图1 移动机器人电器系统结构
赵建伟, 王洪燕, 唐兵, 杨中亚
(中国矿业大学(北京) 机电与信息工程学院, 北京 100083)
摘要:根据GPS工作原理,设计了GPS定位模块,并将其应用于移动机器人的定位及导航中。分别在室外和室内对安装有GPS定位模块的移动机器人进行实验,设定起点和终点,使机器人通过实验路段。将室外实验结果文件导入谷歌地图中,可在谷歌地图上生成机器人运动轨迹并实时观察到机器人所处的位置;采用Matlab对室内实验结果进行处理,结果表明GPS定位模块可在室内实现移动机器人路径回放功能。
关键词:移动机器人; GPS; 定位; 轨迹生成; 路径回放
机器人被越来越多地应用在复杂环境的探索工作中。机器人要实现在复杂环境中漫游与避障,应具有自主建立环境地图、传送地图的能力,如果要完成某些特定任务,还应具有远程遥控操作能力。而机器人的路径回放及机器人实时位置的确定,有助于机器人避障及环境定位功能的实现。
在其他条件不变的前提下,可通过增加机器人的运行时间和观测次数来提高地图的估计精度[1]。本文通过在移动机器人的运行过程中增加高精度GPS定位模块,实现机器人的轨迹生成、路径回放及定位功能。
GPS是一种具有全方位、全天候、全时段、高精度的卫星导航系统,由空间部分、地面控制部分以及用户部分组成。空间部分主要使地面上任意一点随时随地观测到4颗以上卫星[2];地面控制部分用于收集卫星传回的信息,获取必要的导航和定位信息;用户部分则根据地面控制部分计算出的数据,按照定位解算方法确定用户所在地理位置的经纬度、高度、速度、时间等[3]。GPS系统工作原理:地面控制部分测量出多个已知空间位置的卫星到用户接收机之间的距离及角度等信息,综合多颗卫星数据即可计算出机器人所处的具体位置。
