

Research on path planning of parallel gangue selection robot
-
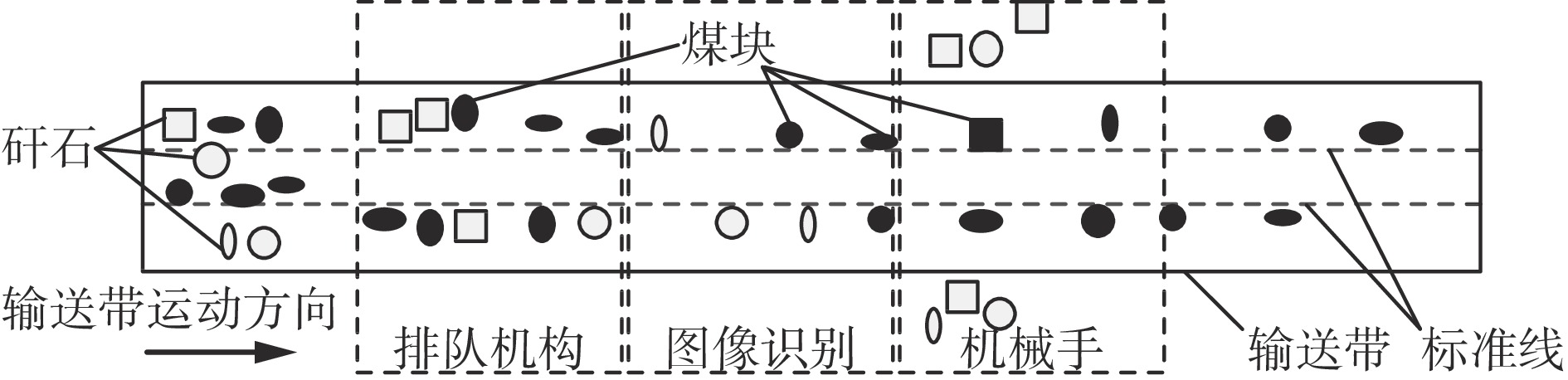
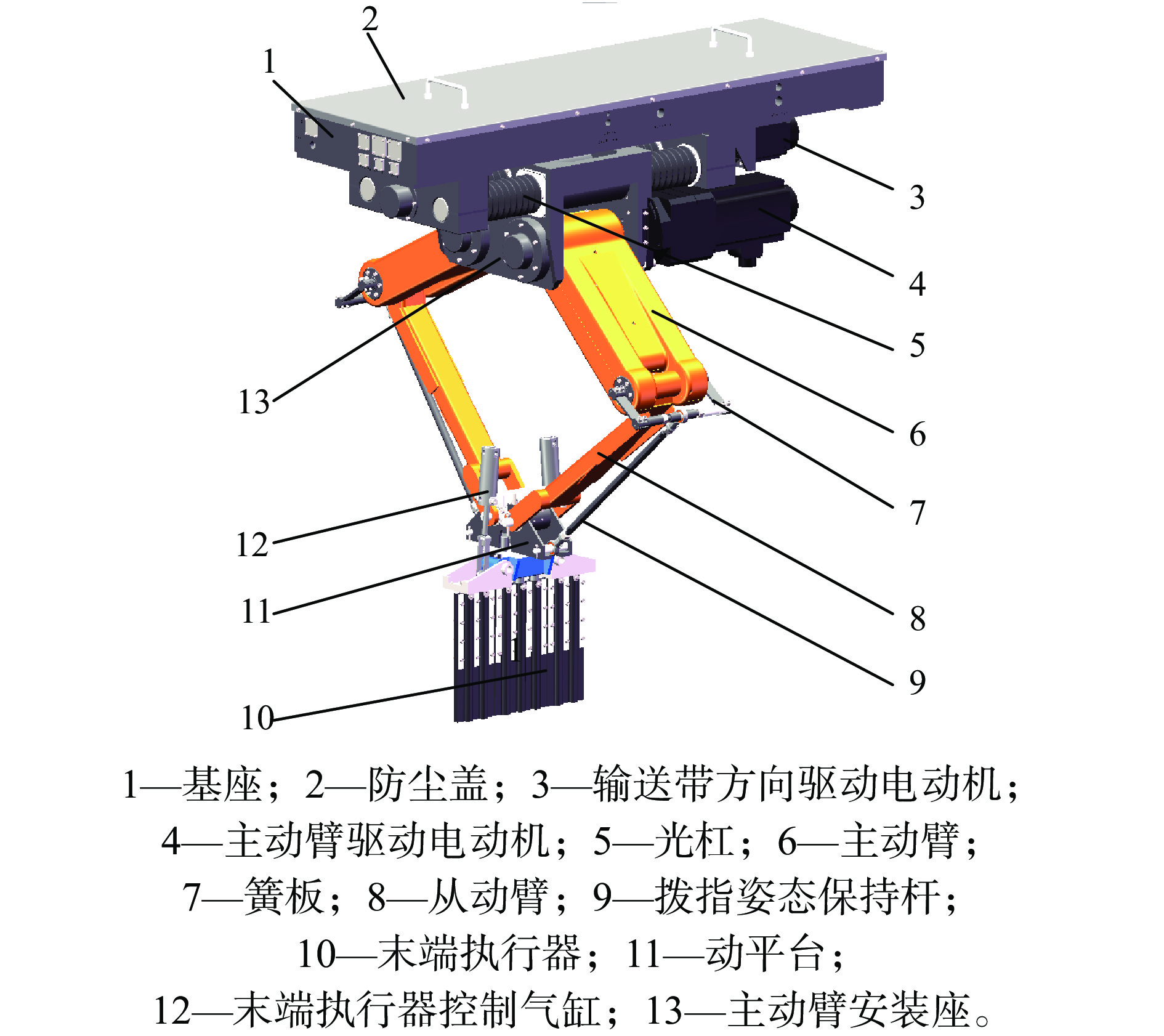
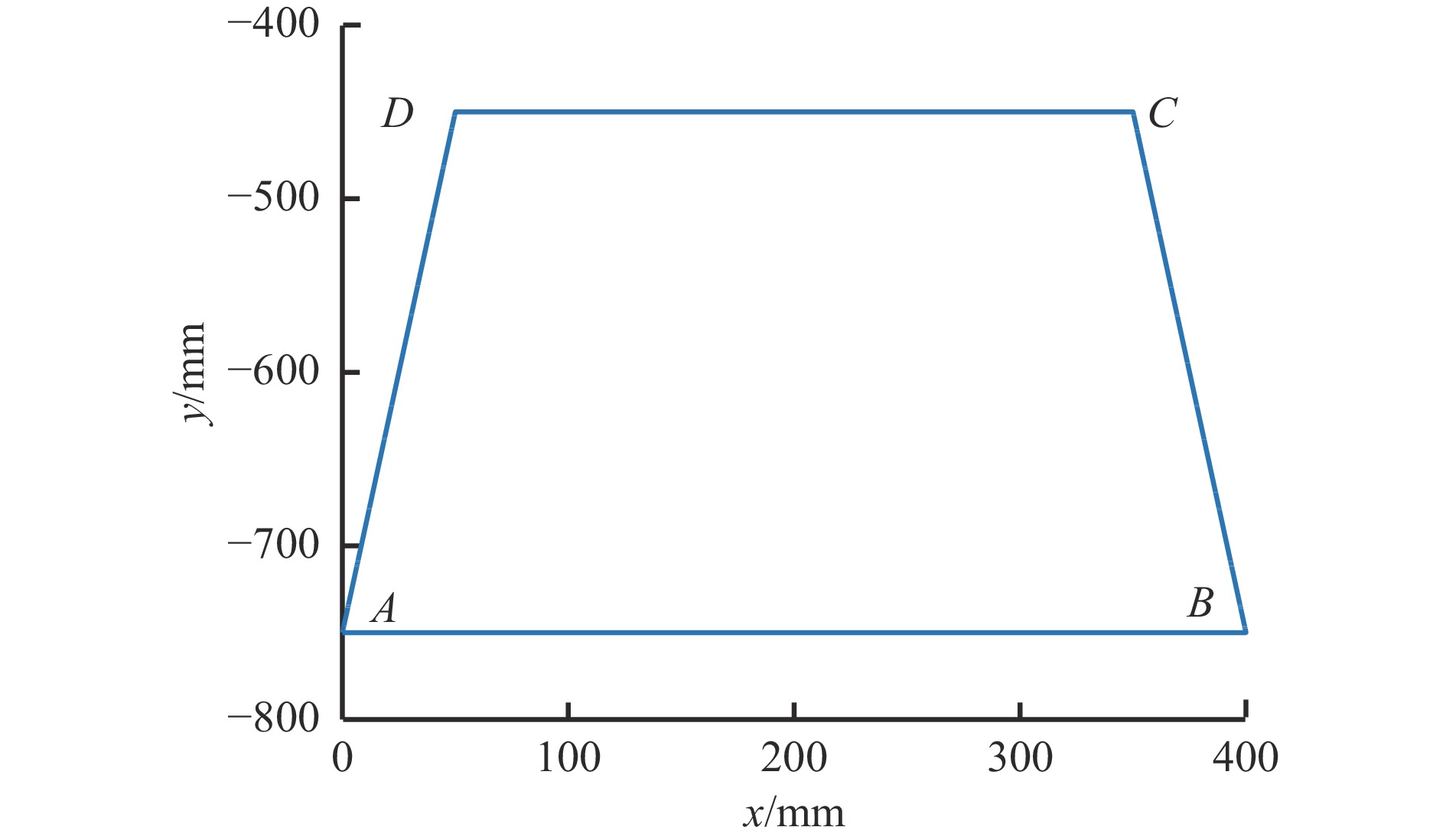
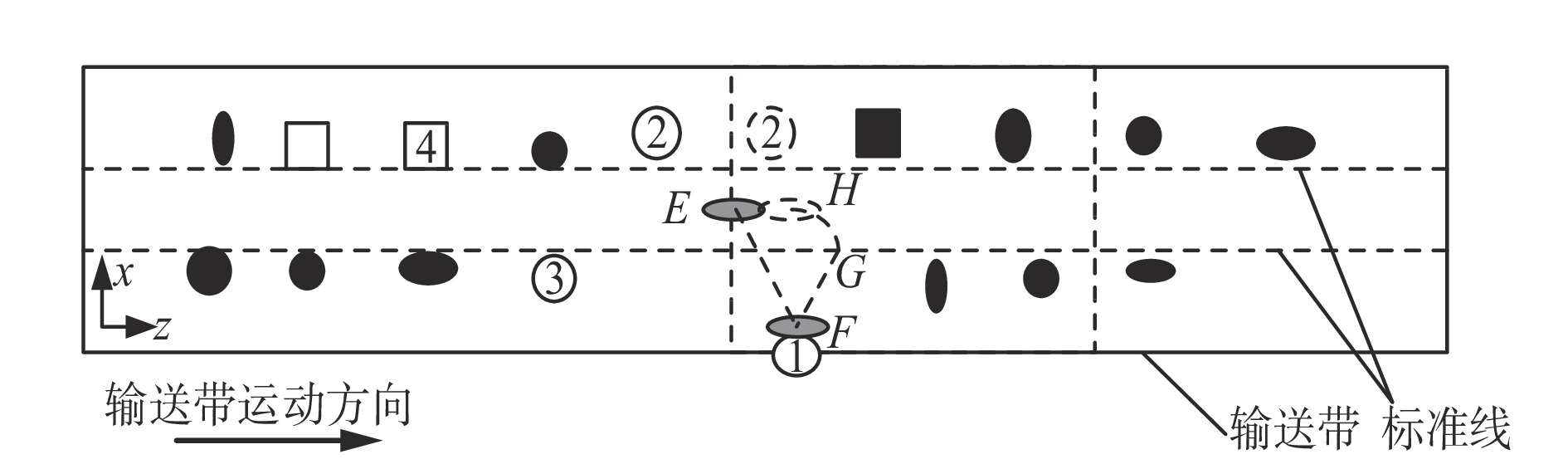
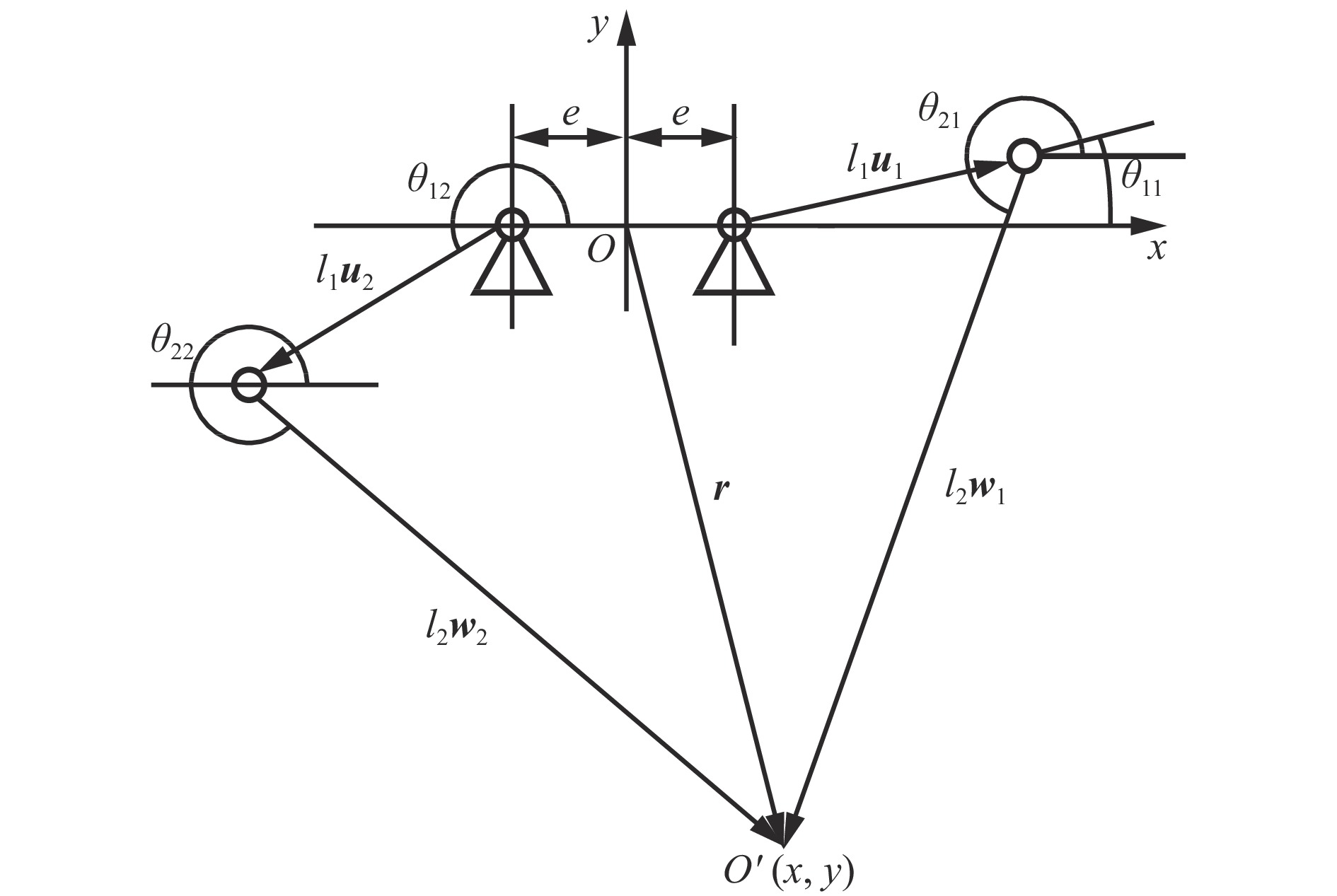
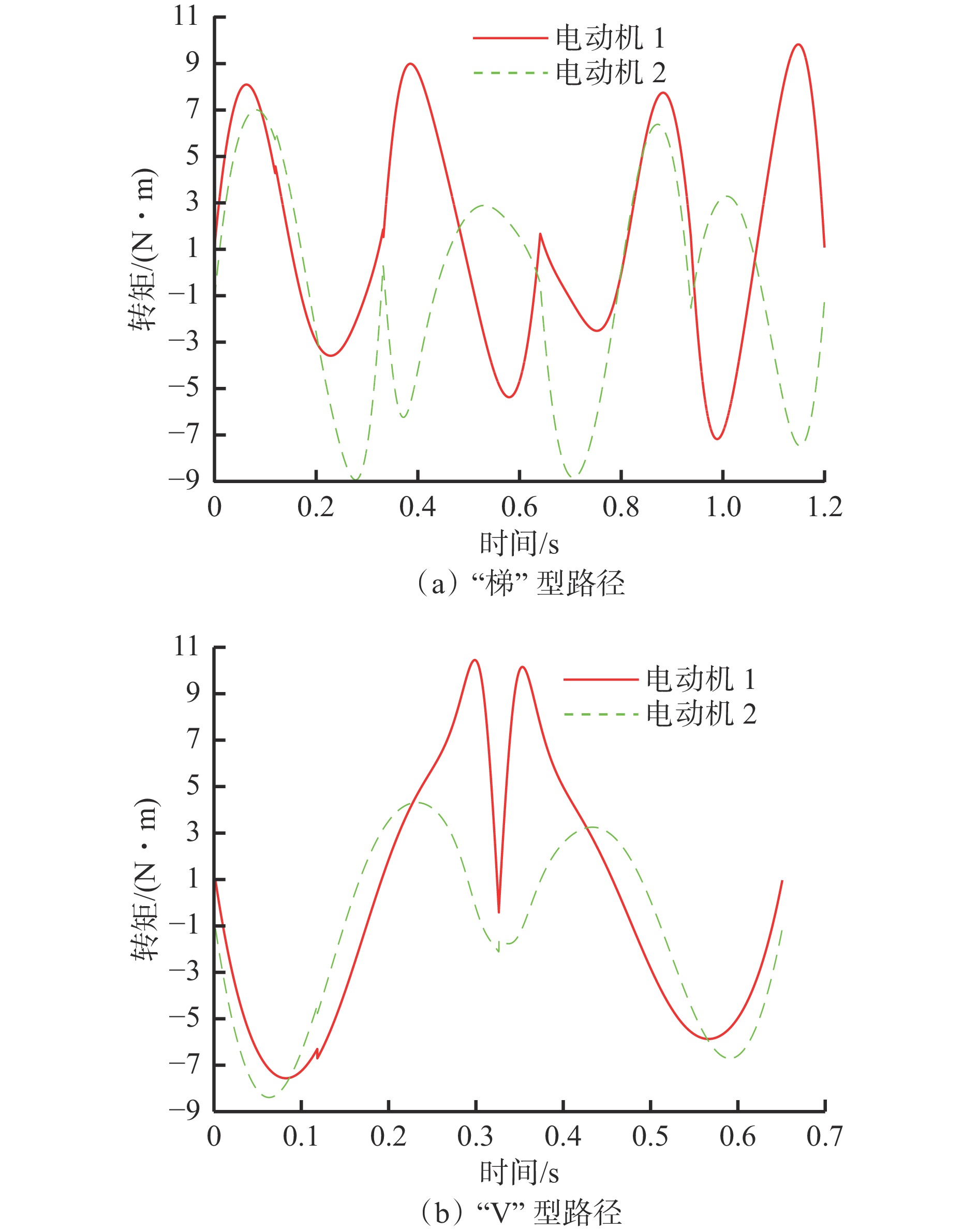
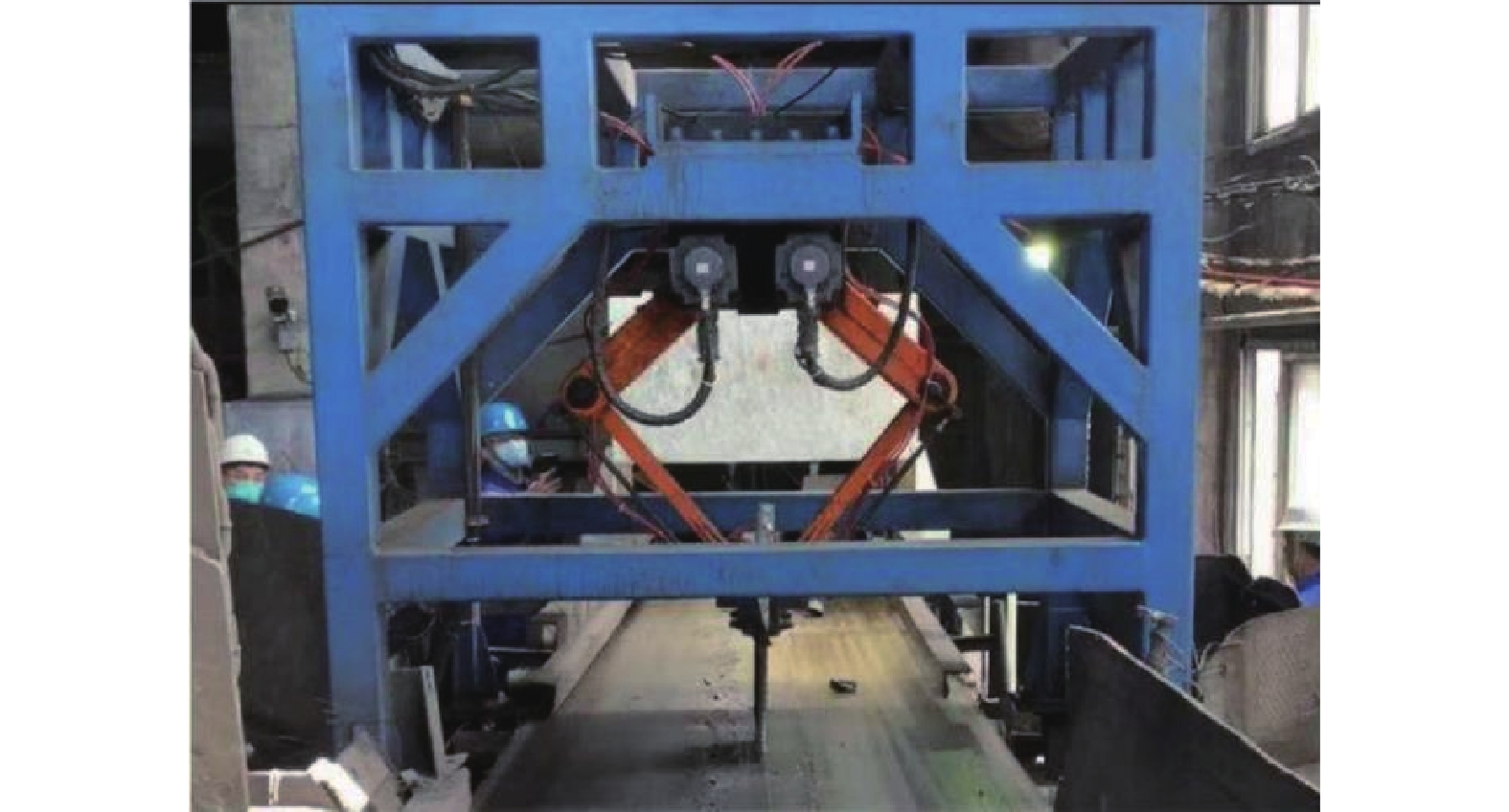
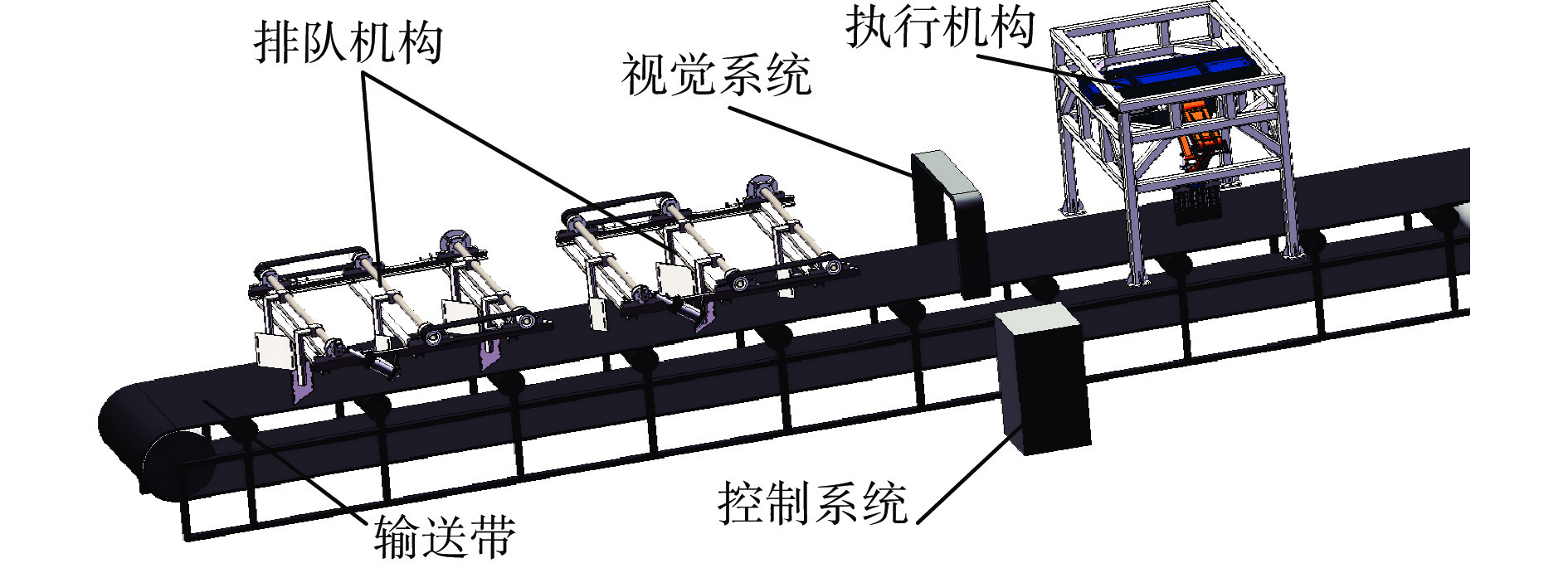
