| Citation: | FENG Wei, YAO Wanqiang, LIN Xiaohu, et al. Visual simultaneous localization and mapping algorithm of coal mine underground considering image enhancement[J]. Journal of Mine Automation,2023,49(5):74-81. doi: 10.13272/j.issn.1671-251x.2022090025

|

| [1] |
王龙. 基于航迹推算的井下人员定位关键算法研究[D]. 徐州: 中国矿业大学, 2015.
WANG Long. Study on the key algorithms of underground personnel positioning based on dead reckoning[D]. Xuzhou: China University of Mining and Technology, 2015.
|
| [2] |
葛世荣,胡而已,裴文良. 煤矿机器人体系及关键技术[J]. 煤炭学报,2020,45(1):455-463.
GE Shirong,HU Eryi,PEI Wenliang. Classification system and key technology of coal mine robot[J]. Journal of China Coal Society,2020,45(1):455-463.
|
| [3] |
杨必胜,梁福逊,黄荣刚. 三维激光扫描点云数据处理研究进展、挑战与趋势[J]. 测绘学报,2017,46(10):1509-1516.
YANG Bisheng,LIANG Fuxun,HUANG Ronggang. Progress,challenges and perspectives of 3D LiDAR point cloud processing[J]. Acta Geodaetica et Cartographica Sinica,2017,46(10):1509-1516.
|
| [4] |
吴东金,夏林元. 面向室内WLAN定位的动态自适应模型[J]. 测绘学报,2015,44(12):1322-1330.
WU Dongjin,XIA Linyuan. Dynamic adaptive model for indoor WLAN localization[J]. Acta Geodaetica et Cartographica Sinica,2015,44(12):1322-1330.
|
| [5] |
符世琛,李一鸣,杨健健,等. 基于超宽带技术的掘进机自主定位定向方法研究[J]. 煤炭学报,2015,40(11):2603-2610.
FU Shichen,LI Yiming,YANG Jianjian,et al. Research on autonomous positioning and orientation method of roadheader based on ultra wide-band technology[J]. Journal of China Coal Society,2015,40(11):2603-2610.
|
| [6] |
李论,张著洪,丁恩杰,等. 基于RSSI的煤矿巷道高精度定位算法研究[J]. 中国矿业大学学报,2017,46(1):183-191,200.
LI Lun,ZHANG Zhuhong,DING Enjie,et al. Precision positioning algorithm in coal mine tunnel based on RSSI[J]. Journal of China University of Mining & Technology,2017,46(1):183-191,200.
|
| [7] |
马宏伟,王岩,杨林. 煤矿井下移动机器人深度视觉自主导航研究[J]. 煤炭学报,2020,45(6):2193-2206.
MA Hongwei,WANG Yan,YANG Lin. Research on depth vision based mobile robot autonomous navigation in underground coal mine[J]. Journal of China Coal Society,2020,45(6):2193-2206.
|
| [8] |
齐广峰,吕军锋. MEMS惯性技术的发展及应用[J]. 电子设计工程,2015,23(1):87-89,92.
QI Guangfeng,LYU Junfeng. Evolution and application of MEMS inertial technology[J]. Electronic Design Engineering,2015,23(1):87-89,92.
|
| [9] |
江传龙,黄宇昊,韩超,等. 井下巡检无人机系统设计及定位与避障技术[J]. 机械设计与研究,2021,37(4):38-42,48.
JIANG Chuanlong,HUANG Yuhao,HAN Chao,et al. Design of underground inspection UAV system and study of positioning and obstacle avoidance[J]. Machine Design & Research,2021,37(4):38-42,48.
|
| [10] |
FUENTES-PACHECO J,RUIZ-ASCENCIO J,RENDÓN-MANCHA J M. Visual simultaneous localization and mapping:a survey[J]. Artificial Intelligence Review,2015,43(1):55-81. doi: 10.1007/s10462-012-9365-8
|
| [11] |
DURRANT-WHYTE H,BAILEY T. Simultaneous localization and mapping:part I[J]. IEEE Robotics & Automation Magazine,2006,13(2):99-110.
|
| [12] |
丁文东,徐德,刘希龙,等. 移动机器人视觉里程计综述[J]. 自动化学报,2018,44(3):385-400.