本文设计的移动机器人可通过融合复杂环境中的各种传感器信息,实现对自身运动的闭环控制及在复杂环境中的避障功能;通过安装GPS模块,可实现在复杂环境下的自主漫游功能[4]。
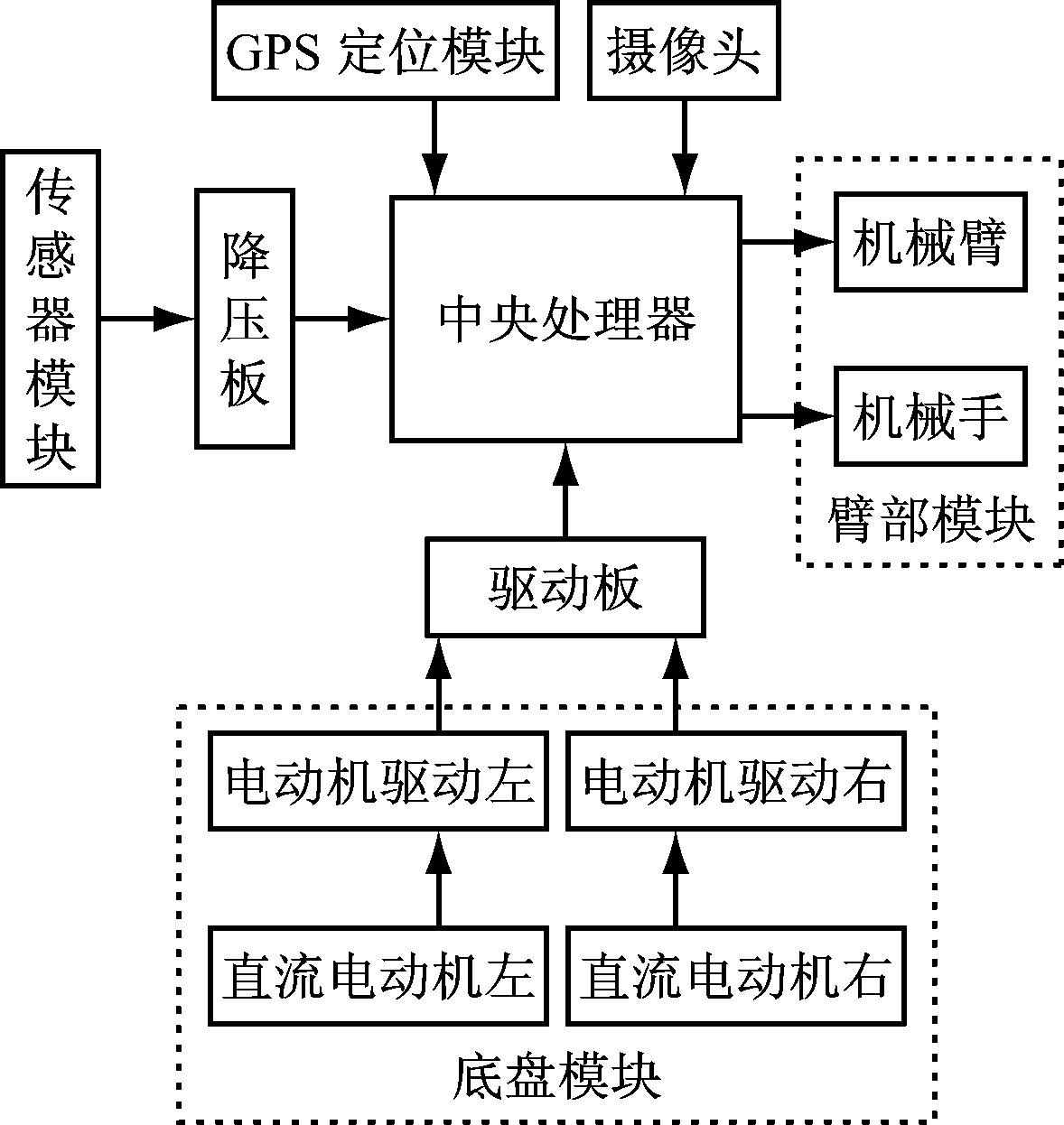
移动机器人的电器系统是整个机器人的设计核心,主要包括电源模块、传感器模块、臂部模块、底盘模块、GPS定位模块等[5],如图1所示。
图1 移动机器人电器系统结构
底盘模块采用带编码器的空心杯减速直流电动机2342L012,其额定电压为12 V,输出功率为17 W,输出转矩大,减速比高,用于智能小车中转速反馈控制时可使转速稳定性高。传感器模块包括红外传感器和超声波传感器,采用复合滤波算法使机器人具有良好的避障功能[6]。GPS定位模块协助机器人实现地图生成和定位的功能[7-8]。臂部模块为安装有金属材料的机械臂和机械手,在GPS定位基础上实现固定位置取放材料功能。
本次实验致力于通过扩展板的模块化和轻量化,实现移动机器人更多功能,因此选用Microduino扩展板,功能模块可相互堆叠,即插即用,使扩展板的功能迅速得到扩展。Microduino扩展板包含核心模块、GPS定位模块、记录模块、电池模块、显示模块。
2.1 GPS定位模块组成