摘要: 目前煤矸石分选机械手多采用串联式,与串联机械手相比,并联机械手能够在短时间内达到较高的运动速度,且负载能力更强,更适用于大质量煤矸石分选。以并联式选矸机器人为研究对象,对其并联机械手的“梯”型路径规划与“V”型路径规划2种动态分选路径规划方法进行对比分析。“梯”型路径规划:机械手末端执行器将矸石推出输送带后,先向上抬起一定距离,再完成回程运动。“V”型路径规划:机械手末端执行器将矸石推出输送带后,先回到标准线内,再快速运动到与下一个目标矸石平行的位置,完成1个运动周期。通过建立并联机械手动力学模型,探究机械手在沿2种路径运动时驱动电动机转矩的变化情况,计算在转矩满足要求的前提下,沿2种路径完成1个运动周期所用的时间,进而对比机械手沿2种路径的作业效率。仿真结果表明,采用“梯”型路径和“V”型路径完成1个运动周期所用时间分别为1.2,0.65 s,采用“V”型路径所用时间较短,选矸效率较高。现场应用结果表明,采用“V”型路径、“梯”型路径时,平均矸石分选率分别为94.23%和88.28%,且采用“V”型路径时的总用时比采用“梯”型路径时少近19%,选矸效率更高。Abstract: At present, the coal gangue selection manipulator is mostly used in series. Compared with the series manipulator, the parallel manipulator can achieve higher movement speed in a short time, and the load capacity is stronger. Therefore, it is more suitable for the selection of heavy coal gangue. Taking the parallel gangue selection robot as the research object, the two dynamic sorting path planning methods of "ladder" path planning and "V" path planning of parallel manipulator are compared and analyzed. "Ladder" path planning: after the end effector of the manipulator pushes the gangue out of the conveyor belt, it first lifts up a certain distance, and then completes the return movement. "V" path planning: after the end effector of the manipulator pushes the gangue out of the conveyor belt, it first returns to the standard line, and then quickly moves to the position parallel to the next target gangue, completing one movement cycle. By establishing the mechanical model of the parallel manipulator, the torque variation of the drive motor is explored when the manipulator moved along the two paths. The time for completing a movement cycle along the two paths is calculated on the premise that the torque met the requirements. And the working efficiency of the manipulator along the two paths is compared. The simulation results show that the time taken to complete a movement cycle along "ladder" path and "V" path is 1.2, 0.65 s respectively. The "V" path takes a shorter time and has a higher gangue selection efficiency. The site application results show that the average gangue selection rate is 94.23% and 88.28% respectively when the "V" path and the "ladder" path are adopted. The total time of the "V" path is nearly 19% less than that of the "ladder" path, and the gangue selection efficiency is higher.
