

Belt conveyor deviation and coal stacking monitoring method based on three-dimensional point cloud
-
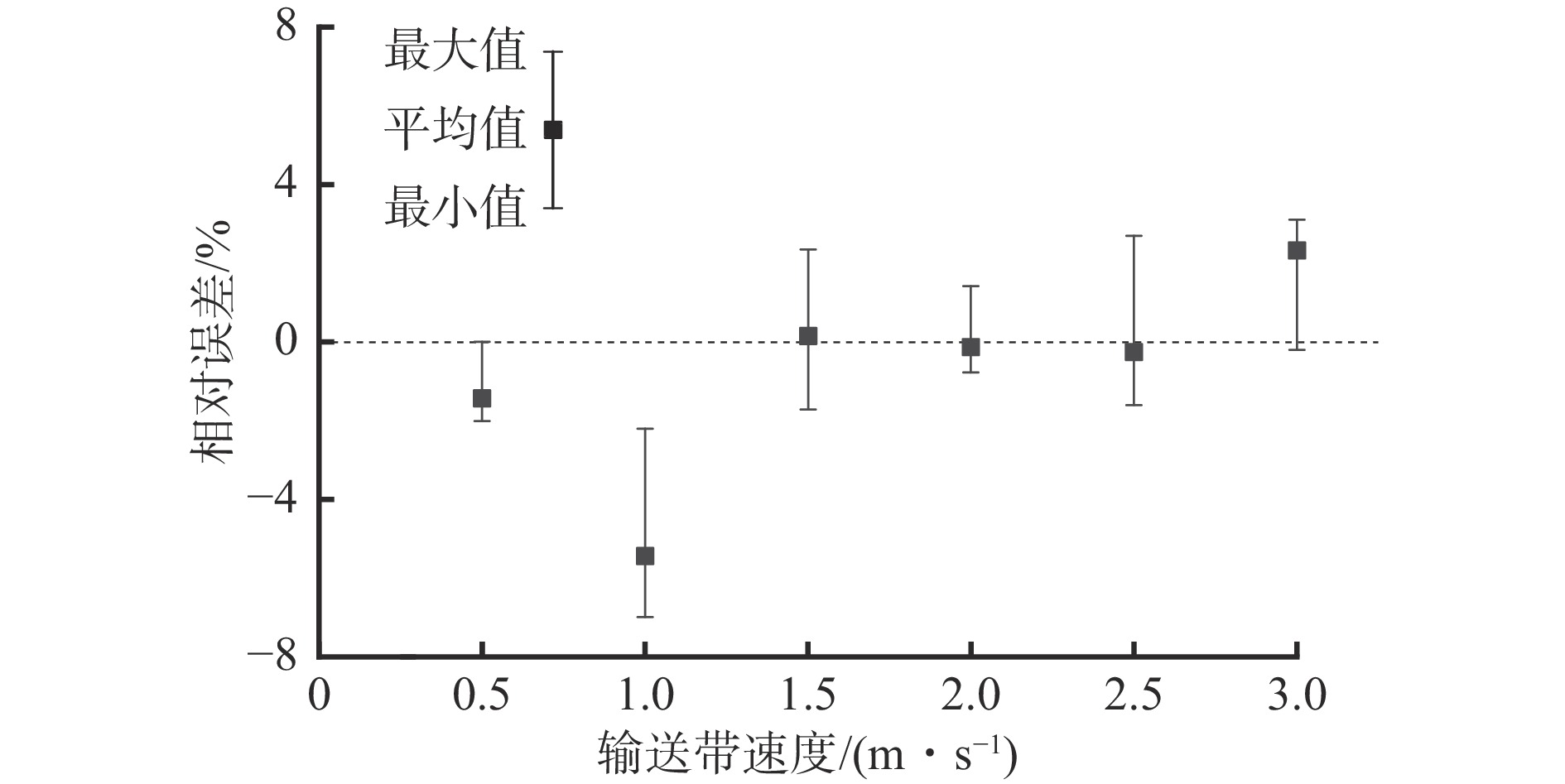
摘要: 输送带跑偏和堆煤是煤矿带式输送机常见故障。传统的接触式输送带跑偏或堆煤检测方法在耐用性、灵敏度、可靠性等方面无法满足煤矿安全生产要求,而基于图像处理方法的检测效果受图像颜色信息影响较大,易产生误识别问题。提出了一种基于三维点云的带式输送机跑偏及堆煤监测方法,采用线激光双目相机采集输送带表面的三维点云数据,通过分析处理点云数据对输送带跑偏和堆煤进行实时监测。在输送带跑偏监测方面,采用欧氏聚类和随机采样一致性算法滤除多余点云数据,提取输送带边沿数据点,并采用均中心表征值表征输送带跑偏程度,以减小输送带宽度方向形状变化对监测的影响。在堆煤监测方面,通过处理点云数据得到煤流等效高度来表征煤流高度和宽度信息,实时评估堆煤程度。搭建了带式输送机跑偏及堆煤监测系统试验台,试验结果表明:输送带速度为0.5~3.0 m/s时,输送带边沿点检测误差为−2.84~1.26 mm,最大误差仅为2.84 mm,说明该系统能可靠实现跑偏故障监测功能,并能准确预测跑偏趋势;在输送带上堆积煤炭样本(质量为14~41 kg,以1 kg为增量),当煤炭质量在14~24 kg及28~41 kg范围内,堆煤检测结果均正确,在25~27 kg范围内存在检测错误情况,原因是该范围内煤炭样本质量较接近触发堆煤报警的临界值27.6 kg。Abstract: Conveyor belt deviation and coal stacking are common faults of belt conveyor in the coal mine. The traditional contact conveyor belt deviation or coal stacking detection methods can not meet the requirements of coal mine safety production in terms of durability, sensitivity and reliability. However, the detection effect based on the image processing method is greatly affected by image color information, which is prone to false identification. The belt conveyor deviation and coal stacking monitoring method based on 3D point cloud is proposed. The 3D point cloud data of the conveyor belt surface is collected by line laser binocular camera. The real-time monitoring of belt deviation and coal stacking is carried out by analyzing and processing the point cloud data. In terms of conveyor belt deviation monitoring, Euclidean clustering and random sampling consistency algorithm are used to filter redundant point cloud data, and extract edge data points of the conveyor belt. The mean central characterization value is used to characterize the degree of conveyor belt deviation, so as to reduce the influence of the shape change in the width direction of the conveyor belt on the monitoring. In terms of coal stacking monitoring, the equivalent height of coal flow is obtained by processing point cloud data. The height and width information of coal flow is characterized by the equivalent height, so that the coal stacking degree is evaluated in real-time. The test bed of the belt conveyor deviation and coal stacking monitoring system is built. The test results show the following points. When the speed of the conveyor belt is 0.5-3.0 m/s, the detection error of the edge point of the conveyor belt is − 2.84-1.26 mm, and the maximum error is only 2.84 mm. It shows that the system can reliably realize the function of deviation fault monitoring and accurately predict the deviation trend. Coal samples (14-41 kg, in increments of 1 kg) are stacked on the conveyor belt. When the coal mass is within the range of 14-24 kg and 28-41 kg, the coal stacking detection results are correct. There are detection errors in the range of 25-27 kg. The reason is that the coal sample quality in this range is close to the critical value of 27.6 kg for triggering the coal stacking alarm.