GPS定位模块由GPS天线、电源、变频器、信号处理模块、应用处理模块等组成,如图2所示。软件部分包括内软件和外软件,内软件是指GPS单点定位软件或固化在中央处理器的自动操作程序等;外软件是指GPS数据处理程序。
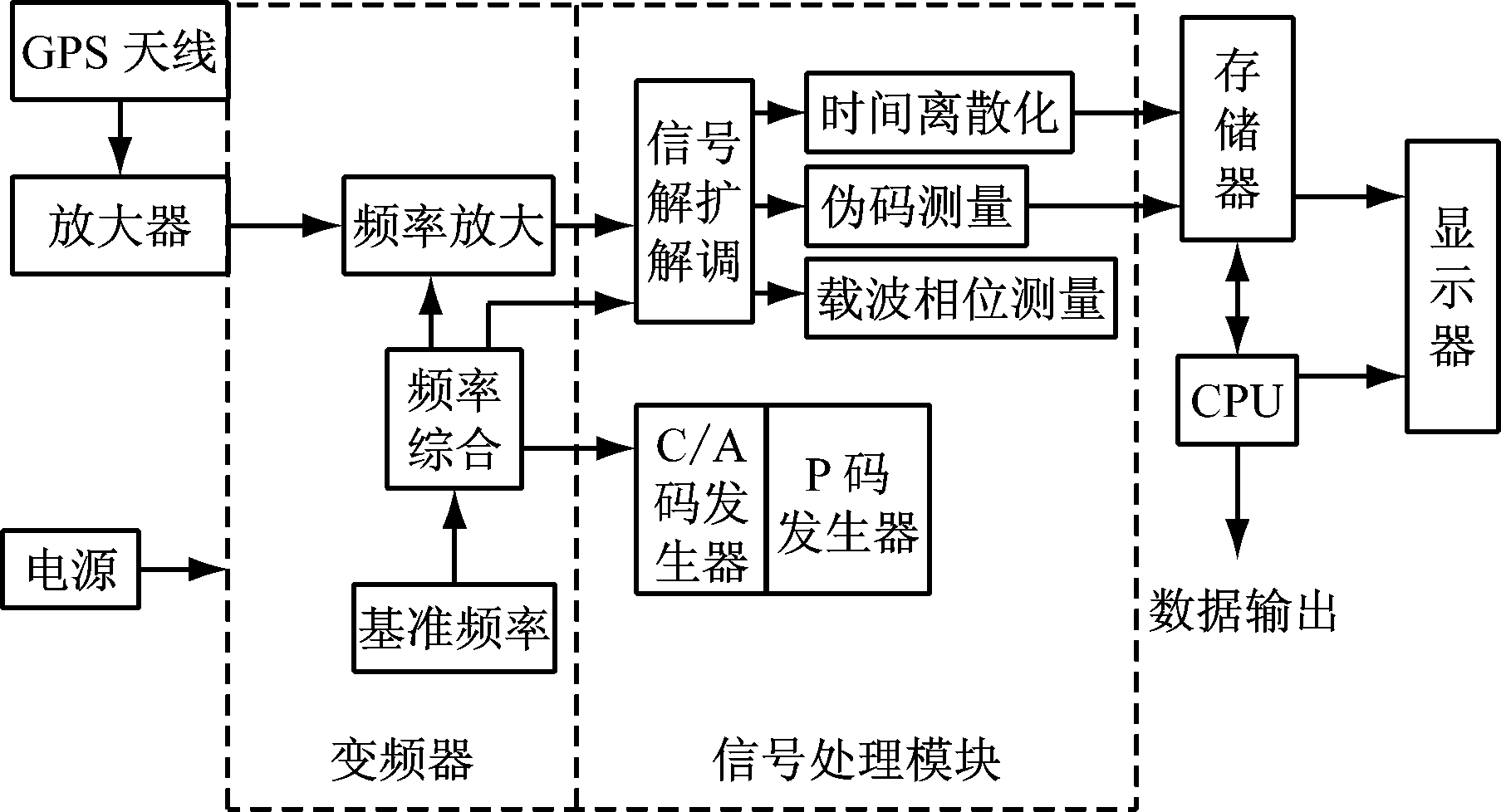
图2 GPS定位模块组成
电源开启后,GPS天线接收卫星发射的电磁波信号,捕获到按一定卫星高度截止角选择的待测卫星信号,并跟踪这些卫星,获得必要的导航和定位信息及观测量;变频器和信号处理模块对接收到的GPS信号进行变换、放大和处理,测量出GPS信号从卫星到GPS天线的传播时间,解译出GPS卫星所发送的导航电文,实时计算出移动机器人的三维位置,甚至三维速度和时间。
2.2 GPS定位模块连接
图3为GPS定位模块引脚连接。GPS定位模块电压供电范围为3.3~5 V,将GPS定位模块与Microduino扩展板的其他模块进行串口匹配,1PPS作为秒脉冲输出引脚。Microduino扩展板默认与GPS定位模块的串口通信引脚为RXA,TXA,用于与外界端口连接。USB端口(USBDP,VDD)作为与PC机传输数据的实际接口。GND为接地线,引脚18,20,22须连接在一起。BOOT引脚在正常工作时不需要连接,悬空即可。
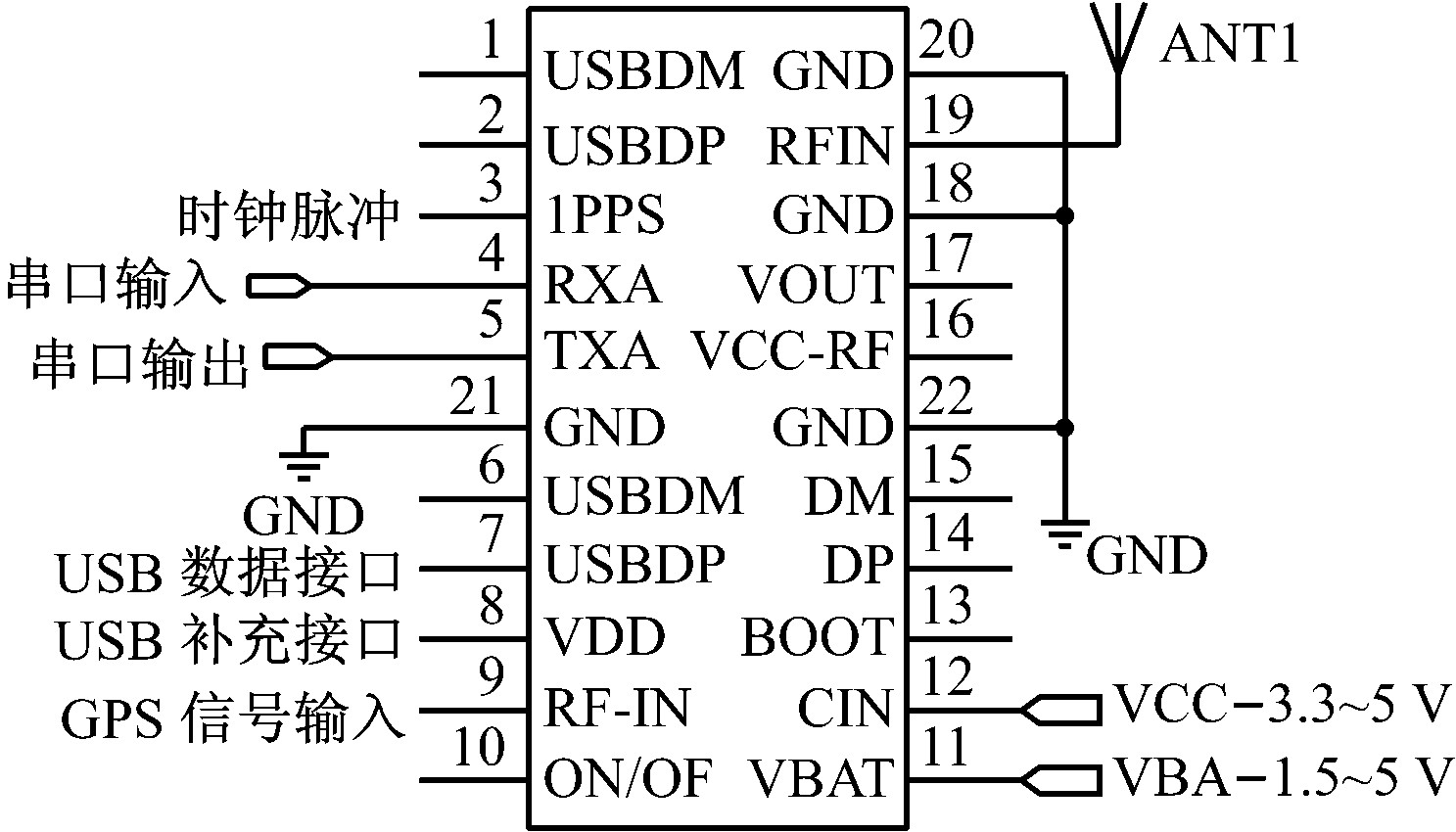
图3 GPS定位模块引脚连接
2.3 GPS漫游实验
