摘要:
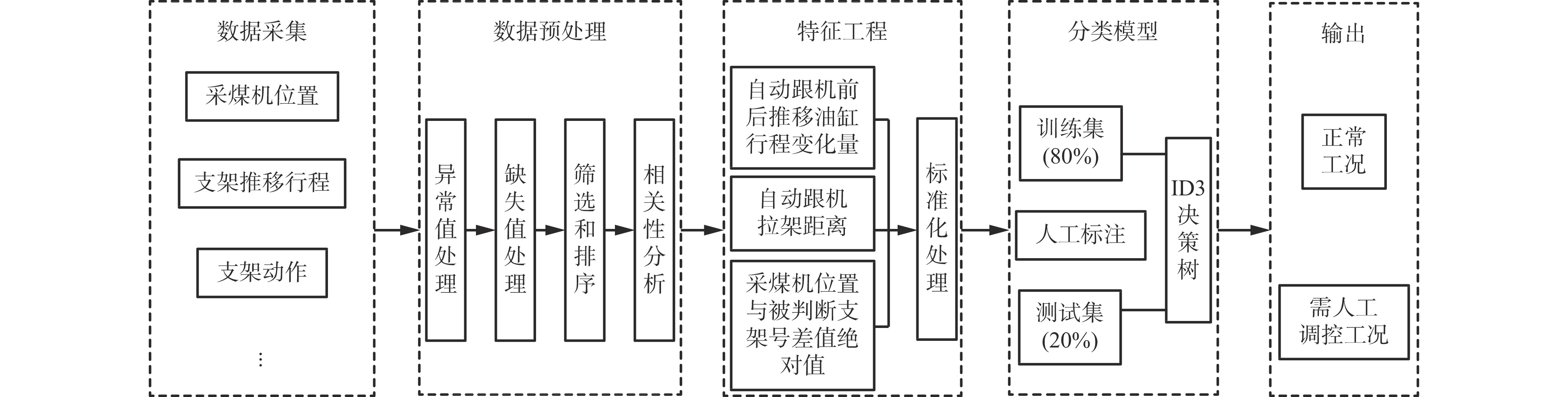
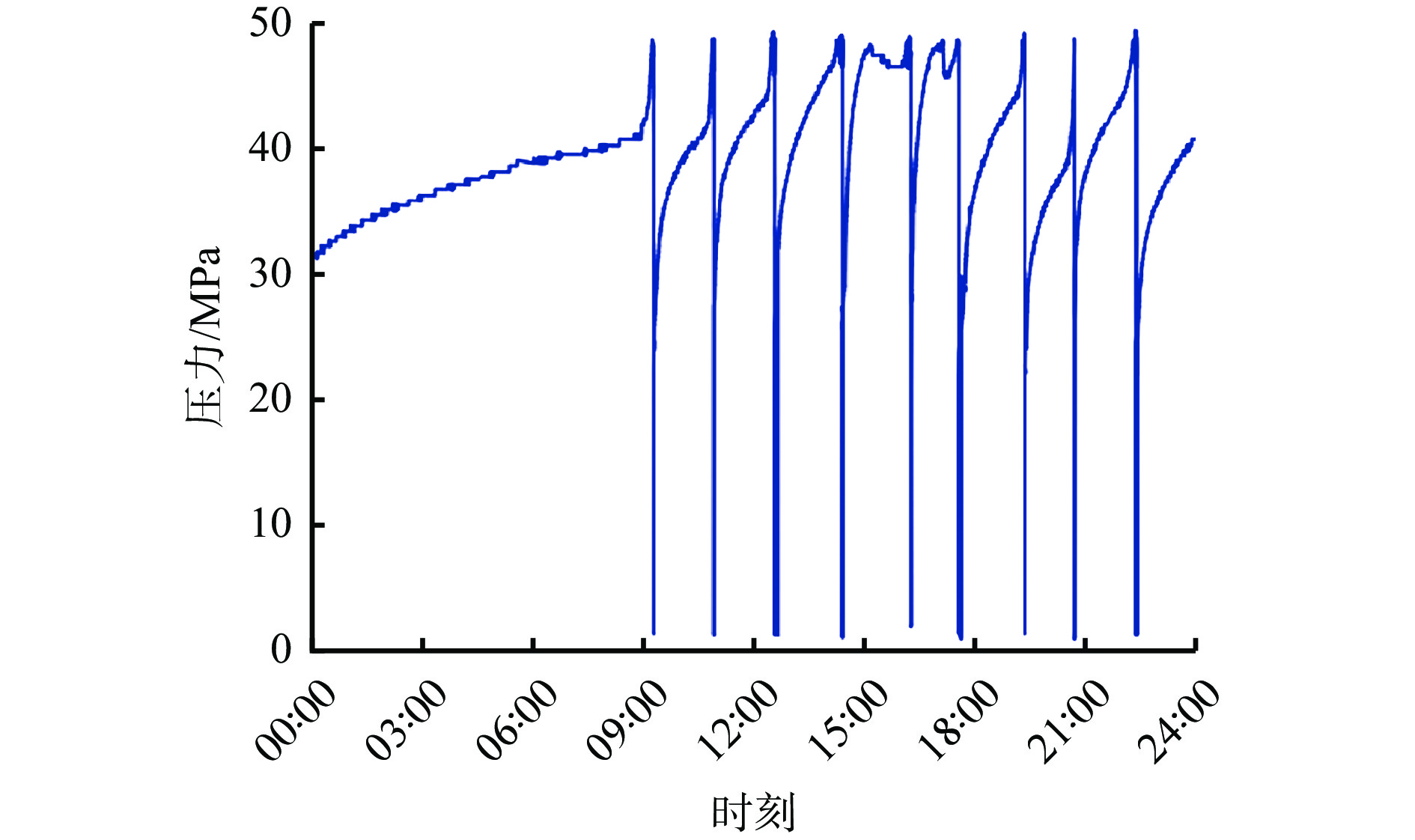
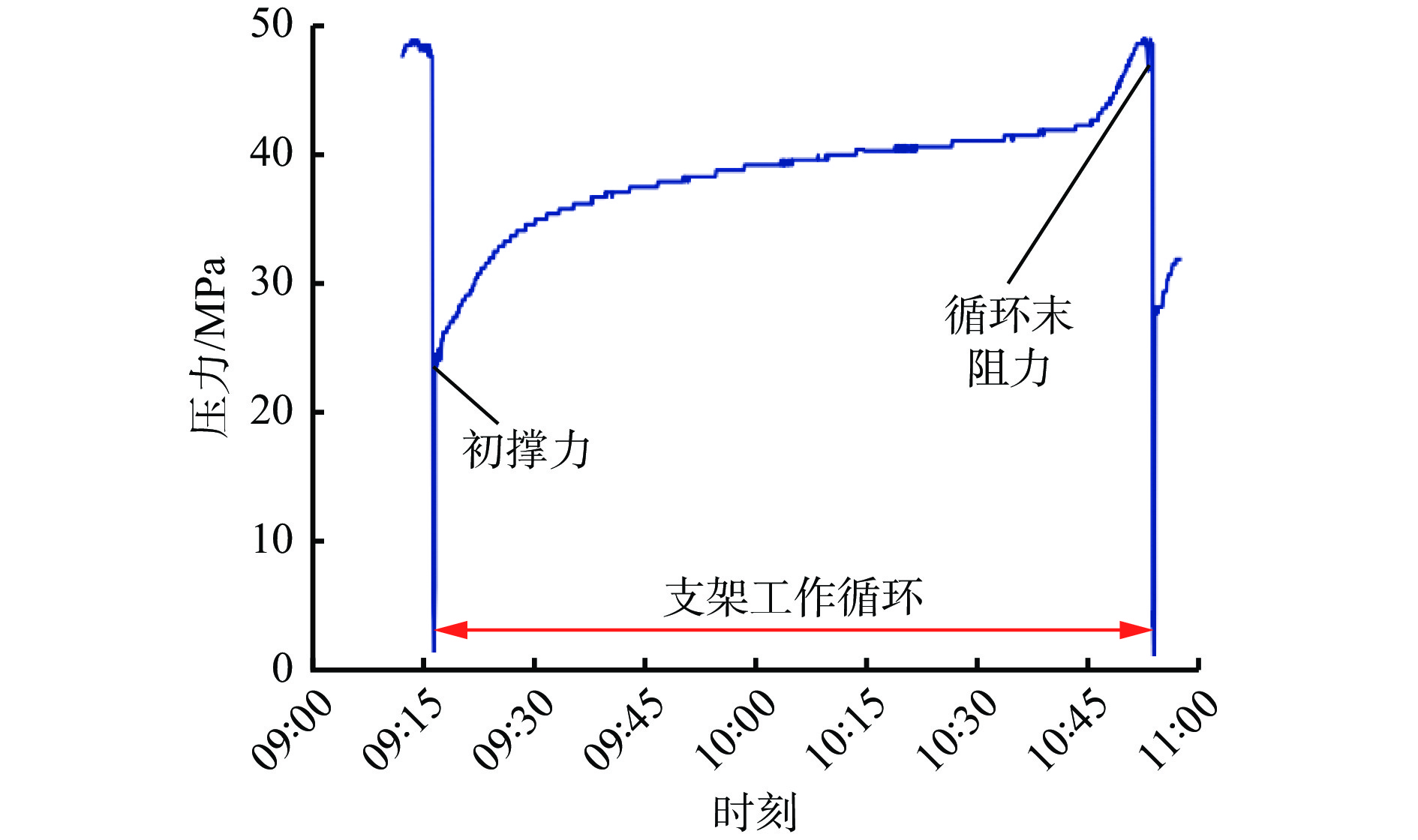
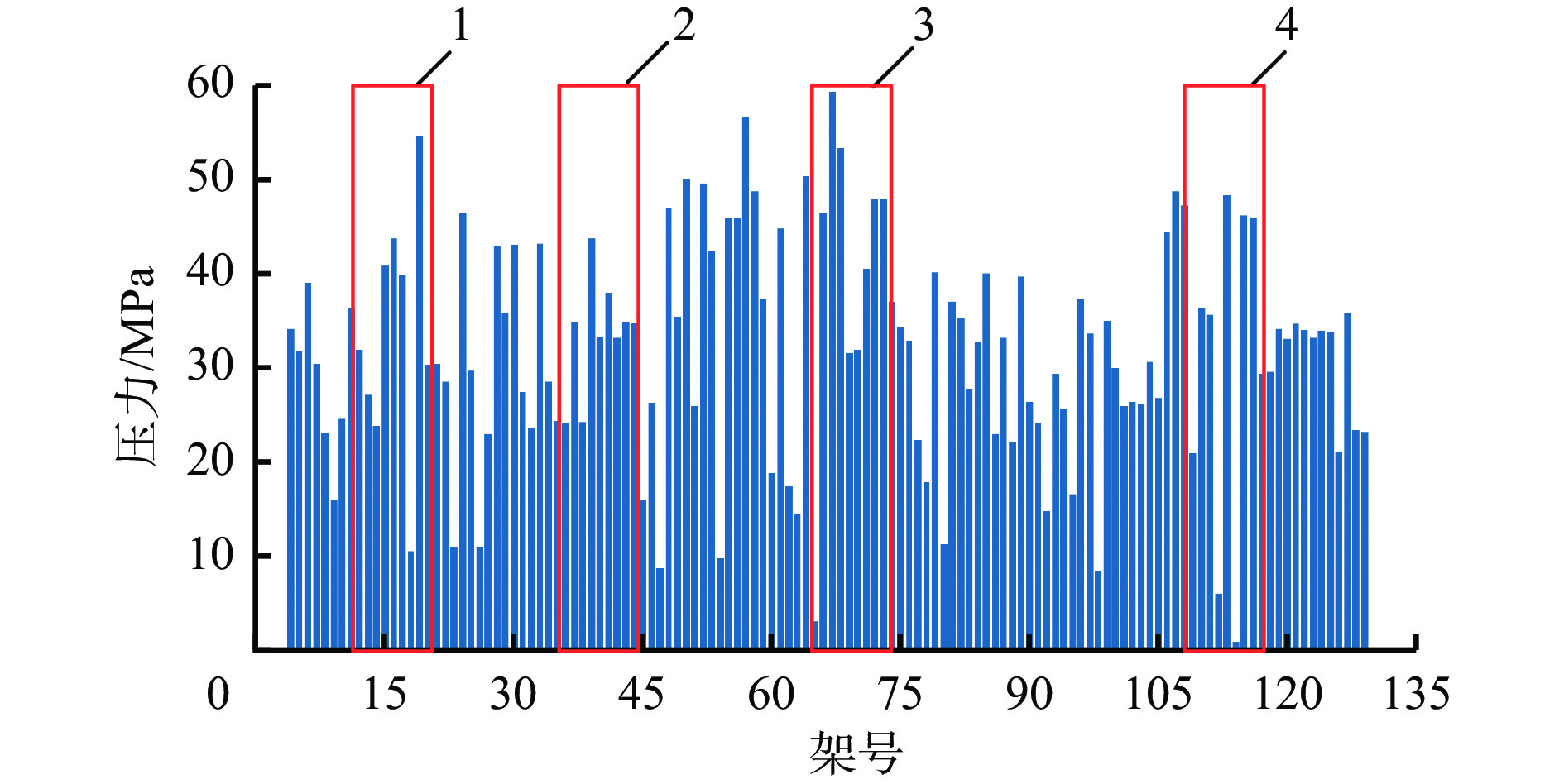