-
Key words:
- gangue selection robot /
- parallel manipulator /
- end effector /
- path planning /
- "ladder" path /
- "V" path
-
表 1 2种路径规划方法测试结果
Table 1. Test results of 2 path planning methods
序号 路径规
划方法总用
时/s识别
数/块分选
数/块矸石分
选率/%1 “梯”型 210 198 178 89.90 “V”型 185 189 182 96.30 2 “梯”型 209 186 165 88.70 “V”型 179 196 191 97.45 3 “梯”型 257 195 168 86.15 “V”型 189 182 164 90.12 4 “梯”型 239 189 167 88.36 “V”型 176 187 174 93.04  下载: 导出CSV
下载: 导出CSV
-
[1] 刘强. 煤炭洗选发展中存在的问题和对策[J]. 中小企业管理与科技,2017(36):163-164.LIU Qiang. Problems and countermeasures in the development of coal washing[J]. Management & Technology of SME,2017(36):163-164. [2] 刘学雷. 我国选煤技术发展现状及趋势分析[J]. 选煤技术,2018,46(6):12-15. doi: 10.16447/j.cnki.cpt.2018.06.003LIU Xuelei. Status quo and developing trend of China's coal preparation technology[J]. Coal Preparation Technology,2018,46(6):12-15. doi: 10.16447/j.cnki.cpt.2018.06.003 [3] 陆军. 煤矸石发电是扩大煤矸石综合利用的有效途径[J]. 中国煤炭,2001,27(7):36-37,42. doi: 10.3969/j.issn.1006-530X.2001.07.013LU Jun. Low grade coal fired power generation:an effective way to large scale comprehensive utilization of low grade coal[J]. China Coal,2001,27(7):36-37,42. doi: 10.3969/j.issn.1006-530X.2001.07.013 [4] 张信龙,唐利刚,张瑞文,等. 常村煤矿井下煤矸石分选工艺设计[J]. 煤炭技术,2015,34(1):323-324. doi: 10.13301/j.cnki.ct.2015.01.113ZHANG Xinlong,TANG Ligang,ZHANG Ruiwen,et al. Design of underground coal-gangue separation process of Changcun Coal Mine[J]. Coal Technology,2015,34(1):323-324. doi: 10.13301/j.cnki.ct.2015.01.113 [5] 王国法,杜毅博. 智慧煤矿与智能化开采技术的发展方向[J]. 煤炭科学技术,2019,47(1):1-10. doi: 10.13199/j.cnki.cst.2019.01.001WANG Guofa,DU Yibo. Development direction of intelligent coal mine and intelligent mining technology[J]. Coal Science and Technology,2019,47(1):1-10. doi: 10.13199/j.cnki.cst.2019.01.001 [6] 庞义辉,王国法,任怀伟. 智慧煤矿主体架构设计与系统平台建设关键技术[J]. 煤炭科学技术,2019,47(3):35-42. doi: 10.13199/j.cnki.cst.2019.03.005PANG Yihui,WANG Guofa,REN Huaiwei. Main structure design of intelligent coal mine and key technology of system platform construction[J]. Coal Science and Technology,2019,47(3):35-42. doi: 10.13199/j.cnki.cst.2019.03.005 [7] 商德勇,章林,牛艳奇,等. 煤矸分拣机器人设计与关键技术分析[J]. 煤炭科学技术,2022,50(3):232-238. doi: 10.13199/j.cnki.cst.ZN20-040SHANG Deyong,ZHANG Lin,NIU Yanqi,et al. Design and key technology analysis of coal-gangue sorting robot[J]. Coal Science and Technology,2022,50(3):232-238. doi: 10.13199/j.cnki.cst.ZN20-040 [8] 朱子祺,李创业,代伟. 基于G−RRT*算法的煤矸石分拣机器人路径规划[J]. 工矿自动化,2022,48(3):55-62.ZHU Ziqi,LI Chuangye,DAI Wei. Path planning of coal gangue sorting robot based on G-RRT* algorithm[J]. Journal of Mine Automation,2022,48(3):55-62. [9] 曹现刚,吴旭东,王鹏,等. 面向煤矸分拣机器人的多机械臂协同策略[J]. 煤炭学报,2019,44(增刊2):763-774. doi: 10.13225/j.cnki.jccs.2019.0734CAO Xiangang,WU Xudong,WANG Peng,et al. Collaborative strategy of multi-manipulator for coal-gangue sorting robot[J]. Journal of China Coal Society,2019,44(S2):763-774. doi: 10.13225/j.cnki.jccs.2019.0734 [10] 曹现刚,费佳浩,王鹏,等. 基于多机械臂协同的煤矸分拣方法研究[J]. 