮度之间的关系
光通量和辐射量之间的关系式为
(3)
式中:Km为最大光谱光视效能;V(λ)为光谱光效率值[6];φe(λ)为辐射量;λ为波长。
由式(3)可知,在距激光指向器激光出射口R处激光辐射量φe(λ)为
(4)
将最大光谱光视效能Km=683 lm/W,背景照度E=8×10-7lx代入式(4),得
(5)
在距离激光指向器激光出射口R处激光光斑的散射功率Pr为
(6)
式中: Pt为发射功率;τ为激光单程水平大气衰减系数。
距激光指向器激光出射口R处的激光幅射量与距激光指向器激光出射口R处的功率相等[6] ,即
(7)
由于小功率激光指向器的作用距离多为100 m以内,距离短,所以,可将大气衰减系数视为1,即
(8)
将式(5)、式(7)代入式(8),得到激光指向器作用距离R与在R处功率Pt之间的关系式如下:
(9)
从式(9)可知,只要测出束散角θ和激光的发射功率Pt就可以求解出作用距离R。实测中,可采用焦斑法和CCD传感器测出θ值和光斑图像灰度值。激光指向器光功率与CCD灰度两者间的数学关系如下:
(10)
(11)
式中:G为CCD测得的平均灰度值;k,b为待定系数;![]() 为CCD接收的光功率;τ′为测量系统衰减系数。
为CCD接收的光功率;τ′为测量系统衰减系数。
将式(11)代入式(10),得
(12)
将式(12)代入式(9),可得作用距离R与平均灰度值G之间的关系:
(13)
作用距离R与束散角θ、平均灰度值G、光谱光效率值V(λ)、波长λ、孔径D之间的关系为
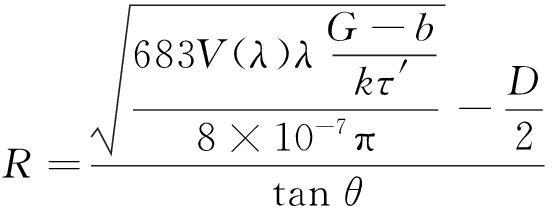
(14)
实验采用OPHIR激光功率计、敏通22K9HC型CCD相机、4通道图像采集卡Picolo 2、衰减系数为10-3的衰减片及2片偏振片构成衰减系统,实验装置实物如图2所示。
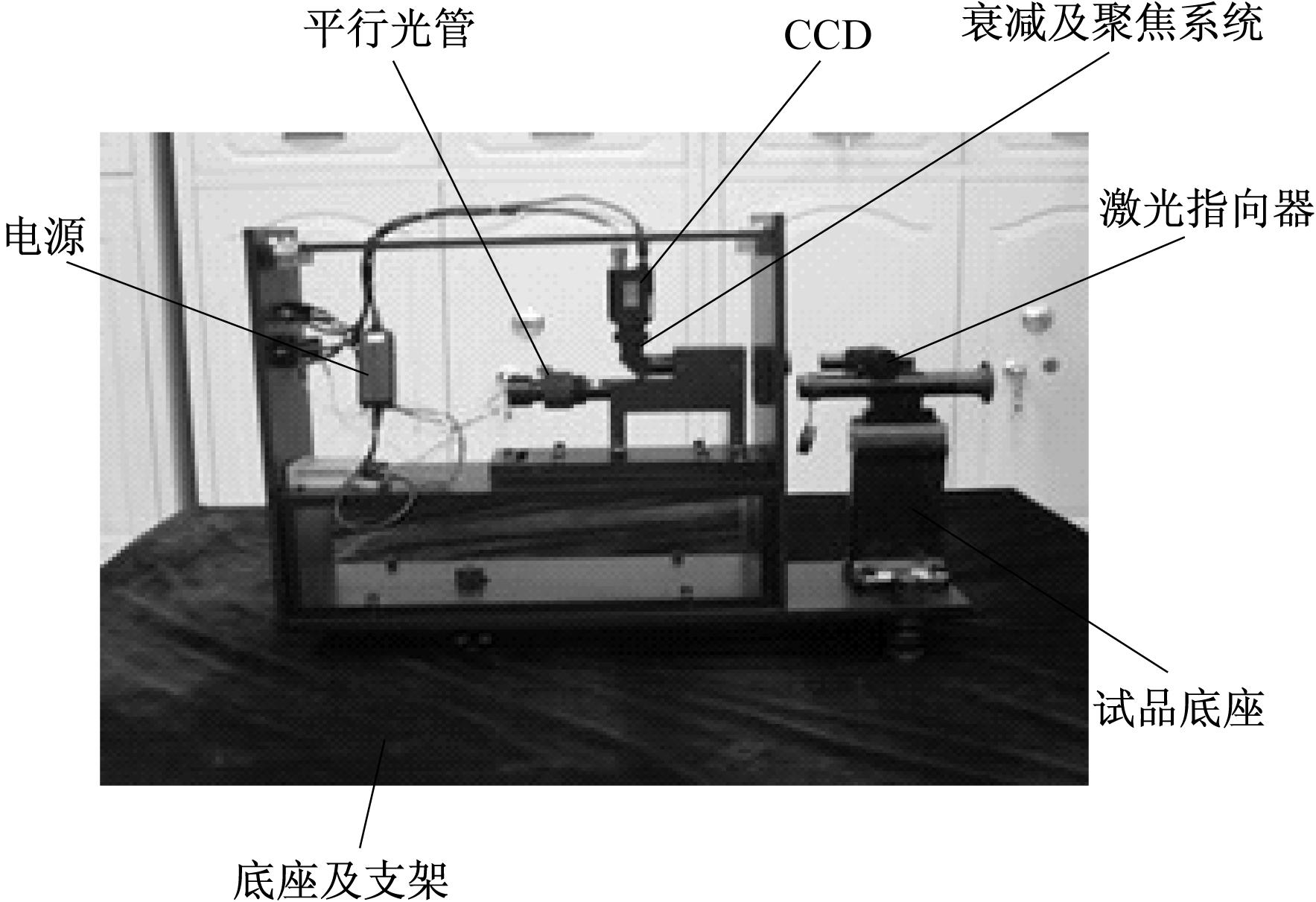
图2 实验装置实物
激光通过衰减系统后,照射到CCD相机的光敏面及光功率计上,光功率计和CCD在同一平面,实验原理如图3所示。
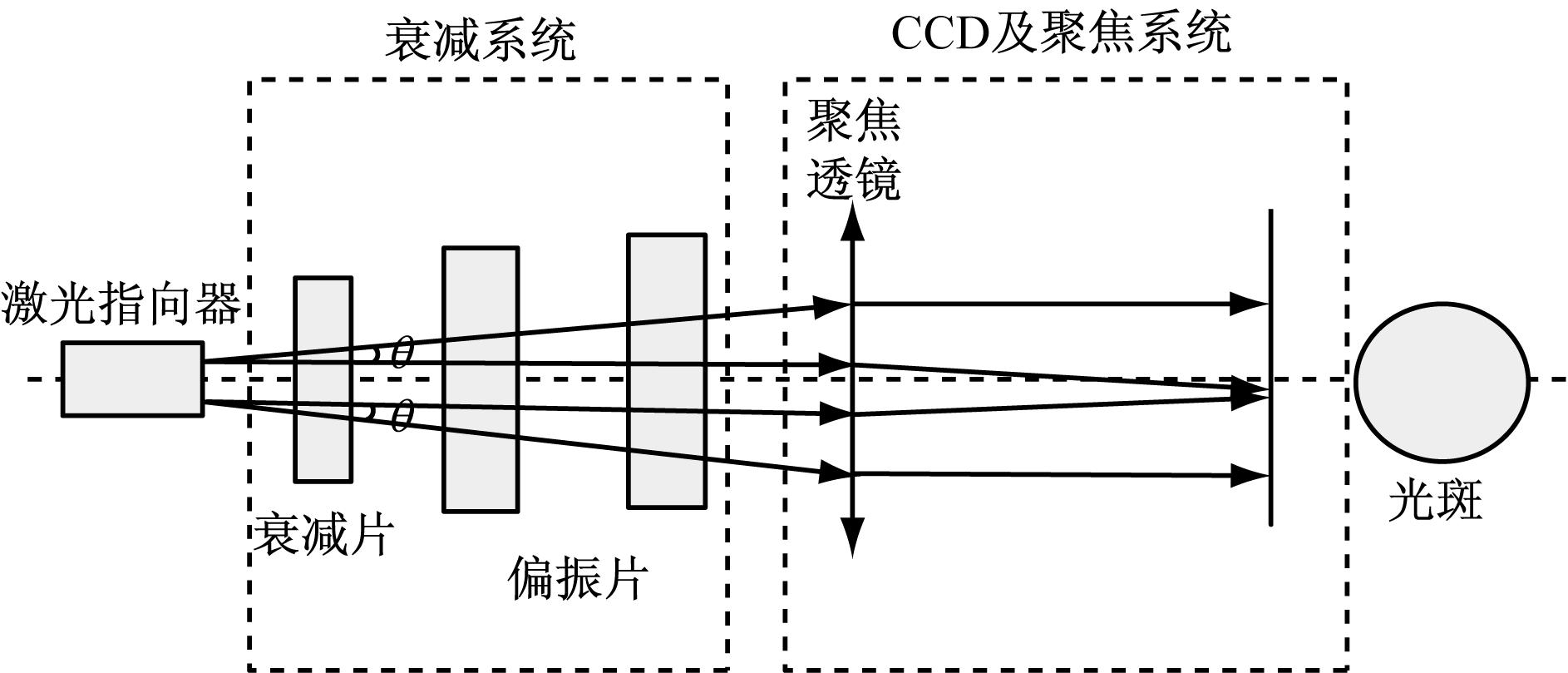
图3 实验原理
分别测得CCD的平均灰度值G与CCD接收光功率![]() ,见表2。对表2中的数据