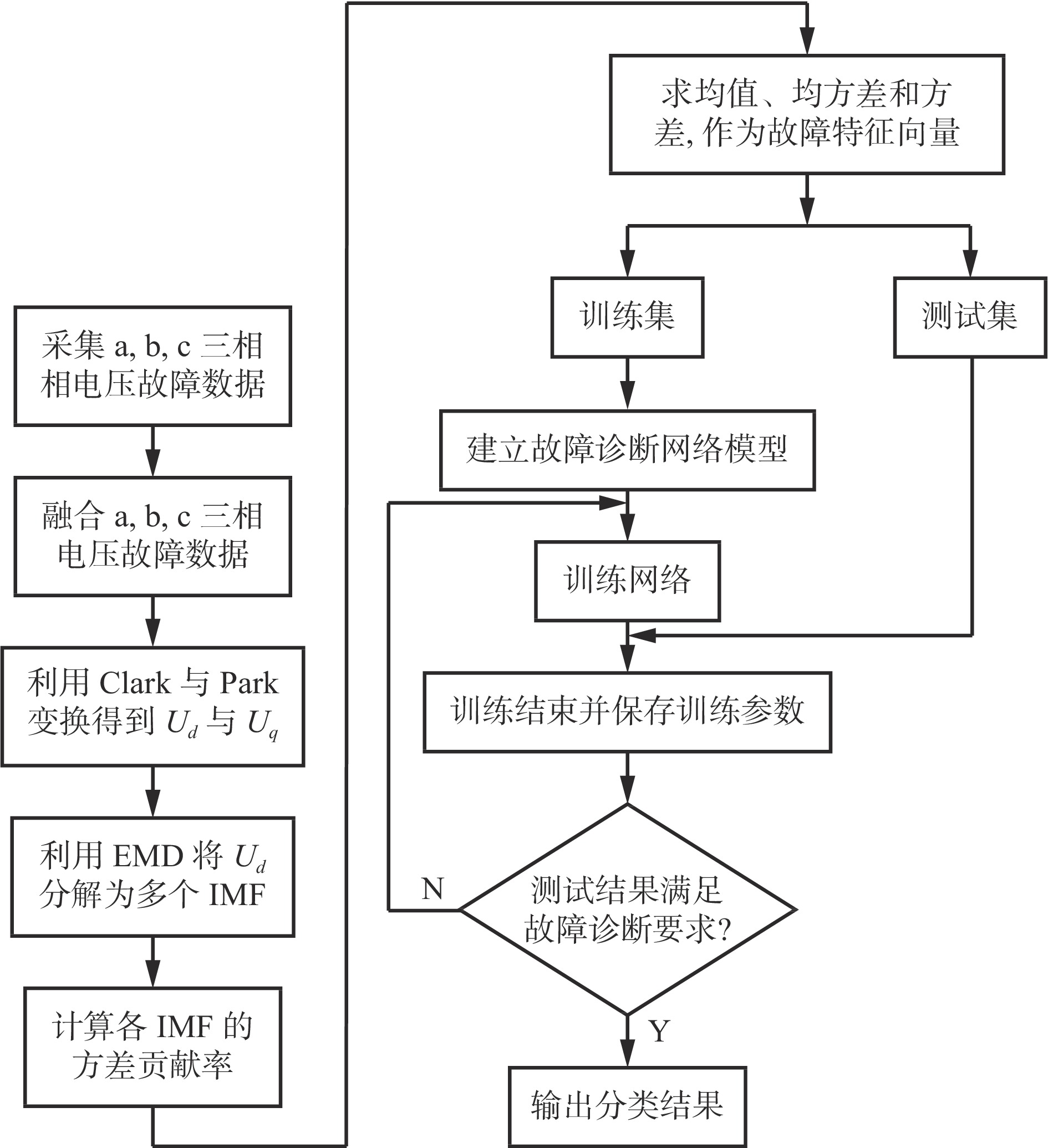
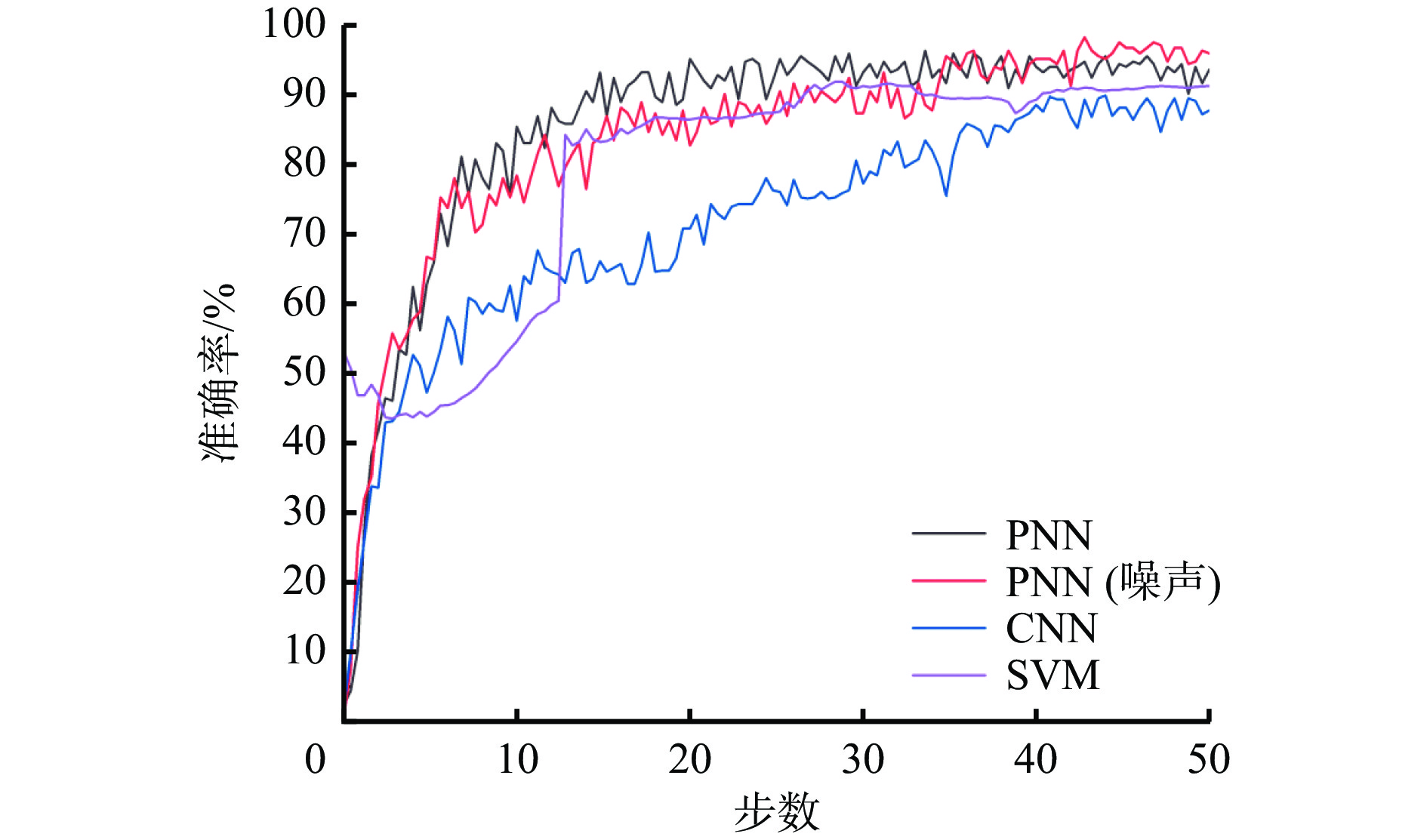
液压支架支护过程是一个时间、空间上的动态变化过程,目前液压支架支护质量评价大多关注支架静态特征,对支架立柱压力动态变化研究较少。针对上述问题,采用深度学习方法构建了一种基于改进型LeNet−5网络的液压支架时空区域支护质量动态评价模型。