-

图 1 带式输送机跑偏及堆煤监测系统
Figure 1. Deviation and coal stacking monitoring system for belt conveyor
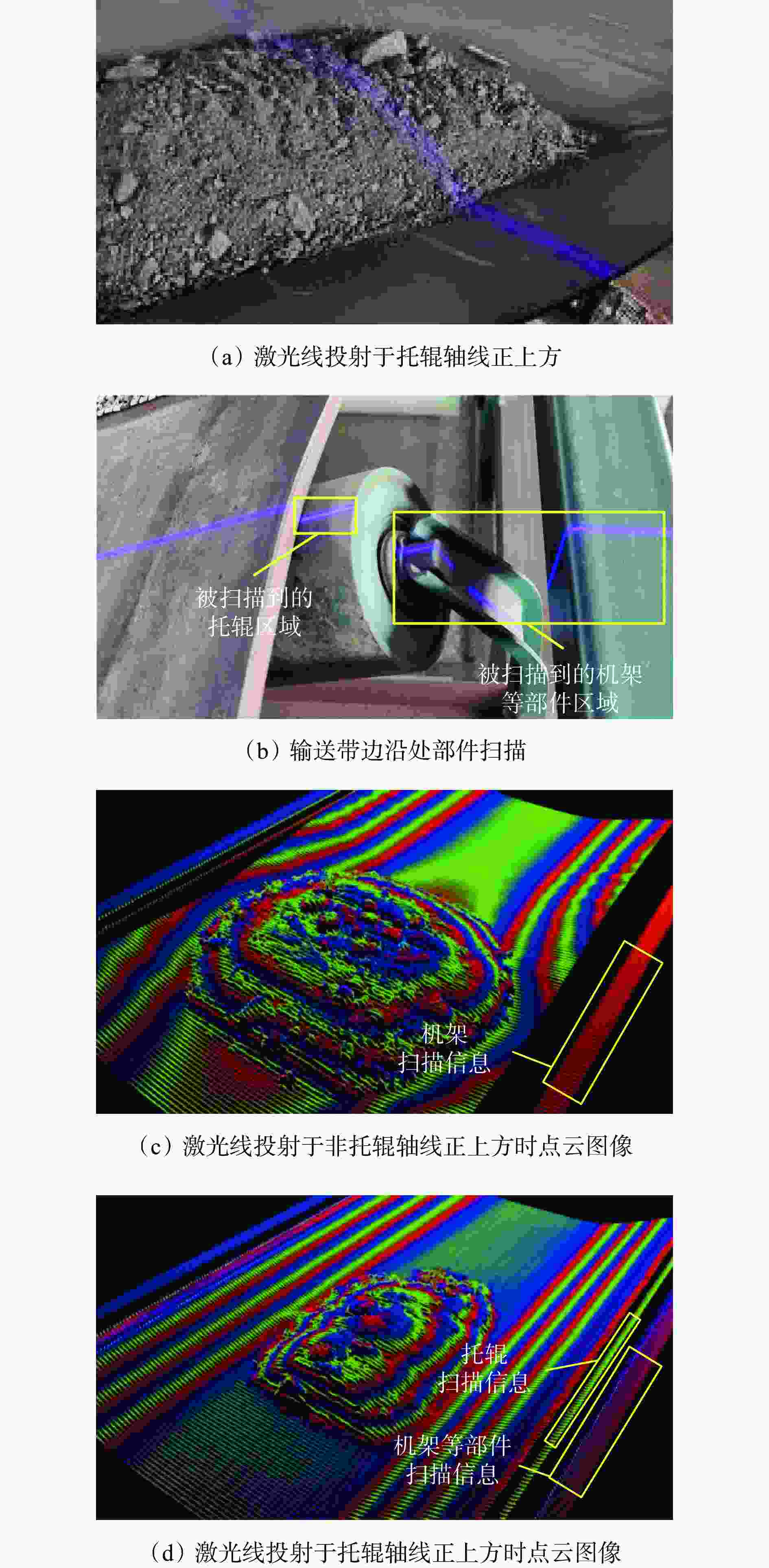
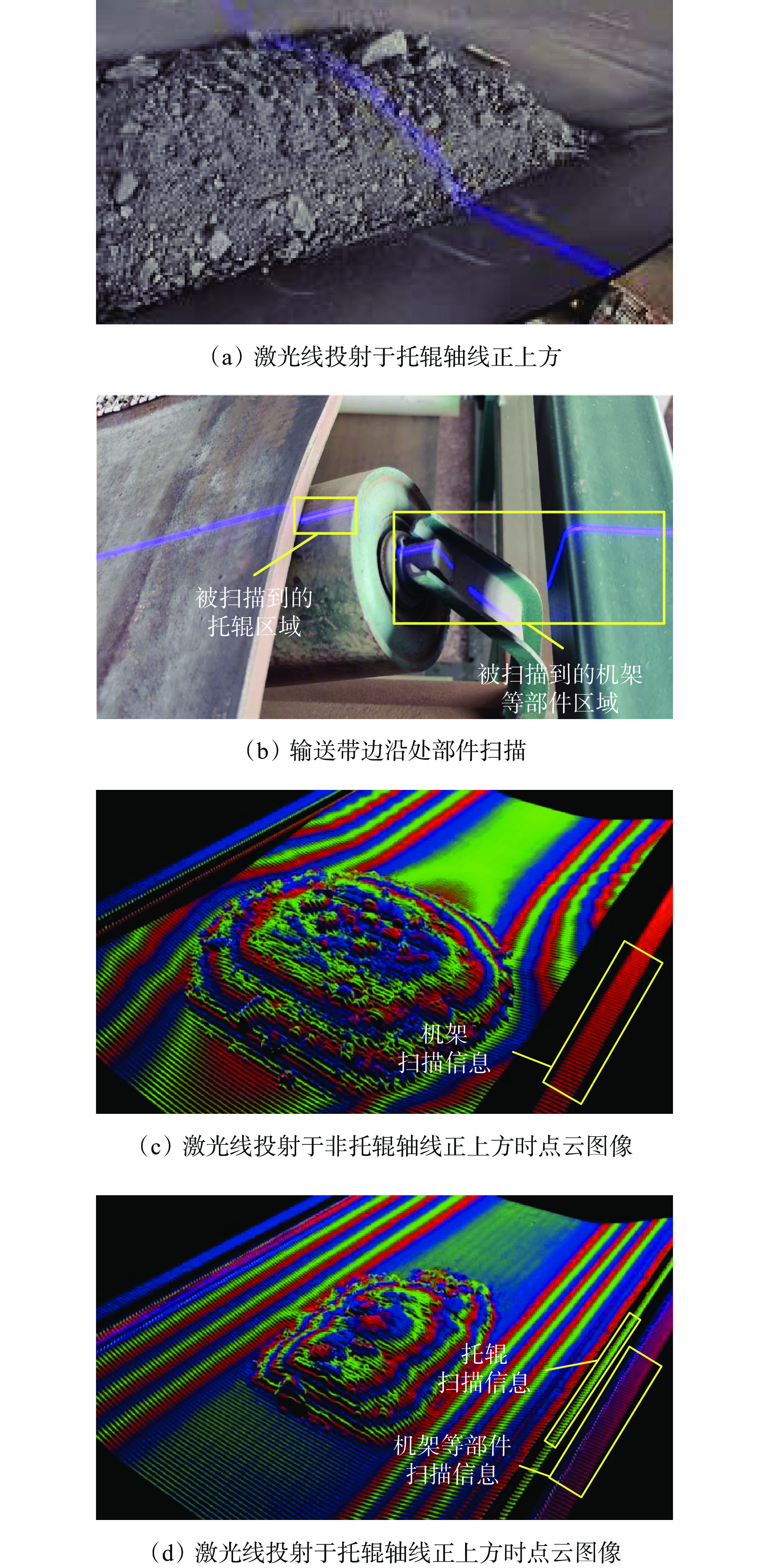
图 2 相机布置位置不同时激光线扫描获取的点云图像
Figure 2. Point cloud images obtained by laser line scanning when camera is at different positions
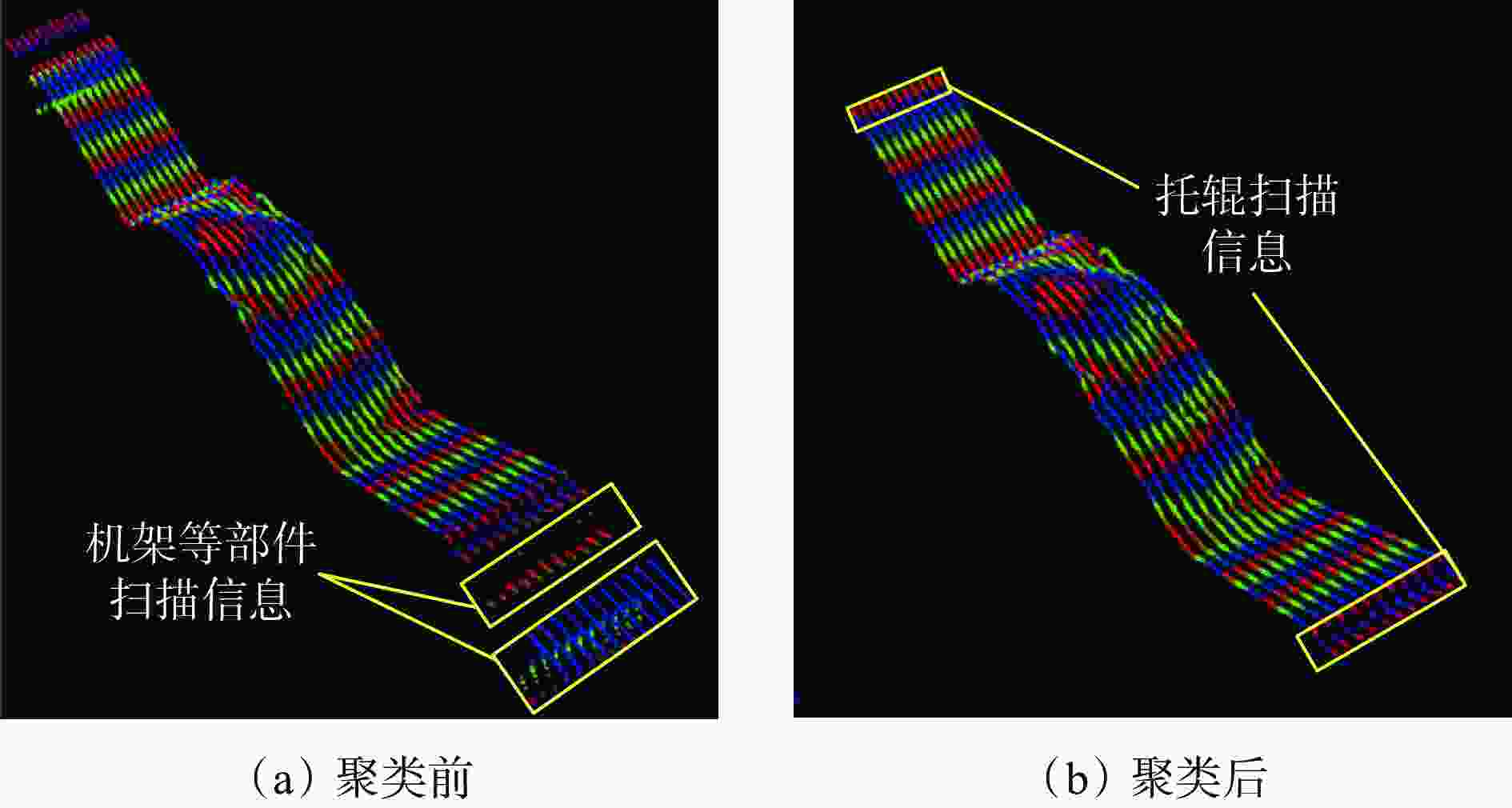
图 3 欧氏聚类前后输送带点云可视化对比
Figure 3. Visual comparison of belt point cloud before and after Euclidean clustering

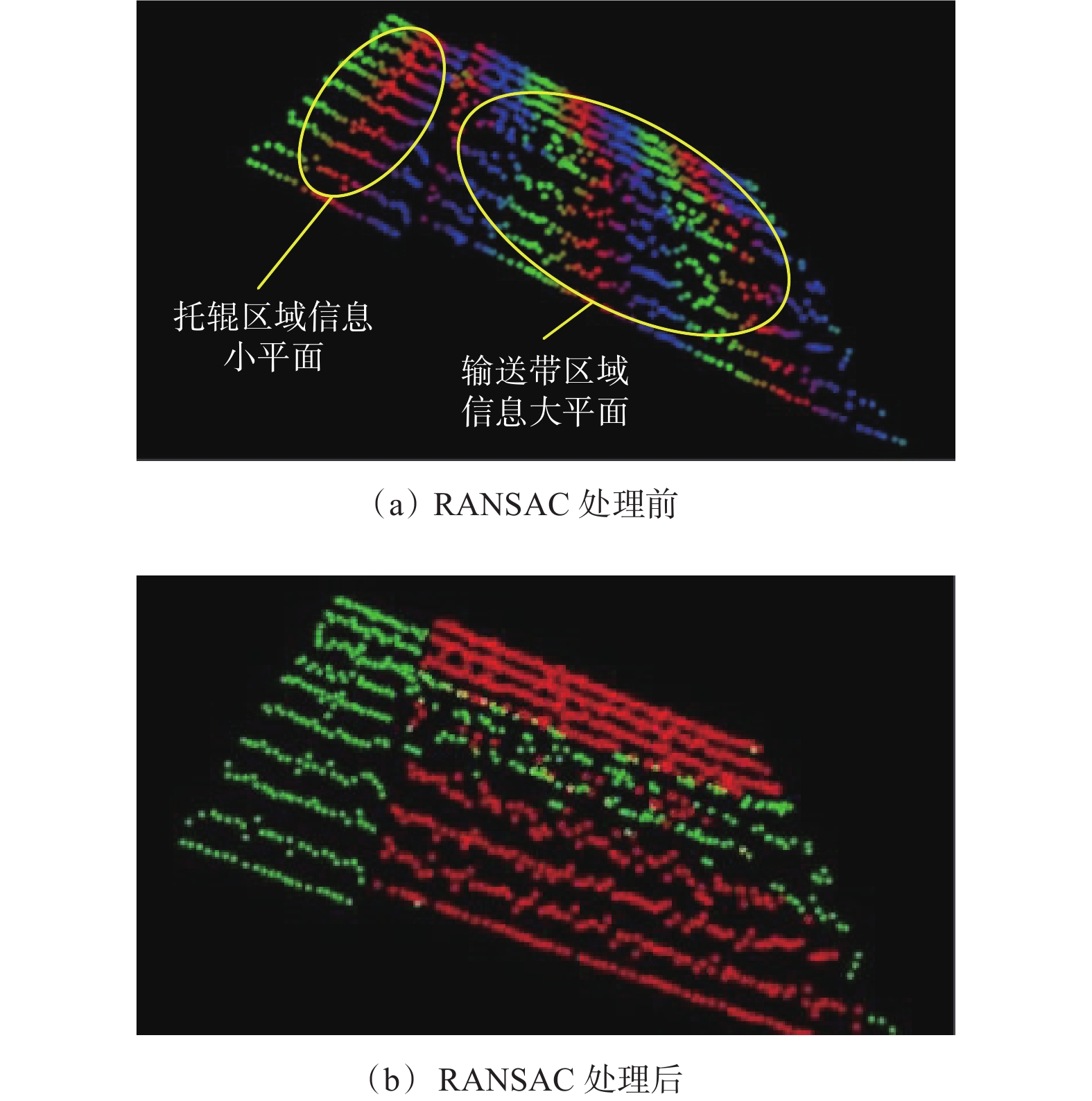
图 4 RANSAC处理前后输送带左侧分段点云可视化对比
Figure 4. Visual comparison of point cloud of left belt segment before and after random sampling consistency processing
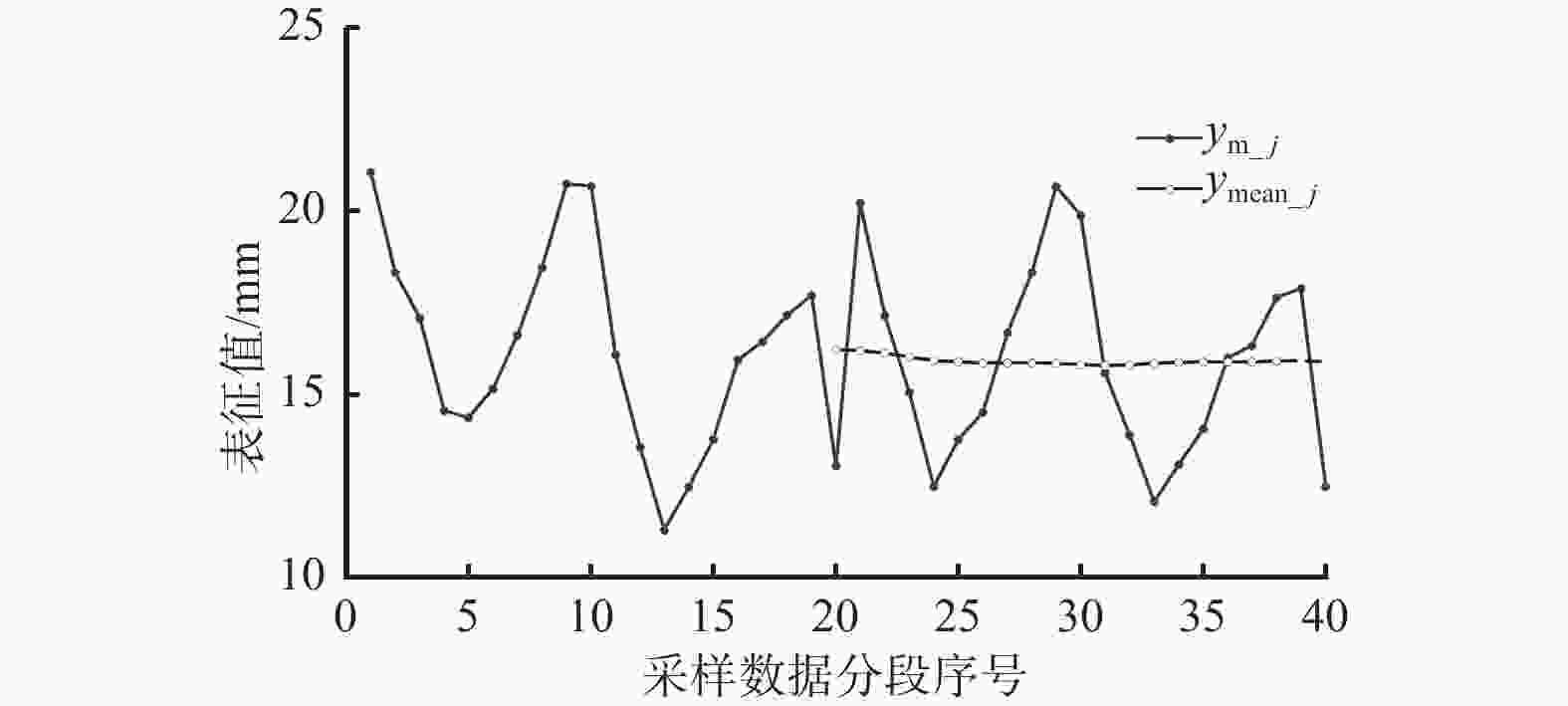
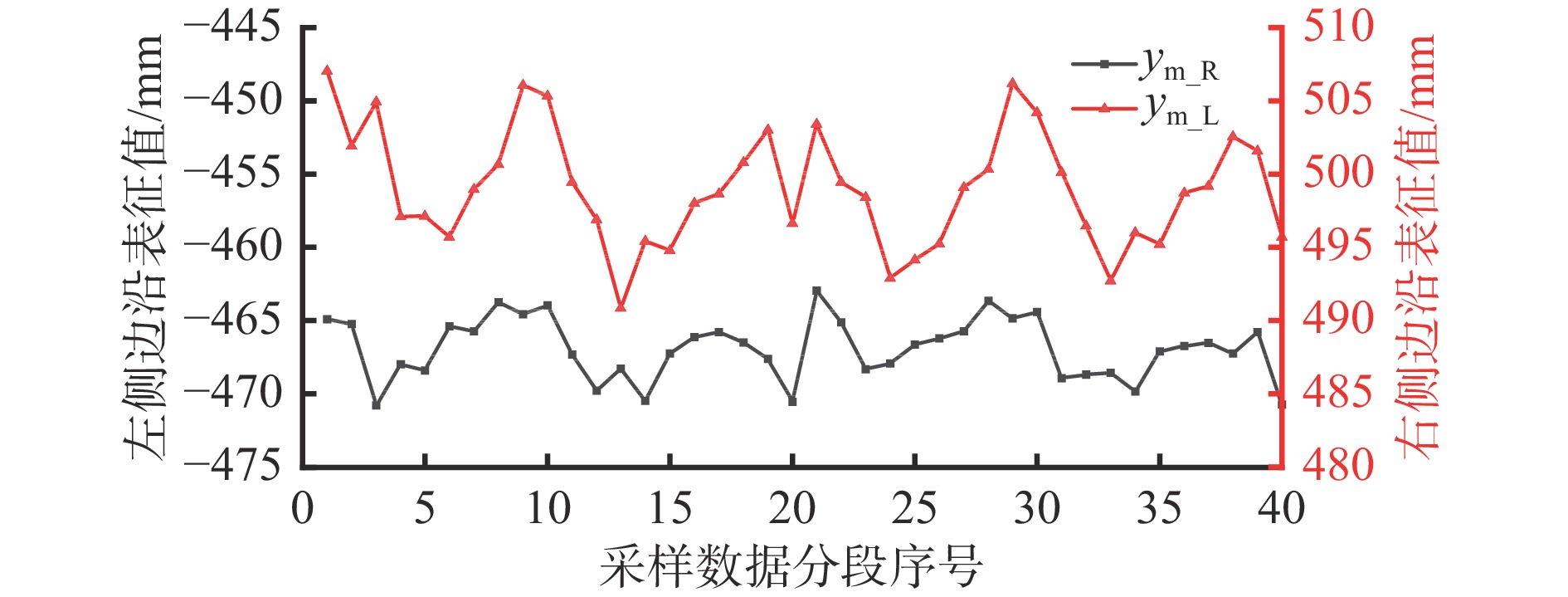
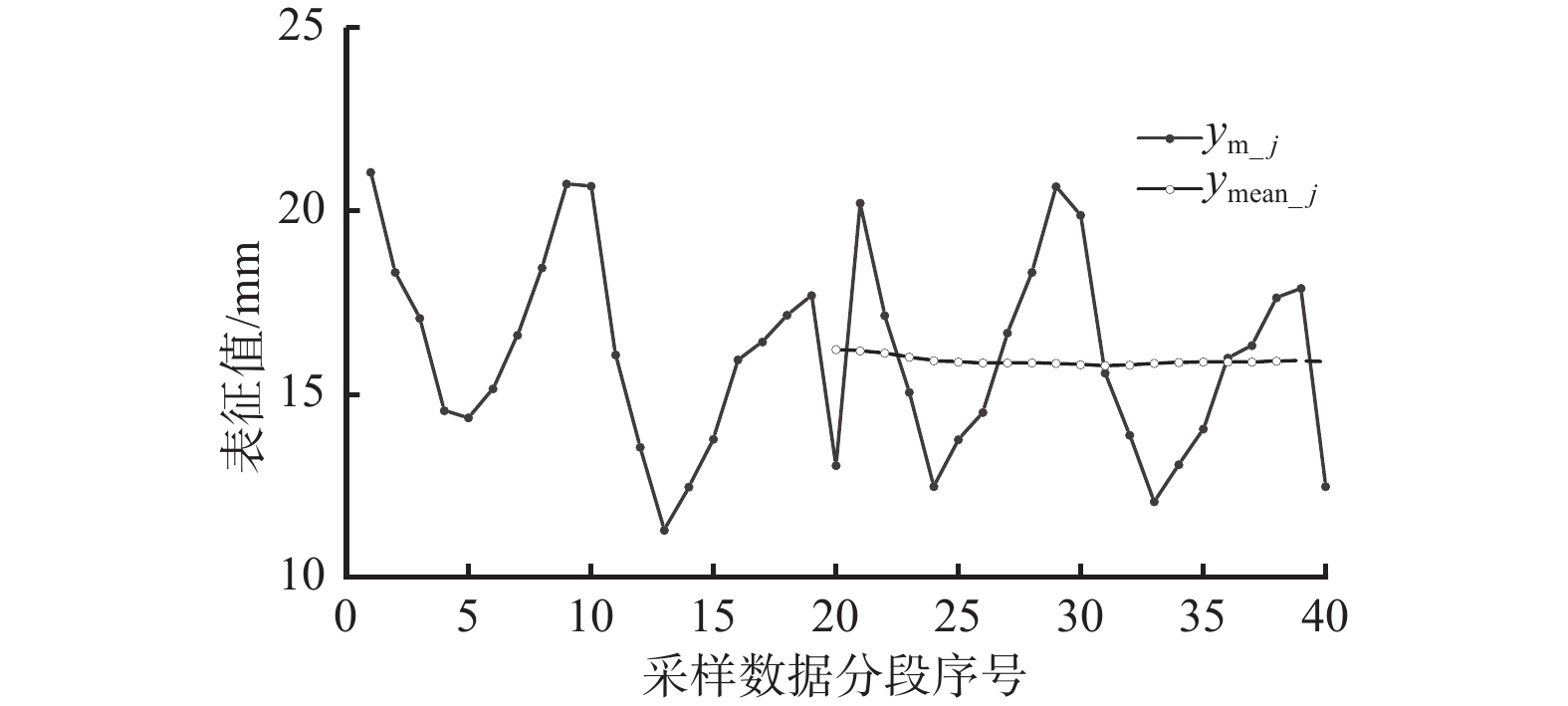
图 6 输送带中心表征值和均中心表征值变化
Figure 6. Change trend of central characterization value and mean central characterization value

