Abstract:
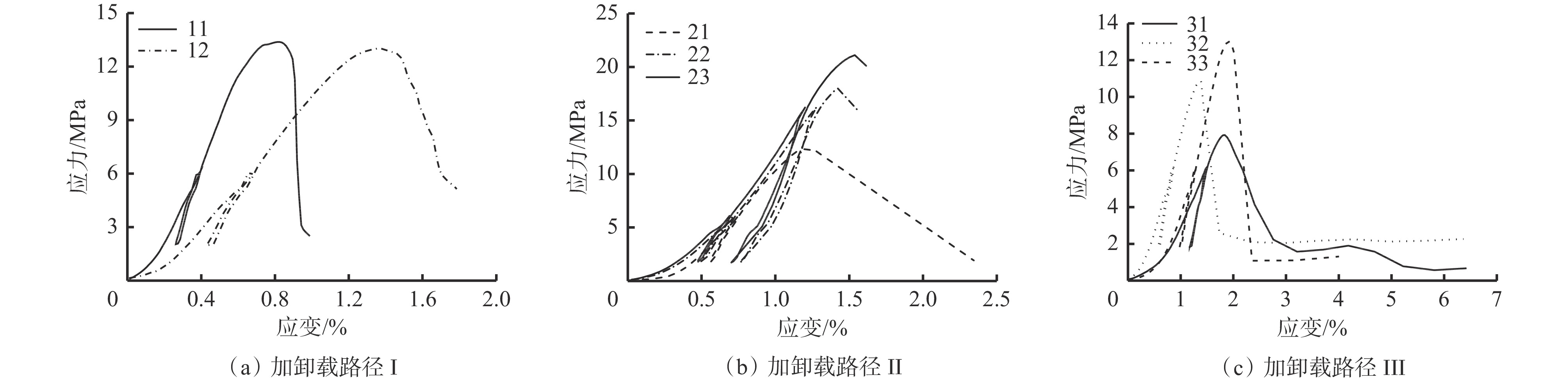
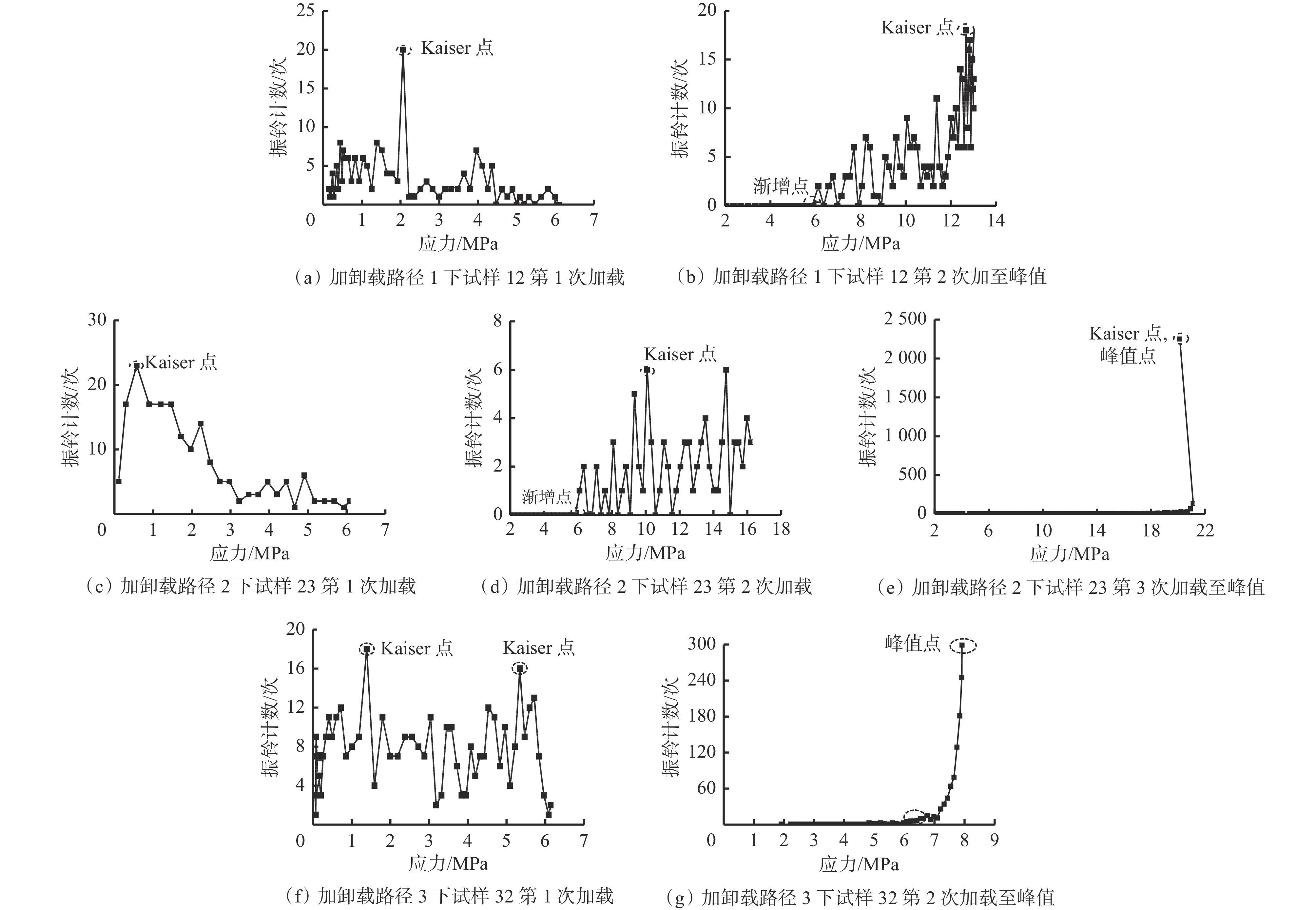
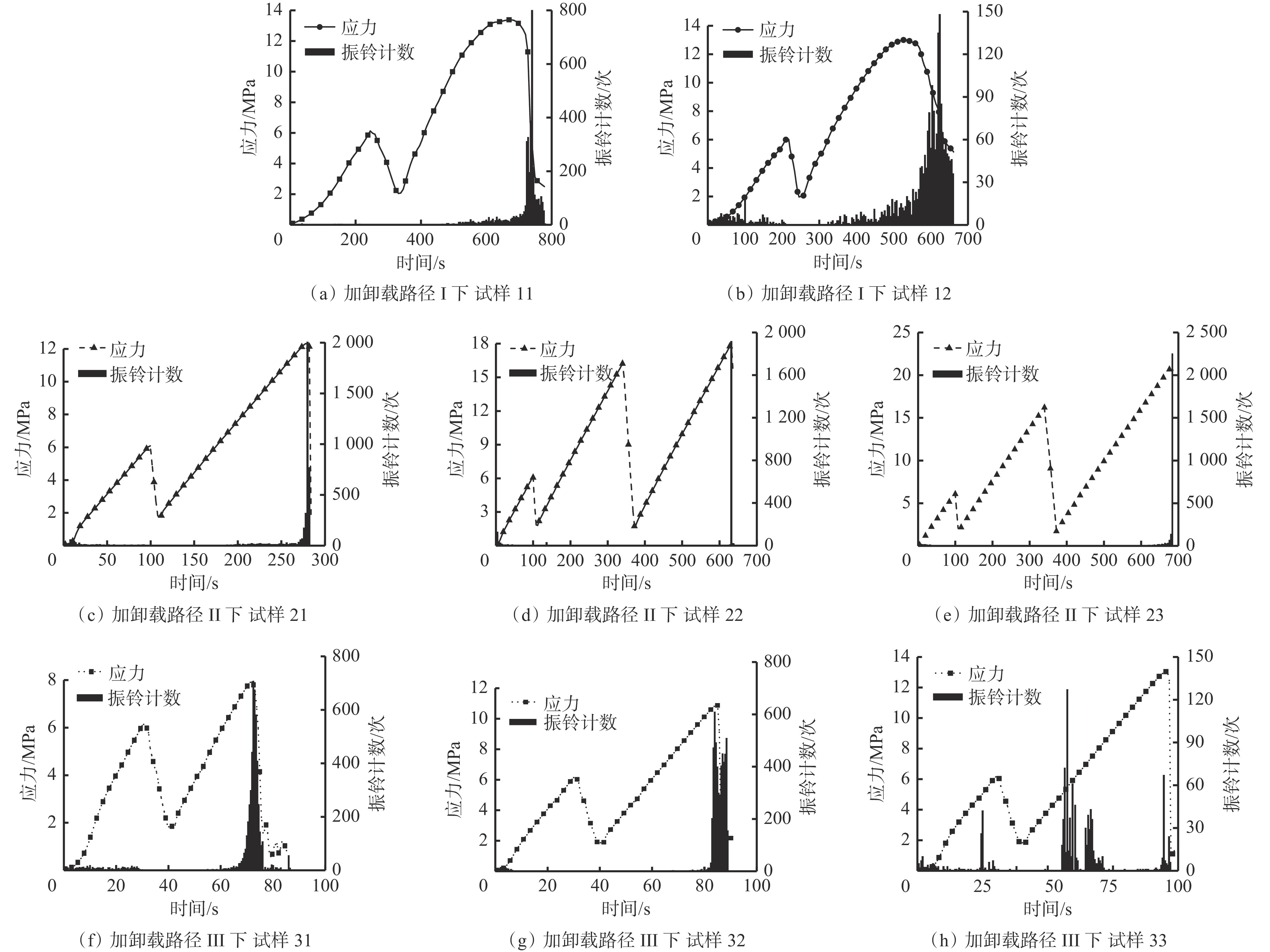
The loading-unloading effect induced by repeated mining disturbance is an important inducement to cause the rock mass failure in roadway engineering. However, there is a lack of research on the mechanical response of the widely distributed weakly cemented sandy mudstone in west China under loading and unloading conditions. In order to solve this problem, the sandy mudstone in borehole BK209 of Shendong Buertai Coal Mine of National Energy Group is taken as the research object, and the uniaxial graded loading and unloading test scheme is adopted (I, II and III loading and unloading paths are set, wherein the loading and unloading path I adopts displacement control, and the loading and unloading paths II and III adopt load control). This paper studies the mechanical and acoustic emission (AE) characteristics of sandy mudstone under different loading and unloading paths. The result shows the following four points. ① Under the loading and unloading path I, the stress of the sample drops rapidly after the stress peak, showing the characteristics of