将安装好GPS定位模块的移动机器人置于人流稀疏地段,GPS定位模块可自行供电,上电后红色LED闪烁。按下启动键,GPS定位模块的绿色LED闪烁,表示该模块已连上卫星,按下SD卡启动键,SD卡开始读取GPS数据并记录。选择运动场作为本次实验的起始点,图书馆作为终点,总距离约为1 000 m,实验过程持续约30 min。该机器人自带避障功能,可避免运行过程中发生碰撞。
为确保实验结果的准确性和有效性,进行3次实验,除不可抗拒因素外,实验环境完全相同。第1次实验结束后,按下结束键切换至下一段记录,连续运行3次,并取最优结果。最后关闭电源,结束实验。
在实验过程中,GPS定位模块显示器可显示时钟、经纬度、运行速度、连接卫星个数、海拔高度、信号强度等信息,便于观测。
2.4 基于谷歌地图的室外运动轨迹生成
实验中自动生成的存储文件以特定的地图格式置于存储器中,文件名可自行设置。生成的数据流以GPX格式文件存储于GPS定位模块的存储器中,数据流信息包括时间、位置、速度等,由Microduino扩展板进行处理,PC机只需接收处理后的数据进行绘图即可。
将实验结果导入谷歌地图中,即可在谷歌地图上自动生成移动机器人的运动轨迹,如图4所示。点击运动轨迹的任意一点即可显示该点的经纬度、海拔高度、运行速度等。GPS定位模块的单点定位精度约为3~5 m,实验结果在速度和路线上有细微差别,但可表明移动机器人能够实现路径回放功能。若对移动机器人进行适当控制,可实现机器人在未知环境下的自主漫游。

图4 移动机器人室外运动轨迹
2.5 基于Matlab的室内机器人路径回放
在相同的环境下进行3次室内实验,取最优结果。机器人沿实验室墙边自行漫游,运行完毕后,采用Matlab软件将其结果进行回放并处理,结果如图5所示,其中x,y分别为横向、纵向坐标。