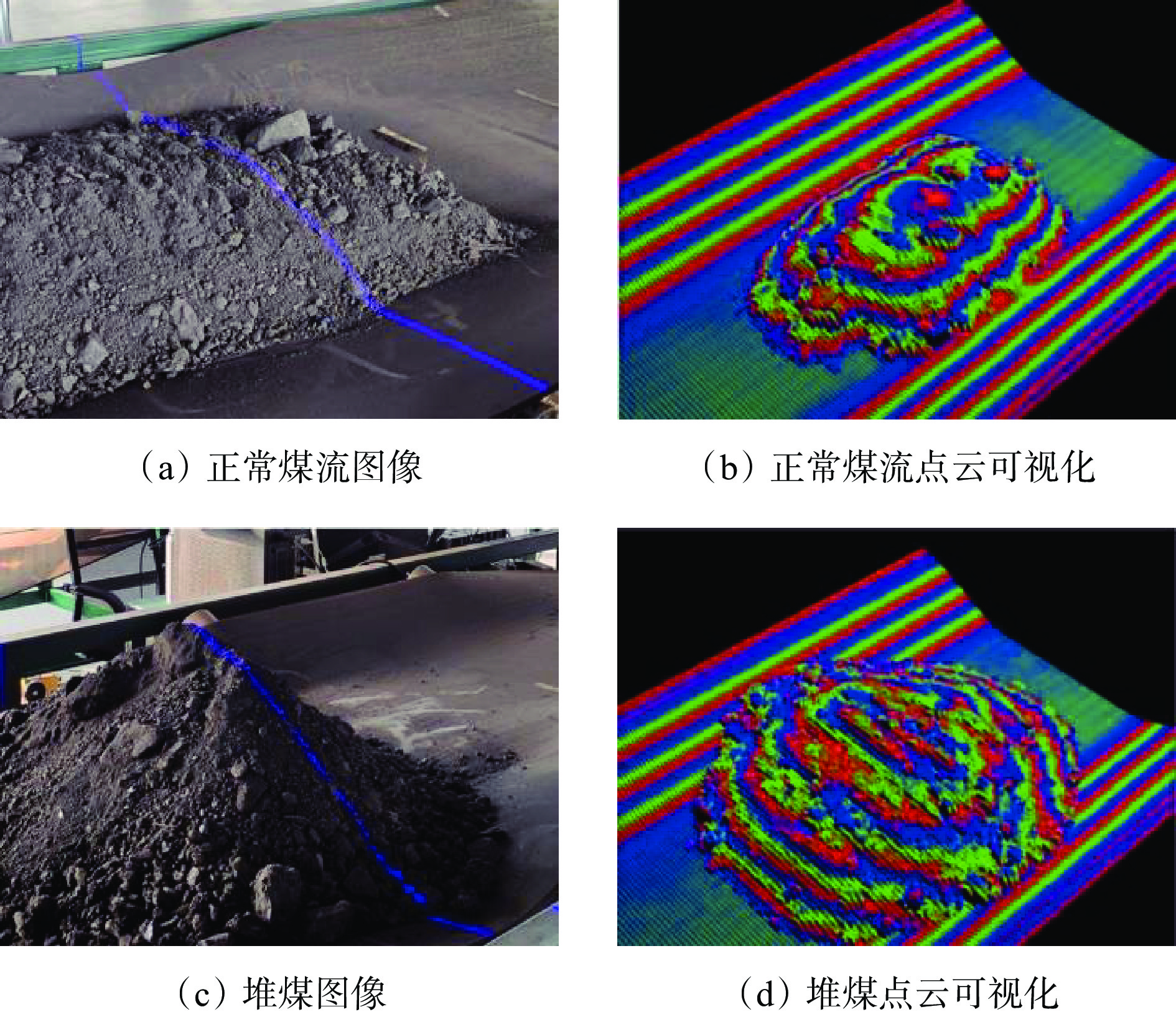
图 7 输送带堆煤前后对比
Figure 7. Comparison of coal flow images and point cloud visualization before and after coal stacking on belt
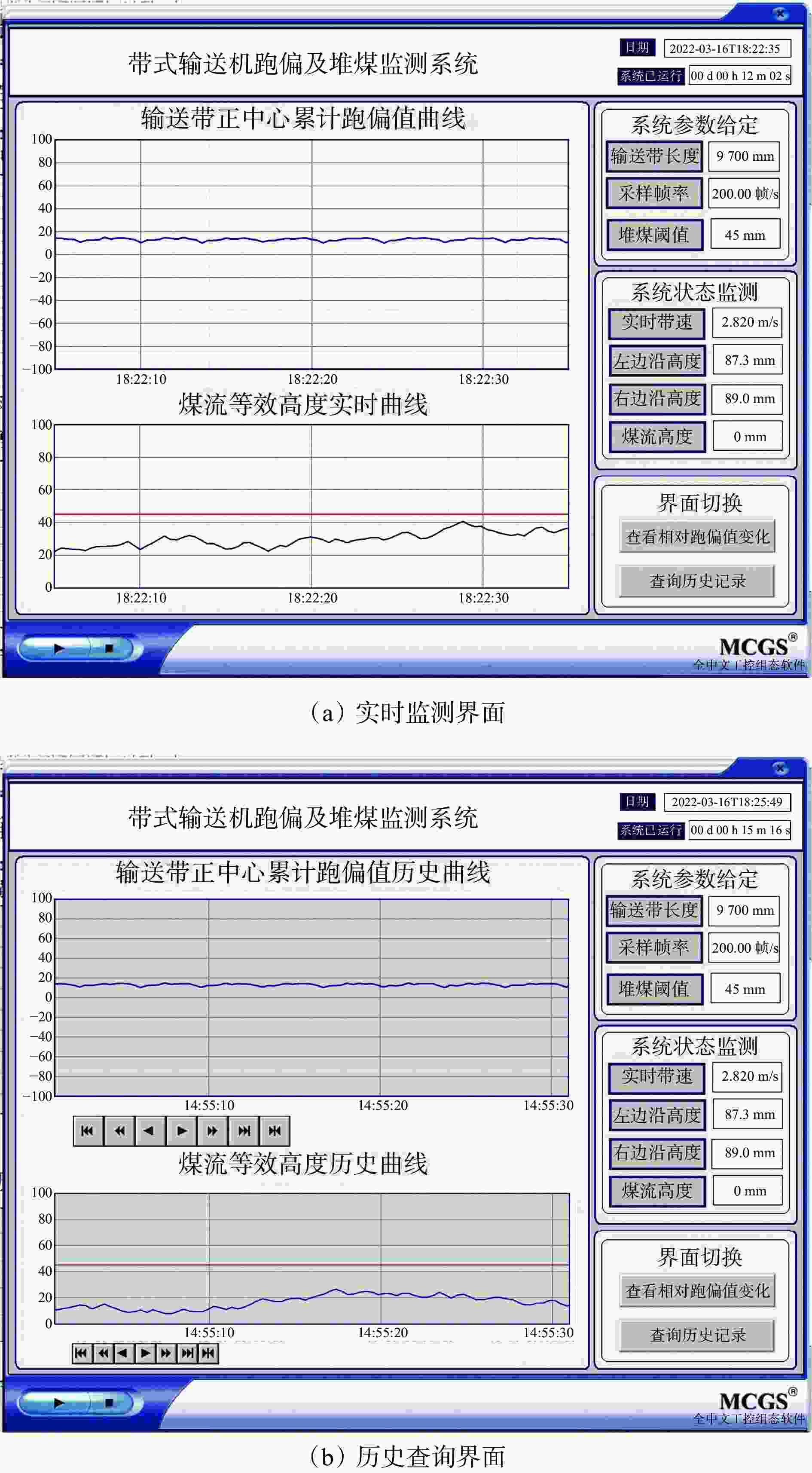
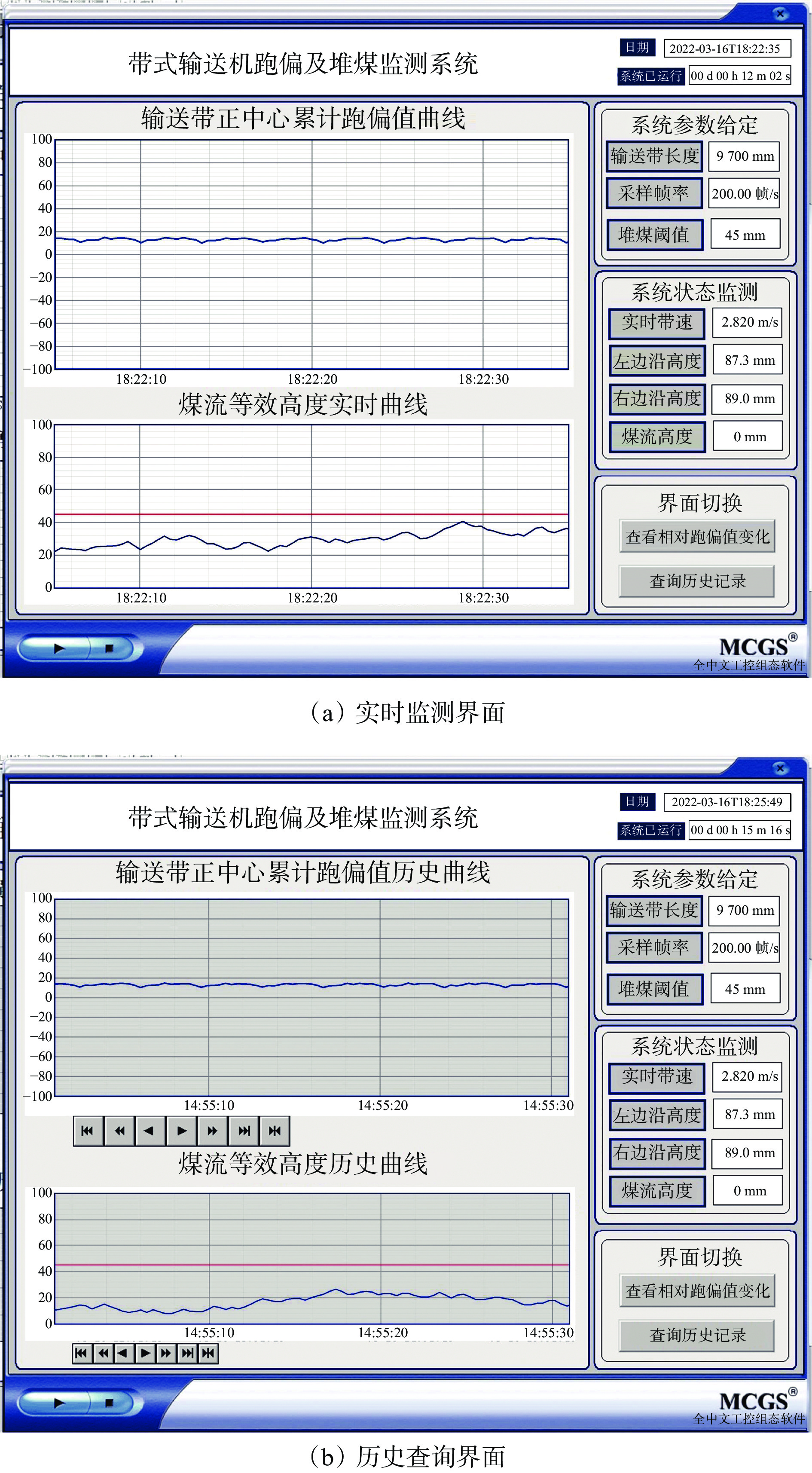
图 8 带式输送机跑偏及堆煤监测系统人机界面
Figure 8. Human-machine interface of deviation and coal stacking monitoring system for belt conveyor

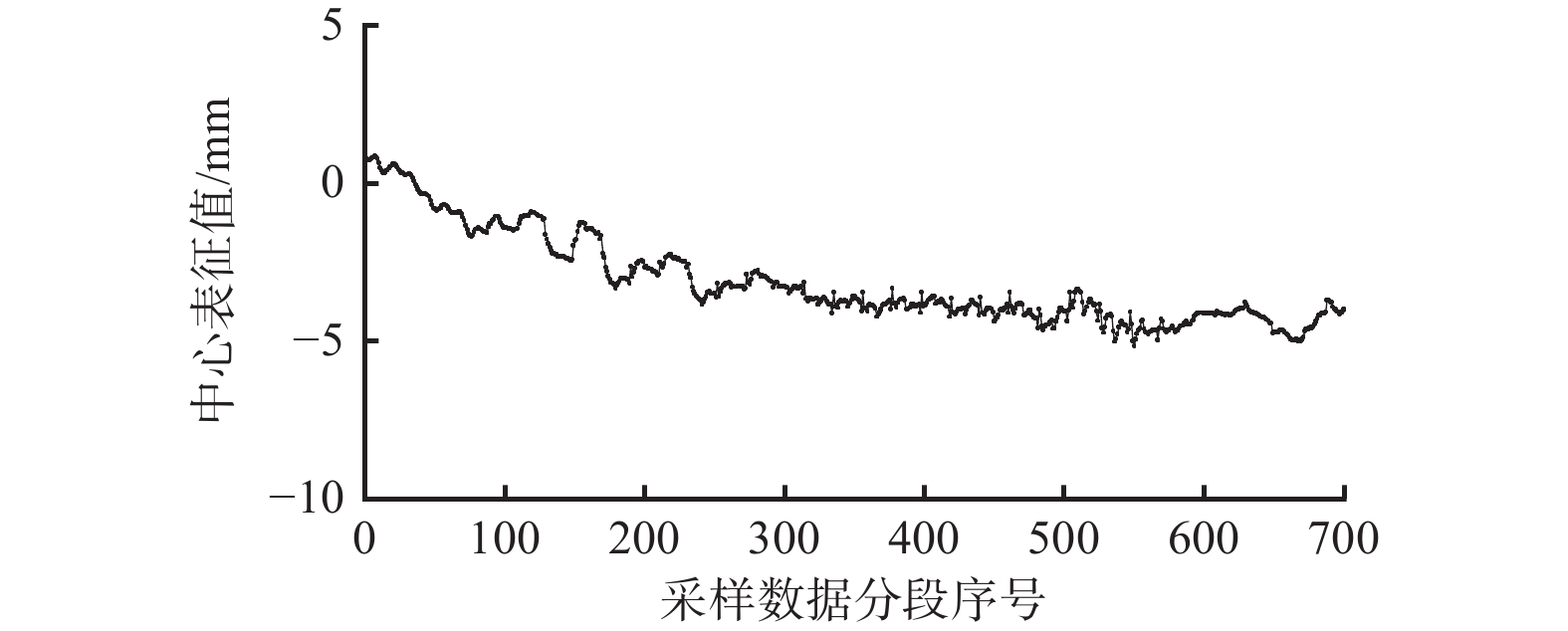
图 11 试验d2−1输送带中心表征值变化
Figure 11. Central characterization value deviation change of belt in test d2-1
表 1 输送带跑偏趋势预测试验结果
Table 1. Prediction test results of forecasting belt deviation trend
速度/(m·s−1) 诱导跑偏方向 试验序号 预测结果 运行圈数 0.5 左 d1−1 正确 1.5 d1−2 正确 1 右 d1−3 正确 2.0 d1−4 正确 3.5 1.0 左 d2−1 错误 − d2−2 正确 2.0 右 d2−3 正确 4.0 d2−4 正确 3.5 1.5 左 d3−1 正确 1.5 d3−2 正确 2.5 右 d3−3 错误 − d3−4 错误 − 2.0 左 d4−1 正确 1.0 d4−2 正确 2.0 右 d4−3 正确 3.5 d4−4 正确 3.5 2.5 左 d5−1 正确 1.0 d5−2 正确 0.5 右 d5−3 正确 1.5 d5−4 正确 1.0 3.0 左 d6−1 正确 0.5 d6−2 正确 0.5 右 d6−3 正确 1.5 d6−4 正确 2.5  下载: 导出CSV