brittleness. Under the loading and unloading path II, the stress drop after the peak stress of the sample is limited and the stress has a certain residual strength. Under loading and unloading path III, the stress of the sample falls after the peak stress, showing certain ductility characteristics. ② The shorter the loading and unloading path, the greater the increase of elastic modulus in the unloading section. The main reason is that the detritus is produced by shear slip in the interface of the new fracture during loading process. When the unloading path is shorts, the detritus falling off under tensile stress fully fills the nearby gap. Therefore, the friction capacity between the fracture surfaces becomes stronger. ③ In the first loading stage, the AE ringing count under the path I is in a symmetrical change of first increasing and then decreasing. The AE ringing count under the path II is in a left-biased peak change. And the AE ringing count under the path III is in a fluctuation change of increasing and decreasing, and the fluctuation in the middle is large. In the second loading stage, under the load paths I and III, when the stress increases to near the peak value and reaches the yield limit of sandy mudstone, the AE ringing count increases sharply and Kaiser point appears. During the last loading to the peak value, the AE ringing count under path I first occurs uniformly and continuously, and then increases gradually. The AE ringing counts under paths II and III occur uniformly and continuously, and the stress near the peak increases in a leaping manner. ④ In the first loading stage, the AE ringing count is less because of the low stress, and the AE is in relatively quiet period. In the unloading stage, there is basically no ring count, and the AE is in intermittent period. With the increase of stress and loading and unloading times, the AE ringing count increases relatively. The AE is in a fluctuating period. During the last loading to the peak value, the sandy mudstone is in the destruction stage, and the AE ringing count increases sharply. The AE enters the active period.
CAO Jinzhong, YANG Zhiliang, WANG Wenjie. Study on acoustic emission characteristics of sandy mudstone under uniaxial loading and unloading of Buertai Coal Mine[J]. Journal of Mine Automation,2022,48(6):147-153, 158. doi: 10.13272/j.issn.1671-251x.2021110046.