,见表2。对表2中的数据 进行最小二乘法直线拟合,拟合的直线如图4所示,可得k=128.81,b=19.48,将k,b值代入式(10),得到光功率
进行最小二乘法直线拟合,拟合的直线如图4所示,可得k=128.81,b=19.48,将k,b值代入式(10),得到光功率![]() 与平均灰度值G之间的函数关系为
与平均灰度值G之间的函数关系为
(15)
将式(11)代入式(15)得出激光的发射功率Pt与CCD的平均灰度值G之间的函数关系为
(16)
表2 CCD接收的光功率Pt与对应的平均灰度值G的测量值
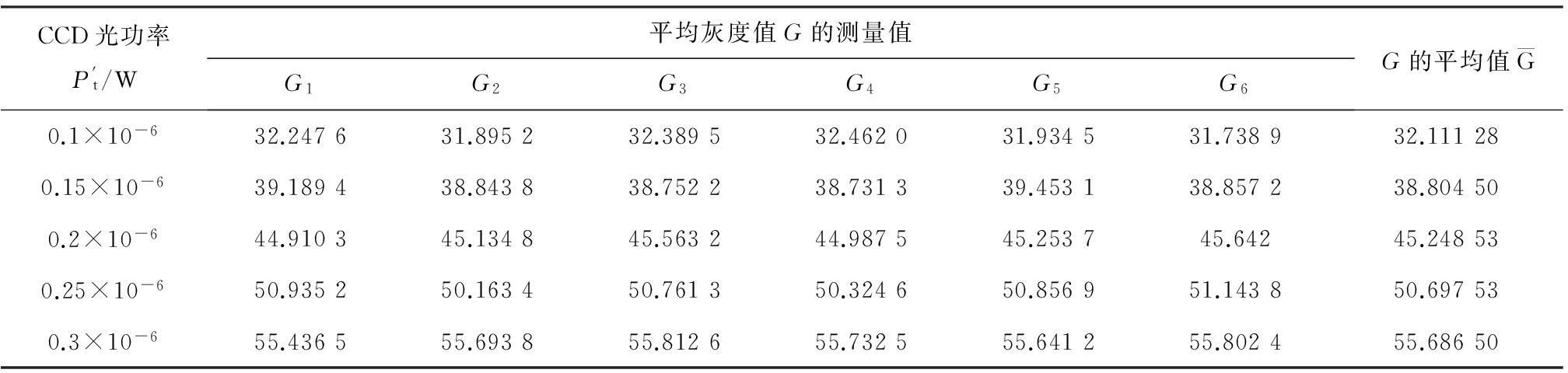
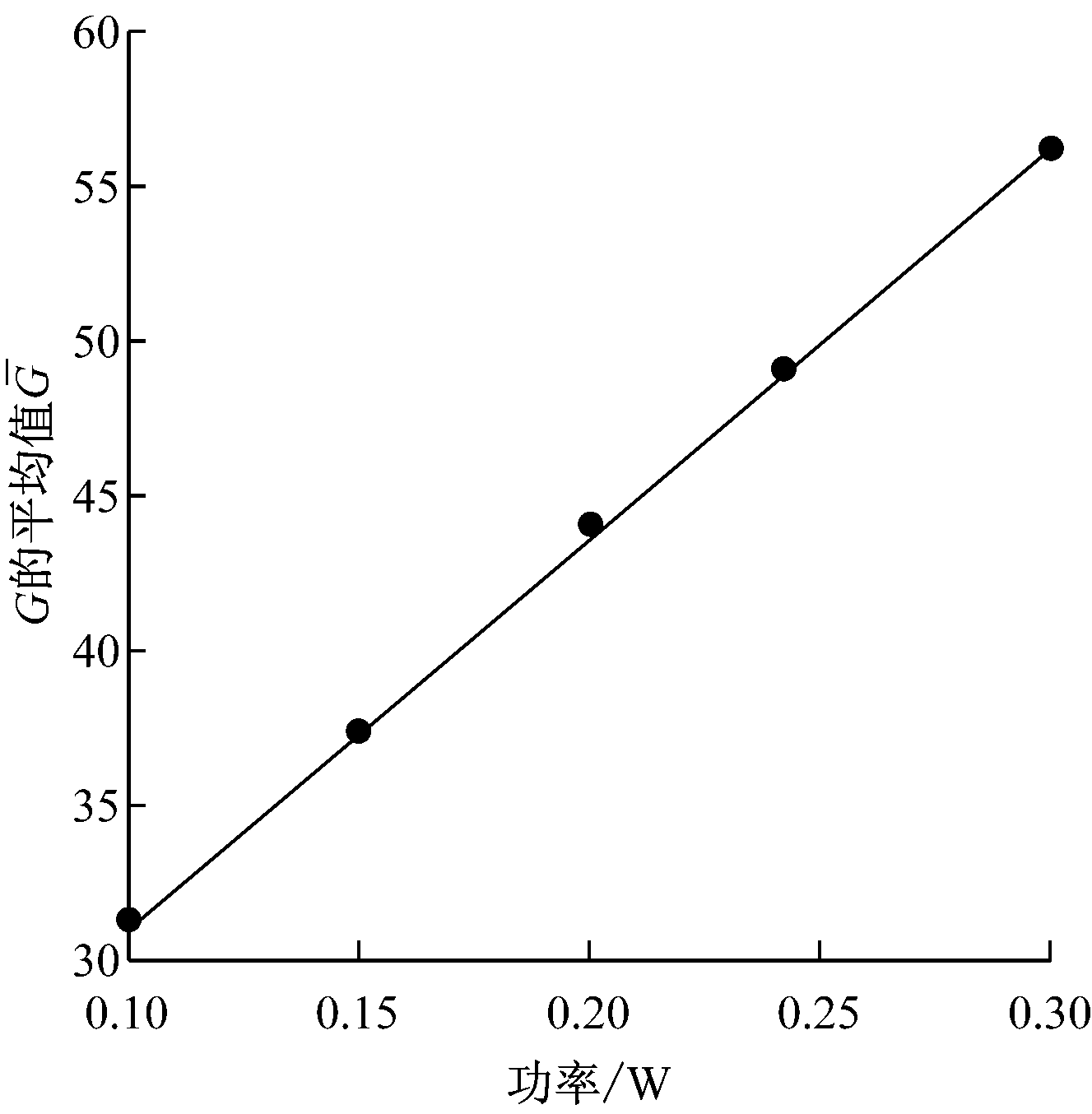
图4 CCD接收的光功率与平均灰度值的拟合关系直线
以某型波长为635 nm、出射孔径为4 mm的半导体激光指向器为例进行实测,由光谱光效函数得出光谱光效率值V(λ)=0.25;实验选用8位视频采集卡,即G的最大值为255[7-9]。
取实测值θ=1 mrad,G=32.111 28,τ=10-4,由式(15)得