采用最小二乘法拟合实验结果,经Matlab处理后,路径回放结果符合实际情况。可见GPS定位模块在室内也可实现路径回放功能,并协助机器人实现定位及避障。
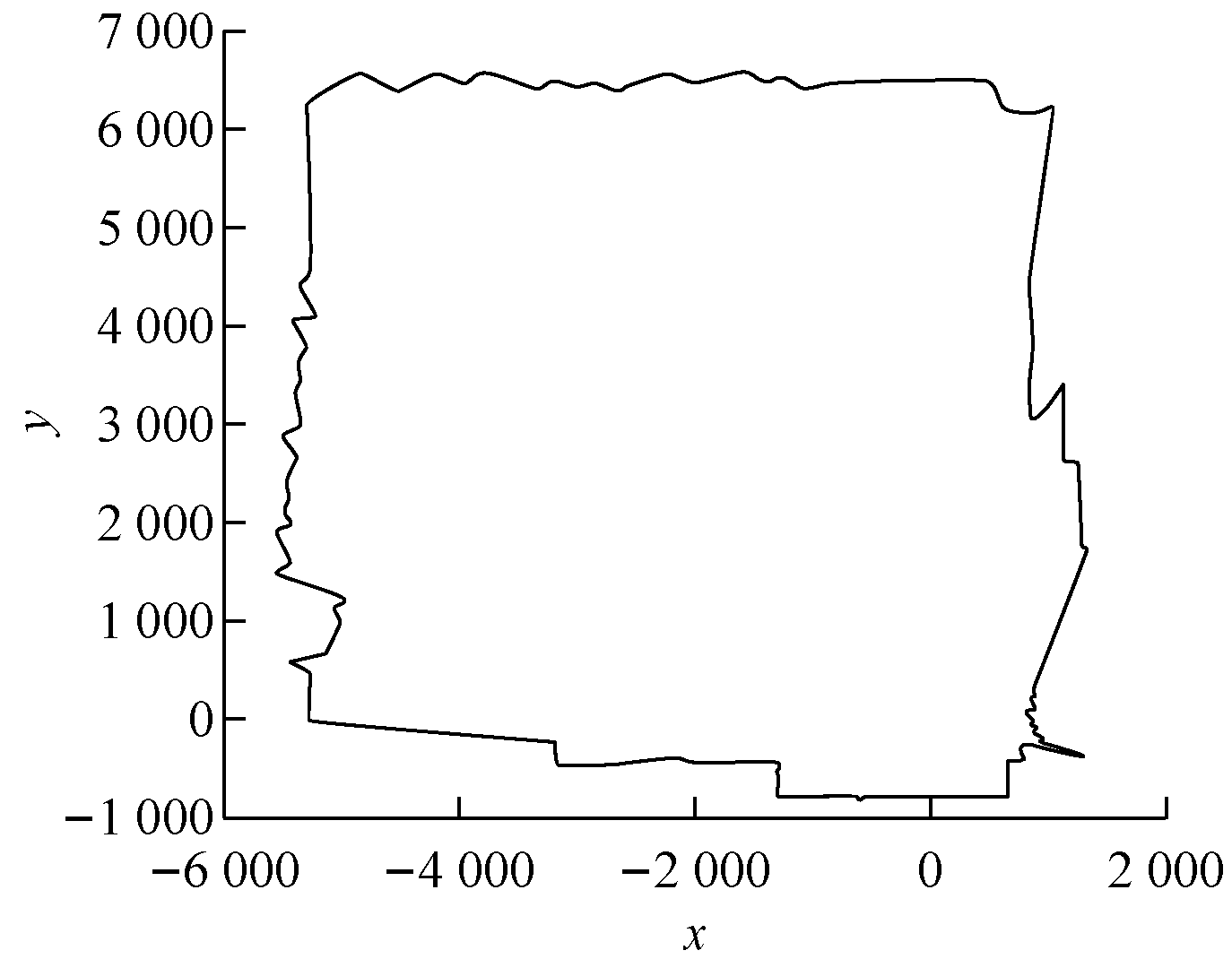
(a) 路径回放
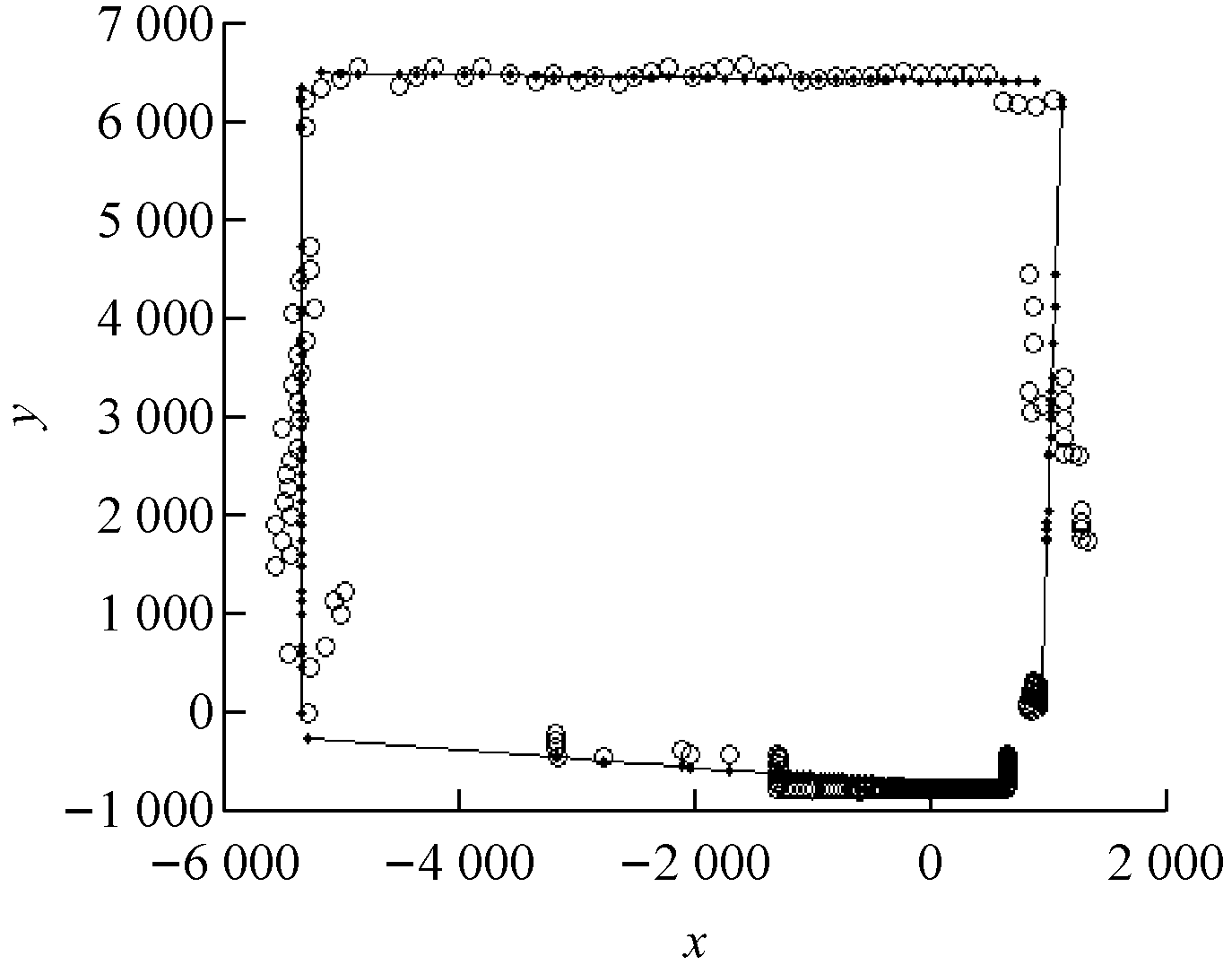
(b) 路径处理结果
图5 基于Matlab的室内机器人路径回放及处理结果
通过对移动机器人的GPS轨迹生成及定位进行实验研究,实现了移动机器人在复杂环境中的漫游及运动路径回放功能。通过GPS定位模块对移动机器人进行实时定位,在定位精度方面需要进一步加强。下一步将改进机器人外形及优化性能,使该机器人实现更多功能。
参考文献:
[1] 张小红,郭斐,李星星,等.GPS/GLONASS组合精密单点定位研究[J].武汉大学学报:信息科学版,2010(1):9-12.
[2] 李倩.GPS/INS组合导航系统研究及实现[D].上海:上海交通大学,2010:105.
[3] 何正斌.GPS/INS组合导航数据处理算法拓展研究[D].西安:长安大学,2012:109.
[4] 张涛.GPS/SINS超紧密组合导航系统的关键技术研究[D].哈尔滨:哈尔滨工程大学,2010:160.
[5] 梁栋,尹晓红,王梦晴.移动机器人研究现状及发展趋势[J].科技信息,2014(9):33.