下载: 导出CSV
表 2 输送带堆煤试验结果(部分)
Table 2. Partial test results of coal stacking on belt
样本质量/kg 试验序号 hf_max /mm 是否触发报警 检测结果 25 s12−1 25.44 否 正确 s12−2 28.27 是 错误 s12−3 25.64 否 正确 26 s13−1 26.88 是 错误 s13−2 25.57 否 正确 s13−3 27.77 是 错误 27 s14−1 26.02 否 正确 s14−2 27.74 是 错误 s14−3 27.28 是 错误
下载: 导出CSV
-
[1] LIU Xiangwei,HE Daijie,LODEWIJKS G,et al. Integrated decision making for predictive maintenance of belt conveyor systems[J]. Reliability Engineering & System Safety,2019,188:347-351. [2] CHU Qi, MENG Guoying, FAN Xun. Analysis of speed and belt deviation of the conveyor belt[C]. The International Conference on Materials and Products Manufacturing Technology, Chengdu, 2011: 444-447. [3] ZHANG Mengchao,SHI Hao,YU Yan,et al. A computer vision based conveyor deviation detection system[J]. Applied Sciences-Basel,2020,10(7):2402. doi: 10.3390/app10072402 [4] 王建勋. 煤矿输送带传输故障实时监测技术[J]. 工矿自动化,2015,41(1):45-48.WANG Jianxun. Real-time fault monitoring technology for coal mine conveying belt[J]. Industry and Mine Automation,2015,41(1):45-48. [5] 张春明. 基于线激光辅助的皮带撕裂视觉检测技术研究[D]. 秦皇岛: 燕山大学, 2012.ZHANG Chunming. Research on vision detection technology testing the rip of conveyor belt based on line laser stripe[D]. Qinhuangdao: Yanshan University, 2012. [6] 郭启皇. 基于Otsu算法的输送带撕裂视觉检测系统研究[D]. 太原: 太原理工大学, 2017.GUO Qihuang. Reserch on conveyor belt tear visual inspection system based on Otsu algorithm[D]. Taiyuan: Taiyuan University of Technology, 2017. [7] 吴文臻. 智能视频监控系统在煤矿井下的应用研究[J]. 煤炭技术,2016,35(4):271-273.WU Wenzhen. Application research of intelligent video surveillance system in coal mine[J]. Coal Technology,2016,35(4):271-273. [8] 初琦. 带式输送机动态称重检测理论与试验研究[D]. 