DING Wendong,XU De,LIU Xilong,et al. Review on visual odometry for mobile robots[J]. Acta Automatica Sinica,2018,44(3):385-400.
|
| [13] |
尚磊,王杰,宋尊师,等. 基于单目ORB−SLAM2算法的煤矿搜救机器人定位研究[J]. 机床与液压,2020,48(11):49-52.
SHANG Lei,WANG Jie,SONG Zunshi,et al. Research on the localization of the coal mine search and rescue robot based on the monocular ORB-SLAM2 algorithm[J]. Machine Tool & Hydraulics,2020,48(11):49-52.
|
| [14] |
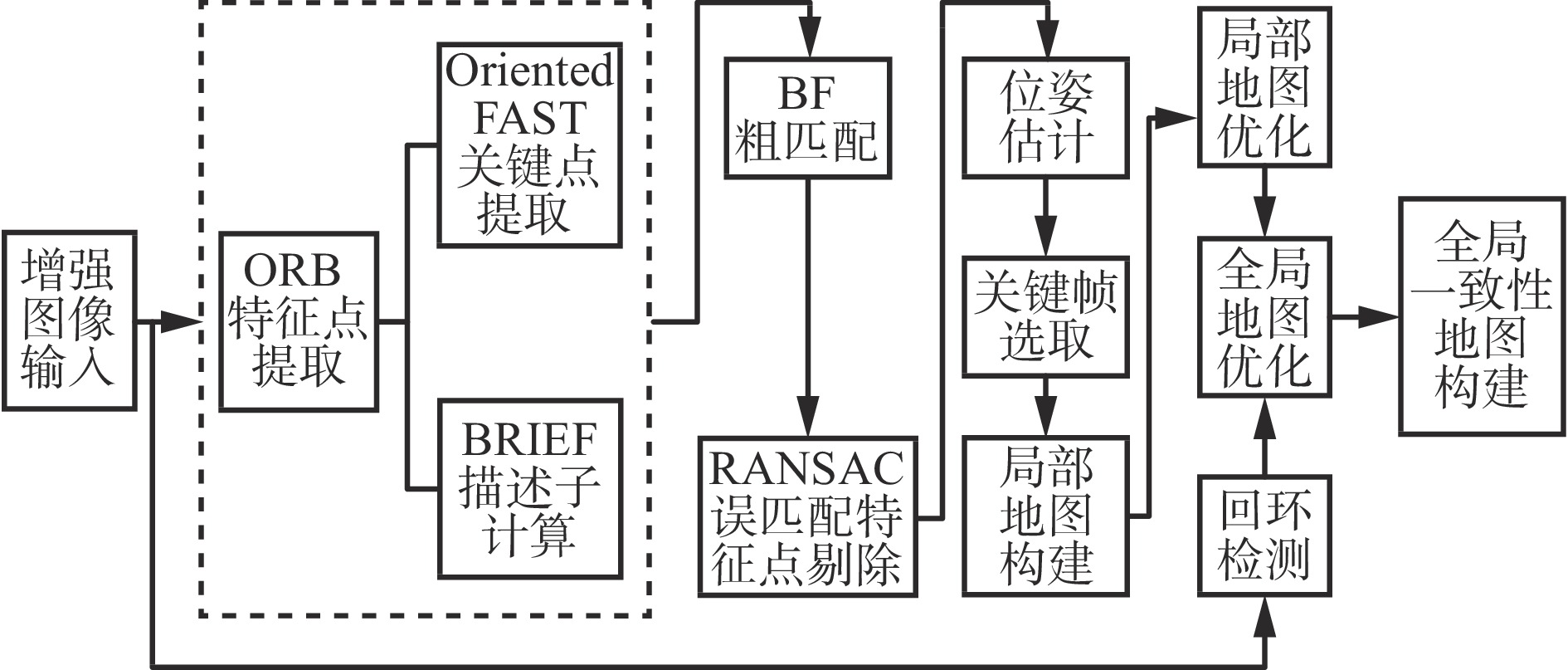
MUR-ARTAL R,TARDOS J D. ORB-SLAM2:an open-source slam system for monocular,stereo,and RGB-D cameras[J]. IEEE Transactions on Robotics,2017,33(5):1255-1262.
|
| [15] |
ZHU Daixian,JI Kangkang,WU Dong,et al. A coupled visual and inertial measurement units method for locating and mapping in coal mine tunnel[J]. Sensors,2022,22(19):7437. doi: 10.3390/s22197437
|
| [16] |
朱礼义. 矿井图像增强和井下人员检测算法的研究[D]. 徐州: 中国矿业大学, 2019.