[6] 叶加伟.GPS接收机捕获跟踪算法研究及FPGA设计[D].成都:西南交通大学,2009:84.
[7] 滕云龙.GPS接收机数据处理技术研究[D].成都:电子科技大学,2011:112.
[8] 石伟.无线传感网络机器人定位导航在减灾救灾中的应用[D].北京:北京邮电大学,2012:73.
赵建伟,王洪燕,唐兵,等.基于移动机器人的GPS轨迹生成及定位研究[J].工矿自动化,2016,42(1):17-19.
ZHAO Jianwei, WANG Hongyan, TANG Bing, YANG Zhongya
(School of Electrical and Information Engineering, China University of Mining and
Technology(Beijing), Beijing 100083, China)
Abstract:GPS location module was designed according to GPS principle and applied in location and navigation of mobile robot. Some tests were done about the mobile robot with the GPS location module indoors and outdoors through setting starting point and destination of moving path of the robot. The result file of outdoor test is introduced into Google maps, so as to generate moving track and observe location of the robot in Google maps real-timely. The indoor test data is processed by Matlab with a result showing the GPS location module can realize path replaying function of the mobile robot indoors.
Key words:mobile robot; GPS; location; track generation; path replaying
作者简介:赵建伟(1979-),男,内蒙古临河人,讲师,博士,研究方向为机器人,E-mail:1126739858@qq.com。
基金项目:中国博士后科学基金资助项目(2012M510424);中央高校基本科研业务费专项基金资助项目(800015FH)。
收稿日期:2015-11-06;修回日期:2015-12-22;责任编辑:李明。
中图分类号:TD67
文献标志码:A 网络出版时间:2015-12-31 15:52
文章编号:1671-251X(2016)01-0017-03 DOI:10.13272/j.issn.1671-251x.2016.01.006