煤炭科学技术,2019,47(4):7-12. doi: 10.13199/j.cnki.cst.2019.04.002CAO Xiangang,FEI Jiahao,WANG Peng,et al. Study on coal-gangue sorting method based on multi-manipulator collaboration[J]. Coal Science and Technology,2019,47(4):7-12. doi: 10.13199/j.cnki.cst.2019.04.002 [11] 曹现刚,李宁,王鹏,等. 基于比例导引法的机械臂拣矸过程轨迹规划方法研究[J]. 煤炭工程,2019,51(5):154-158.CAO Xiangang,LI Ning,WANG Peng,et al. Research and simulation on priority and path planning of manipulator gangue picking[J]. Coal Engineering,2019,51(5):154-158. [12] 曹现刚,刘思颖,王鹏,等. 面向煤矸分拣机器人的煤矸识别定位系统研究[J]. 煤炭科学技术,2022,50(1):237-246.CAO Xiangang,LIU Siying,WANG Peng,et al. Research on coal gangue identification and positioning system based on coal-gangue sorting robot[J]. Coal Science and Technology,2022,50(1):237-246. [13] 马宏伟,孙那新,张烨,等. 煤矸石分拣机器人动态目标稳定抓取轨迹规划[J]. 工矿自动化,2022,48(4):20-30. doi: 10.13272/j.issn.1671-251x.2021110050MA Hongwei,SUN Naxin,ZHANG Ye,et al. Track planning of coal gangue sorting robot for dynamic target stable grasping[J]. Journal of Mine Automation,2022,48(4):20-30. doi: 10.13272/j.issn.1671-251x.2021110050 [14] 王鹏,曹现刚,马宏伟,等. 基于余弦定理−PID的煤矸石分拣机器人动态目标稳准抓取算法[J]. 煤炭学报,2020,45(12):4240-4247. doi: 10.13225/j.cnki.jccs.2019.1565WANG Peng,CAO Xiangang,MA Hongwei,et al. Dynamic target steady and accurate grasping algorithm of gangue sorting robot based on cosine theorem-PID[J]. Journal of China Coal Society,2020,45(12):4240-4247. doi: 10.13225/j.cnki.jccs.2019.1565 [15] 夏晶,张昊,周世宁,等. 煤矸分拣机器人动态拣取避障路径规划[J]. 煤炭学报,2021,46(增刊1):570-577. doi: 10.13225/j.cnki.jccs.2020.1448XIA Jing,ZHANG Hao,ZHOU Shining,et al. Dynamic picking and obstacle avoidance path planning of coal gangue sorting robot[J]. Journal of China Coal Society,2021,46(S1):570-577. doi: 10.13225/j.cnki.jccs.2020.1448 [16] 江洪,宋勇,隋国成,等. 智能选矸机器人系统的研究与应用[J]. 选煤技术,2020,48(4):81-87. doi: 10.16447/j.cnki.cpt.2020.04.019JIANG Hong,SONG Yong,SUI Guocheng,et al. Study and application of the intelligent robotic gangue picking system[J]. Coal Preparation Technology,2020,48(4):81-87. doi: 10.16447/j.cnki.cpt.2020.04.019 [17] 李奇松. 选矸机械手结构设计与研究[D]. 唐山: 华北理工大学, 2021.LI Qisong. The structural design and research of the gangue separator manipulator[D]. Tangshan: North China University of Science and Technology, 2021. [18] 王铮,戴坚锋,钱振宇,等. 面向传送带作业系统的机器人目标跟踪与抓取策略研究[J]. 计算机测量与控制,2016,24(11):85-90. doi: 10.16526/j.cnki.11-4762/tp.2016.11.025WANG Zheng,DAI Jianfeng,QIAN Zhenyu,et al. Conveyor belt operating system-oriented robot target tracking and grasping strategy research[J]. Computer Measurement & Control,2016,24(11):85-90. doi: 10.16526/j.cnki.11-4762/tp.2016.11.025 [19] 赵明辉. 双臂并联煤矸石分拣机器人及其轨迹规划研究[J]. 工矿自动化,2020,46(9):57-63. doi: 10.13272/j.issn.1671-251x.2020040059ZHAO Minghui. Research on dual-arm parallel coal gangue sorting robot and its trajectory planning[J]. Industry and Mine Automation,2020,46(9):57-63. doi: 10.13272/j.issn.1671-251x.2020040059 -

 点击查看大图
点击查看大图
图(8) / 表(1)
计量
- 文章访问数: 207
- HTML全文浏览量: 28
- PDF下载量: 43
- 被引次数: 0