ZHU Liyi. Research on mine image enhancement and underground personnel detection[D]. Xuzhou: China University of Mining and Technology, 2019.
|
| [17] |
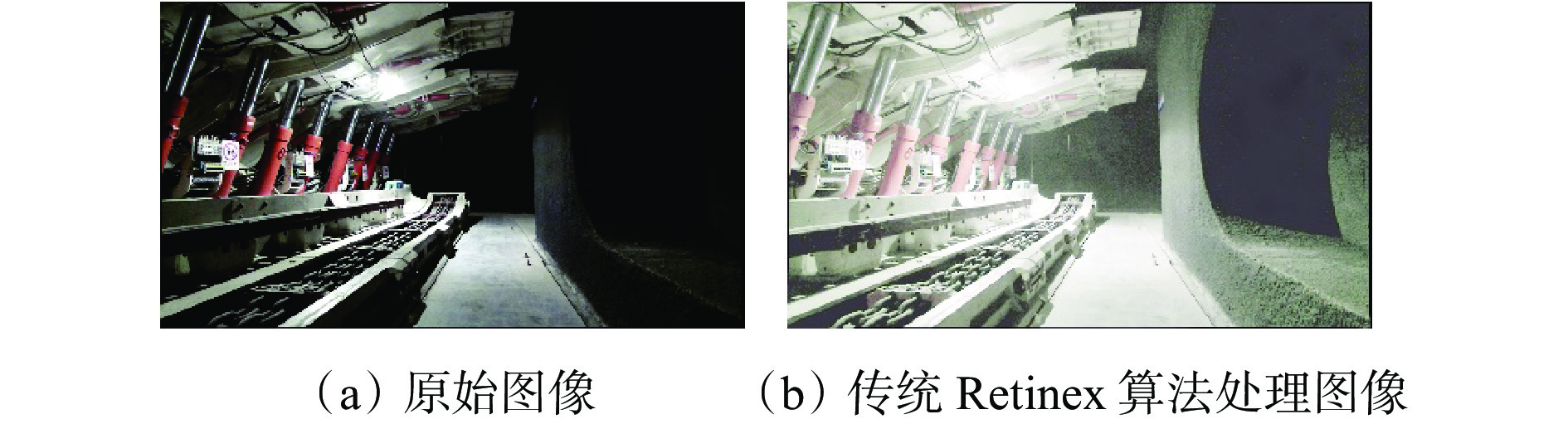
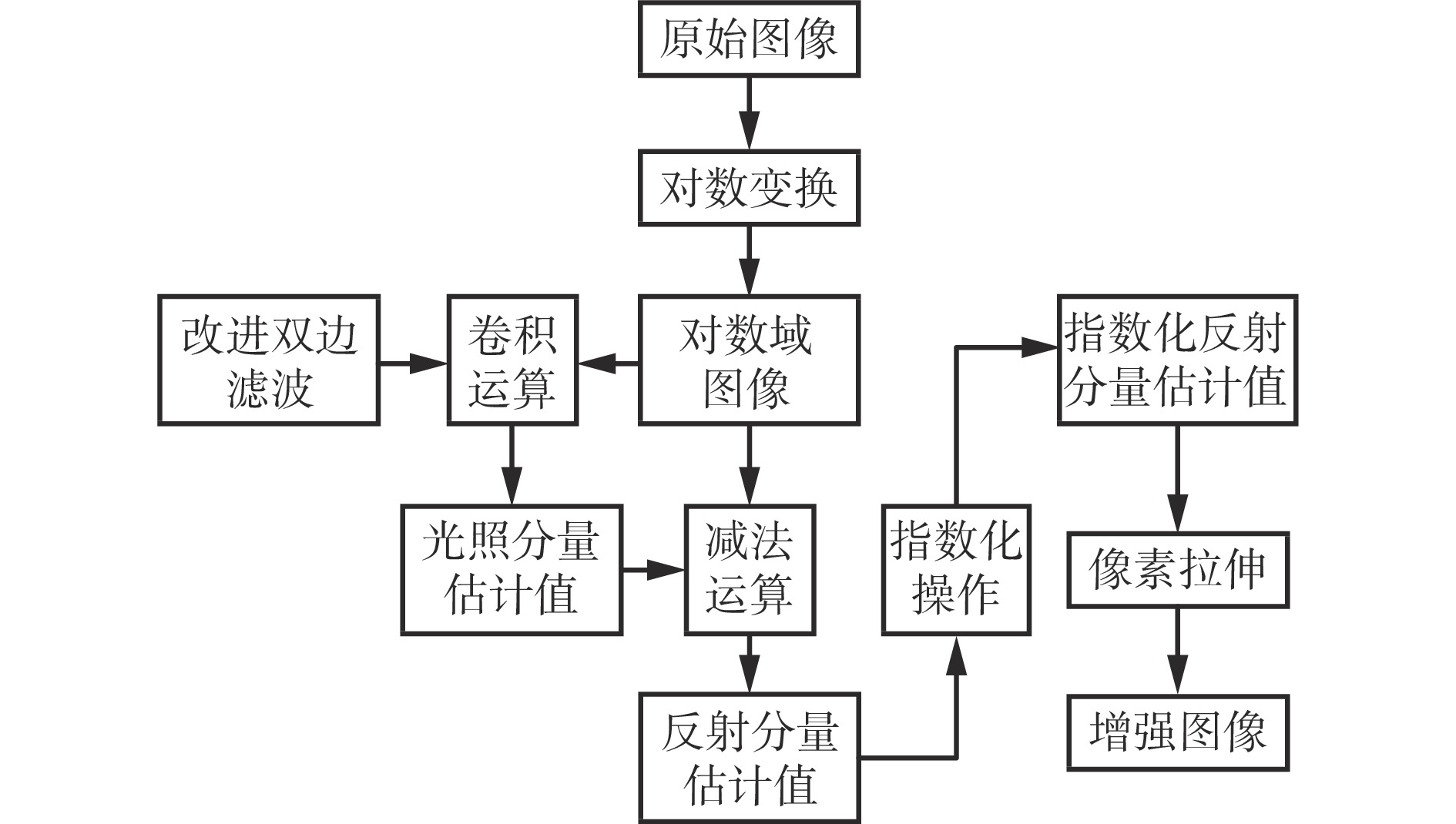
洪炎,朱丹萍,龚平顺. 基于TopHat加权引导滤波的Retinex矿井图像增强算法[J]. 工矿自动化,2022,48(8):43-49.
HONG Yan,ZHU Danping,GONG Pingshun. Retinex mine image enhancement algorithm based on TopHat weighted guided filtering[J]. Journal of Mine Automation,2022,48(8):43-49.