R|m=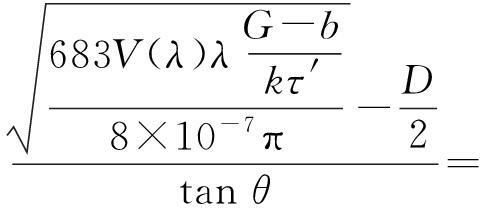
203.734 1
(17)
按照以上方法重复测量100次,利用本文方法测得的平均值为203.65 m,结果范围为202.38~203.97 m,误差为1.59 m;而利用立靶法测量100次,测得的平均值为202.42 m,结果范围为200.68~204.57 m,误差为3.89 m。2种方法测得的结果相近,证明2种方法均可以实现对小功率半导体激光指向器作用距离的检测,且本文方法测量的误差范围小于立靶法,稳定性优于立靶法。
基于CCD测量技术的激光指向器作用距离检测方法对基于人眼的作用距离公式进行推导并建模,得出激光指向器作用距离与CCD灰度的关系,实现了小功率激光指向器作用距离的定量检测。实验证明,该方法测量结果完全满足激光指向器作用距离检测精度要求,且测量误差小于立靶法,具有稳定性好、效率高的优点。
参考文献:
[1] 杨晓杰,何永强,周冰,等.简易估计激光探测系统作用距离[J].光电工程, 2009,36(9):71-75.