北京: 中国矿业大学(北京), 2014.CHU Qi. The method and experimental research on dynamic weighing of belt conveyor[D]. Beijing: China University of Mining and Technology-Beijing, 2014. [9] 李铬,李春广,梁睦,等. 煤矿带式输送机事故分析及防护措施[J]. 中国安全科学学报,2006,16(3):140-144,148.LI Ge,LI Chunguang,LIANG Mu,et al. Accident analysis of belt conveyor used in coal mine and its protective measures[J]. China Safety Science Journal,2006,16(3):140-144,148. [10] 蒋志龙,张大女. 基于ADXL335的堆煤传感器的设计[J]. 工矿自动化,2012,38(8):87-89.JIANG Zhilong,ZHANG Danü. Design of coal piling sensor based on ADXL335[J]. Industry and Mine Automation,2012,38(8):87-89. [11] 孙君,崔凯. 基于水银开关的矿用本安型堆煤传感器的设计[J]. 工矿自动化,2011,37(5):74-75.SUN Jun,CUI Kai. Design of mine-used I. S. sensor of coal piling based on mercury switch[J]. Industry and Mine Automation,2011,37(5):74-75. [12] ZHU Aichun, GANG Hua, WANG Yongxing. The research on the detection method of belt deviation by video in coal mine[C]. The International Conference on Mechatronic Science, Electric Engineering and Computer, Jinan, 2011: 430-433. [13] WANG Jinbo, LIU Qing, DAI Mengting. Belt vision localization algorithm based on machine vision and belt conveyor deviation detection[C]. The 34rd Youth Academic Annual Conference of Chinese Association of Automation, Jinzhou, 2019: 269-273. [14] LIU Yi,MIAO Changyun,LI Xianguo,et al. Research on deviation detection of belt conveyor based on inspection robot and deep learning[J]. Complexity,2021(3):1-15. [15] ZHANG Mengchao,ZHOU Manshan,SHI Hao. A computer vision-based real-time load perception method for belt conveyors[J]. Mathematical Problems in Engineering,2020,2020:1-9. [16] QIAO Wei,LAN Yuan,DONG Huijie,et al. Dual-field measurement system for real-time material flow on conveyor belt[J]. Flow Measurement and Instrumentation,2022,83:102082. doi: 10.1016/j.flowmeasinst.2021.102082 [17] 楚良. 基于三维点云的室外场景分类与重建方法研究[D]. 西安: 西安理工大学, 2020.CHU Liang. Research on outdoor scene classification and reconstruction method based on 3D point cloud[D]. Xi'an: Xi'an University of Technology, 2020. [18] TRYBAŁA P,BLACHOWSKI J,BŁAŻEJ R,et al. Damage detection based on 3D point cloud data processing from laser scanning of conveyor belt surface[J]. Remote Sensing,2020,13(1):55. doi: 10.3390/rs13010055 [19] SCHNABEL R,WAHL R,KLEIN R. Efficient RANSAC for point-cloud shape detection[J]. Computer Graphics Forum,2007,26(2):214-226. doi: 10.1111/j.1467-8659.2007.01016.x [20] YANG Yanli,MIAO Changyun,LI Xianguo,et al. On-line conveyor belts inspection based on machine vision[J]. Optik,2014,125(19):5803-5807. doi: 10.1016/j.ijleo.2014.07.070 -


 点击查看大图
点击查看大图

计量
- 文章访问数: 208
- HTML全文浏览量: 34
- PDF下载量: 51
- 被引次数: 0