首先,将工作面液压支架立柱压力数据进行预处理(缺失值填充、异常值处理、筛选、排序等),得到较为完整的液压支架压力数据。其次,将预处理后的液压支架立柱压力数据按照时间和空间排列,并提取反映智采工作面液压支架支护情况的初撑力、循环末阻力、时间加权阻力、阻力空间分布情况等重要特征量,将压力时间序列和空间序列组合为时间−空间二维总时空压力矩阵。再次,根据工作面支护要求,将时空区域支护质量划分为支护质量初步恶化、支护质量持续恶化、支护质量深度恶化、支护质量保持一般、支护质量初步优化、支护质量持续优化、支护质量保持良好7类,在总时空压力矩阵上使用滑动窗口按照一定间隔截取给定大小的子矩阵,将子矩阵与7类时空区域支护质量一一对应,形成样本和标签。最后,将样本和标签输入改进型LeNet−5网络进行训练,构建液压支架时空区域支护质量评价模型,实时评价该区域支架支护情况。实验结果表明:基于改进型LeNet−5网络的液压支架时空区域支护质量评价模型可用于工作面区域内支护质量动态效果辨识,为现场操作人员有针对性地调整液压支架支护状态提供依据,分类准确率为85.25%,比基于LeNet−5网络的模型提高了12%。同时,改进型LeNet−5网络在训练过程中能较快地收敛到最优解,加快了网络训练速度,验证了改进型LeNet−5网络用于智采工作面液压支架时空区域支护质量评价的优势。
贾思锋,付翔,王然风,等. 液压支架时空区域支护质量动态评价[J]. 工矿自动化,2022,48(10):26-33, 81. doi: 10.13272/j.issn.1671-251x.17992.