[2] 毛翔,杨晓波.一体式激光器 [J]. 轻兵器, 2009(2):12-15.
[3] 郑永超,赵铭军,张文平,等. 激光雷达技术及其发展动向[J].红外与激光工程,2006,35(增刊3):240-246.
[4] 张欣,胡国清.照度E与亮度L的关系[J].公用工程设计,2009(2):70-71.
[5] VAISALA. Vaisala background luminance sensor LM21 user's guide[K].Helsinki:Vaisala,2012.
[6] 刘永超,杨淑娟.激光指示器作用距离建模[J].科技创新导报,2012(7):11.
[7] MERRITT P H, ALBERTINE J R.Beam control for high-energy laser devices[J].Optical Engineering,2013,52(2):021005-1-021005-10.
[8] SHIBATA T A, SAKEMI Y, KOBAYASHI H, et al. A high precision laser alignment monitoring system for HERMES tracking detectors [J]. Nuclear Instruments and Methods in Physics Research Section A: Accelerators, Spectrometers,Detectors and Associated Equipment, 1998, 411(1):75-80.
[9] JEONG S J, LEE S K, JEONG S H. Beam alignment with the axis of a rotation stage for laser fabrication of microcircular structures [J]. Optics & Laser Technology, 2004,36(5):401-408.
WANG Nan1,2, WU Liangsheng1,2, YANG Yang1,2, LU Xingjian1,2
(1.Guangdong Provincial Key Laboratory of Modern Control Technology, Guangdong Provincial
Institute of Automation, Guangzhou 510070, China;
2.Guangdong Province Modern Control and Electromechanical Technology Public Laboratory,
Guangdong Provincial Institute of Automation, Guangzhou 510070, China)
Abstract:In view of the problem of poor stability, low efficiency existed in distance detection method of low power semiconductor laser pointer, a measurement method of detection distance of laser pointer based on CCD detection technology was put forward. The detection distance equation of laser pointer with human eye as the receiver was deduced and modeling by using the CCD sensor and image processing technology. The function mathematical model between the two parameters of optical power and gray scale was also established. The least square method was used to solve correlation coefficient of the equation,the detection distance can be solved by correlation coefficient. The method realizes quantitative detection of detection distance of low power semiconductor laser pointer. The feasibility of the method is verified by experiment.
Key words:laser pointer; detection distance; CCD sensor; optical power; gray scale
作者简介:王楠(1989-),女,吉林大安人,助理工程师,硕士,主要研究方向为仪器科学与技术,E-mail:352137396@qq.com。 张勇(1991-),男,河南驻马店人,硕士研究生,研究方向为直流微网能量管理系统,E-mail:zyong@cumt.edu.cn。通信作者:徐瑞东(1979-),男,江苏启东人,副教授,主要研究方向为可再生能源发电与微网技术,E-mail:ruidongxu@163.com。
基金项目:广东省科技计划项目(2011A060901026,2013B060600004,2013B091300013)。
收稿日期:2015-10-15;修回日期:2015-11-12;责任编辑:张强。 2015-11-24;修回日期:2015-12-21;责任编辑:胡娴。
中图分类号:TD655
文献标志码:A 网络出版时间:2016-01-26 15:48
文章编号:1671-251X(2016)02-0058-04
DOI:10.13272/j.issn.1671-251x.2016.02.015
王楠,吴亮生,杨阳,等.基于CCD测量技术的激光指向器作用距离检测[J].工矿自动化,2016,42(2):58-61.