|
| [18] |
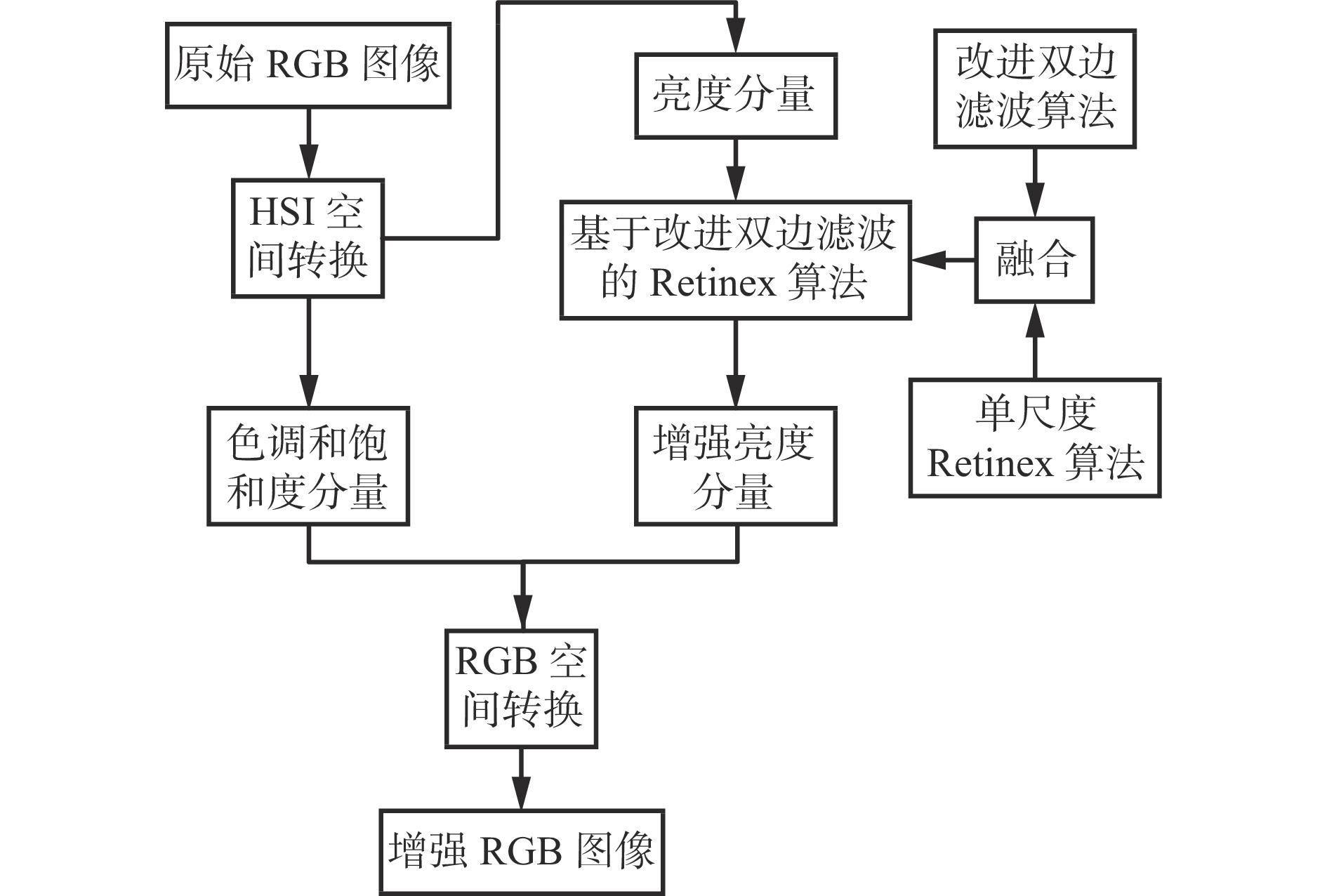
张立亚,郝博南,孟庆勇,等. 基于HSV空间改进融合Retinex算法的井下图像增强方法[J]. 煤炭学报,2020,45(增刊1):532-540.
ZHANG Liya,HAO Bonan,MENG Qingyong,et al. Method of image enhancement in coal mine based on improved retex fusion algorithm in HSV space[J]. Journal of China Coal Society,2020,45(S1):532-540.
|
| [19] |
谢凤英,汤萌,张蕊. 基于Retinex的图像增强方法综述[J]. 数据采集与处理,2019,34(1):1-11.
XIE Fengying,TANG Meng,ZHANG Rui. Review of image enhancement algorithms based on Retinex[J]. Journal of Data Acquisition and Processing,2019,34(1):1-11.
|
| [20] |
GARCIA V, DEBREUVE E, NIELSEN F, et al. K-nearest neighbor search: Fast GPU-based implementations and application to high-dimensional feature matching[C]. IEEE International Conference on Image Processing, Hong Kong, 2010: 3757-3760.
|
| [21] |
STURM J, ENGELHARD N, ENDRES F, et al. A benchmark for the evaluation of RGBD SLAM systems[C]. IEEE/RSJ International Conference on Intelligent Robots and Systems, New York, 2012: 573-580.
|
Figures(10) / Tables(5)
Supported by:
Beijing Renhe Information Technology Co. Ltd.
Visits:



 DownLoad:
DownLoad: